- Automaty a regularní výrazy. (Lekce 3)

Содержание
- 2. Bod1: Navrhněte automat, jehož výstup Y bude signalizovat "1" (logickou jedničkou), že vstup A přešel do
- 3. Bod2: Analýza zadání Návrh vždy začínáme vždy podrobnou analýzou zadání. Jaké možné varianty připouští slovní formulace?
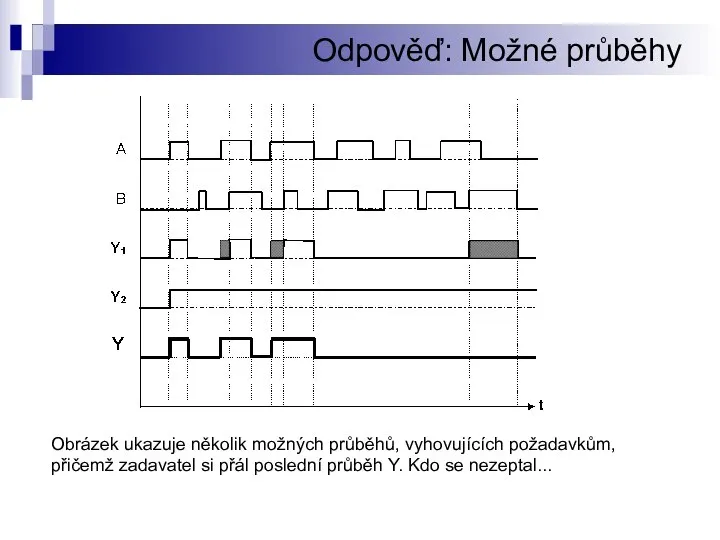
- 4. Odpověď: Možné průběhy Obrázek ukazuje několik možných průběhů, vyhovujících požadavkům, přičemž zadavatel si přál poslední průběh
