- Теория Автоматического Управления

Содержание
- 2. Теория автоматического управления Основные понятия и определения Теория автоматического управления – наука, изучающая: принципы построения систем
- 3. Теория автоматического управления Основные понятия и определения Теория автоматического управления базируется на таких понятиях, как система
- 4. Автоматика – наука об общих принципах и методах построения автоматически действующих устройств и систем. Автоматическое управление
- 5. Под объектом автоматического управления понимают машину или установку, требуемый режим работы которой поддерживается устройством управления. Общие
- 6. К входным параметрам относят физические величины характеризирующие сырье и энергетические потоки. - Контролируемые (управляющие воздействия) -
- 7. Основные определения и понятия Автоматическое управление – управление без участия человека (чем проще объект управления, тем
- 8. Основные определения и понятия (устройство управления) (объект управления) V(t) – вектор управляющего воздействия Y(t) – вектор
- 9. В зависимости от степени участия оператора в процессе управления различают следующие режимы: В зависимости от места
- 10. Задающее воздействие уз в соответствии с определённым законом определяет требуемое значение управляемой величины у, характеризующей работу
- 11. Закон управления представляет собой математическую зависимость, в соответствии с которой формируется управляющее воздействие уу. В общем
- 12. Ручное управление Порядок действий: 1. определение температуры воды; 2. принятие решения и при необходимости его реализация
- 13. Управление с участием человека (чем сложнее объект управления, тем сложнее полностью исключить человека из процесса управления).
- 14. 1.Стабилизация параметров непрерывных технологических процессов, таких как давление, температура, уровень, расход и т.д. Пример: в быту
- 15. Магистральная линия развития НТП
