- Теория радиосистем передачи информации. (Лекция 2)

Содержание
- 2. Математические модели сообщений N - длина последовательности j - моменты начального дискетного времени вероятность появления в
- 3. Математические модели сообщений Дискретный источник называется стационарным, если его статистическое описание не зависит от начала отсчета
- 4. Математические модели сообщений
- 5. Математические модели сообщений
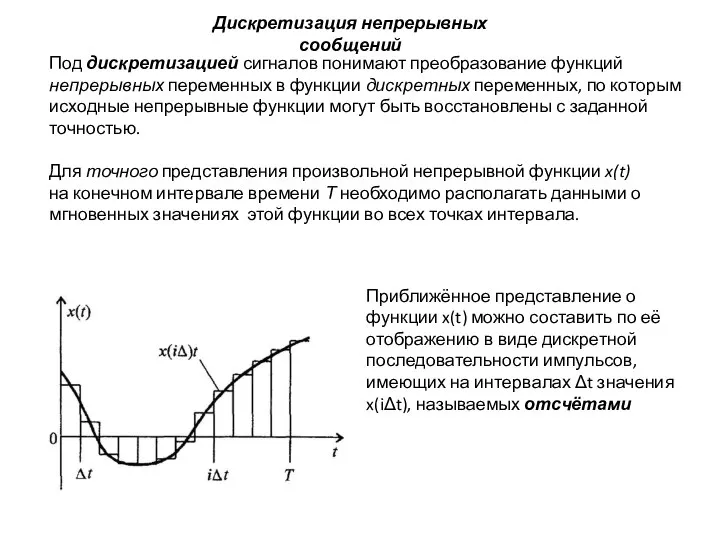
- 6. Дискретизация непрерывных сообщений Под дискретизацией сигналов понимают преобразование функций непрерывных переменных в функции дискретных переменных, по
- 7. Дискретизация непрерывных сообщений
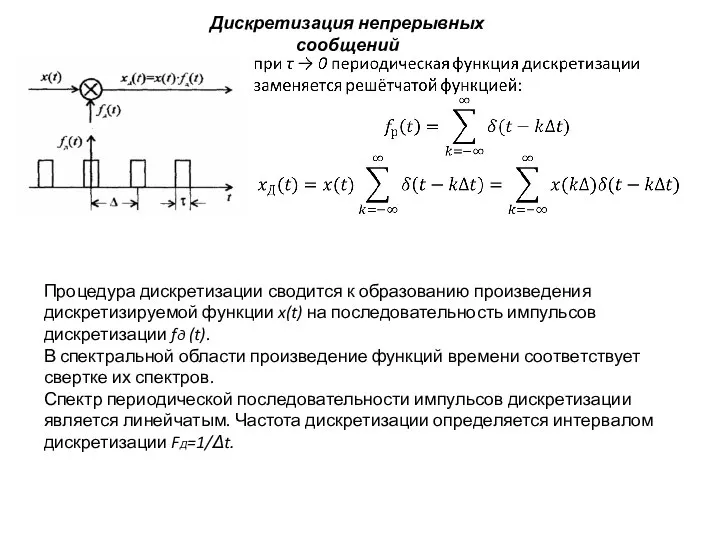
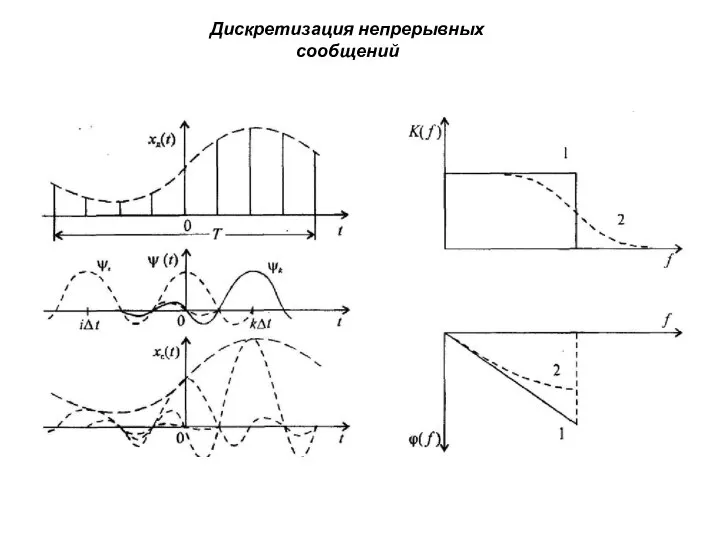
- 8. Дискретизация непрерывных сообщений Процедура дискретизации сводится к образованию произведения дискретизируемой функции x(t) на последовательность импульсов дискретизации
- 9. Дискретизация непрерывных сообщений
- 10. Дискретизация непрерывных сообщений
- 11. Дискретизация непрерывных сообщений
- 12. Дискретизация непрерывных сообщений
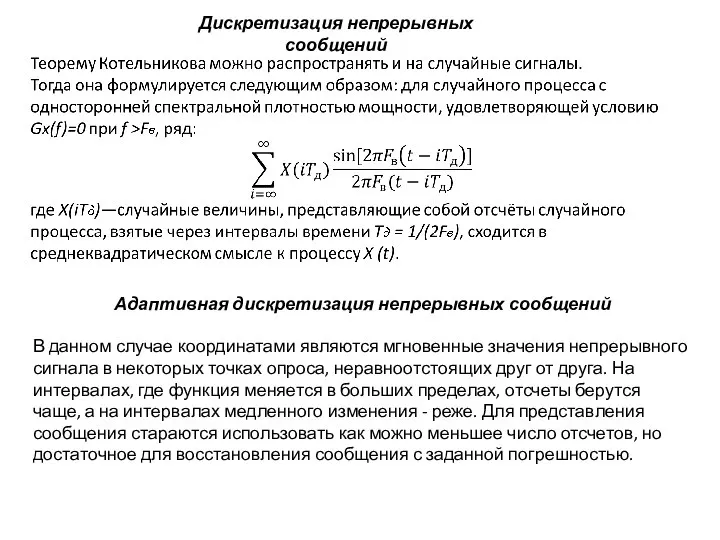
- 13. Дискретизация непрерывных сообщений Фундаментальное значение теоремы Котельникова заключается в том, что она обосновывает возможность дискретизации по
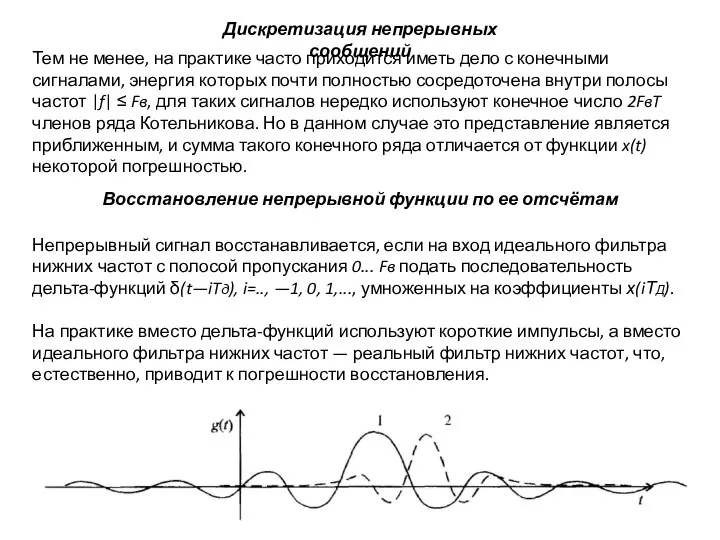
- 14. Дискретизация непрерывных сообщений Тем не менее, на практике часто приходится иметь дело с конечными сигналами, энергия
