- Расчёт сооружений на действие подвижных и других временных нагрузок

Содержание
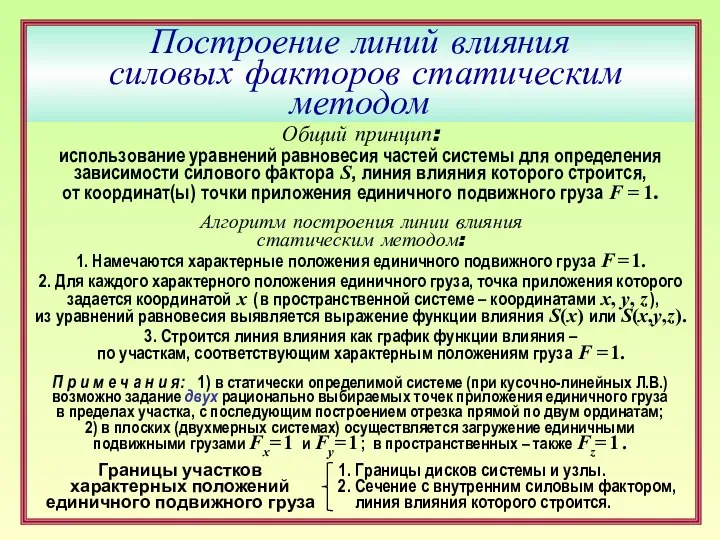
- 2. Построение линий влияния силовых факторов статическим методом Общий принцип: использование уравнений равновесия частей системы для определения
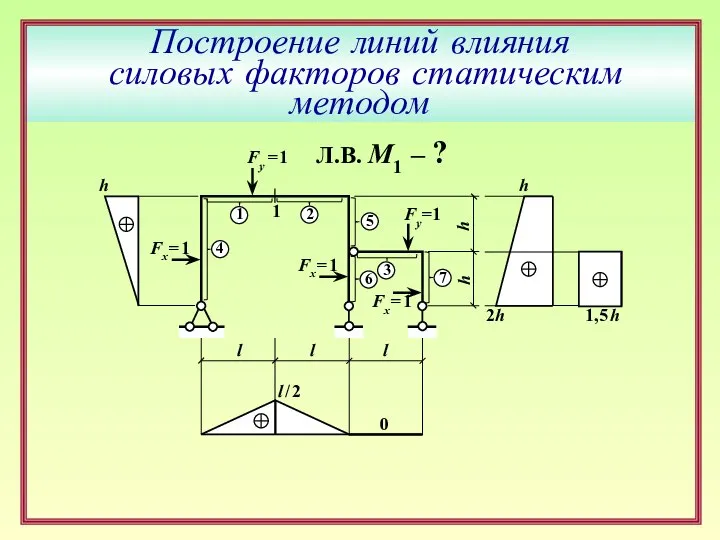
- 3. Построение линий влияния силовых факторов статическим методом 1 l l l h h 1 2 3
- 4. Построение линий влияния силовых факторов статическим методом d F = 1 Л.В. S для основной конструкции
- 5. Построение линий влияния силовых факторов статическим методом F = 1 Л.В. S для основной конструкции (без
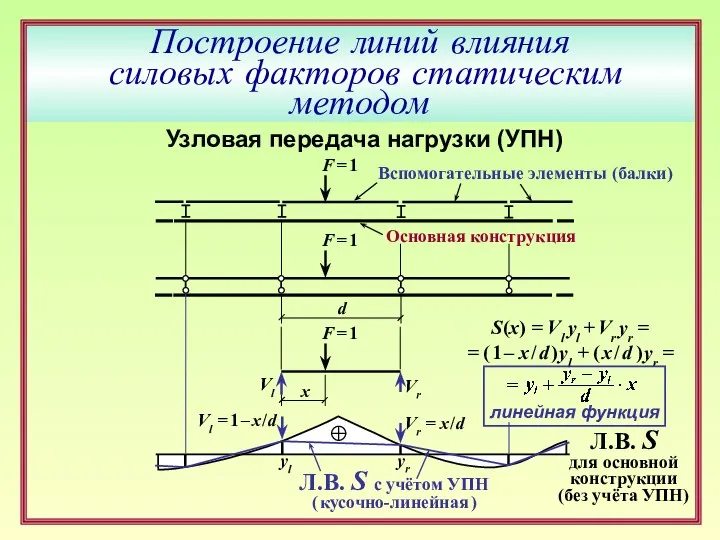
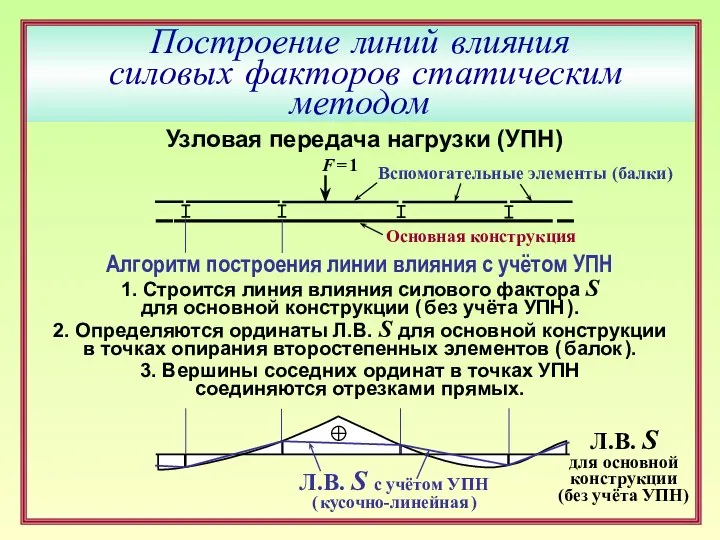
- 6. Построение линий влияния силовых факторов статическим методом F = 1 Узловая передача нагрузки (УПН) Основная конструкция
- 7. Построение линий влияния силовых факторов кинематическим методом Основная формула кинематического метода при построении линий влияния Из