- 5. Bod 3: Vyjádření chování automatu v orientovaném grafu.
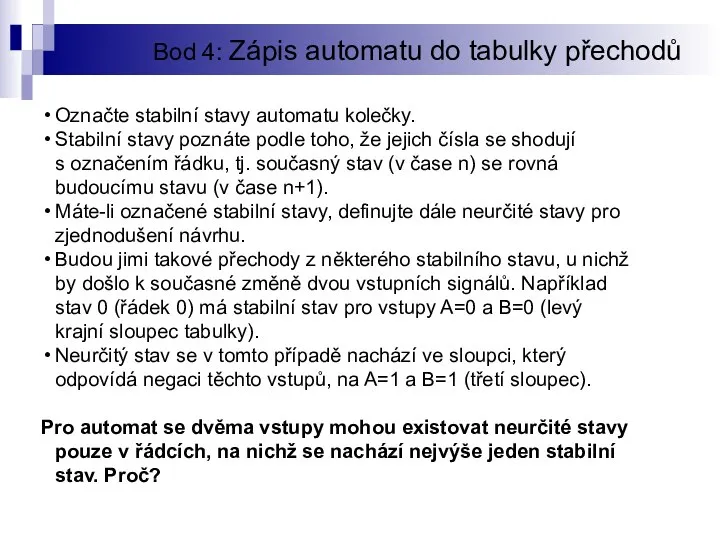
- 6. Bod 4: Zápis automatu do tabulky přechodů Označte stabilní stavy automatu kolečky. Stabilní stavy poznáte podle
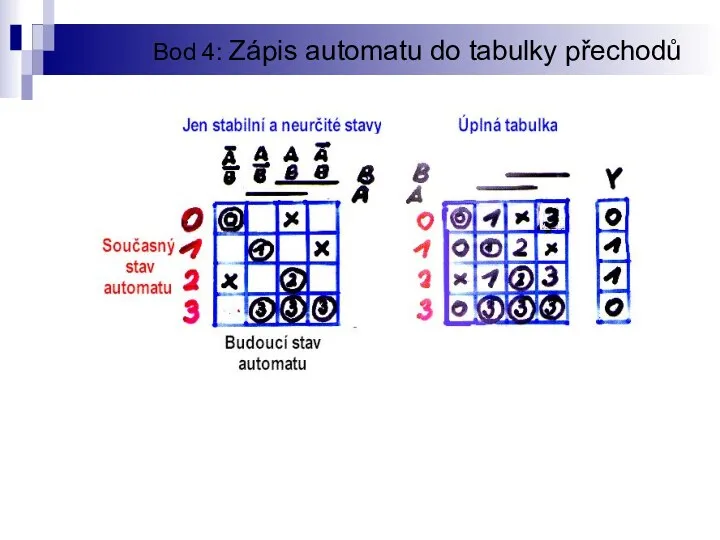
- 7. Bod 4: Zápis automatu do tabulky přechodů
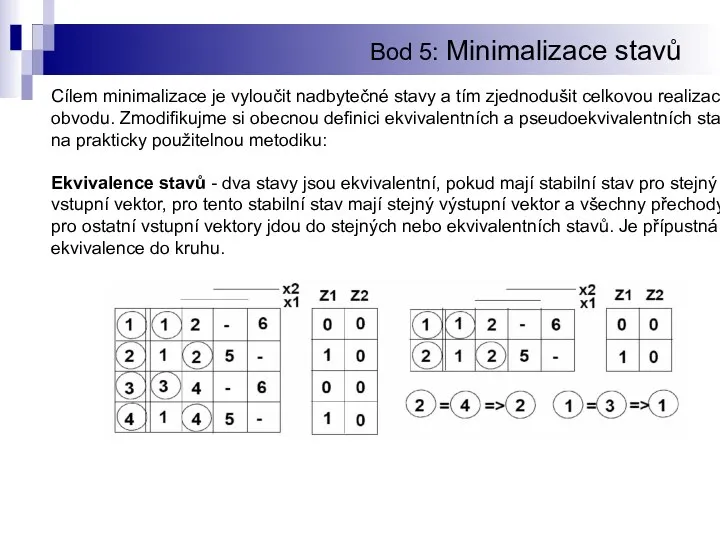
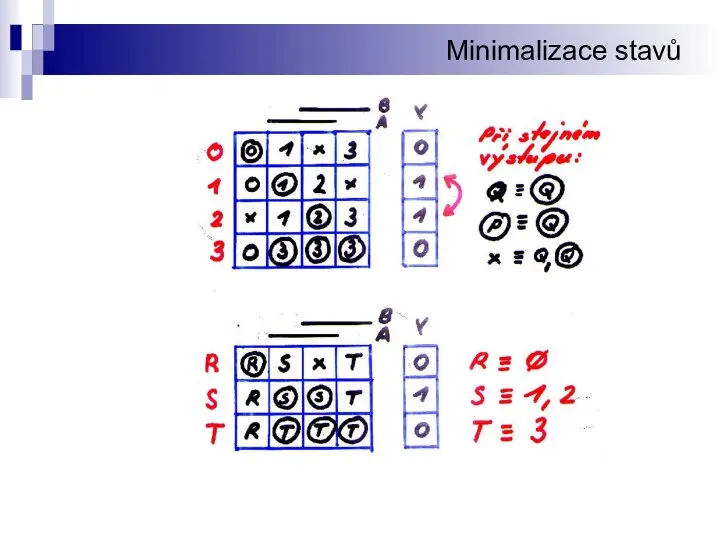
- 8. Bod 5: Minimalizace stavů Cílem minimalizace je vyloučit nadbytečné stavy a tím zjednodušit celkovou realizaci obvodu.