- 15. Дискретизация непрерывных сообщений
- 16. Дискретизация непрерывных сообщений Адаптивная дискретизация непрерывных сообщений В данном случае координатами являются мгновенные значения непрерывного сигнала
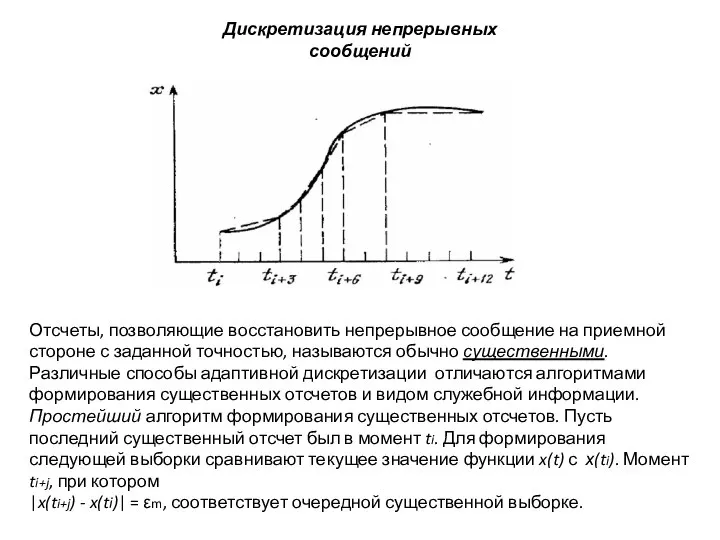
- 17. Дискретизация непрерывных сообщений Отсчеты, позволяющие восстановить непрерывное сообщение на приемной стороне с заданной точностью, называются обычно
- 18. При адаптивной дискретизации отсчеты передаются в случайные моменты. Поэтому для восстановления непрерывного сообщения по отсчетам приемная
- 19. Оптимизация устройств и систем приема информации Задача приёма сигналов состоит в наилучшем воспроизведении информации, заключенной в
- 20. Оптимизация устройств и систем приема информации 3. Сигнал со случайной амплитудой и начальной фазой здесь величины
- 21. Оптимизация устройств и систем приема информации Условная вероятность правильного обнаружения сигнала Сигнал передавался и решение принято,
- 22. Оптимизация устройств и систем приема информации Условная вероятность правильного необнаружения Сигнал не передавался и решение принято,
- 23. Оптимизация устройств и систем приема информации Критерий максимума правдоподобия В этом критерии анализируется отношение правдоподобия –
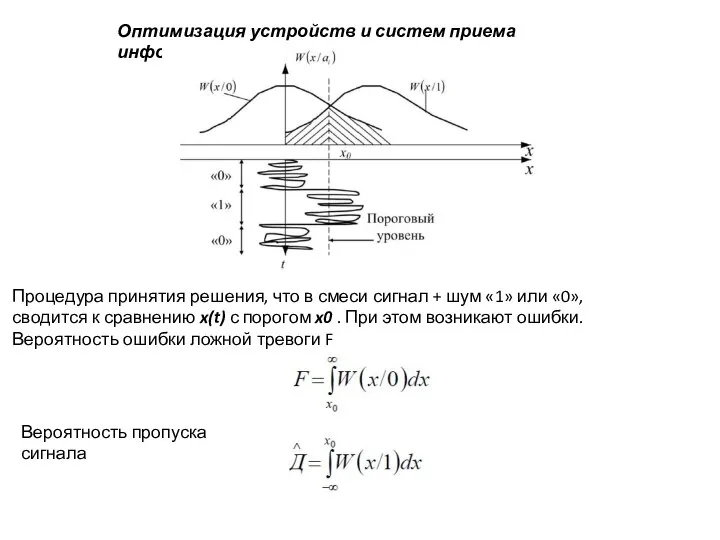
- 24. Оптимизация устройств и систем приема информации Процедура принятия решения, что в смеси сигнал + шум «1»
