- Тема 4. Математические модели вертолета как объекта управления

Содержание
- 2. Прод. маятниковое движение Полное продольное движение Полное боковое движение Полное движение НВ Поступат. движение по висоте
- 3. ЛИНЕЙНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ВЕРТОЛЕТА ОХ ОY ОZ ОХ ОY ОZ
- 4. Без учета возмущений и динамики НВ уравнения ПМД : Уравнениям (4.4) соответствует структурная схема, изображенная на
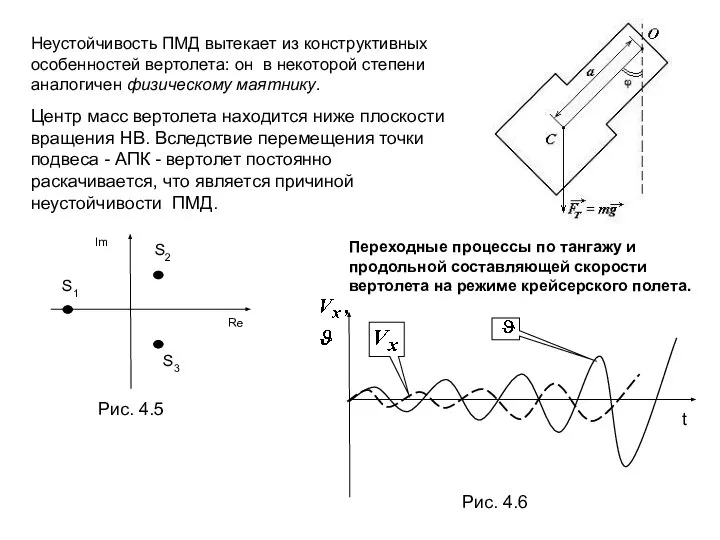
- 5. Переходные процессы по тангажу и продольной составляющей скорости вертолета на режиме крейсерского полета. Неустойчивость ПМД вытекает
- 6. Запишем ПФ вертолета по тангажу и продольный составляющей скорости: (4.7) (4.6) На режиме «висение» при :
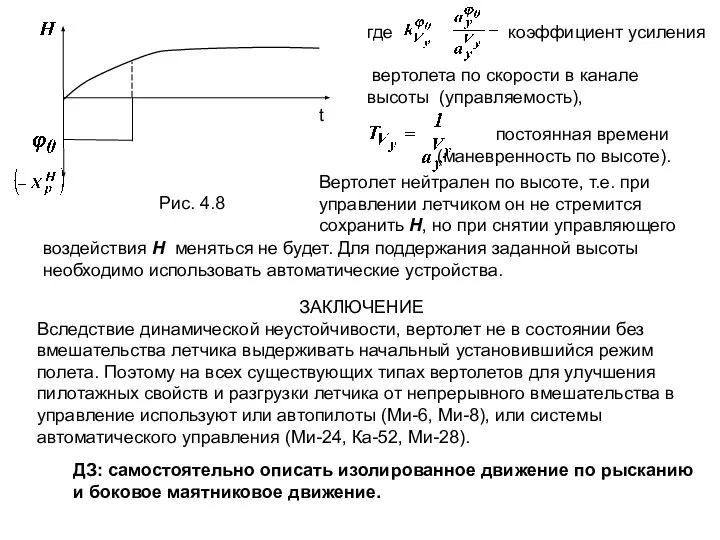
- 7. Математические условия выделения движения по высоте из уравнений продольного движения имеют вид: Изолированное движение вертолета по
- 8. ЗАКЛЮЧЕНИЕ Вследствие динамической неустойчивости, вертолет не в состоянии без вмешательства летчика выдерживать начальный установившийся режим полета.
- 9. 4.7. Автопилотное контуры САУ-В Рассмотрим реализацию работы САУ в путевом канале управления вертолетом на режиме «Ст.