- 16. Алгоритм функционирования САУ показывает, как должна изменяться управляемая (регулируемая) величина по требованиям технологии, экономики или по
- 17. Системы Автоматического Управления Классификация САУ 1) По принципу регулирования а) разомкнутые б) регулирование по возмущению в)
- 18. Системы Автоматического Управления Классификация САУ 2) По характеру задающего воздействия а) системы стабилизации б)системы программного управления
- 19. Системы Автоматического Управления Классификация САУ 3) По характеру сигнала а)непрерывного действия б)дискретного действия 4) По виду
- 20. 6. По числу управляемых величин: – САУ одноканальные (с одной управляемой величиной); – САУ многоканальные (с
- 21. В настоящее время в технике известны и используются три принципа управления (регулирования): принцип разомкнутого управления (регулирования);
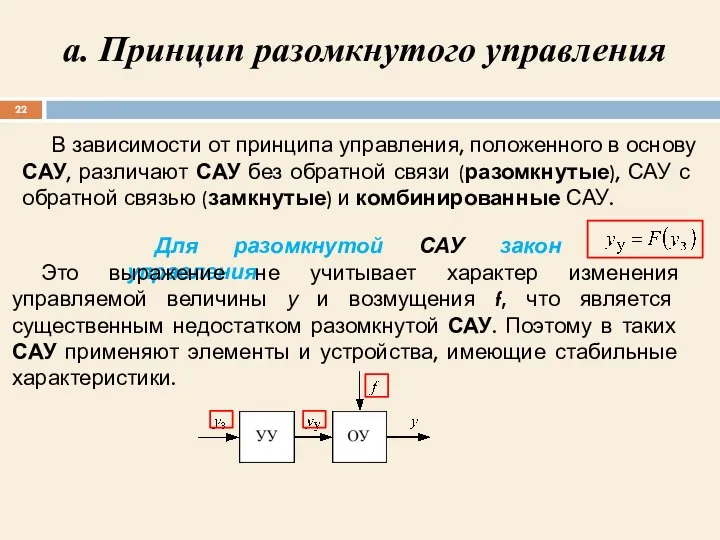
- 22. а. Принцип разомкнутого управления В зависимости от принципа управления, положенного в основу САУ, различают САУ без
- 23. а. Принцип разомкнутого управления Алгоритм управления вырабатывается только на основе заданного алгоритма функционирования и не контролируется
- 24. Функциональная схема разомкнутой САУ
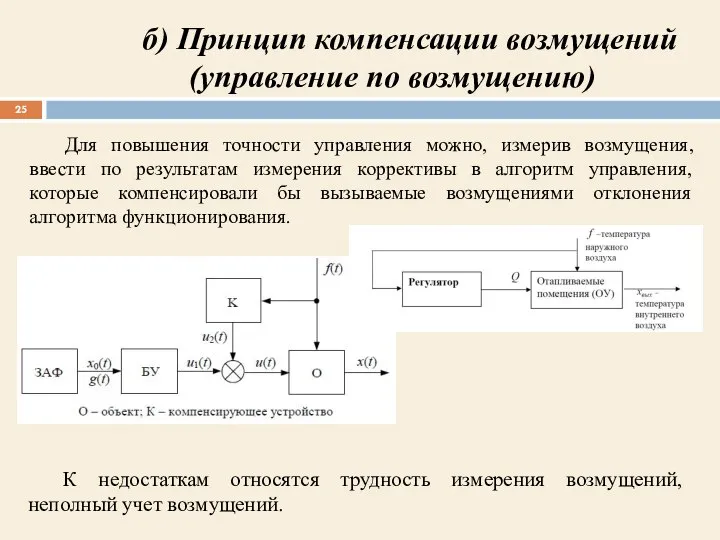
- 25. К недостаткам относятся трудность измерения возмущений, неполный учет возмущений. б) Принцип компенсации возмущений (управление по возмущению)
- 26. САУ с применением принципа управления по возмущению имеет закон управления На ОУ могут воздействовать несколько возмущений
- 27. Функциональная схема САУ c регулированием по ВОЗМУЩЕНИЮ u(t)=F[f(t)]
- 28. Систему можно построить так, чтобы точность выполнения алгоритма функционирования обеспечивалась и без измерения возмущений. В этом
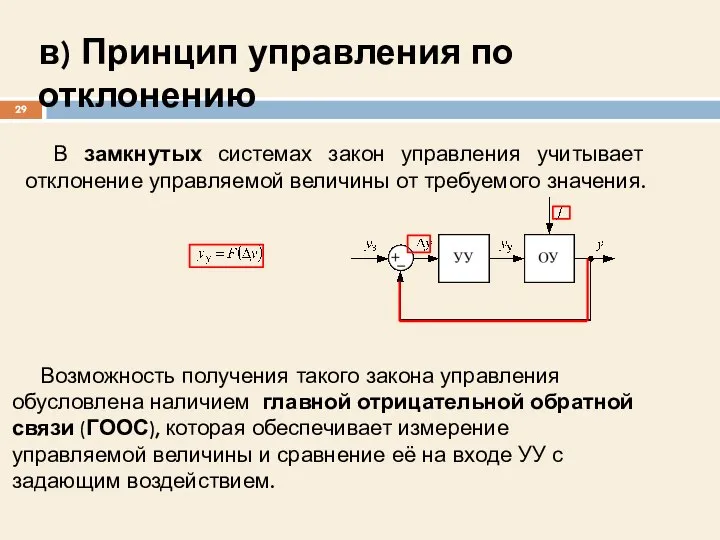
- 29. в) Принцип управления по отклонению В замкнутых системах закон управления учитывает отклонение управляемой величины от требуемого
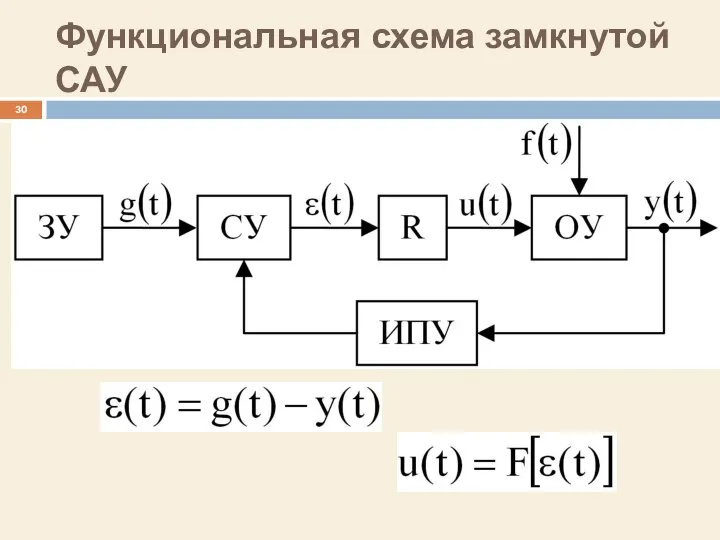
- 30. Функциональная схема замкнутой САУ
