- Теория движения военных колесных машин. Лекция 2

Содержание
- 2. В зависимости от направления продольной силы Px и крутящего момента Mк, действующих на колесо принято различать
- 3. Ведомый режим Mк = 0 Px
- 4. Свободный режим Mк > 0 Px = 0
- 5. Ведущий режим Mк > 0 Px > 0
- 6. Нейтральный режим Mк > 0 Px
- 7. Тормозной режим Mк Px
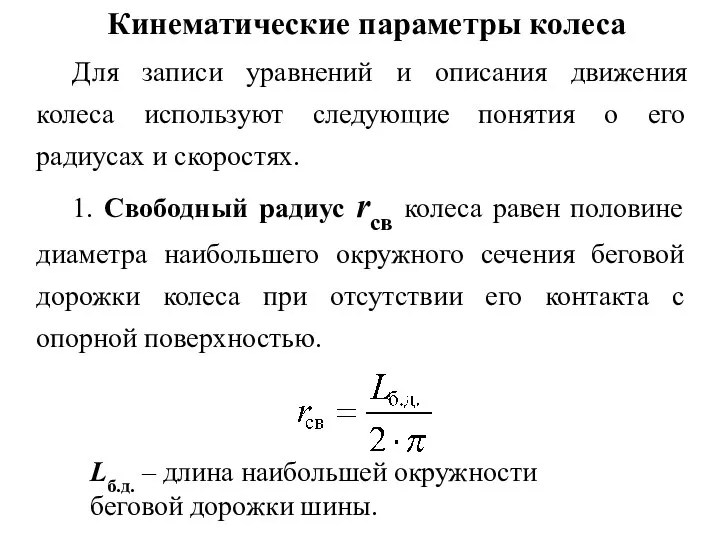
- 8. Кинематические параметры колеса Для записи уравнений и описания движения колеса используют следующие понятия о его радиусах
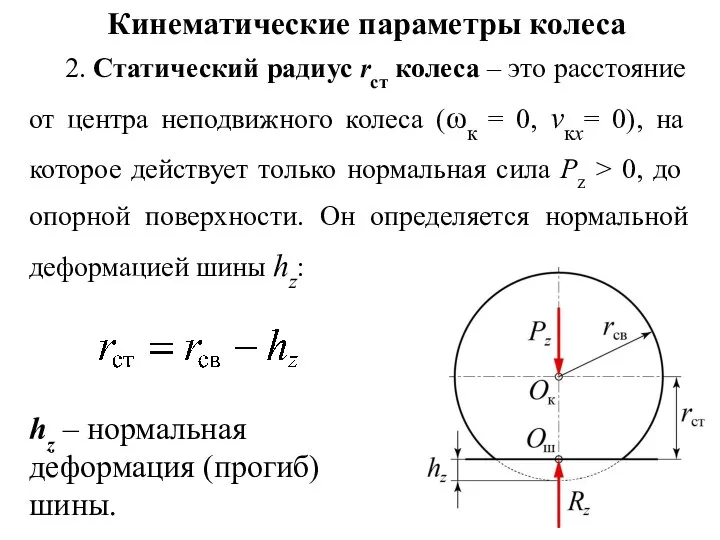
- 9. Кинематические параметры колеса 2. Статический радиус rст колеса – это расстояние от центра неподвижного колеса (ωк
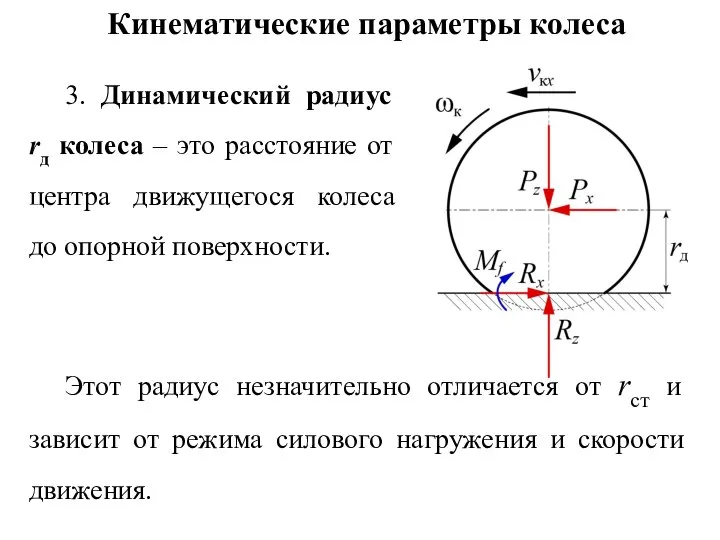
- 10. Кинематические параметры колеса 3. Динамический радиус rд колеса – это расстояние от центра движущегося колеса до
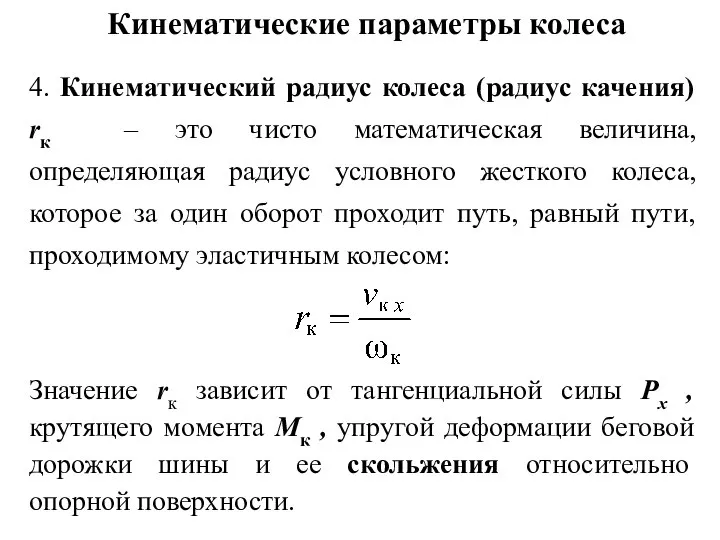
- 11. Кинематические параметры колеса 4. Кинематический радиус колеса (радиус качения) rк – это чисто математическая величина, определяющая
- 12. Радиус качения Необходимость в таком радиусе объясняется тем, что вследствие тангенциальной эластичности и проскальзывания отдельных элементов
- 13. При положительных значениях Мк и Рх часть шины, приближающаяся к зоне контакта, сжимается и длина окружности