- 8. При обеспечении условия Wint (x) = 0 ( в случае статически определимой системы – за счет
- 9. Алгоритм построения линии влияния силового фактора кинематическим методом 1. В системе, находящейся в равновесии при произвольно
- 10. П р и м е р а а а 2а а 2а 2а а 1 Требуется
- 11. П р и м е р а а а 2а а 2а 2а а 1 F
- 12. П р и м е р а а а 2а а 2а 2а а 1 F
- 13. П р и м е р а а а 2а а 2а 2а а F =
- 14. а а а 2а а 2а 2а а F = 1 x M1 δS = δM
- 15. а а а 2а а 2а 2а а 1 F = 1 Линия влияния М1 П
- 17. Скачать презентацию
Построение линий влияния
силовых факторов статическим методом
Общий принцип:
использование уравнений равновесия
Построение линий влияния
силовых факторов статическим методом
Общий принцип:
использование уравнений равновесия
Построение линий влияния
силовых факторов статическим методом
1
l
l
l
h
h
1
2
3
4
5
6
7
Fy = 1
Fy=1
Fx= 1
Fx= 1
Fx=
Построение линий влияния
силовых факторов статическим методом
1
l
l
l
h
h
1
2
3
4
5
6
7
Fy = 1
Fy=1
Fx= 1
Fx= 1
Fx=
Построение линий влияния
силовых факторов статическим методом
d
F = 1
Л.В. S
для
Построение линий влияния
силовых факторов статическим методом
d
F = 1
Л.В. S
для
Построение линий влияния
силовых факторов статическим методом
F = 1
Л.В. S
для
Построение линий влияния
силовых факторов статическим методом
F = 1
Л.В. S
для
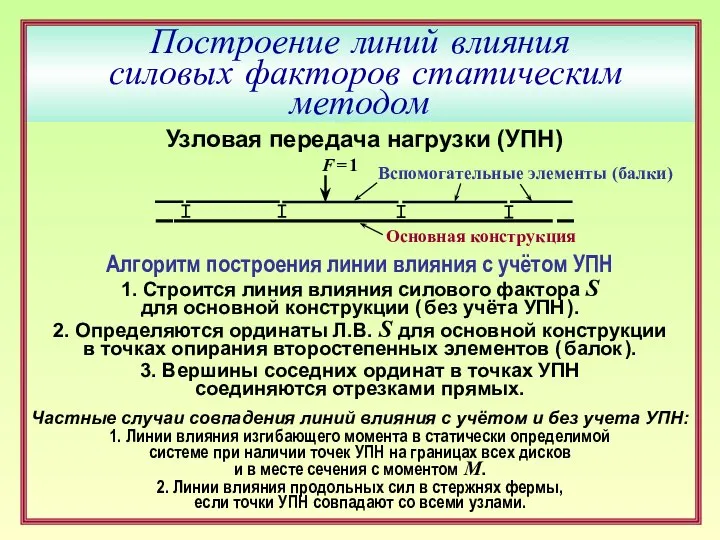
Построение линий влияния
силовых факторов статическим методом
F = 1
Узловая передача нагрузки
Построение линий влияния
силовых факторов статическим методом
F = 1
Узловая передача нагрузки
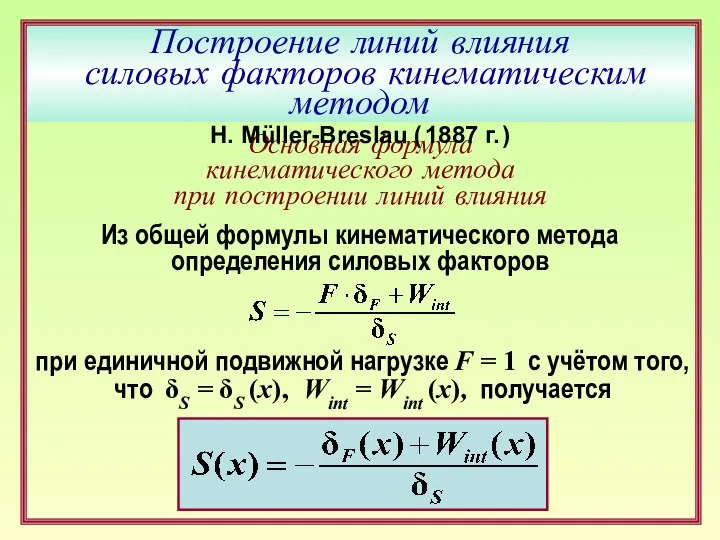
Построение линий влияния
силовых факторов кинематическим методом
Основная формула
кинематического метода
при построении
Построение линий влияния
силовых факторов кинематическим методом
Основная формула кинематического метода при построении
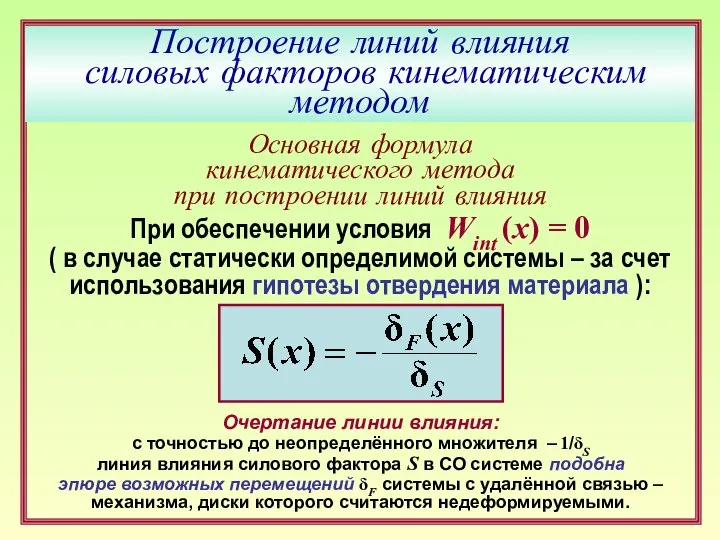
При обеспечении условия Wint (x) = 0
