- Разработка систем аварийной посадки квадрокоптера

Содержание
- 2. Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов вращающихся диагонально в противоположных направлениях. квадрокоптер
- 3. Тактико-технические данные самого популярного квадрокоптера DJI Phantom 3 дальность радиоуправляемого полета и трансляции до 2000 м
- 4. Алгоритм приземления квадрокоптера при потере управляющего сигнала
- 5. Последствия потери управления квадрокоптером падение в воду столкновение с деревом столкновение с ЛЭП падение на человека
- 6. Алгоритм безопасной посадки квадрокоптера при потере управляющего сигнала в случае возможности продолжать автоматический полёт
- 7. Алгоритм безопасной посадки квадрокоптера при потере управляющего сигнала в случае падения
- 8. Основные модели парашютных систем для квадрокоптеров: Главным недостатком всех существующих парашютных систем является отключение двигателей квадрокоптера,
- 9. Структурная схема квадрокоптера
- 10. Таким образом, проектируемая система аварийной посадки квадрокоптера будет состоять из двух взаимосвязанных подсистем: 1) системы распознавания
- 12. Скачать презентацию

Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов вращающихся диагонально в противоположных
Мультикоптер - это летательный аппарат с произвольным количеством несущих винтов вращающихся диагонально в противоположных
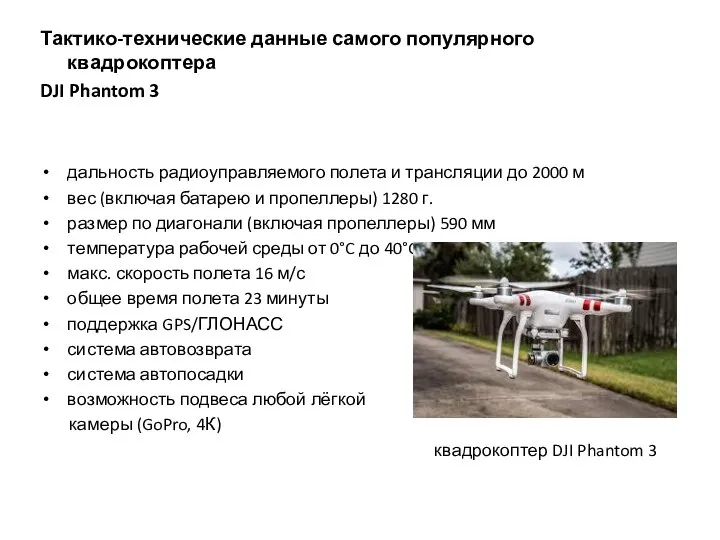
Тактико-технические данные самого популярного квадрокоптера
DJI Phantom 3
дальность радиоуправляемого полета и трансляции до
Тактико-технические данные самого популярного квадрокоптера
DJI Phantom 3
дальность радиоуправляемого полета и трансляции до

Алгоритм приземления квадрокоптера при потере управляющего сигнала
Алгоритм приземления квадрокоптера при потере управляющего сигнала
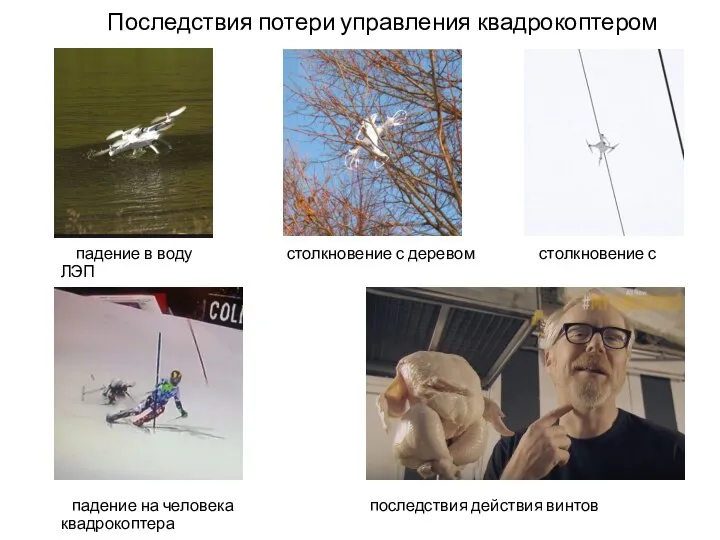
Последствия потери управления квадрокоптером