- 25. Оптимизация устройств и систем приема информации Вероятность правильного обнаружения Критерий максимума правдоподобия используется в системах цифро-
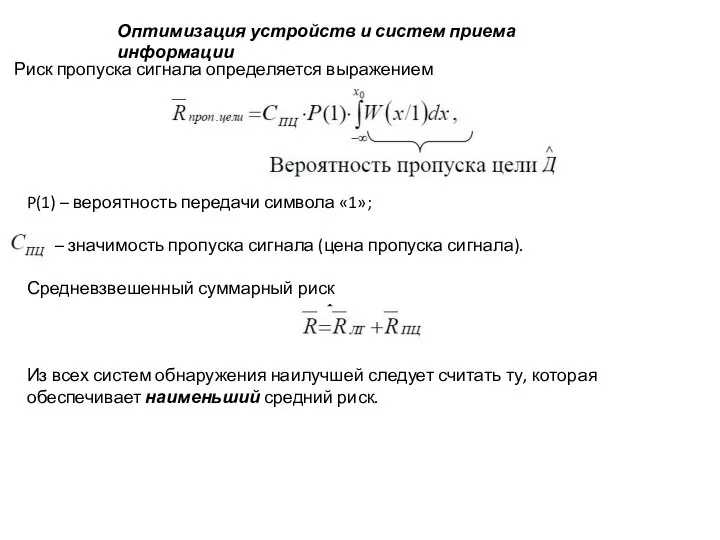
- 26. Оптимизация устройств и систем приема информации Риск пропуска сигнала определяется выражением P(1) – вероятность передачи символа
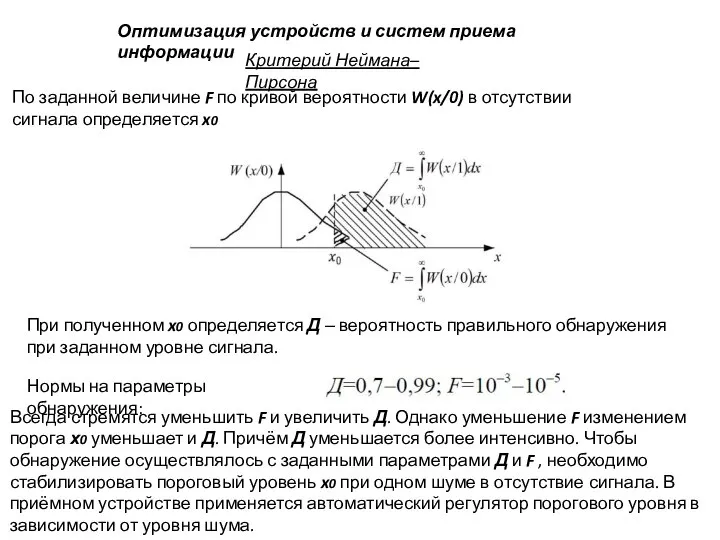
- 27. Оптимизация устройств и систем приема информации Критерий Неймана–Пирсона По заданной величине F по кривой вероятности W(x/0)
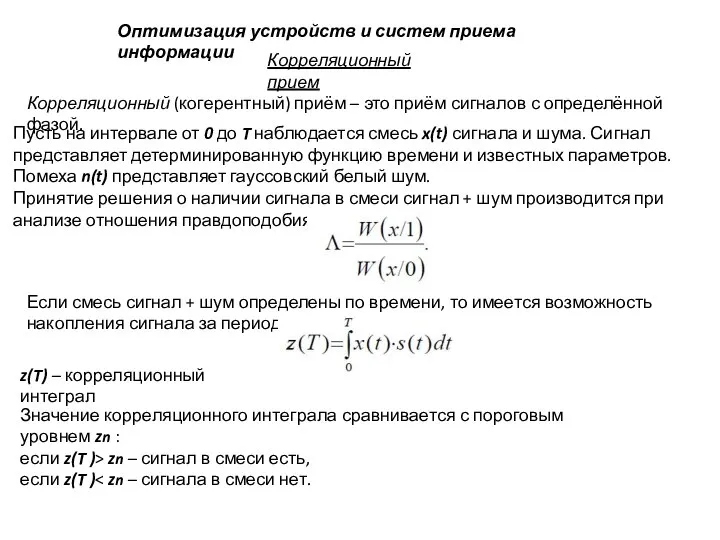
- 28. Оптимизация устройств и систем приема информации Корреляционный прием Корреляционный (когерентный) приём – это приём сигналов с
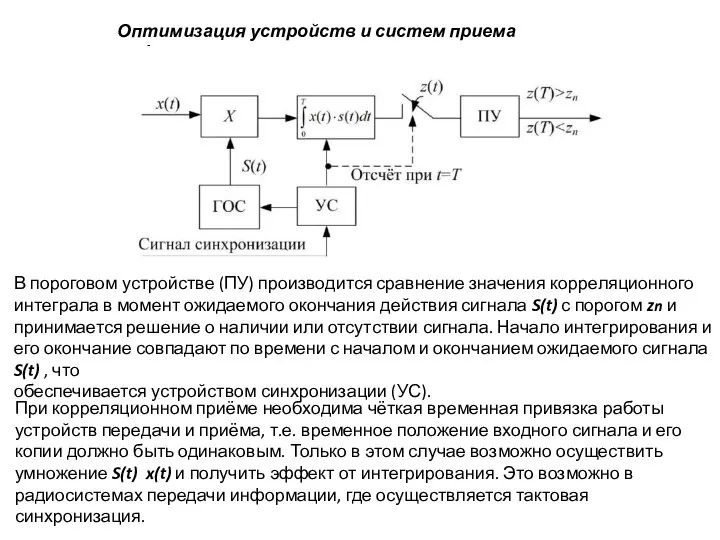
- 29. Оптимизация устройств и систем приема информации В пороговом устройстве (ПУ) производится сравнение значения корреляционного интеграла в
- 30. Оптимизация устройств и систем приема информации
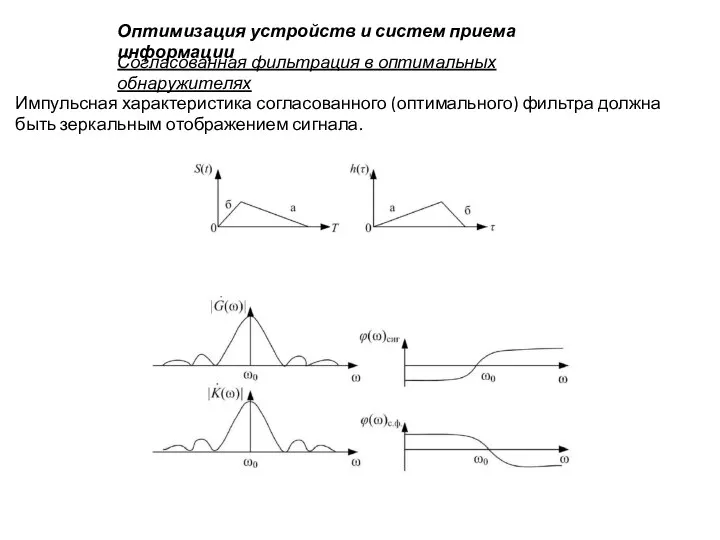
- 31. Оптимизация устройств и систем приема информации Согласованная фильтрация в оптимальных обнаружителях Импульсная характеристика согласованного (оптимального) фильтра
- 33. Скачать презентацию
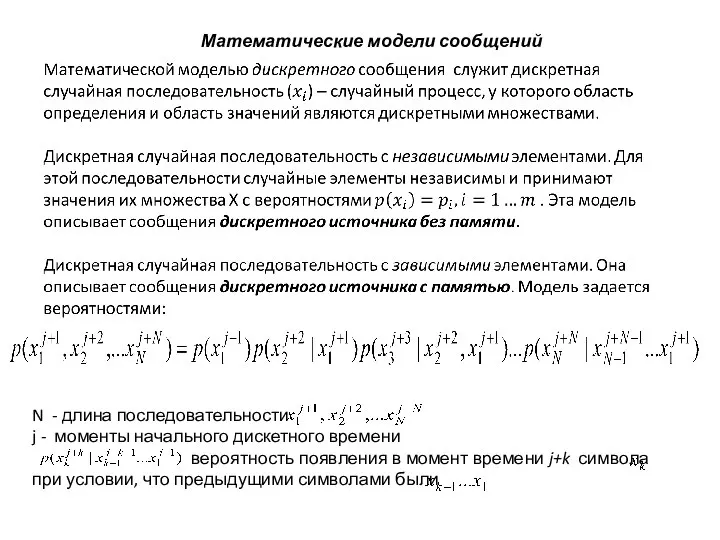
Математические модели сообщений
N - длина последовательности
j - моменты начального дискетного
Математические модели сообщений
N - длина последовательности
j - моменты начального дискетного
Математические модели сообщений
Дискретный источник называется стационарным, если его статистическое описание не
Математические модели сообщений