- 10. (4.17) (4.18) курс вертолета в момент включения режима; курс вертолета, изменяется поворотом ручки центровки на ПУ-Н
- 11. Совмещенное управление в режиме "Ст. " Вертолет пилотируется летчиком при включенном режиме стабилизации. Шаг рулевого винта
- 12. (4.20) При нажатии летчиком на педали с помощью кнопок на подпедальниках стабилизация курса отключается. В противном
- 13. Переходные процессы в режиме “ Ст. “ Включен режим “ Ст. “ Величина ошибки ( )
- 14. Рассмотрим особенности формирования составляющей . Полярность сигнала выбрана так, что перемещение выходного штока бустера в КАУ-К
- 16. Скачать презентацию

Прод. маятниковое движение
Полное продольное движение
Полное боковое движение
Полное
движение НВ
Поступат. движение
по висоте
ОХ
ОZ
ОY
Движение
по
рысканию
ОY
Поступательное
Прод. маятниковое движение
Полное продольное движение
Полное боковое движение
Полное
движение НВ
Поступат. движение
по висоте
ОХ
ОZ
ОY
Движение
по
рысканию
ОY
Поступательное

ЛИНЕЙНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ВЕРТОЛЕТА
ОХ
ОY
ОZ
ОХ
ОY
ОZ
ЛИНЕЙНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ВЕРТОЛЕТА
ОХ
ОY
ОZ
ОХ
ОY
ОZ
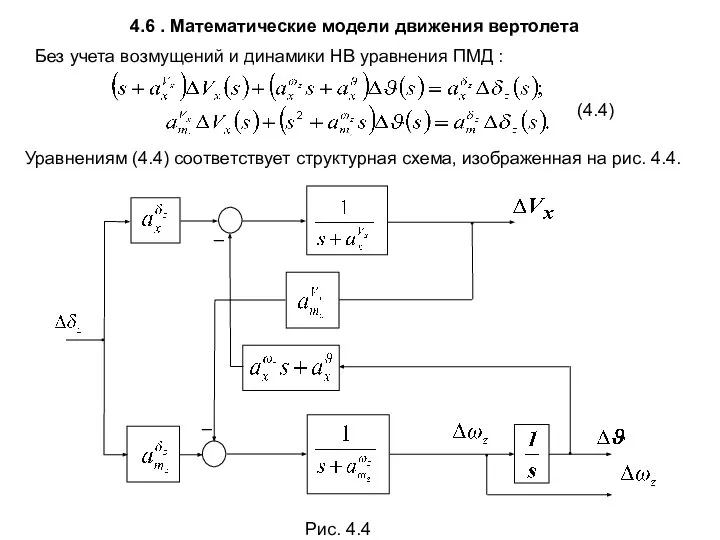
Без учета возмущений и динамики НВ уравнения ПМД :
Уравнениям (4.4) соответствует
Без учета возмущений и динамики НВ уравнения ПМД :
Уравнениям (4.4) соответствует
Переходные процессы по тангажу и продольной составляющей скорости вертолета на режиме
Переходные процессы по тангажу и продольной составляющей скорости вертолета на режиме
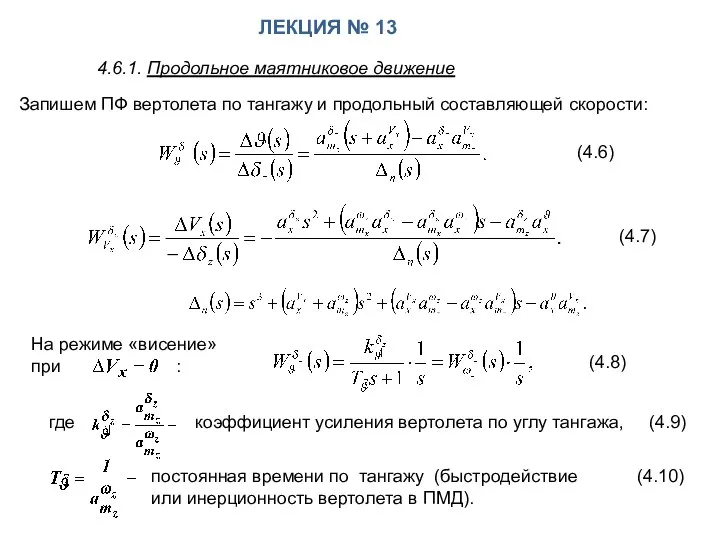
Запишем ПФ вертолета по тангажу и продольный составляющей скорости:
