- Теорія лінійних систем автоматичного керування. Лекція 1

Содержание
- 2. Кредитний модуль «Теорія автоматичного управління - 1» є першою частиною навчальної дисципліни «Теорія автоматичного управління». Ціль
- 3. ОПИС КРЕДИТНОГО МОДУЛЯ ЗАГАЛЬНІ ПОКАЗНИКИ: Цикл базової підготовки. Статус – обов’язковий ХАРАКТЕРИСТИКА КРЕДИТНОГО МОДУЛЯ: Лекції -54
- 4. Рейтингова система оцінювання результатів навчання Рейтинг студента з дисципліни складається з балів, які він отримує за:
- 5. Тема 1.1. Основні поняття та визначення в теорії автоматичного керування ТЕОРІЯ АВТОМАТИЧНОГО КЕРУВАННЯ – розділ технічної
- 6. Загальна характеристика системи автоматичного керування. Визначення системи автоматичного керування. Стан будь-якого технічного об’єкта визначається однією або
- 7. Фактори, які викликають відхилення вихідної величини від потрібного значення 1. Вплив зовнішніх збурень L(t) на об‘єкт,
- 9. Скачать презентацию
Кредитний модуль «Теорія автоматичного управління - 1» є першою частиною
Кредитний модуль «Теорія автоматичного управління - 1» є першою частиною
ОПИС КРЕДИТНОГО МОДУЛЯ
ЗАГАЛЬНІ ПОКАЗНИКИ:
Цикл базової підготовки. Статус – обов’язковий
ХАРАКТЕРИСТИКА КРЕДИТНОГО МОДУЛЯ:
ОПИС КРЕДИТНОГО МОДУЛЯ
ЗАГАЛЬНІ ПОКАЗНИКИ:
Цикл базової підготовки. Статус – обов’язковий
ХАРАКТЕРИСТИКА КРЕДИТНОГО МОДУЛЯ:
Рейтингова система оцінювання результатів навчання
Рейтинг студента з дисципліни складається
Рейтингова система оцінювання результатів навчання
Рейтинг студента з дисципліни складається
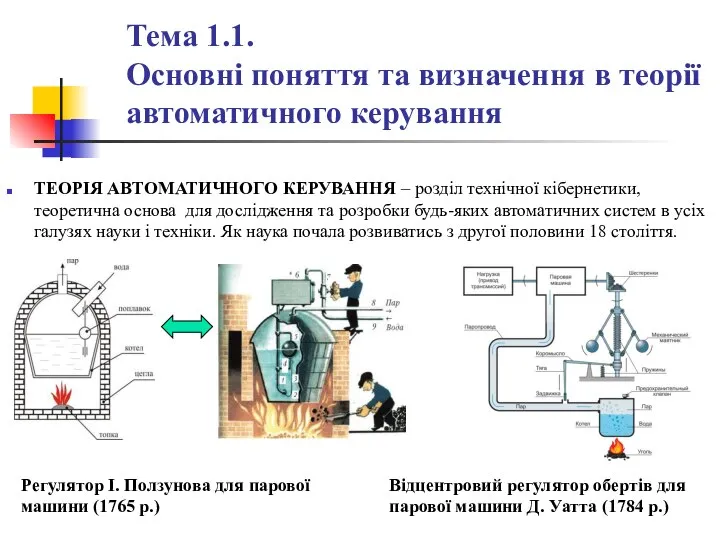
Тема 1.1.
Основні поняття та визначення в теорії автоматичного керування
ТЕОРІЯ АВТОМАТИЧНОГО
Тема 1.1.
Основні поняття та визначення в теорії автоматичного керування
ТЕОРІЯ АВТОМАТИЧНОГО
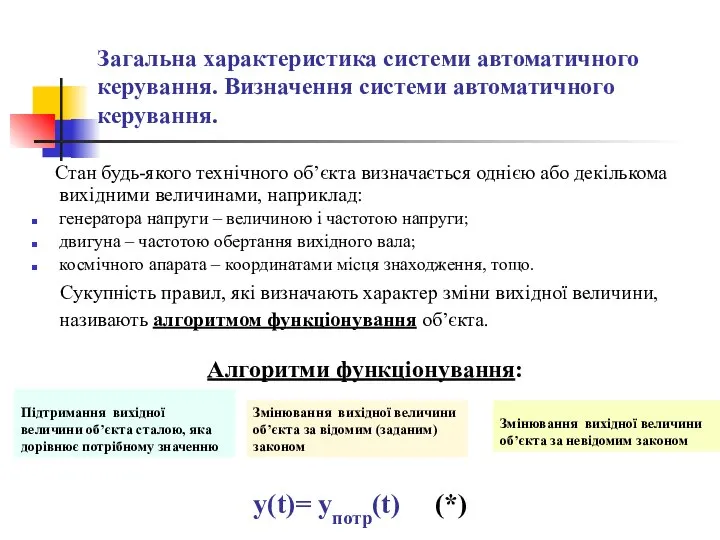
Загальна характеристика системи автоматичного керування. Визначення системи автоматичного керування.