- 31. Наиболее эффективными являются системы автоматического управления, реализующие совместно и принцип обратной связи (управление по отклонению) и
- 32. Комбинированные САУ используют принципы управления по отклонению и возмущению одновременно г) Принцип комбинированного управления
- 33. Функциональная схема комбинированной САУ
- 34. Система автоматического управления называется статической по отношению к управляющему воздействию, если при постоянном внешнем воздействии, стремящемся
- 35. Системы Автоматического Управления Классификация САУ 2) По характеру задающего воздействия а) системы стабилизации G=const б)системы программного
- 36. 2. Классификация по характеру задающего воздействия – системы стабилизации (задающее воздействие Хвх(t) = const); – системы
- 37. Системы Автоматического Управления Классификация САУ 3) По характеру сигнала а)непрерывного действия б)дискретного действия 4) По виду
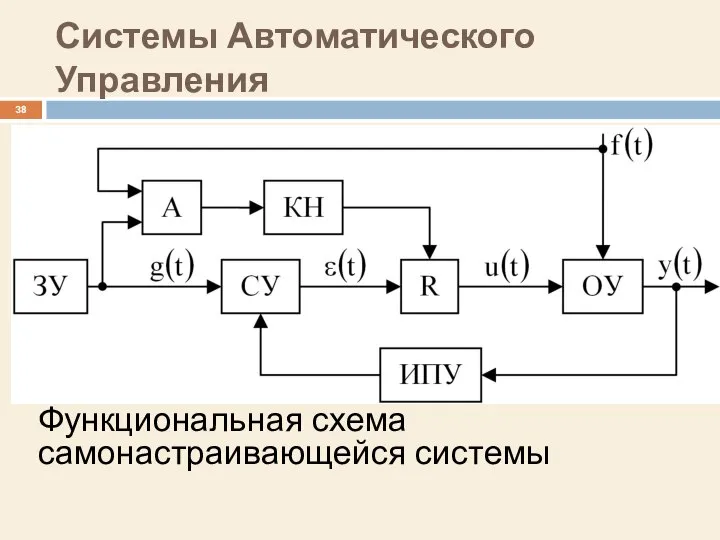
- 38. Системы Автоматического Управления Функциональная схема самонастраивающейся системы
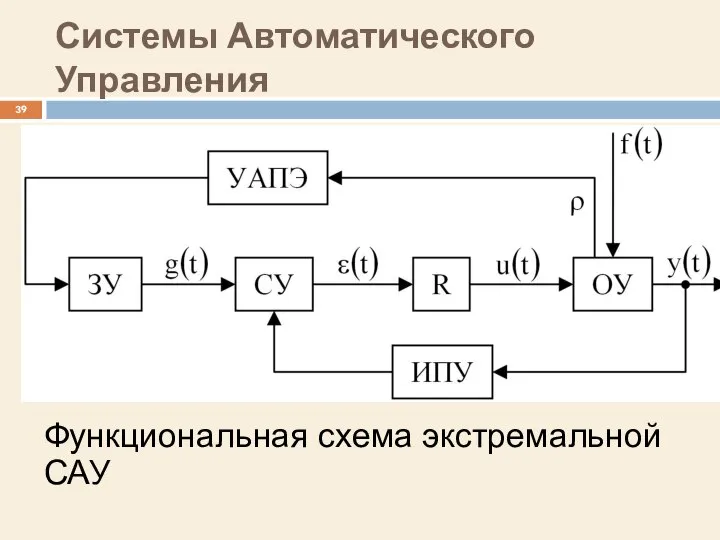
- 39. Системы Автоматического Управления Функциональная схема экстремальной САУ
- 40. 6. По числу управляемых величин: – САУ одноканальные (с одной управляемой величиной); – САУ многоканальные (с
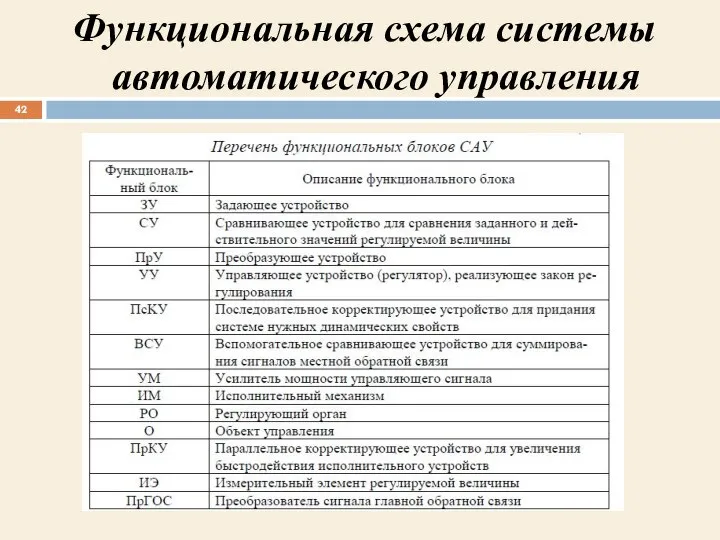
- 41. Функциональная схема системы автоматического управления
- 42. Функциональная схема системы автоматического управления
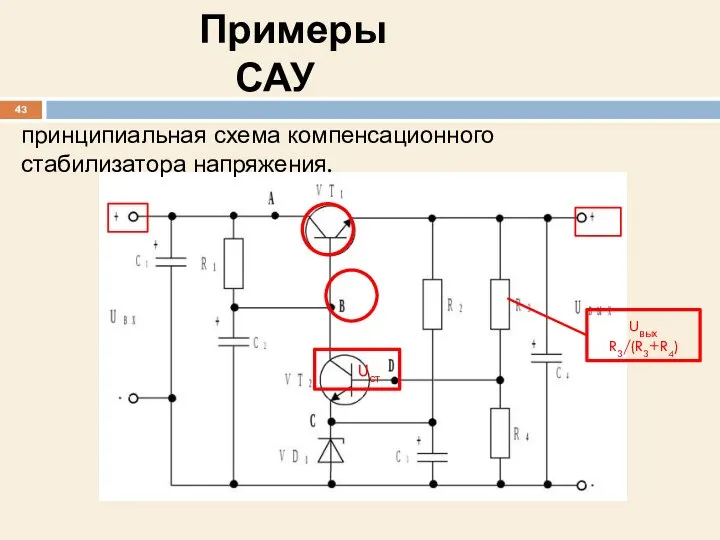
- 43. Примеры САУ Uст Uвых R3/(R3+R4) принципиальная схема компенсационного стабилизатора напряжения.
- 44. Примеры САУ принципиальная схема стабилизации частоты вращения вала двигателя постоянного тока, реализующая принцип управления по отклонению.
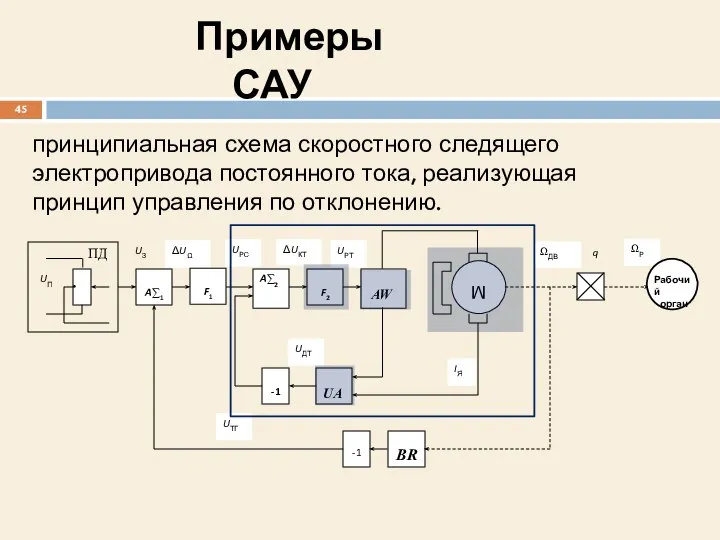
- 45. Примеры САУ принципиальная схема скоростного следящего электропривода постоянного тока, реализующая принцип управления по отклонению.