- 14. При малых значениях Мк и Рх интегральное значение скорости скольжения vs в пятне контакта близко к
- 15. Эту упругую деформацию иногда называют упругим скольжением. Изменение rк при отсутствии непосредственного скольжения (vs = 0)
- 16. Базовыми точками при определении rк0 являются значения радиуса rкв в ведомом режиме качения (Мк = 0)
- 17. Базовыми точками при определении rк0 являются значения радиуса rкв в ведомом режиме качения (Мк = 0)
- 18. Значения rк0 ограничиваются возможностью максимального сжатия и растяжения беговой дорожки шины. При интенсивном скольжении (неупругом) характер
- 19. При качении эластичного колеса скорости скольжения отдельных элементов беговой дорожки относительно опорной поверхности в зоне контакта
- 20. Каждая точка на окружности с радиусом rк0 движется относительно центра т. Oк с относительной скоростью vотн
- 21. Точку O, в которой абсолютная скорость равна нулю, принято называть мгновенным центром вращения колеса. Скорость скольжения
- 22. Чистое качение колеса Мгновенный центр вращения т. O совпадает с центром контакта т. Oш.
- 23. Буксование колеса Мгновенный центр вращения т. O находится выше центра контакта т. Oш.
- 24. Юз колеса Мгновенный центр вращения т. O находится ниже центра контакта т. Oш.