( в случае статически
При обеспечении условия Wint (x) = 0
( в случае статически
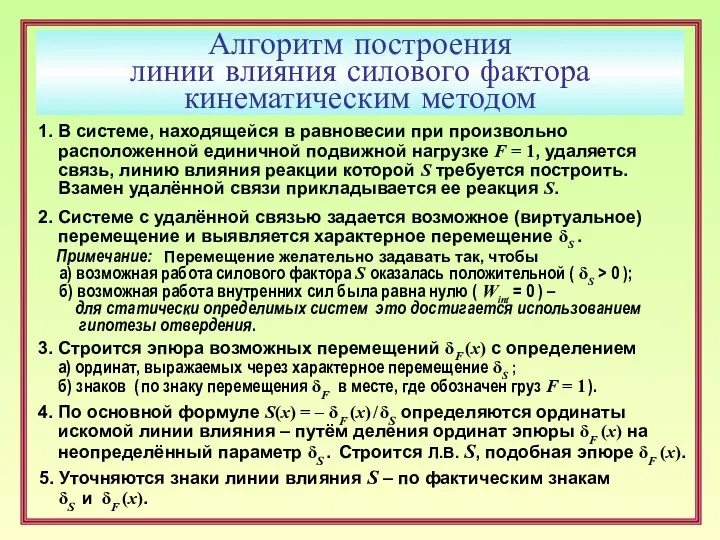
Алгоритм построения
линии влияния силового фактора кинематическим методом
1. В системе, находящейся
Алгоритм построения
линии влияния силового фактора кинематическим методом
1. В системе, находящейся
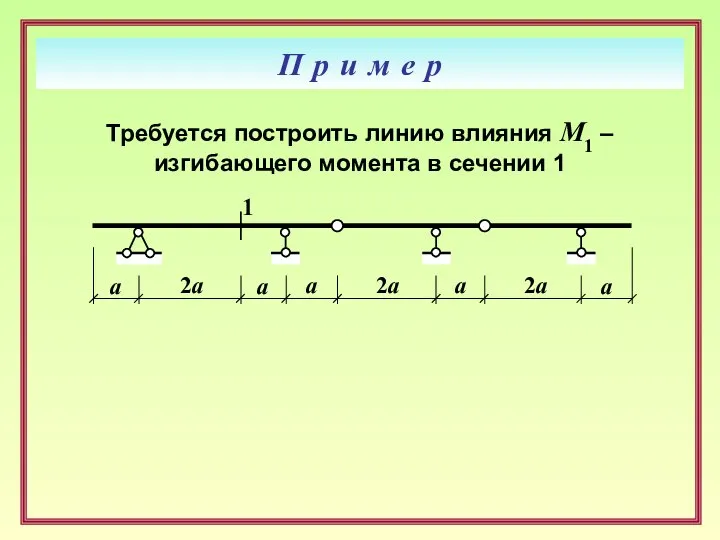
П р и м е р
а
а
а
2а
а
2а
2а
а
1
Требуется построить линию влияния М1 –
П р и м е р
а
а
а
2а
а
2а
2а
а
1
Требуется построить линию влияния М1 –
П р и м е р
а
а
а
2а
а
2а
2а
а
1
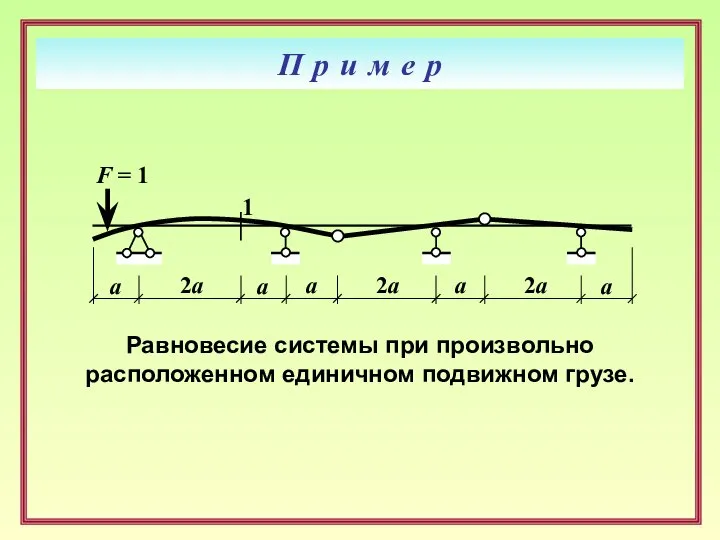
F = 1
Равновесие системы при произвольно
П р и м е р
а
а
а
2а
а
2а
2а
а
1
F = 1
Равновесие системы при произвольно
П р и м е р
а
а
а
2а
а
2а
2а
а
1
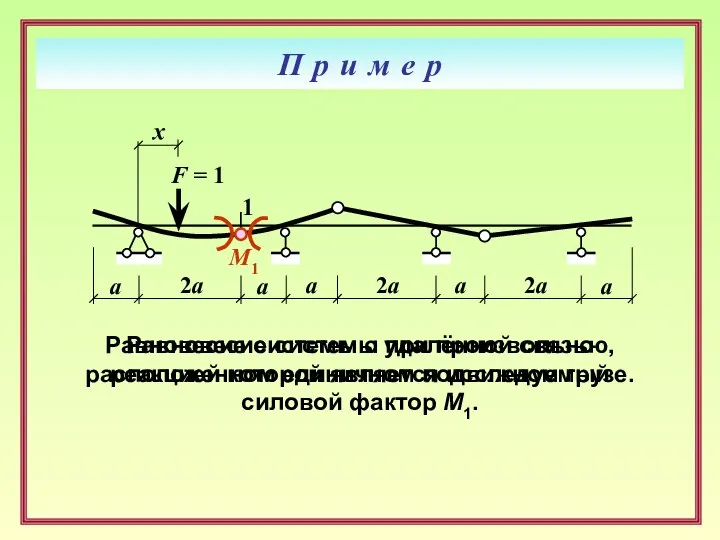
F = 1
x
Равновесие системы при произвольно
П р и м е р
а
а
а
2а
а
2а
2а
а
1
F = 1
x
Равновесие системы при произвольно

П р и м е р
а
а
а
2а
а
2а
2а
а
F = 1
x
M1
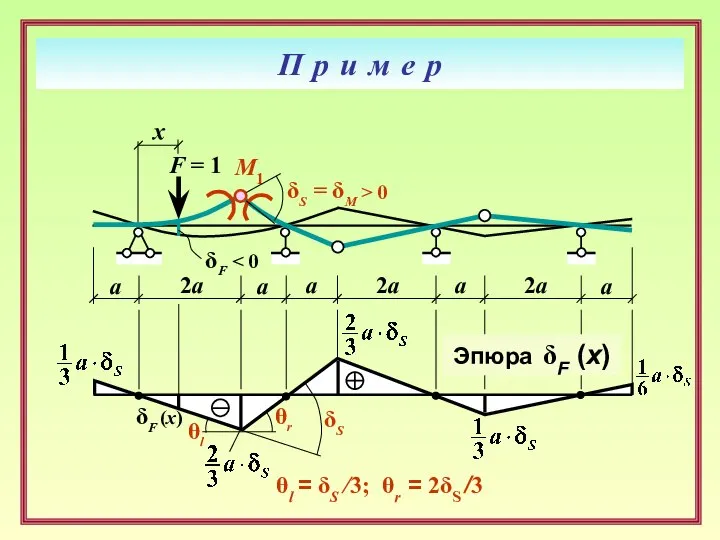