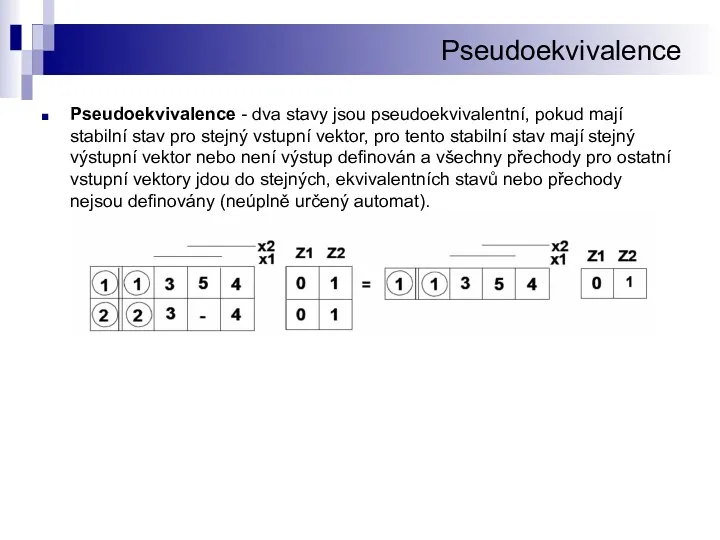
- 9. Pseudoekvivalence Pseudoekvivalence - dva stavy jsou pseudoekvivalentní, pokud mají stabilní stav pro stejný vstupní vektor, pro
- 10. Minimalizace stavů
- 11. Bod 6: Kódování stavů Další postup závisí na typu návrhu. Pokud navrhujeme synchronní automat pomocí synchronních
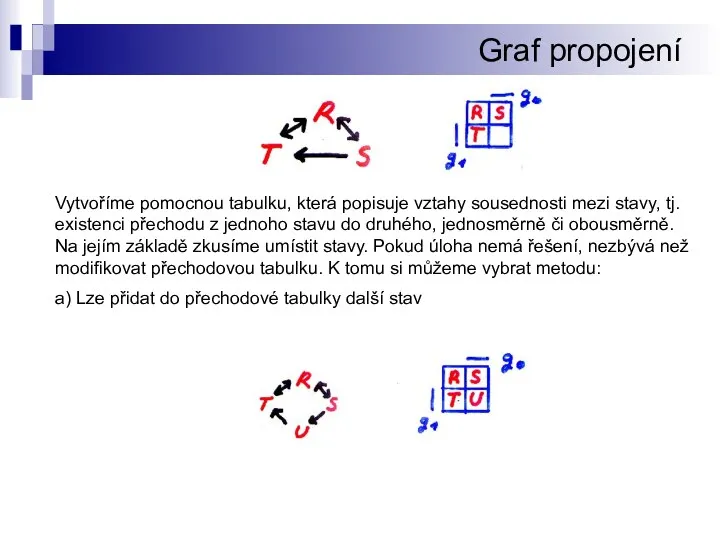
- 12. Graf propojení Vytvoříme pomocnou tabulku, která popisuje vztahy sousednosti mezi stavy, tj. existenci přechodu z jednoho
- 13. Změna tabulky b) Lze přecházet před jiný stav, využít již existujícího skoku anebo dodefinovat neurčitý stav
- 14. Bod 7: Zakódování tabulky
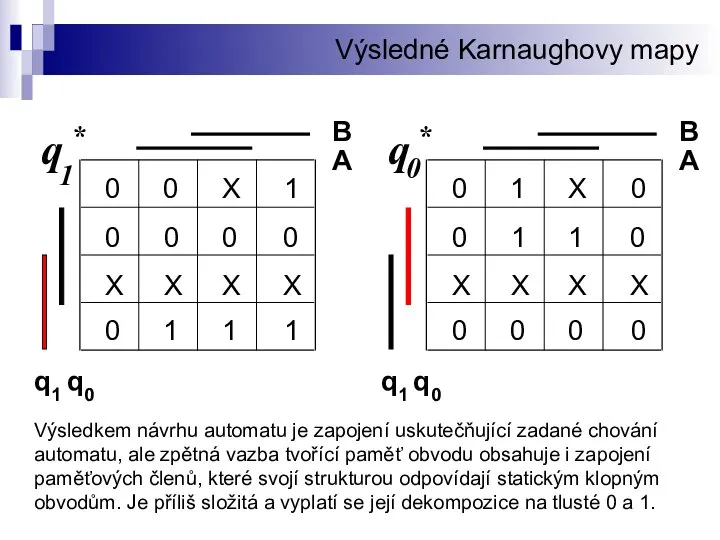
- 15. B A q1 q0 0 1 X 0 0 1 1 0 X X X X
- 16. Univerzální tvar této mapy získáme tím, že si v mapěoznačíme některé významné přechody, které nás při
- 17. Tlusté 1 a 0 pro JK
- 18. Tlusté 1 a 0 pro RS
- 19. Tlusté 1 a 0 pro nonRS