- 25. Радиус качения определяется по уравнению: При этом учитывается только непосредственное скольжение и rк может быть получен
- 27. Скачать презентацию
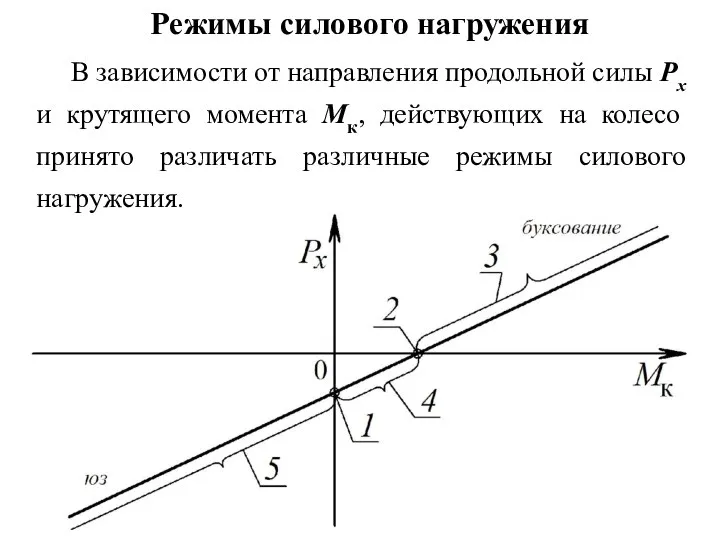
В зависимости от направления продольной силы Px и крутящего момента Mк,
В зависимости от направления продольной силы Px и крутящего момента Mк,
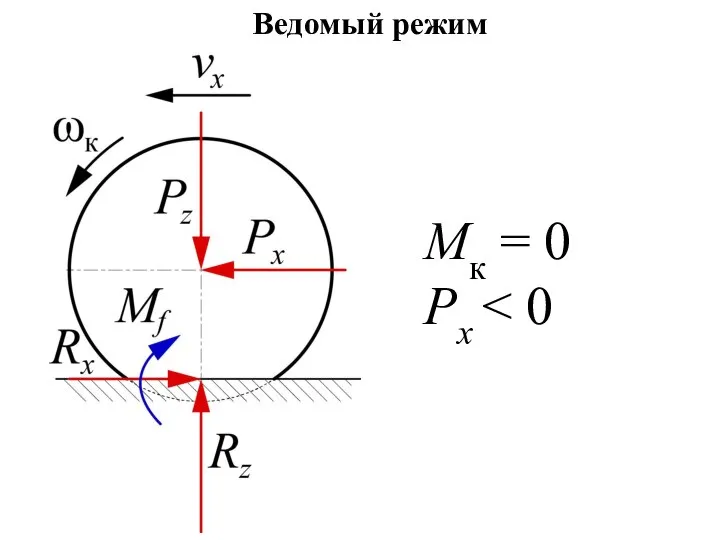
Ведомый режим
Mк = 0
Px < 0
Ведомый режим
Mк = 0
Px < 0
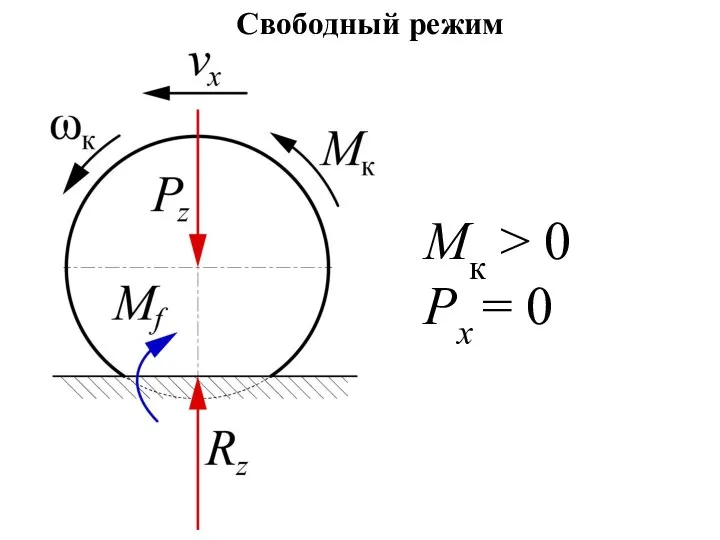
Свободный режим
Mк > 0
Px = 0
Свободный режим
Mк > 0
Px = 0
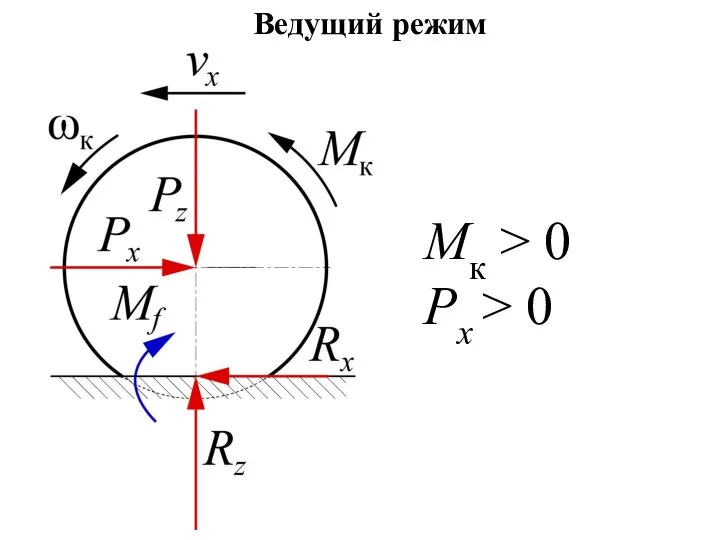
Ведущий режим
Mк > 0
Px > 0
Ведущий режим
Mк > 0
Px > 0
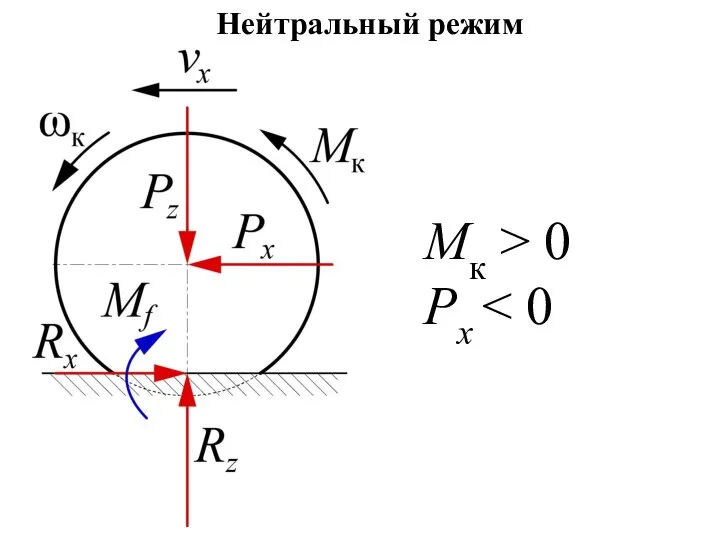
Нейтральный режим
Mк > 0
Px < 0
Нейтральный режим
Mк > 0
Px < 0
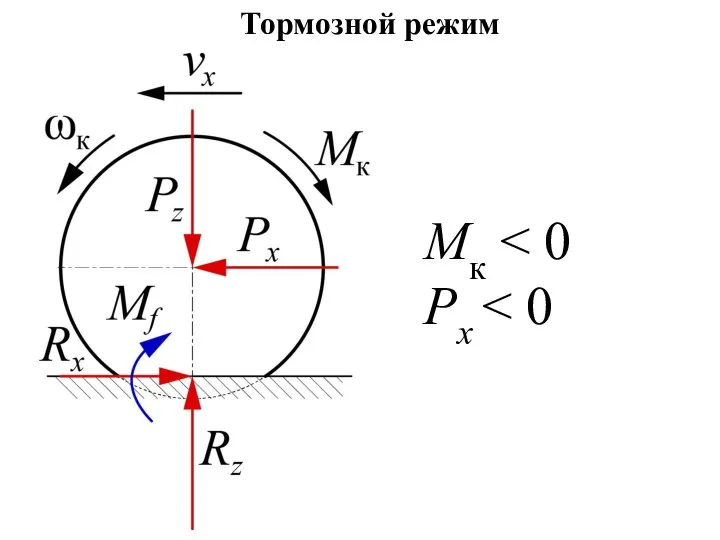
Тормозной режим
Mк < 0
Px < 0
Тормозной режим
Mк < 0
Px < 0
Кинематические параметры колеса
Для записи уравнений и описания движения колеса используют следующие