падение в воду столкновение с деревом столкновение
Последствия потери управления квадрокоптером
падение в воду столкновение с деревом столкновение
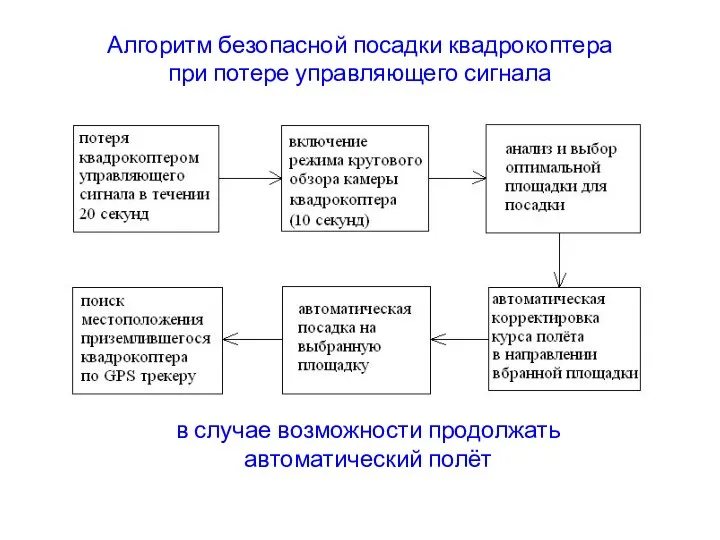
Алгоритм безопасной посадки квадрокоптера
при потере управляющего сигнала
в случае возможности продолжать
Алгоритм безопасной посадки квадрокоптера
при потере управляющего сигнала
в случае возможности продолжать
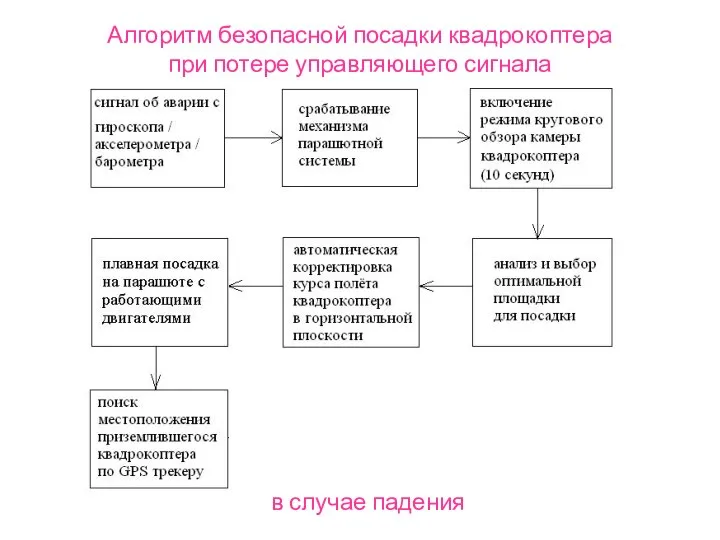
Алгоритм безопасной посадки квадрокоптера
при потере управляющего сигнала
в случае падения
Алгоритм безопасной посадки квадрокоптера
при потере управляющего сигнала
в случае падения
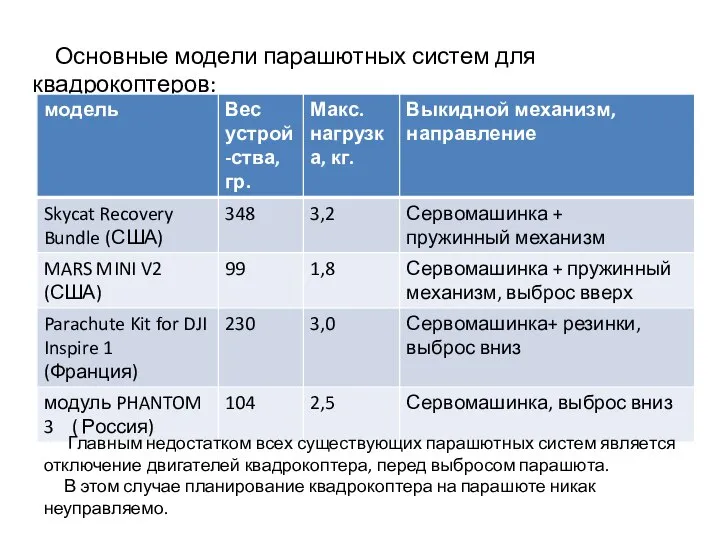
Основные модели парашютных систем для квадрокоптеров:
Главным недостатком всех существующих
Основные модели парашютных систем для квадрокоптеров:
Главным недостатком всех существующих

Структурная схема квадрокоптера
Структурная схема квадрокоптера
Таким образом, проектируемая система аварийной посадки квадрокоптера будет состоять из
Таким образом, проектируемая система аварийной посадки квадрокоптера будет состоять из
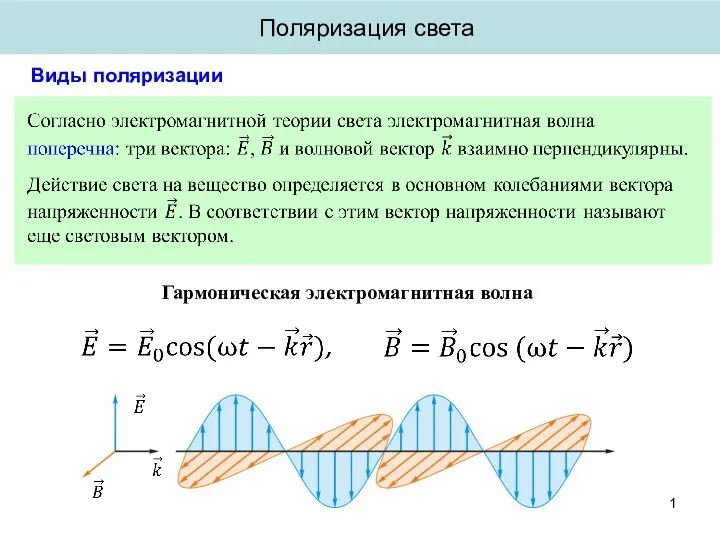 Поляризация света. Виды поляризации
Поляризация света. Виды поляризации Уравнения теории упругости. Напряженное состояние в точке. Гипотеза Сен-Венана. (Лекции 1-2)
Уравнения теории упругости. Напряженное состояние в точке. Гипотеза Сен-Венана. (Лекции 1-2) ОГЭ по физике 2018
ОГЭ по физике 2018 Физика конденсированного состояния
Физика конденсированного состояния Сила тяжести. Вес, невесомость, перегрузки
Сила тяжести. Вес, невесомость, перегрузки Newton’s Laws of Motion
Newton’s Laws of Motion Состав и характеристика атомного ядра
Состав и характеристика атомного ядра Импульс материальной точки
Импульс материальной точки Презентация Электрическое сопротивление человека