- 20. Bod9: Vyznačíme tlusté 1 a 0: S1' B A q1 q 0 0 0 X 1
- 21. R1' B A q1 q 0 0 0 X 1 0 0 0 0 X X
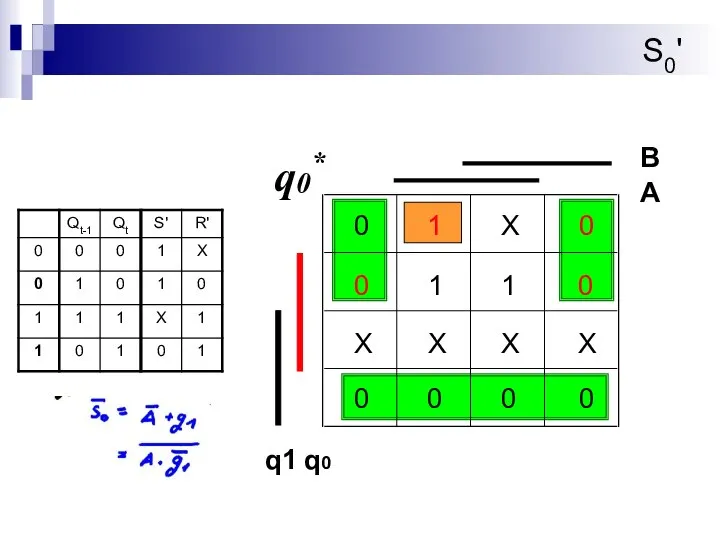
- 22. S0' B A q1 q 0 0 1 X 0 0 1 1 0 X X
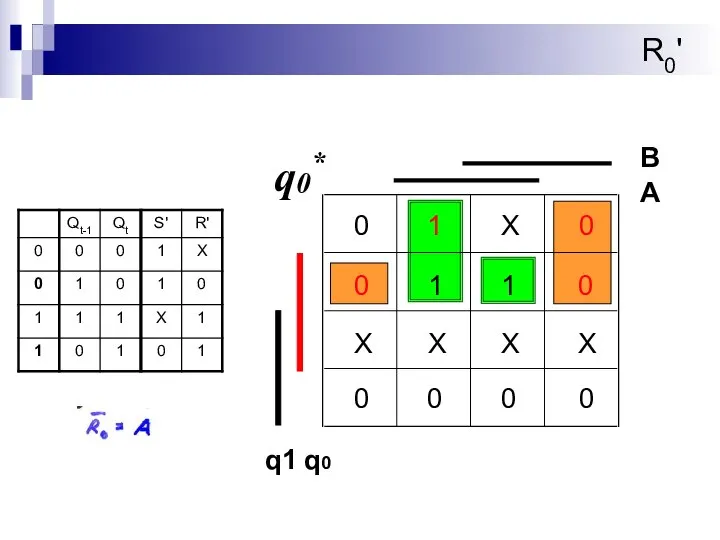
- 23. R0' B A q1 q 0 0 1 X 0 0 1 1 0 X X
- 25. Скачать презентацию
Bod1: Navrhněte automat, jehož výstup Y bude signalizovat "1" (logickou jedničkou),
Bod1: Navrhněte automat, jehož výstup Y bude signalizovat "1" (logickou jedničkou),
Bod2: Analýza zadání
Návrh vždy začínáme vždy podrobnou analýzou zadání. Jaké možné
Bod2: Analýza zadání
Návrh vždy začínáme vždy podrobnou analýzou zadání. Jaké možné
Odpověď: Možné průběhy
Obrázek ukazuje několik možných průběhů, vyhovujících požadavkům, přičemž zadavatel
Odpověď: Možné průběhy
Obrázek ukazuje několik možných průběhů, vyhovujících požadavkům, přičemž zadavatel
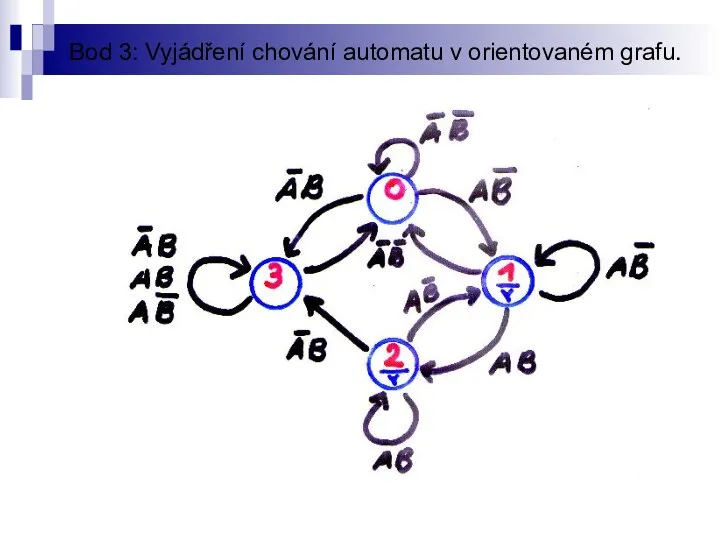
Bod 3: Vyjádření chování automatu v orientovaném grafu.