Кинематические параметры колеса
Для записи уравнений и описания движения колеса используют следующие
Кинематические параметры колеса
2. Статический радиус rст колеса – это расстояние от
Кинематические параметры колеса
2. Статический радиус rст колеса – это расстояние от
Кинематические параметры колеса
3. Динамический радиус rд колеса – это расстояние от
Кинематические параметры колеса
3. Динамический радиус rд колеса – это расстояние от
Кинематические параметры колеса
4. Кинематический радиус колеса (радиус качения) rк – это
Кинематические параметры колеса
4. Кинематический радиус колеса (радиус качения) rк – это
Радиус качения
Необходимость в таком радиусе объясняется тем, что вследствие тангенциальной эластичности
Радиус качения
Необходимость в таком радиусе объясняется тем, что вследствие тангенциальной эластичности
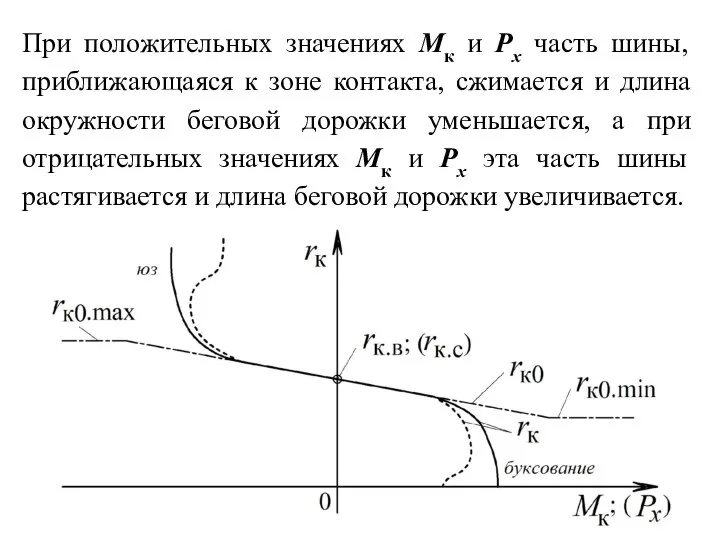
При положительных значениях Мк и Рх часть шины, приближающаяся к зоне