Дискретный источник называется стационарным, если его статистическое описание не
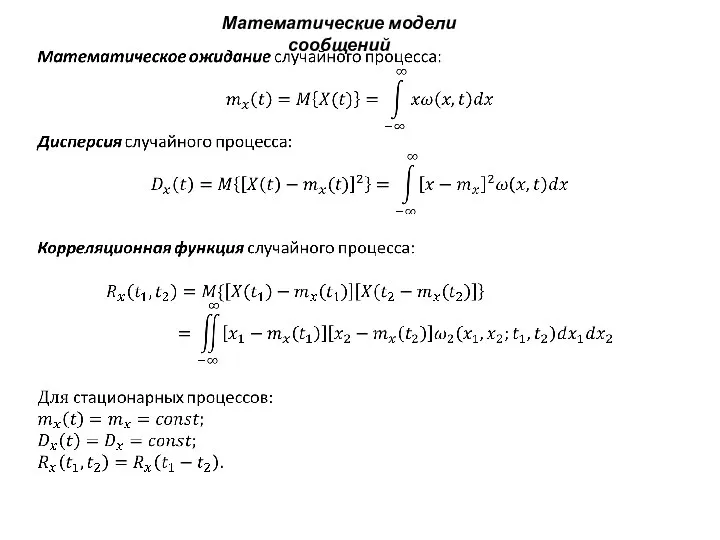
Математические модели сообщений
Математические модели сообщений
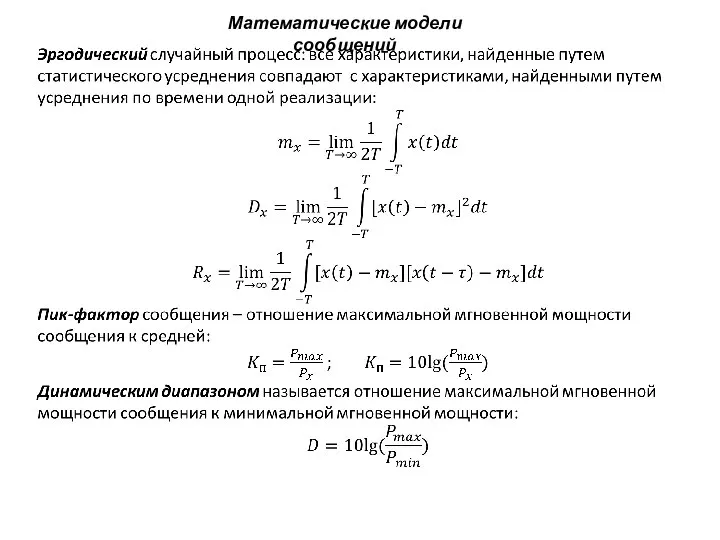
Математические модели сообщений
Математические модели сообщений
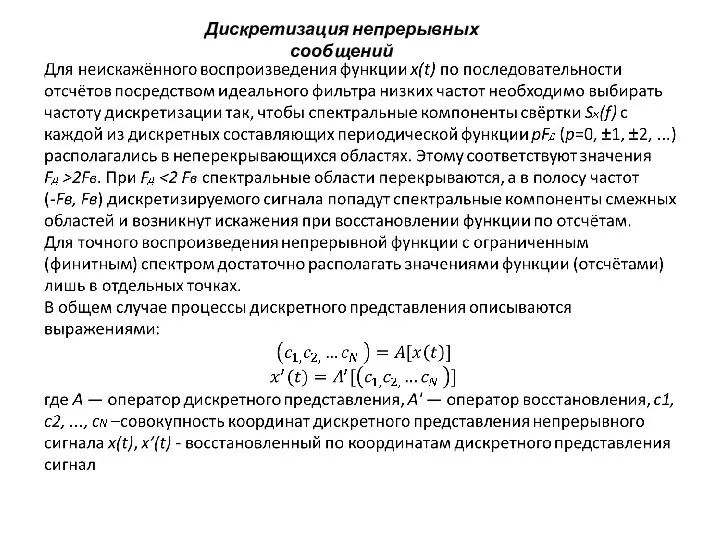
Дискретизация непрерывных сообщений
Под дискретизацией сигналов понимают преобразование функций непрерывных переменных в
Дискретизация непрерывных сообщений
Под дискретизацией сигналов понимают преобразование функций непрерывных переменных в
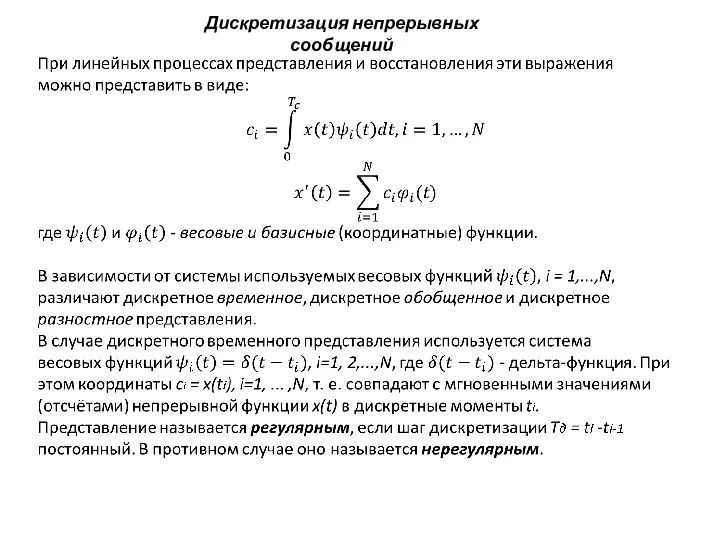
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Процедура дискретизации сводится к образованию произведения дискретизируемой функции x(t)
Дискретизация непрерывных сообщений
Процедура дискретизации сводится к образованию произведения дискретизируемой функции x(t)
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
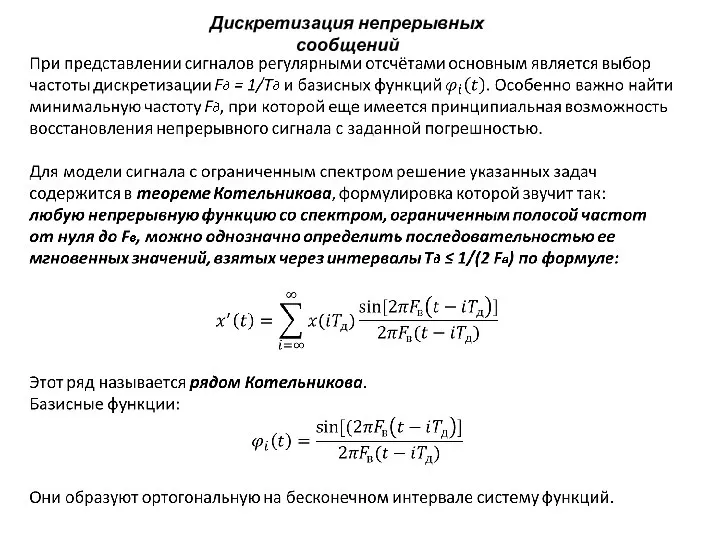
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Фундаментальное значение теоремы Котельникова заключается в том, что она
Дискретизация непрерывных сообщений
Фундаментальное значение теоремы Котельникова заключается в том, что она
Дискретизация непрерывных сообщений
Тем не менее, на практике часто приходится иметь дело
Дискретизация непрерывных сообщений
Тем не менее, на практике часто приходится иметь дело
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Дискретизация непрерывных сообщений