Презентация Электрическое сопротивление человека Термиялық өңдеу. Термиялық өңдеудің түрлері. Термиялық өңдеудің фазалық өзгерістері. Болаттын термиялық өңдеу
Термиялық өңдеу. Термиялық өңдеудің түрлері. Термиялық өңдеудің фазалық өзгерістері. Болаттын термиялық өңдеу Проводники и электростатическое поле
Проводники и электростатическое поле Явление электромагнитной индукции. Уравнения Максвелла
Явление электромагнитной индукции. Уравнения Максвелла Система уравнений Максвелла. Основные уравнения электродинамики
Система уравнений Максвелла. Основные уравнения электродинамики Pārejas procesi maiņstrāvas piedziņā
Pārejas procesi maiņstrāvas piedziņā Закон всемирного тяготения
Закон всемирного тяготения Презентация по физике "Історія вивчення атома." - скачать бесплатно
Презентация по физике "Історія вивчення атома." - скачать бесплатно Тема урока Элементарные частицы
Тема урока Элементарные частицы Презентация по физике Применение аккумуляторов
Презентация по физике Применение аккумуляторов Линза. Построение изображения в линзе. Формула тонкой линзы
Линза. Построение изображения в линзе. Формула тонкой линзы Реальные газы и пары. Общие свойства реальных газов
Реальные газы и пары. Общие свойства реальных газов Отклонения формы и расположения поверхностей
Отклонения формы и расположения поверхностей История создания швейной машинки
История создания швейной машинки Петрофизика. Физико-механические свойства горных пород
Петрофизика. Физико-механические свойства горных пород Взаимное притяжение и отталкивание молекул
Взаимное притяжение и отталкивание молекул Наблюдения - основа астрономии
Наблюдения - основа астрономии Распределение молекул по величине энергии
Распределение молекул по величине энергии Презентация по физике Термодинамика
Презентация по физике Термодинамика  Анималистика в металлопластике
Анималистика в металлопластике