Bod 3: Vyjádření chování automatu v orientovaném grafu.
Bod 4: Zápis automatu do tabulky přechodů
Označte stabilní stavy automatu
Bod 4: Zápis automatu do tabulky přechodů
Označte stabilní stavy automatu
Bod 4: Zápis automatu do tabulky přechodů
Bod 4: Zápis automatu do tabulky přechodů
Bod 5: Minimalizace stavů
Cílem minimalizace je vyloučit nadbytečné stavy a
Bod 5: Minimalizace stavů
Cílem minimalizace je vyloučit nadbytečné stavy a
Pseudoekvivalence
Pseudoekvivalence - dva stavy jsou pseudoekvivalentní, pokud mají stabilní stav pro
Pseudoekvivalence
Pseudoekvivalence - dva stavy jsou pseudoekvivalentní, pokud mají stabilní stav pro
Minimalizace stavů
Minimalizace stavů
Bod 6: Kódování stavů
Další postup závisí na typu návrhu.
Pokud
Bod 6: Kódování stavů
Další postup závisí na typu návrhu.
Pokud
Graf propojení
Vytvoříme pomocnou tabulku, která popisuje vztahy sousednosti mezi stavy, tj.
Graf propojení
Vytvoříme pomocnou tabulku, která popisuje vztahy sousednosti mezi stavy, tj.
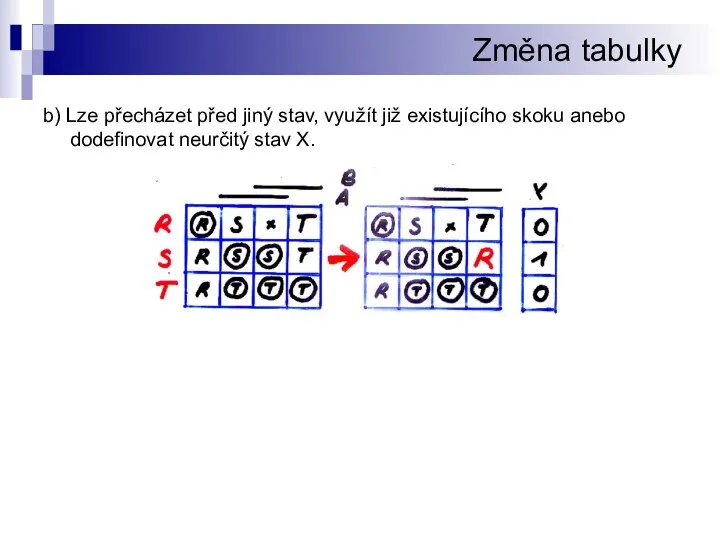
Změna tabulky
b) Lze přecházet před jiný stav, využít již existujícího skoku
Změna tabulky
b) Lze přecházet před jiný stav, využít již existujícího skoku
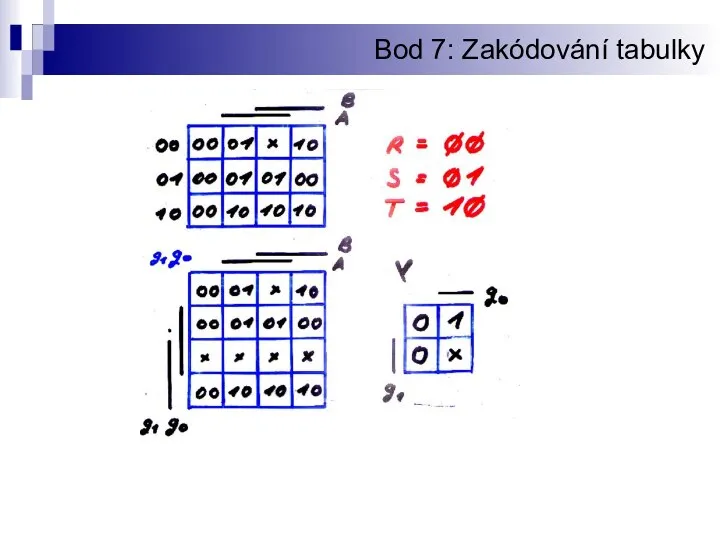
Bod 7: Zakódování tabulky
Bod 7: Zakódování tabulky
B
A
q1 q0
0
1
X
0
0
1
1
0
X
X
X
X
0
0
0
0
q
0
*
B
A
q1 q0
0
1
X
0
0
1
1
0
X
X
X
X
0
0
0
0
q
0
*
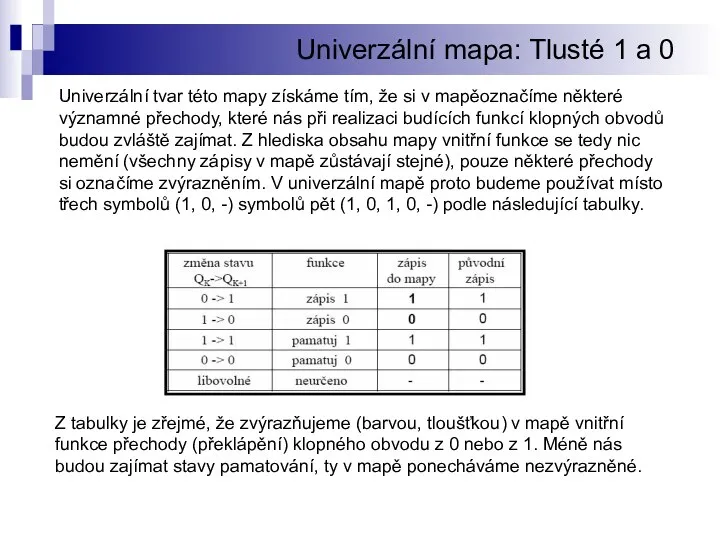
Univerzální tvar této mapy získáme tím, že si v mapěoznačíme některé
Univerzální tvar této mapy získáme tím, že si v mapěoznačíme některé
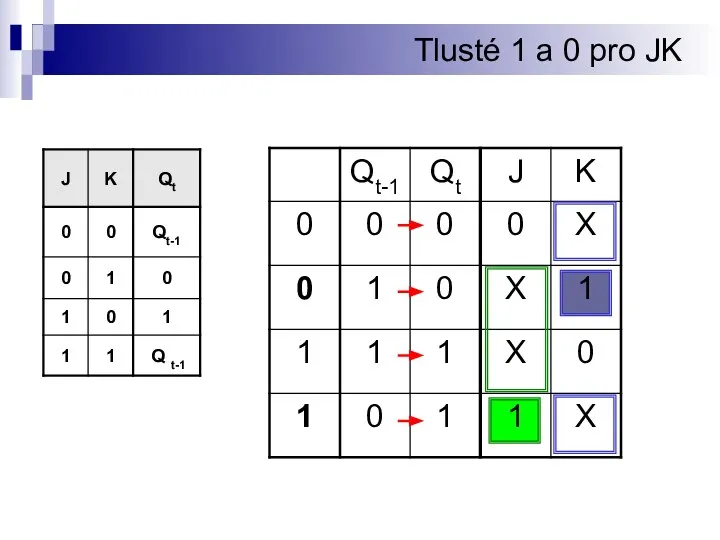
Tlusté 1 a 0 pro JK
Tlusté 1 a 0 pro JK
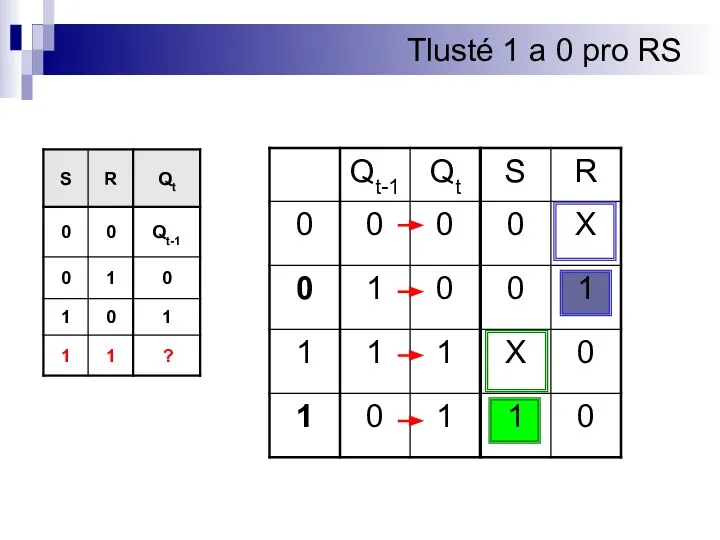