- 46. Принцип широтно-импульсной модуляции (ШИМ)
- 47. Классификация систем автоматического управления
- 48. Основные задачи ТАУ
- 49. Системы Автоматического Управления Функциональная схема
- 50. Линейные законы управления Пропорциональный закон управления описывается уравнением Коэффициент Кп называется коэффициентом передачи регулятора, а сам
- 52. Скачать презентацию
Теория автоматического управления
Основные понятия и определения
Теория автоматического управления – наука,
Теория автоматического управления
Основные понятия и определения
Теория автоматического управления – наука,
Теория автоматического управления
Основные понятия и определения
Теория автоматического управления базируется на
Теория автоматического управления
Основные понятия и определения
Теория автоматического управления базируется на
Автоматика – наука об общих принципах и методах построения автоматически действующих
Автоматика – наука об общих принципах и методах построения автоматически действующих
Под объектом автоматического управления понимают машину или установку, требуемый режим работы
Под объектом автоматического управления понимают машину или установку, требуемый режим работы
К входным параметрам относят физические величины характеризирующие сырье и энергетические потоки.
К входным параметрам относят физические величины характеризирующие сырье и энергетические потоки.
Основные определения и понятия
Автоматическое управление – управление без участия человека (чем
Основные определения и понятия
Автоматическое управление – управление без участия человека (чем

Основные определения и понятия
(устройство управления)
(объект управления)
V(t) – вектор управляющего воздействия
Y(t) –
Основные определения и понятия
(устройство управления)
(объект управления)
V(t) – вектор управляющего воздействия
Y(t) –
В зависимости от степени участия оператора в процессе управления различают следующие
В зависимости от степени участия оператора в процессе управления различают следующие
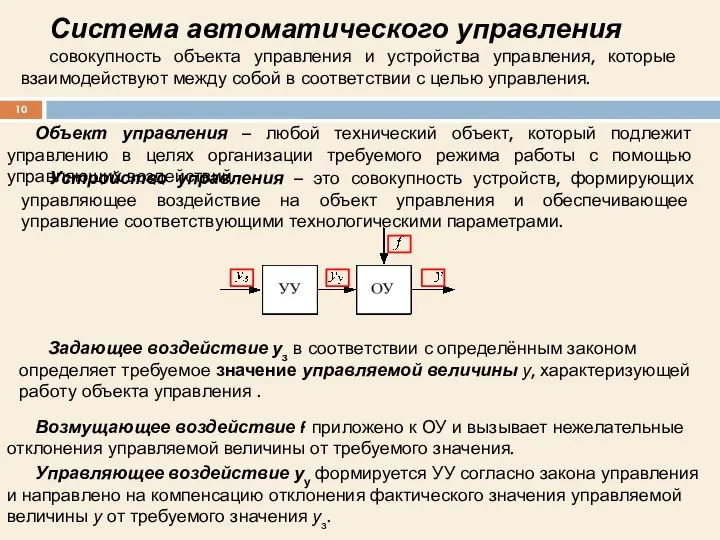
Задающее воздействие уз в соответствии с определённым законом определяет требуемое значение
Задающее воздействие уз в соответствии с определённым законом определяет требуемое значение
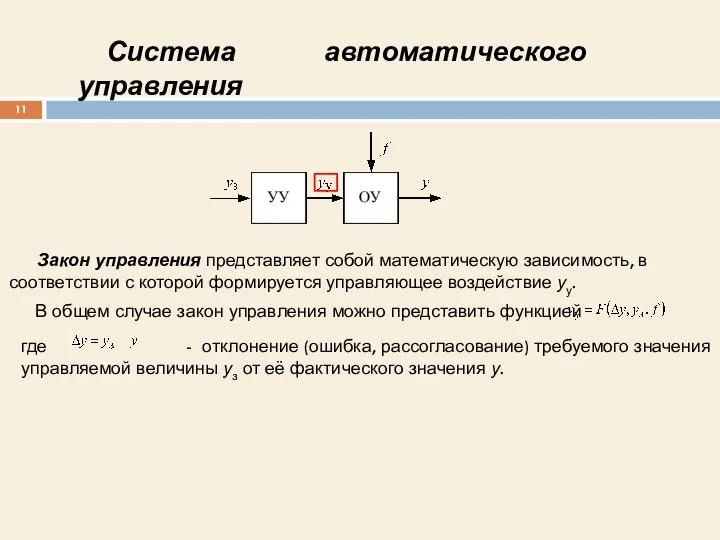
Закон управления представляет собой математическую зависимость, в соответствии с которой формируется
Закон управления представляет собой математическую зависимость, в соответствии с которой формируется