Стан будь-якого
Загальна характеристика системи автоматичного керування. Визначення системи автоматичного керування.
Стан будь-якого
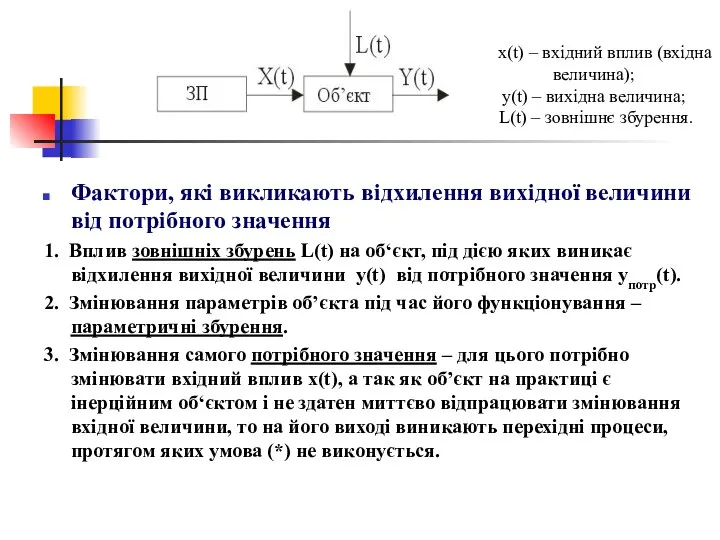
Фактори, які викликають відхилення вихідної величини від потрібного значення
1. Вплив зовнішніх
Фактори, які викликають відхилення вихідної величини від потрібного значення
1. Вплив зовнішніх
 Швейная машина. От создания до использования
Швейная машина. От создания до использования Формулы расчёта оптической силы интраокулярных линз
Формулы расчёта оптической силы интраокулярных линз Презентация по физике "Понятие звука" - скачать
Презентация по физике "Понятие звука" - скачать  Наблюдения и опыты. Задачи физики
Наблюдения и опыты. Задачи физики Лазеры (или идеал, который создал человек)
Лазеры (или идеал, который создал человек) Feedback loops
Feedback loops Электричество. Электростатика
Электричество. Электростатика Роль твердой фазы в формировании осадков. Рост ледяной фазы.Тема 5 2013
Роль твердой фазы в формировании осадков. Рост ледяной фазы.Тема 5 2013 Поляризация механических волн. Колебания и волны
Поляризация механических волн. Колебания и волны Основные понятия физики
Основные понятия физики Закон всемирного тяготения
Закон всемирного тяготения Анализ и расчёт магнитных цепей
Анализ и расчёт магнитных цепей Литр
Литр Спектроскоп. Спектр түрлері
Спектроскоп. Спектр түрлері "Всё для фронта, всё для победы!" Вклад отечественной физики в Великую Победу
"Всё для фронта, всё для победы!" Вклад отечественной физики в Великую Победу Автоматический очиститель обуви
Автоматический очиститель обуви Механизмы уширения линий. Теория излучения. (Тема 12)
Механизмы уширения линий. Теория излучения. (Тема 12) Презентация по физике "Влажность Способы измерения влажности" - скачать
Презентация по физике "Влажность Способы измерения влажности" - скачать  Тема: Взаємодія тіл. «Виштовхувальна сила. Закон Архімеда»
Тема: Взаємодія тіл. «Виштовхувальна сила. Закон Архімеда» Сенин В.Г., МОУ «СОШ №4», г. Корсаков
Сенин В.Г., МОУ «СОШ №4», г. Корсаков  Изучение микроструктуры процессов релаксации в плазме
Изучение микроструктуры процессов релаксации в плазме Волновая оптика. Интерференция волн от двух точечных источников
Волновая оптика. Интерференция волн от двух точечных источников Развитие теоретических принципов лазерной техники. Вклад А.М. Прохорова и Н.Г. Басова
Развитие теоретических принципов лазерной техники. Вклад А.М. Прохорова и Н.Г. Басова История проекторов
История проекторов Тензоры. Природа и свойства тензоров
Тензоры. Природа и свойства тензоров Основы МРТ
Основы МРТ Динамика вращательного движения. (Тема 3)
Динамика вращательного движения. (Тема 3) Тепломассообмен. Сложный теплообмен
Тепломассообмен. Сложный теплообмен