При положительных значениях Мк и Рх часть шины, приближающаяся к зоне
При малых значениях Мк и Рх интегральное значение скорости скольжения vs
При малых значениях Мк и Рх интегральное значение скорости скольжения vs
Эту упругую деформацию иногда называют упругим скольжением. Изменение rк при отсутствии
Эту упругую деформацию иногда называют упругим скольжением. Изменение rк при отсутствии
Базовыми точками при определении rк0 являются значения радиуса rкв в ведомом
Базовыми точками при определении rк0 являются значения радиуса rкв в ведомом
Базовыми точками при определении rк0 являются значения радиуса rкв в ведомом
Базовыми точками при определении rк0 являются значения радиуса rкв в ведомом
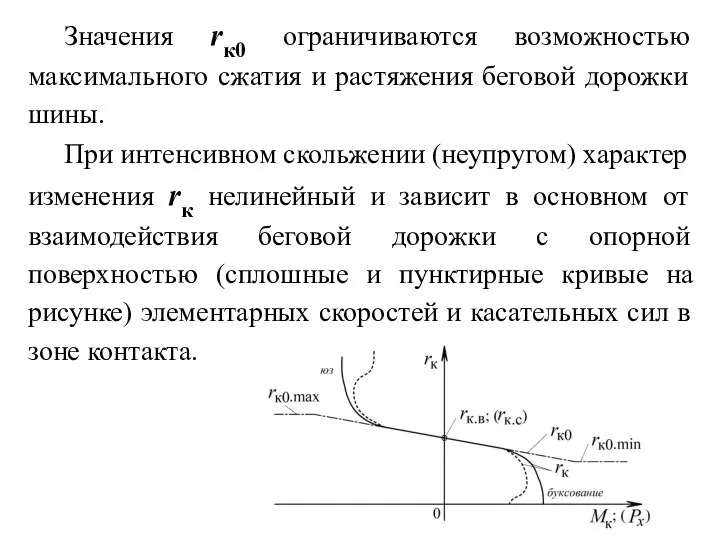
Значения rк0 ограничиваются возможностью максимального сжатия и растяжения беговой дорожки шины.
При
Значения rк0 ограничиваются возможностью максимального сжатия и растяжения беговой дорожки шины.