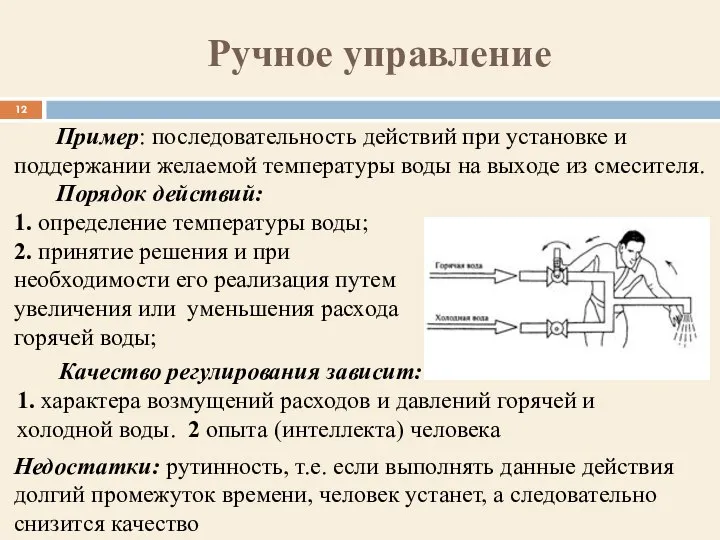
Ручное управление
Порядок действий:
1. определение температуры воды;
2. принятие решения и при
Ручное управление
Порядок действий:
1. определение температуры воды;
2. принятие решения и при
Управление с участием человека (чем сложнее объект управления, тем сложнее полностью
Управление с участием человека (чем сложнее объект управления, тем сложнее полностью
1.Стабилизация параметров непрерывных технологических процессов, таких как давление, температура, уровень, расход

Магистральная линия развития НТП
Магистральная линия развития НТП
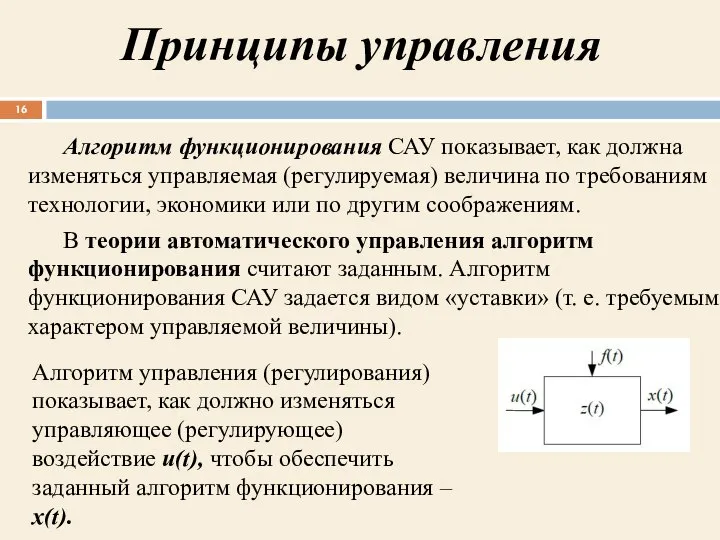
Алгоритм функционирования САУ показывает, как должна изменяться управляемая (регулируемая) величина по
Алгоритм функционирования САУ показывает, как должна изменяться управляемая (регулируемая) величина по
Системы Автоматического Управления
Классификация САУ
1) По принципу регулирования
а) разомкнутые
Системы Автоматического Управления
Классификация САУ
1) По принципу регулирования
а) разомкнутые
Системы Автоматического Управления
Классификация САУ
2) По характеру задающего воздействия
а) системы
Системы Автоматического Управления
Классификация САУ
2) По характеру задающего воздействия
а) системы
Системы Автоматического Управления
Классификация САУ
3) По характеру сигнала
а)непрерывного действия
б)дискретного
Системы Автоматического Управления
Классификация САУ
3) По характеру сигнала
а)непрерывного действия
б)дискретного
6. По числу управляемых величин:
– САУ одноканальные (с одной управляемой величиной);
6. По числу управляемых величин:
– САУ одноканальные (с одной управляемой величиной);
В настоящее время в технике известны и используются три принципа управления
В настоящее время в технике известны и используются три принципа управления
а. Принцип разомкнутого управления
В зависимости от принципа управления, положенного в основу
а. Принцип разомкнутого управления
В зависимости от принципа управления, положенного в основу

а. Принцип разомкнутого управления
Алгоритм управления вырабатывается только на основе заданного алгоритма
а. Принцип разомкнутого управления
Алгоритм управления вырабатывается только на основе заданного алгоритма

Функциональная схема разомкнутой САУ
Функциональная схема разомкнутой САУ
К недостаткам относятся трудность измерения возмущений, неполный учет возмущений.
б) Принцип компенсации
К недостаткам относятся трудность измерения возмущений, неполный учет возмущений.
