- Система с использованием ПИД-регулятора для задачи следования по линии

Содержание
- 2. Робот. В нашей системе собран робот: На двухколёсной платформе микроконтроллер Arduino Uno с платой расширения Motor
- 3. Основы теории управления. УСТРОЙСТВО УПРАВЛЕНИЯ ОБЪЕКТ УПРАВЛЕНИЯ Программа привод датчики Управляющее воздействие Результат управления Информация о
- 4. ПИД-регулятор.
- 5. Видео сравнение
- 6. Решение задачи.
- 7. Выводы: - Изучили литературу по ПИД-регулированию. - Улучшили навыки программирования. - Получили стабильную и скоростную систему.
- 9. Скачать презентацию
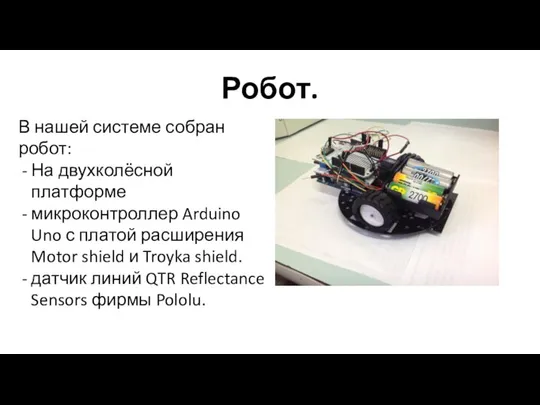
Робот.
В нашей системе собран робот:
На двухколёсной платформе
микроконтроллер Arduino Uno с платой
Робот.
В нашей системе собран робот:
На двухколёсной платформе
микроконтроллер Arduino Uno с платой

Основы теории управления.
УСТРОЙСТВО УПРАВЛЕНИЯ
ОБЪЕКТ УПРАВЛЕНИЯ
Программа
привод
датчики
Управляющее воздействие
Результат управления
Информация о результатах управления ОБРАТНАЯ
Основы теории управления.
УСТРОЙСТВО УПРАВЛЕНИЯ
ОБЪЕКТ УПРАВЛЕНИЯ
Программа
привод
датчики
Управляющее воздействие
Результат управления
Информация о результатах управления ОБРАТНАЯ
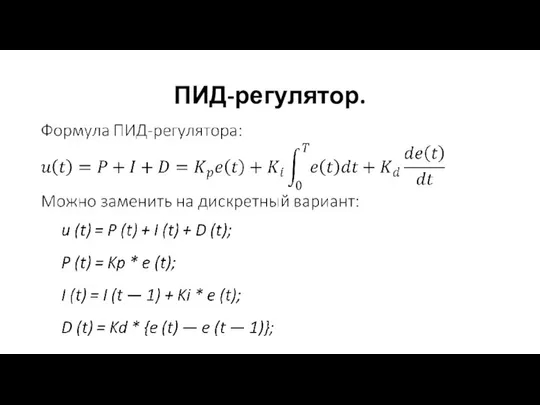
ПИД-регулятор.
ПИД-регулятор.
Видео сравнение
Видео сравнение
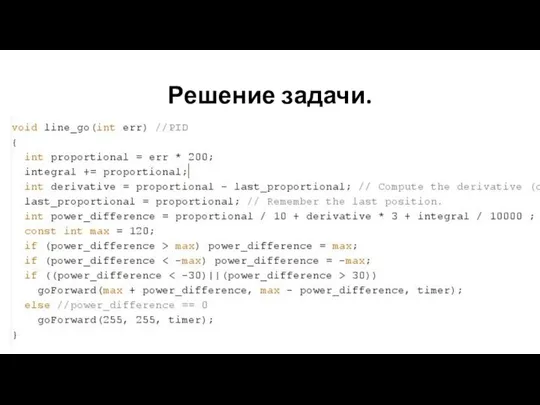
Решение задачи.
Решение задачи.
Выводы:
- Изучили литературу по ПИД-регулированию.
- Улучшили навыки программирования.
- Получили стабильную и
Выводы:
- Изучили литературу по ПИД-регулированию.
- Улучшили навыки программирования.