Адаптивная дискретизация непрерывных сообщений
В данном случае координатами являются мгновенные
Дискретизация непрерывных сообщений
Адаптивная дискретизация непрерывных сообщений
В данном случае координатами являются мгновенные
Дискретизация непрерывных сообщений
Отсчеты, позволяющие восстановить непрерывное сообщение на приемной стороне с
Дискретизация непрерывных сообщений
Отсчеты, позволяющие восстановить непрерывное сообщение на приемной стороне с
При адаптивной дискретизации отсчеты передаются в случайные моменты. Поэтому для восстановления
При адаптивной дискретизации отсчеты передаются в случайные моменты. Поэтому для восстановления
Оптимизация устройств и систем приема информации
Задача приёма сигналов состоит в наилучшем
Оптимизация устройств и систем приема информации
Задача приёма сигналов состоит в наилучшем
Оптимизация устройств и систем приема информации
3. Сигнал со случайной амплитудой и
Оптимизация устройств и систем приема информации
3. Сигнал со случайной амплитудой и
Оптимизация устройств и систем приема информации
Условная вероятность правильного обнаружения сигнала
Сигнал передавался
Оптимизация устройств и систем приема информации
Условная вероятность правильного обнаружения сигнала
Сигнал передавался
Оптимизация устройств и систем приема информации
Условная вероятность правильного необнаружения
Сигнал не передавался
Оптимизация устройств и систем приема информации
Условная вероятность правильного необнаружения