б) Принцип компенсации
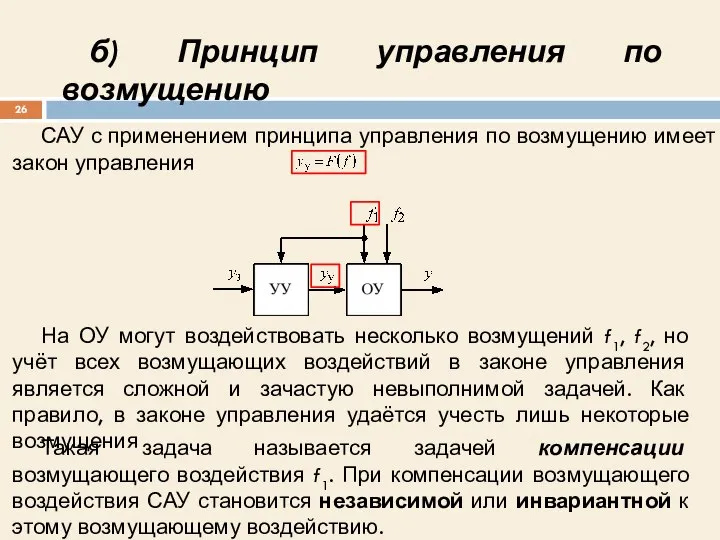
САУ с применением принципа управления по возмущению имеет закон управления
На ОУ
САУ с применением принципа управления по возмущению имеет закон управления
На ОУ
![Функциональная схема САУ c регулированием по ВОЗМУЩЕНИЮ u(t)=F[f(t)]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/699693/slide-26.jpg)
Функциональная схема САУ c регулированием по ВОЗМУЩЕНИЮ
u(t)=F[f(t)]
Функциональная схема САУ c регулированием по ВОЗМУЩЕНИЮ
u(t)=F[f(t)]
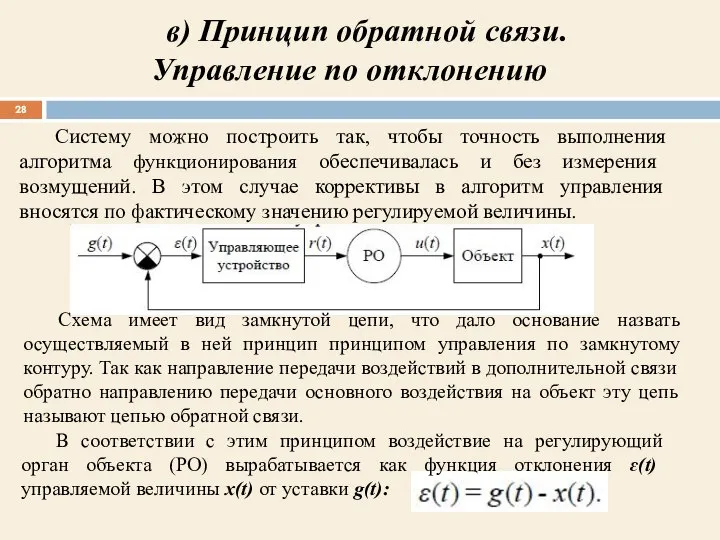
Систему можно построить так, чтобы точность выполнения алгоритма функционирования обеспечивалась и
Систему можно построить так, чтобы точность выполнения алгоритма функционирования обеспечивалась и
в) Принцип управления по отклонению
В замкнутых системах закон управления учитывает отклонение
в) Принцип управления по отклонению
В замкнутых системах закон управления учитывает отклонение
Функциональная схема замкнутой САУ
Функциональная схема замкнутой САУ

Наиболее эффективными являются системы автоматического управления, реализующие совместно и принцип обратной
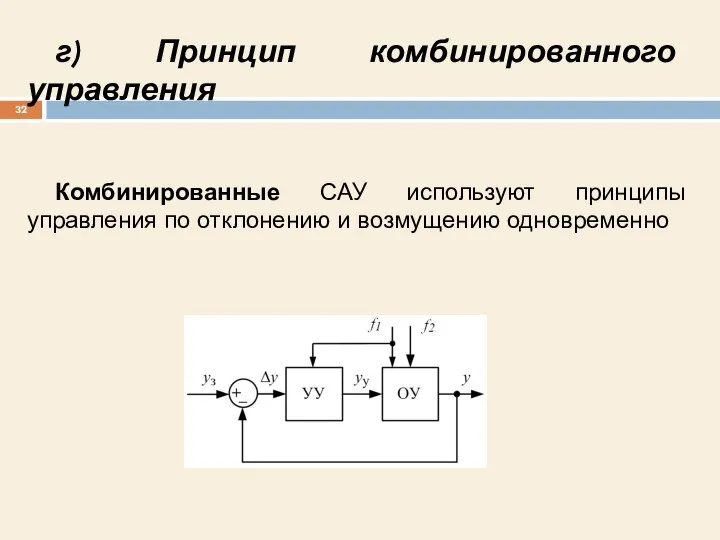
Комбинированные САУ используют принципы управления по отклонению и возмущению одновременно
г) Принцип
Комбинированные САУ используют принципы управления по отклонению и возмущению одновременно
г) Принцип
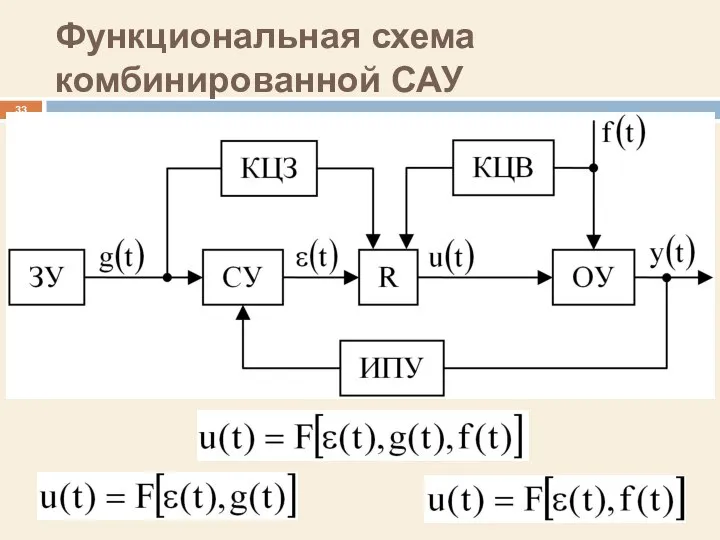
Функциональная схема комбинированной САУ
Функциональная схема комбинированной САУ
Система автоматического управления называется статической по отношению к управляющему воздействию, если
Система автоматического управления называется статической по отношению к управляющему воздействию, если
Системы Автоматического Управления
Классификация САУ
2) По характеру задающего воздействия
а) системы
Системы Автоматического Управления
Классификация САУ
2) По характеру задающего воздействия
а) системы
2. Классификация по характеру задающего воздействия
– системы стабилизации (задающее воздействие
2. Классификация по характеру задающего воздействия
– системы стабилизации (задающее воздействие
Системы Автоматического Управления
Классификация САУ
3) По характеру сигнала
а)непрерывного действия
б)дискретного
Системы Автоматического Управления
Классификация САУ
3) По характеру сигнала
а)непрерывного действия
б)дискретного
Системы Автоматического Управления
Функциональная схема самонастраивающейся системы