(4.7)
(4.6)
На режиме «висение»
при
Запишем ПФ вертолета по тангажу и продольный составляющей скорости:
(4.7)
(4.6)
На режиме «висение»
при
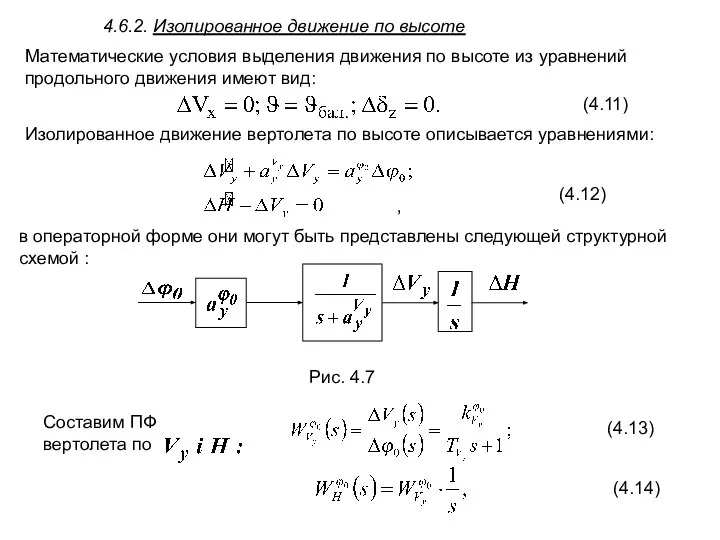
Математические условия выделения движения по высоте из уравнений продольного движения имеют
Математические условия выделения движения по высоте из уравнений продольного движения имеют
ЗАКЛЮЧЕНИЕ
Вследствие динамической неустойчивости, вертолет не в состоянии без вмешательства летчика выдерживать
ЗАКЛЮЧЕНИЕ
Вследствие динамической неустойчивости, вертолет не в состоянии без вмешательства летчика выдерживать

4.7. Автопилотное контуры САУ-В
Рассмотрим реализацию работы САУ в путевом канале управления
4.7. Автопилотное контуры САУ-В
Рассмотрим реализацию работы САУ в путевом канале управления
(4.17)
(4.18)
курс вертолета в момент включения режима;
курс вертолета, изменяется поворотом ручки центровки
(4.17)
(4.18)
курс вертолета в момент включения режима;
курс вертолета, изменяется поворотом ручки центровки

Совмещенное управление в режиме "Ст. "
Вертолет пилотируется летчиком при включенном режиме
Совмещенное управление в режиме "Ст. "
Вертолет пилотируется летчиком при включенном режиме
(4.20)
При нажатии летчиком на педали с помощью кнопок на подпедальниках стабилизация
(4.20)
При нажатии летчиком на педали с помощью кнопок на подпедальниках стабилизация
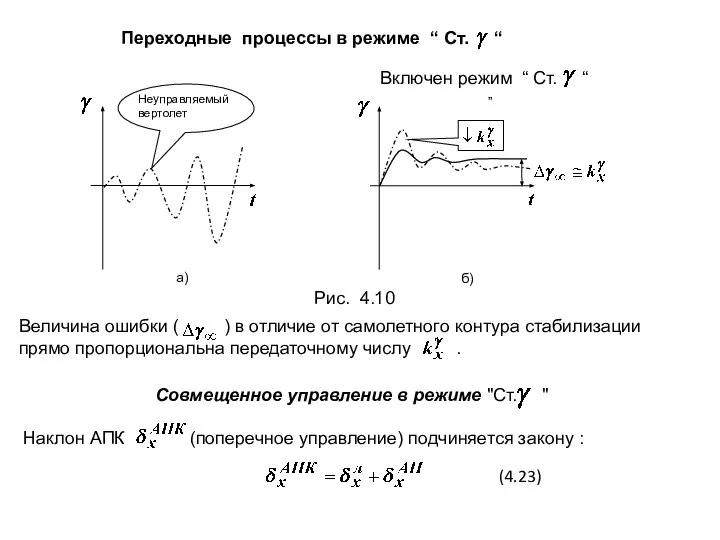
Переходные процессы в режиме “ Ст. “
Включен режим “ Ст. “
Переходные процессы в режиме “ Ст. “
Включен режим “ Ст. “
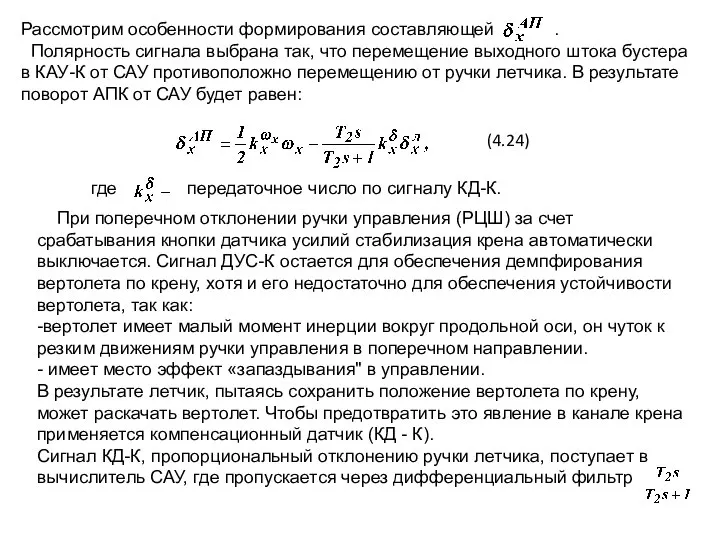
Рассмотрим особенности формирования составляющей .