- Получили стабильную и
 Дисперсия. Интерференция. Дифракция
Дисперсия. Интерференция. Дифракция Розвиток ядерної енергетики в Україні
Розвиток ядерної енергетики в Україні  Дисперсия света
Дисперсия света Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Механические колебания. Физика. 9 класс
Механические колебания. Физика. 9 класс Секреты электроизмерительной лаборатории
Секреты электроизмерительной лаборатории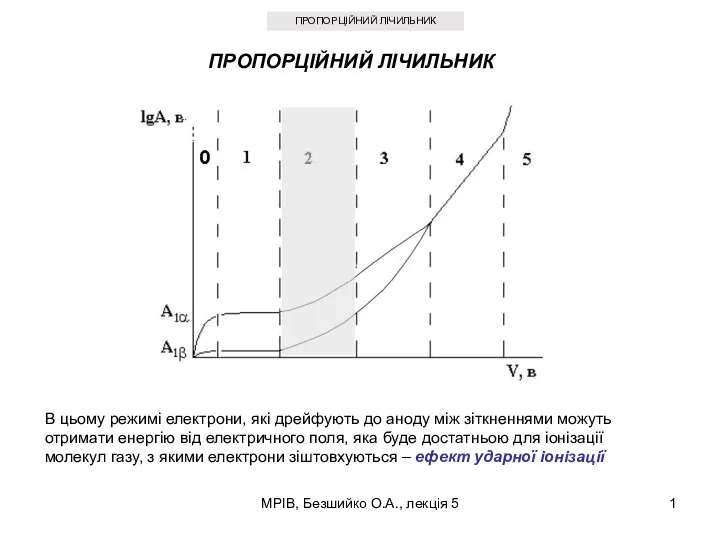 Пропорційний лічильник
Пропорційний лічильник Проект Как сохранить климат с помощью простых энергетических решений
Проект Как сохранить климат с помощью простых энергетических решений Методы математического моделирования ЭС. Прогнозирование электропотребления. Оптимизация краткосрочных и оперативных режимов
Методы математического моделирования ЭС. Прогнозирование электропотребления. Оптимизация краткосрочных и оперативных режимов Относительность движения
Относительность движения Презентация Радиосвязь
Презентация Радиосвязь  Презентация Напряженность электрического поля. Принцип суперпозиции электрических полей
Презентация Напряженность электрического поля. Принцип суперпозиции электрических полей 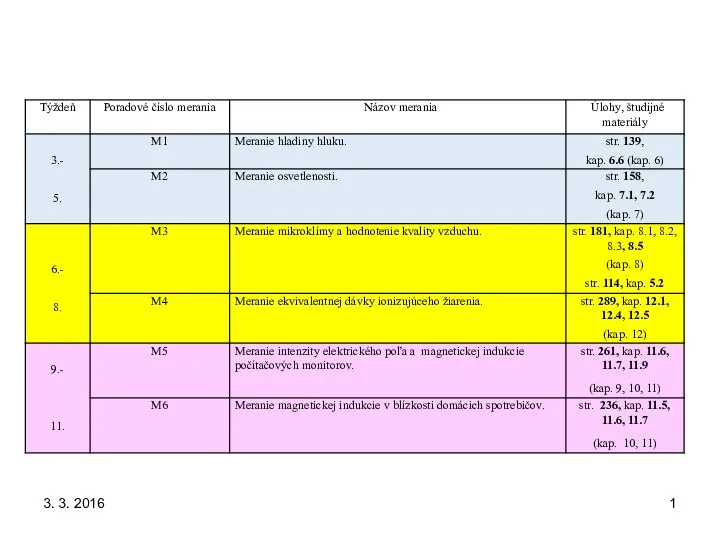 Meranie a hodnotenie hladiny hluku
Meranie a hodnotenie hladiny hluku Ручные машины (механизированные инструменты)
Ручные машины (механизированные инструменты) Перемещение при равноускоренном движении Урок в 9 классе Учебник :Пёрышкин А.В. Гутник Е.М. Учитель: Кононова Е.Ю.
Перемещение при равноускоренном движении Урок в 9 классе Учебник :Пёрышкин А.В. Гутник Е.М. Учитель: Кононова Е.Ю. Задачи на сопротивление
Задачи на сопротивление Электрический ток в вакууме
Электрический ток в вакууме Турбулентное течение
Турбулентное течение Презентация по физике "Уравнение состояния идеального газа" - скачать
Презентация по физике "Уравнение состояния идеального газа" - скачать  Презентация Сейсмограф Физика 9 класс
Презентация Сейсмограф Физика 9 класс  Электричесие явления (10 класс)
Электричесие явления (10 класс) Философские проблемы науки и техники. Типы рациональности. Неклассическая рациональность. (Лекция 9.2)
Философские проблемы науки и техники. Типы рациональности. Неклассическая рациональность. (Лекция 9.2) Ядерная физика
Ядерная физика Зеркальные антенны. Лекция №18. АФУ
Зеркальные антенны. Лекция №18. АФУ Лекции по электроприводу. Экзамен по дисциплинам «Электропривод»
Лекции по электроприводу. Экзамен по дисциплинам «Электропривод» Действие магнитного поля на проводник с током и движущиеся заряды
Действие магнитного поля на проводник с током и движущиеся заряды Биофизика дыхания. Объемы и емкости легких
Биофизика дыхания. Объемы и емкости легких Знатоки физики. 9 класс
Знатоки физики. 9 класс