При
При качении эластичного колеса скорости скольжения отдельных элементов беговой дорожки относительно
При качении эластичного колеса скорости скольжения отдельных элементов беговой дорожки относительно
Каждая точка на окружности с радиусом rк0 движется относительно центра т.
Каждая точка на окружности с радиусом rк0 движется относительно центра т.
Точку O, в которой абсолютная скорость равна нулю, принято называть мгновенным
Точку O, в которой абсолютная скорость равна нулю, принято называть мгновенным
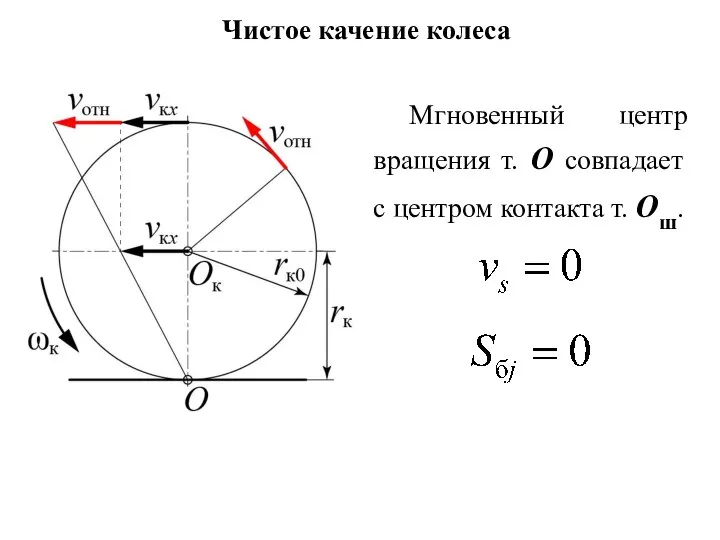
Чистое качение колеса
Мгновенный центр вращения т. O совпадает с центром контакта
Чистое качение колеса
Мгновенный центр вращения т. O совпадает с центром контакта
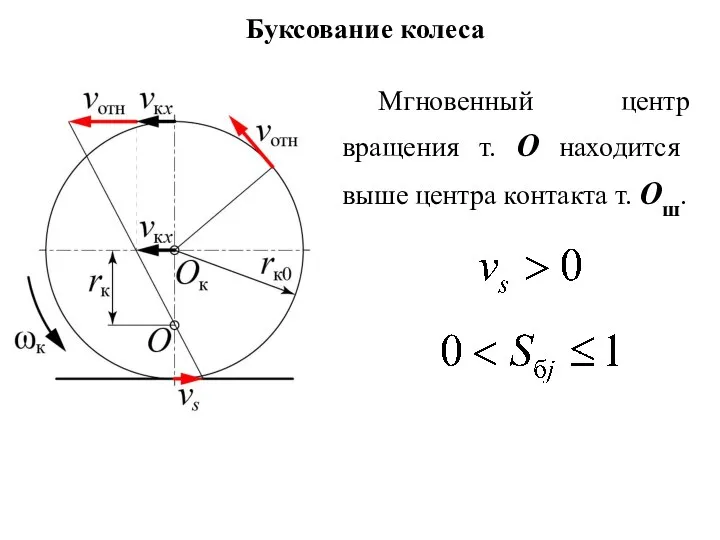
Буксование колеса
Мгновенный центр вращения т. O находится выше центра контакта т.
Буксование колеса
Мгновенный центр вращения т. O находится выше центра контакта т.
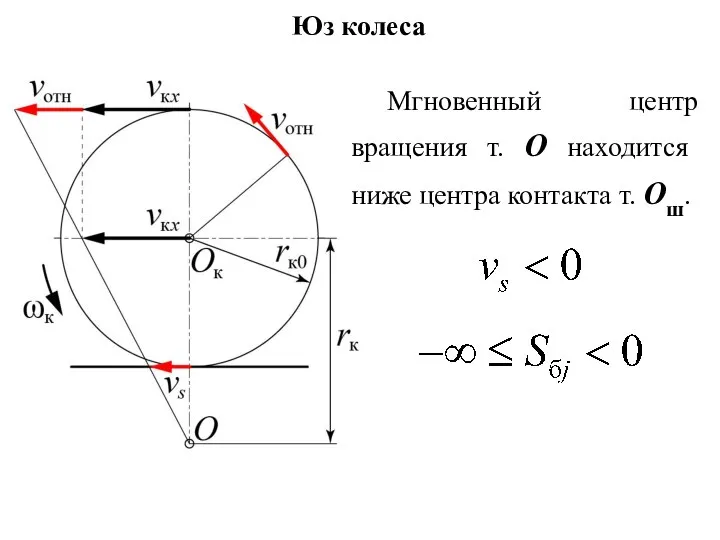
Юз колеса
Мгновенный центр вращения т. O находится ниже центра контакта т.