δS = δM
Возможное перемещение
П р и м е р
а
а
а
2а
а
2а
2а
а
F = 1
x
M1
δS = δM
Возможное перемещение
а
а
а
2а
а
2а
2а
а
F = 1
x
M1
δS = δM
δF < 0
> 0
δF (x)
δS
θl
θr
Эпюра δF (x)
θl
а
а
а
2а
а
2а
2а
а
F = 1
x
M1
δS = δM
δF < 0
> 0
δF (x)
δS
θl
θr
Эпюра δF (x)
θl

а
а
а
2а
а
2а
2а
а
1
F = 1
Линия влияния М1
П р и м е р
а
а
а
2а
а
2а
2а
а
1
F = 1
Линия влияния М1
П р и м е р
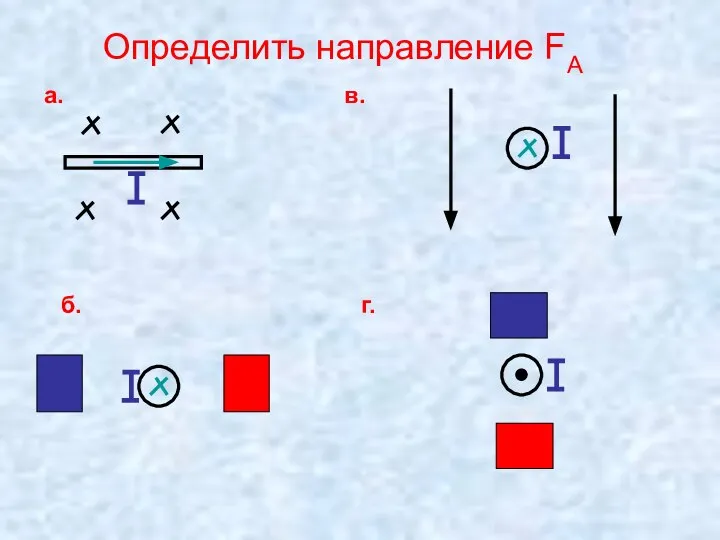 Определить направление FА
Определить направление FА  Динамика материальной точки
Динамика материальной точки Кинематика вращательного движения
Кинематика вращательного движения Отчет стажировки на должность контролера в производстве черных металлов
Отчет стажировки на должность контролера в производстве черных металлов Червячные передачи
Червячные передачи Перехід метал-діелектрик та його загальні характеристики
Перехід метал-діелектрик та його загальні характеристики Учитель физики МОУ ВСОШ №2 Заикина Н.В.