Сигнал не передавался
Оптимизация устройств и систем приема информации
Критерий максимума правдоподобия
В этом критерии анализируется
Оптимизация устройств и систем приема информации
Критерий максимума правдоподобия
В этом критерии анализируется
Оптимизация устройств и систем приема информации
Процедура принятия решения, что в смеси
Оптимизация устройств и систем приема информации
Процедура принятия решения, что в смеси
Оптимизация устройств и систем приема информации
Вероятность правильного обнаружения
Критерий максимума правдоподобия используется
Оптимизация устройств и систем приема информации
Вероятность правильного обнаружения
Критерий максимума правдоподобия используется
Оптимизация устройств и систем приема информации
Риск пропуска сигнала определяется выражением
P(1) –
Оптимизация устройств и систем приема информации
Риск пропуска сигнала определяется выражением
P(1) –
Оптимизация устройств и систем приема информации
Критерий Неймана–Пирсона
По заданной величине F по
Оптимизация устройств и систем приема информации
Критерий Неймана–Пирсона
По заданной величине F по
Оптимизация устройств и систем приема информации
Корреляционный прием
Корреляционный (когерентный) приём – это
Оптимизация устройств и систем приема информации
Корреляционный прием
Корреляционный (когерентный) приём – это
Оптимизация устройств и систем приема информации
В пороговом устройстве (ПУ) производится сравнение
Оптимизация устройств и систем приема информации