Tlusté 1 a 0 pro RS
Tlusté 1 a 0 pro RS
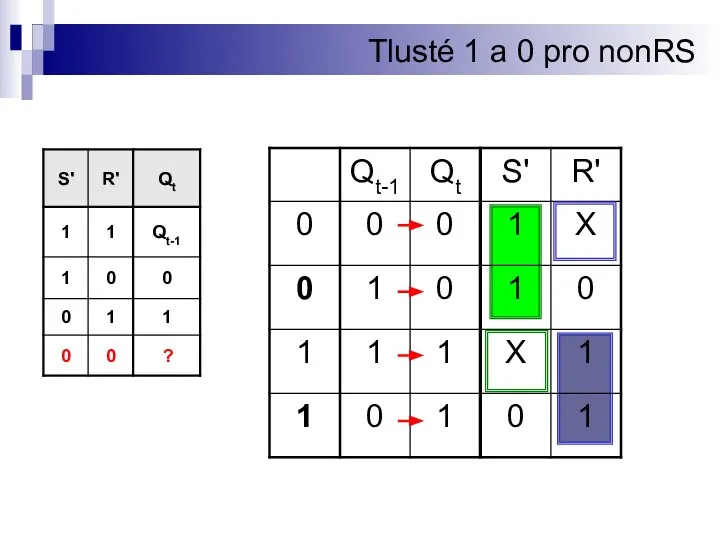
Tlusté 1 a 0 pro nonRS
Tlusté 1 a 0 pro nonRS
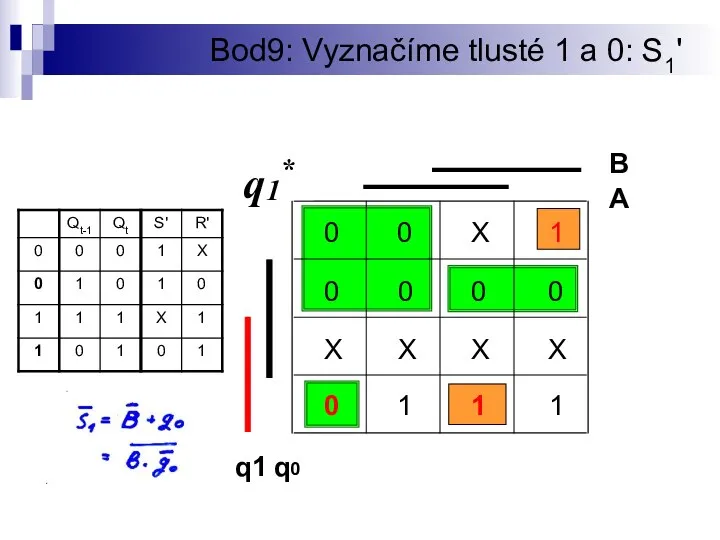
Bod9: Vyznačíme tlusté 1 a 0: S1'
B
A
Bod9: Vyznačíme tlusté 1 a 0: S1'
B
A
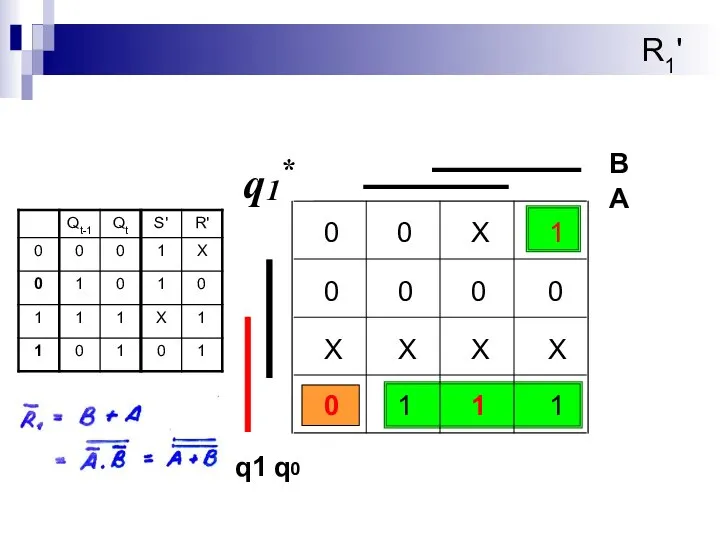
R1'
B
A
q1
q
0
0
0
X
1
0
0
0
0
X
X
X
X
0
1
1
1
q
1
*
R1'
B
A
q1
q
0
0
0
X
1
0
0
0
0
X
X
X
X
0
1
1
1
q
1
*
S0'
B
A
q1
q
0
0
1
X
0
0
1
1
0
X
X
X
X
0
0
0
0
q
0
*
S0'
B
A
q1
q
0
0
1
X
0
0
1
1
0
X
X
X
X
0
0
0
0
q
0
*
R0'
B
A
q1
q
0
0
1
X
0
0
1
1
0
X
X
X
X
0
0
0
0
q
0
*
R0'
B
A
q1
q
0
0
1
X
0
0
1
1
0
X
X
X
X
0
0
0
0
q
0
*
 Детерминированность и хаос. Характеристики хаотического движения. Определение странных аттракторов
Детерминированность и хаос. Характеристики хаотического движения. Определение странных аттракторов Задачи на скорость.