Учитель физики МОУ ВСОШ №2 Заикина Н.В. Молния в физике
Молния в физике Модели атомов. Опыт Резерфорда. _
Модели атомов. Опыт Резерфорда. _ Использование электромагнитной индукции Трансформаторы: устройство и принцип действия
Использование электромагнитной индукции Трансформаторы: устройство и принцип действия Деформація. Сила пружності
Деформація. Сила пружності Агрегатное состояние вещества (8 класс)
Агрегатное состояние вещества (8 класс) Прикладная голография. Техника голографического эксперимента. (Лекция 7)
Прикладная голография. Техника голографического эксперимента. (Лекция 7)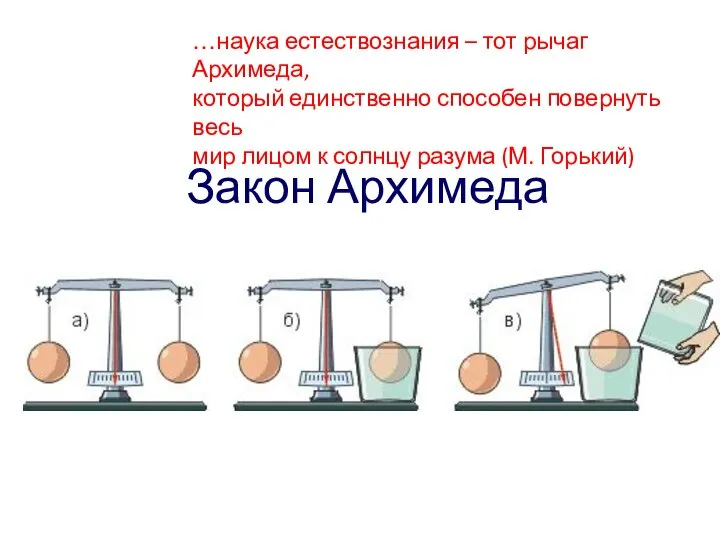 Закон Архимеда
Закон Архимеда Изгиб. Расчет на жесткость
Изгиб. Расчет на жесткость Основные характеристики поля излучения
Основные характеристики поля излучения Системы измерения давления на технологическом оборудовании складов ГСМ
Системы измерения давления на технологическом оборудовании складов ГСМ Проводники и диэлектрики в электростатическом поле
Проводники и диэлектрики в электростатическом поле Презентация к сообщению учащегося 10а класса гимназии №4 г. Читы
Презентация к сообщению учащегося 10а класса гимназии №4 г. Читы Распространение волн в упругих средах. Уравнение гармонической бегущей Колебания волны и волны
Распространение волн в упругих средах. Уравнение гармонической бегущей Колебания волны и волны Физика. Закон Архимеда
Физика. Закон Архимеда Проект «Лампы будущего – светодиоды»
Проект «Лампы будущего – светодиоды» Изучение последовательного соединения проводников
Изучение последовательного соединения проводников Презентация по физике "Дисперсия света физика" - скачать
Презентация по физике "Дисперсия света физика" - скачать  Строение атома
Строение атома Формула выталкивающей силы
Формула выталкивающей силы Методы анализа элементного состава материалов
Методы анализа элементного состава материалов Динамика материальной точки. Масса и импульс. Законы Ньютона
Динамика материальной точки. Масса и импульс. Законы Ньютона