В пороговом устройстве (ПУ) производится сравнение

Оптимизация устройств и систем приема информации
Оптимизация устройств и систем приема информации
Оптимизация устройств и систем приема информации
Согласованная фильтрация в оптимальных обнаружителях
Импульсная характеристика
Оптимизация устройств и систем приема информации
Согласованная фильтрация в оптимальных обнаружителях
Импульсная характеристика
 Физико-химические свойства металлов
Физико-химические свойства металлов Силы Ампера и Лоренца 11 класс
Силы Ампера и Лоренца 11 класс Ускорение. Единица ускорения
Ускорение. Единица ускорения ПРА и ЭПРА люминесцентных ламп
ПРА и ЭПРА люминесцентных ламп Решение задач
Решение задач Механические колебания и волны
Механические колебания и волны Характеристика машиностроительных и ремонтных предприятий
Характеристика машиностроительных и ремонтных предприятий Ломоносов и Физика Автор презентации ученица 11 «Б» класса ГБОУ СОШ № 1003 ЗАО г. Москвы Акопян Татев Цоваковна В проекте участво
Ломоносов и Физика Автор презентации ученица 11 «Б» класса ГБОУ СОШ № 1003 ЗАО г. Москвы Акопян Татев Цоваковна В проекте участво Распределения молекул
Распределения молекул Параметрические цепи
Параметрические цепи Разборка – сборка кривошипно шатунного механизма двигателей автомобилей ЗИЛ – 508.10, ВАЗ – 2106 и ВАЗ -21083
Разборка – сборка кривошипно шатунного механизма двигателей автомобилей ЗИЛ – 508.10, ВАЗ – 2106 и ВАЗ -21083 Принципы ядерной геохронологии. (Лекция 9)