Полярность сигнала выбрана так, что перемещение
Рассмотрим особенности формирования составляющей .
Полярность сигнала выбрана так, что перемещение
 Электролиз. Использование электролиза
Электролиз. Использование электролиза Явление электромагнитной индукции
Явление электромагнитной индукции Единицы силы. Связь между силой тяжести и массой тела
Единицы силы. Связь между силой тяжести и массой тела Изотопная геология (введение)
Изотопная геология (введение) Линзы. Оптическая сила линзы Учитель физики МОУ Будинская ООШ Бабаева Валентина Васильевна.
Линзы. Оптическая сила линзы Учитель физики МОУ Будинская ООШ Бабаева Валентина Васильевна. Automaty a regularní výrazy. (Lekce 3)
Automaty a regularní výrazy. (Lekce 3) Кристаллооптический анализ
Кристаллооптический анализ Магнитное поле
Магнитное поле Розвиток судного та повітряного плавання. Дослід Торрічеллі
Розвиток судного та повітряного плавання. Дослід Торрічеллі Применение аккумуляторов
Применение аккумуляторов Электрондық парамагнитті резонанс (ЭПР) әдісі
Электрондық парамагнитті резонанс (ЭПР) әдісі Открытие протона и нейтрона
Открытие протона и нейтрона Закон преломления света
Закон преломления света Электромагнитная индукция. Закон Фарадея. Правило Ленца. Самоиндукция
Электромагнитная индукция. Закон Фарадея. Правило Ленца. Самоиндукция Первое начало термодинамики
Первое начало термодинамики Система електроживлення, вентиляції, кондиціювання та обігріву. Загальні відомості про систему електроживлення 17Х6. (Тема 9.1)
Система електроживлення, вентиляції, кондиціювання та обігріву. Загальні відомості про систему електроживлення 17Х6. (Тема 9.1) Электрические явления
Электрические явления Водяное охлаждение. Сфера применения
Водяное охлаждение. Сфера применения Философские проблемы науки и техники. Философские основания физики. (Лекция 10)
Философские проблемы науки и техники. Философские основания физики. (Лекция 10) Презентация по физике "Оптика" - скачать
Презентация по физике "Оптика" - скачать  Квантовая радиофизика. Лекция 5. Практическая ЯМР- спектроскопия
Квантовая радиофизика. Лекция 5. Практическая ЯМР- спектроскопия Основные уравнения классической динамики
Основные уравнения классической динамики Малая Распределенная Генерация в России и Мире. Решения для промышленности, ЖКХ и прочих потребителей.
Малая Распределенная Генерация в России и Мире. Решения для промышленности, ЖКХ и прочих потребителей.  Определение расстояния до недоступной точки
Определение расстояния до недоступной точки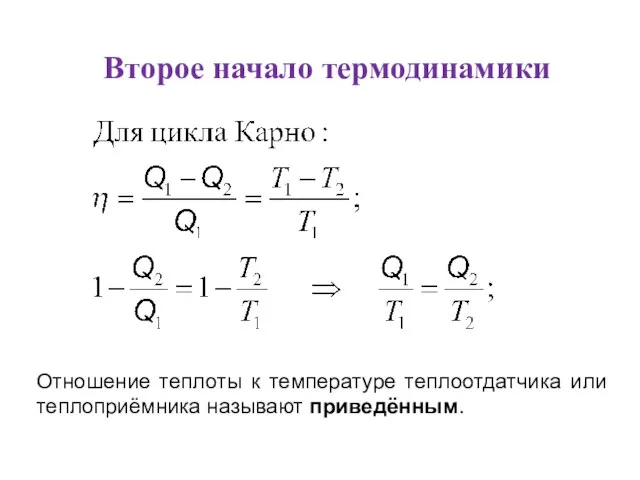 Второй закон термодинамики
Второй закон термодинамики Оптика 8 класс
Оптика 8 класс Модификация модели сечения выведения для различных спектров. Модификация модели сечения выведения для неводородосодержащих сред
Модификация модели сечения выведения для различных спектров. Модификация модели сечения выведения для неводородосодержащих сред История изобретения паровых машин. Работу выполнила ученица 8б класса МКОУ СОШ пгт Подосиновец Пунченко Анастасия
История изобретения паровых машин. Работу выполнила ученица 8б класса МКОУ СОШ пгт Подосиновец Пунченко Анастасия