Юз колеса
Мгновенный центр вращения т. O находится ниже центра контакта т.
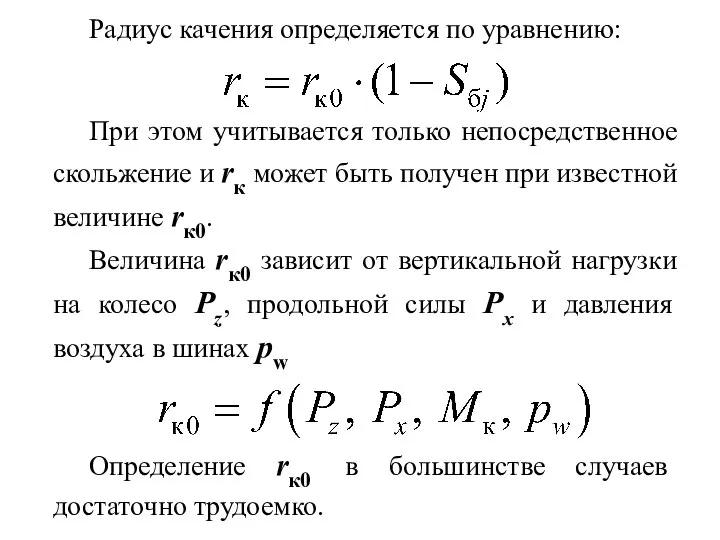
Радиус качения определяется по уравнению:
При этом учитывается только непосредственное скольжение и
Радиус качения определяется по уравнению:
При этом учитывается только непосредственное скольжение и
 Радиоактивный распад
Радиоактивный распад Сила. Явление тяготения. Сила тяжести
Сила. Явление тяготения. Сила тяжести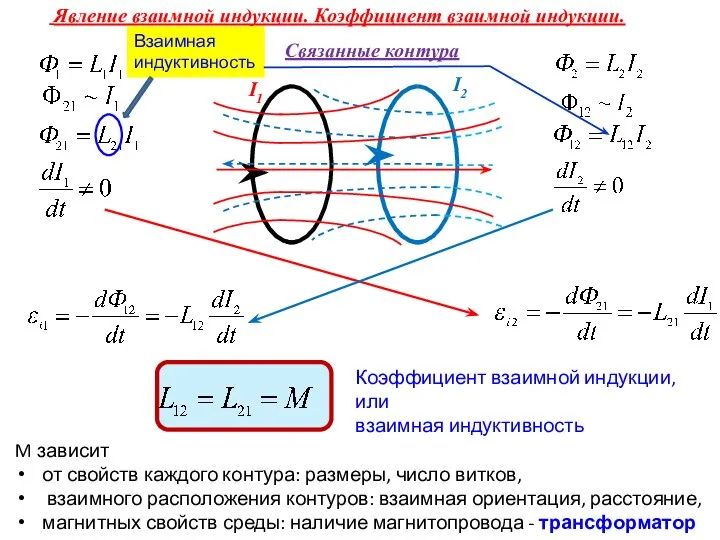 Явление взаимной индукции. Коэффициент взаимной индукции. Взаимная индуктивность
Явление взаимной индукции. Коэффициент взаимной индукции. Взаимная индуктивность Механічна взаємодія тіл. Сила
Механічна взаємодія тіл. Сила Проектная деятельность на уроках физики
Проектная деятельность на уроках физики ФИЗИКА ГРОЗЫ
ФИЗИКА ГРОЗЫ Открытие и исследование векторных бозонов в эксперименте ATLAS
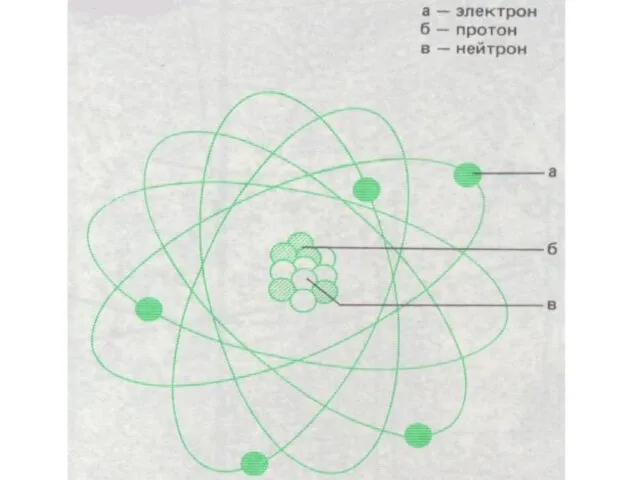
Открытие и исследование векторных бозонов в эксперименте ATLAS Модели атомов. Опыт Резерфорда.