Системы Автоматического Управления
Функциональная схема самонастраивающейся системы
Системы Автоматического Управления
Функциональная схема экстремальной САУ
Системы Автоматического Управления
Функциональная схема экстремальной САУ
6. По числу управляемых величин:
– САУ одноканальные (с одной управляемой величиной);
6. По числу управляемых величин:
– САУ одноканальные (с одной управляемой величиной);

Функциональная схема системы автоматического управления
Функциональная схема системы автоматического управления
Функциональная схема системы автоматического управления
Функциональная схема системы автоматического управления
Примеры САУ
Uст
Uвых R3/(R3+R4)
принципиальная схема компенсационного стабилизатора напряжения.
Примеры САУ
Uст
Uвых R3/(R3+R4)
принципиальная схема компенсационного стабилизатора напряжения.

Примеры САУ
принципиальная схема стабилизации частоты вращения вала двигателя постоянного тока, реализующая
Примеры САУ
принципиальная схема стабилизации частоты вращения вала двигателя постоянного тока, реализующая
Примеры САУ
принципиальная схема скоростного следящего электропривода постоянного тока, реализующая принцип управления
Примеры САУ
принципиальная схема скоростного следящего электропривода постоянного тока, реализующая принцип управления

Принцип широтно-импульсной модуляции (ШИМ)
Принцип широтно-импульсной модуляции (ШИМ)
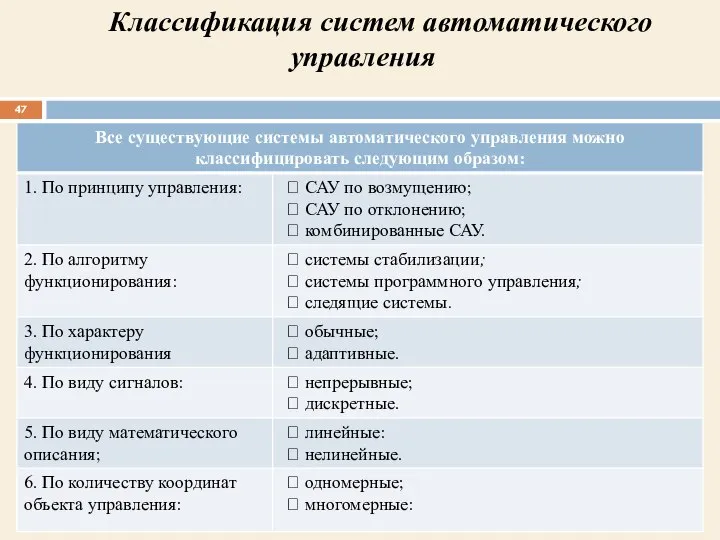
Классификация систем автоматического управления
Классификация систем автоматического управления
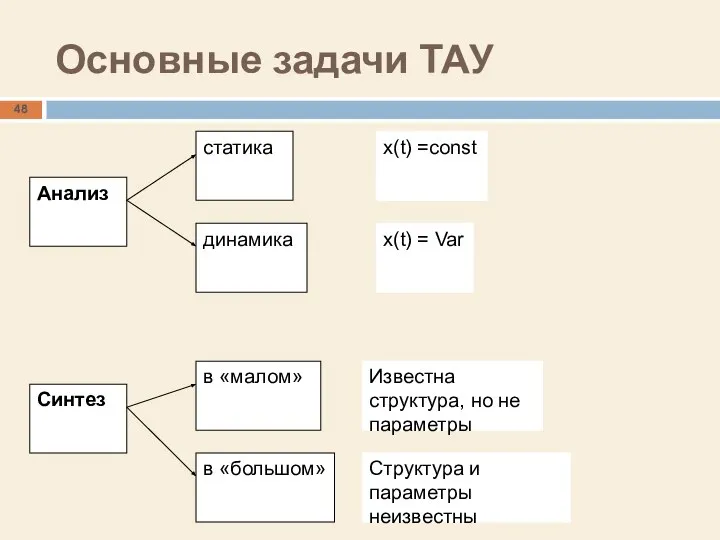
Основные задачи ТАУ
Основные задачи ТАУ
Системы Автоматического Управления
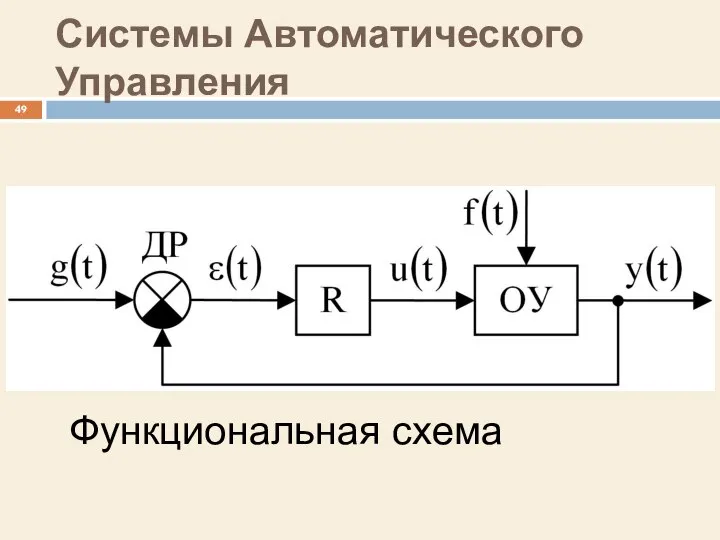
Функциональная схема
Системы Автоматического Управления
Функциональная схема
Линейные законы управления
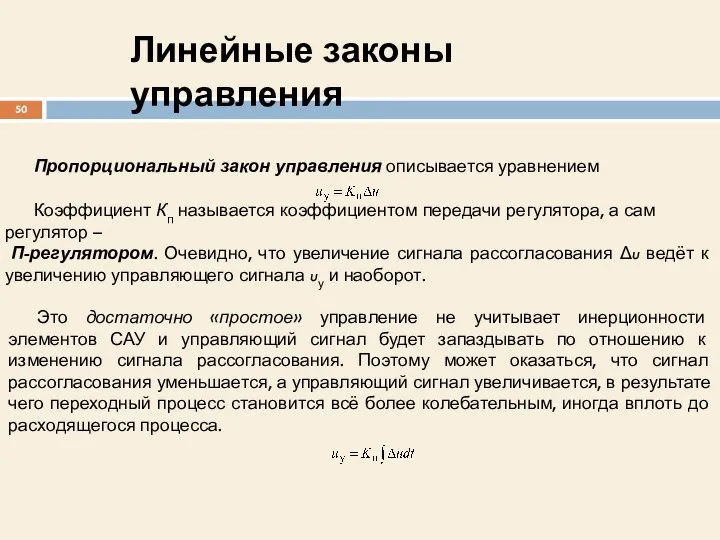
Пропорциональный закон управления описывается уравнением
Коэффициент Кп называется коэффициентом передачи
Линейные законы управления
Пропорциональный закон управления описывается уравнением
Коэффициент Кп называется коэффициентом передачи
 Презентация Масса тела
Презентация Масса тела Abrasive materials. Classification, structure, properties and applications
Abrasive materials. Classification, structure, properties and applications Звук и его характеристики. (9 класс)
Звук и его характеристики. (9 класс) Реальная жидкость. Вязкость
Реальная жидкость. Вязкость  Применение изотопов человеком