Принципы ядерной геохронологии. (Лекция 9) Звуковые волны. Скорость звука. (10 класс)
Звуковые волны. Скорость звука. (10 класс) Деформації. Сили пружності
Деформації. Сили пружності Электрическое поле Мясникова Г. И. Учитель физики
Электрическое поле Мясникова Г. И. Учитель физики Физика
Физика Механика
Механика Презентация по физике "Блоки и полиспаст" - скачать
Презентация по физике "Блоки и полиспаст" - скачать  Сообщающиеся сосуды
Сообщающиеся сосуды Термодинамические потенциалы
Термодинамические потенциалы Гальваническое покрытие
Гальваническое покрытие Работа. Механическая Энергия. Кинетическая и потенциальная энергии. Закон сохранения механической энергии
Работа. Механическая Энергия. Кинетическая и потенциальная энергии. Закон сохранения механической энергии Давление газов. Закон Паскаля. Движение молекул газа
Давление газов. Закон Паскаля. Движение молекул газа ИНФРАЗВУК Колебательные процессы с частотами ниже 20 Гц - инфразвуки - не воспринимаются слухом человека.
ИНФРАЗВУК Колебательные процессы с частотами ниже 20 Гц - инфразвуки - не воспринимаются слухом человека. Градуировка спектроскопа
Градуировка спектроскопа Электроемкость конденсатора и энергия электрического поля. (лекция 1б)
Электроемкость конденсатора и энергия электрического поля. (лекция 1б) Презентация Тепловые электростанции
Презентация Тепловые электростанции  Быстрые переключения нелинейных систем
Быстрые переключения нелинейных систем