Задачи на скорость.  Единая физическая картина мира. 11 класс
Единая физическая картина мира. 11 класс ПВИ. Сенсорные процессы. Ощущения равновесия и ориентации в пространстве
ПВИ. Сенсорные процессы. Ощущения равновесия и ориентации в пространстве Презентация по физике "Электризация тел. 8-й класс" - скачать
Презентация по физике "Электризация тел. 8-й класс" - скачать 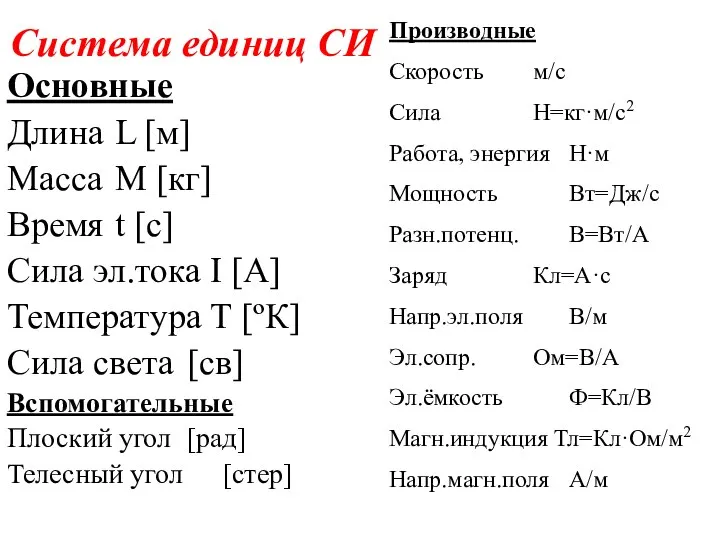 Система единиц СИ
Система единиц СИ Электрическое поле. Напряжённость электрического поля
Электрическое поле. Напряжённость электрического поля Клепка прессованием и ударом
Клепка прессованием и ударом Презентация по физике "Радиоактивность 9 класс" - скачать
Презентация по физике "Радиоактивность 9 класс" - скачать  Радиационный фон школьных помещений (ГБОУ школа №430
Радиационный фон школьных помещений (ГБОУ школа №430  Законы сохранения
Законы сохранения Электричесие явления (10 класс)
Электричесие явления (10 класс) Теория компульсивных циклов
Теория компульсивных циклов Основы термодинамики
Основы термодинамики Ускоренное движение
Ускоренное движение Система с использованием ПИД-регулятора для задачи следования по линии
Система с использованием ПИД-регулятора для задачи следования по линии Физика в нашей жизни
Физика в нашей жизни Уравнение движения системы с переменной массой
Уравнение движения системы с переменной массой Презентация Электромагнитное поле
Презентация Электромагнитное поле Закон всемирного тяготения
Закон всемирного тяготения Аттестационная работа. Образовательная программа элективного курса Исследовательские работы при изучении курса физики 7 класс
Аттестационная работа. Образовательная программа элективного курса Исследовательские работы при изучении курса физики 7 класс В мире звука МОУ «Средняя общеобразовательная школа №3» Выполнила ученица 9 «А» класса Лапкина Ирина. Балахна 2009 год
В мире звука МОУ «Средняя общеобразовательная школа №3» Выполнила ученица 9 «А» класса Лапкина Ирина. Балахна 2009 год Броуновское движение. Диффузия в жидкостях, газах и твердых телах
Броуновское движение. Диффузия в жидкостях, газах и твердых телах Виды излучений
Виды излучений Системы противообледенения
Системы противообледенения Нанотехнологии в решении экологических проблем
Нанотехнологии в решении экологических проблем Проекция силы на ось
Проекция силы на ось Микроволновка и все о ней
Микроволновка и все о ней