Применение изотопов человеком Пособие по безработице в зарубежных странах
Пособие по безработице в зарубежных странах Задняя подвеска Skoda Octavia A5
Задняя подвеска Skoda Octavia A5 Диод және оның түрлері
Диод және оның түрлері Производная в электродинамике
Производная в электродинамике Закон Кулона. Напряженность электростатического поля
Закон Кулона. Напряженность электростатического поля Взаимные превращения жидкости, пара и твёрдого тела
Взаимные превращения жидкости, пара и твёрдого тела Урок повторения Световые кванты
Урок повторения Световые кванты Развитие прикладных исследований по применению сверхвысокочастотного излучения (на примере пиролиза торфа)
Развитие прикладных исследований по применению сверхвысокочастотного излучения (на примере пиролиза торфа) Устройство преобразования частотного спектра звуковых сигналов
Устройство преобразования частотного спектра звуковых сигналов Електричний струм у рідинах Виконала учениця 11-А класу Ковальова Анастасія
Електричний струм у рідинах Виконала учениця 11-А класу Ковальова Анастасія  Презентация по физике "Законы Ньютона. Инерциальные системы отсчёта" - скачать
Презентация по физике "Законы Ньютона. Инерциальные системы отсчёта" - скачать  Гироскопические приборы и устройства. Гироприборы на основе двухстепенного гироскопа (тема № 13, занятие № 4)
Гироскопические приборы и устройства. Гироприборы на основе двухстепенного гироскопа (тема № 13, занятие № 4) Презентация по физике "Цветовое многообразие" - скачать
Презентация по физике "Цветовое многообразие" - скачать  Название курса: Физика 10 класс. Название темы урока: Законы Ньютона.
Название курса: Физика 10 класс. Название темы урока: Законы Ньютона.  Поляризация. Лекция 5
Поляризация. Лекция 5 Люминесцентный анализ. Основные понятия
Люминесцентный анализ. Основные понятия Производство и использование электрической энергии. Экологическое воспитание школьников. 11 класс
Производство и использование электрической энергии. Экологическое воспитание школьников. 11 класс Строение атомного ядра. Ядерные силы. Энергия связи атомных ядер
Строение атомного ядра. Ядерные силы. Энергия связи атомных ядер Электрические явления в природе и технике
Электрические явления в природе и технике Соединения деталей машин
Соединения деталей машин Линзы. Оптическая сила линзы. 9 класс
Линзы. Оптическая сила линзы. 9 класс Компрессоры. Классификация
Компрессоры. Классификация Детали машин
Детали машин