Модели атомов. Опыт Резерфорда.  Cторонние силы
Cторонние силы Источник бесперебойного питания
Источник бесперебойного питания Величины, характеризующие колебательное движение.
Величины, характеризующие колебательное движение. Воздухоплавание
Воздухоплавание Нанотехнологии. Понятие и основные принципы нанотехнологии
Нанотехнологии. Понятие и основные принципы нанотехнологии Презентация по физике "Применение кристаллов" - скачать
Презентация по физике "Применение кристаллов" - скачать  Measurements at high voltage
Measurements at high voltage Квалиметриялық шкалалар
Квалиметриялық шкалалар Презентация по физике "Полное внутреннее отражение" - скачать
Презентация по физике "Полное внутреннее отражение" - скачать  История создания термометра
История создания термометра Тепловые двигатели
Тепловые двигатели Магнитное поле. Тема 7
Магнитное поле. Тема 7 Электромагнитное поле. Электромагнитные волны
Электромагнитное поле. Электромагнитные волны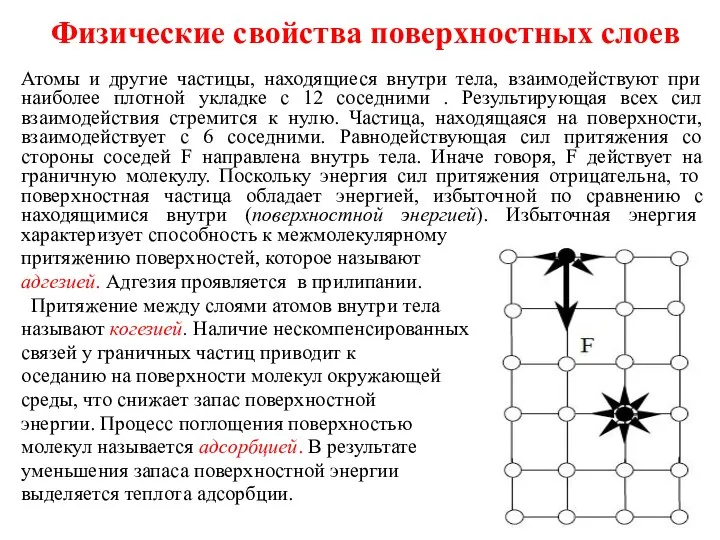 Физические свойства поверхностных слоев
Физические свойства поверхностных слоев Сравнение сил. 7класс
Сравнение сил. 7класс Аттестационная работа. Физика. Домашняя лаборатория. 7 класс
Аттестационная работа. Физика. Домашняя лаборатория. 7 класс Выполнили студенты гр. РБ-10: Егасова Т.Ю. Попова М.В. Приняла: Гостюхина В.В.
Выполнили студенты гр. РБ-10: Егасова Т.Ю. Попова М.В. Приняла: Гостюхина В.В. Плавание судов. Воздухоплавание
Плавание судов. Воздухоплавание Что изучает физика
Что изучает физика Рівномірний рух по колу
Рівномірний рух по колу