- Теорія механізмів робототехнічних систем. Кінематика

Содержание
- 2. Теоретичні відомості Теорія механізмів робототехнічних систем - це наука, що вивчає засоби проектування роботів і робототехнічних
- 3. Лекція 1 Промислові роботи
- 4. Призначення промислового роботу. Призначення промислового робота - самостійно працювати з інструментом, заготівлею і матеріалами для автоматизації
- 5. Основні конструктивні елементи ПР Станина, стояк чи корпус, опора - це ланка, до якої кріпяться рухомо
- 6. Маніпулятор - це керуємий пристрій для виконання рухомих функцій, аналогічних функціям руки людини при переміщенні об'єктів
- 7. ЛАНКИ Усі механізми складаються з ланок. Ланками називаються тверді тіла, з яких утворюється механізм [1]. При
- 8. КІНЕМАТИЧНА СХЕМА РОБОТА КОПІЮВАЛЬНИКА Дволанковий маніпулятор
- 9. Ступені свободи Кінематичні пари класифікують по числу мір свободин і по числу умов зв'язку S, що
- 10. Класи кінематичних пар
- 11. Роль кінематичної пари може виконувати кінематичне з'єднання.
- 12. Кінематичні ланцюги Плоскі незамкнутий складний замкнутий простий
- 13. НАЙПРОСТІШІ МЕХАНІЗМИ 1. Кривошпно-повзунний 2. Шарнирний чотириланник 3.Кулісний механізм. 4. Зубчасті передачі 5. Кулачкові механізми 6.
- 14. Кривошипно-повзунний механізм - один з самих розповсюджених.
- 15. Шарнірний чотириланник Схема Схема двохкоромислового параллелограмного механізму портального механізму крану зі стрілою
- 16. Кулісний механізм Служить для перетворення одного виду обертального руху до іншого. Кулісою звичайно називають ланку з
- 17. Схема гидроприводу, в якому циліндр з поршнем замінює кулісний камінь
- 19. Кулачкові механізми
- 20. Схеми найчастiше застосовуваних кулачкових механізмiв
- 21. Найважливіші означення, що зустрічаються під час аналізу і синтезу кулачкових механізмів ϕв - фазовий кут віддалення
- 22. Сума фазових кутів дорівнює 360°: ϕв + ϕв.п. + ϕнаб + ϕн.п. = 360°. Відповідні інтервали
- 23. Види робітничих органів, схопи маніпуляторів Двохпальцевий схоп Трьохпальцевий схоп
- 24. Приводи ПР Гідроприводи, що забезпечують поступовий і обертальний рухи ланок
- 25. Гідравличні приводи найбільш часто застосовуються. Достоінства: - висока швидкодія; - забезпечення стабільності швидкості переміщення вантажу; -
- 26. Пневматичний привід аналогічний гідравличному. У ньому основний елемент - пневмоциліндр, де поршень пересувається під чинністю стислого
- 27. Електроприводи все ширше використовується у робототехніці. Їми добре керувати, вони зручні в експлуатації, мають високий К.
- 28. Системи управління ПР Згідно з назвами ґенерацій роботів розрізняють наступні прилади управління ПР: програмні (I ґенерація
- 29. Основні характеристики ПР Маневреність визначається як число мір свободи механізму при непорушному (фіксованому) становищі охоплення, підведенного
- 30. Класифікація ПР По признаку спеціалізації: спеціалізовані і універсальні. По типу технологічної операції: основні і допоміжні. По
- 31. Лекція 2 СТРУКТУРНИЙ АНАЛІЗ ПЛОСКИХ МЕХАНІЗМІВ
- 32. Структура просторового кінематичного ланцюга. Структурна формула. Нехай число кінематичних пар в ланцюзі I-ого класу є Р1,
- 33. Визначимо число мір свободи механізму робота "Версатран". Його кінематична схема представлена на рисунку. Механізм має 5
- 34. Структурна формула плоских механізмів та ланцюгів Плоский механізм - це теж кінематичний ланцюг, що одною ланкою
- 35. Перерахуємо нижчі кінематичні пари з однією мірою свободи ( Н = 1; S = 2). Тут
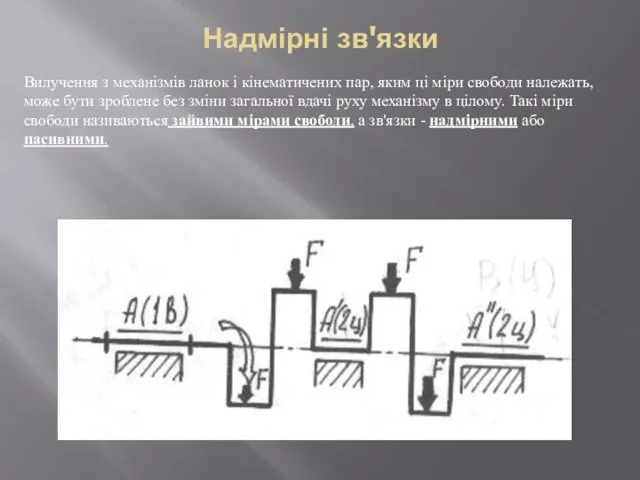
- 36. Надмірні зв'язки Вилучення з механізмів ланок і кінематичених пар, яким ці міри свободи належать, може бути
- 37. В механізмі поперечно-строгального верстату введена "зайва" з точки зору забезпечення руху поступова кінематична пара між ланками
- 38. Прикладом механізму з надмірними зв'язками є механізм подвійного паралелограма. Без всякого порушення характеру руху можна ланки
- 39. Конструкторські методи заміни статично невизначених механізмів При qi = 0 зборка відбувається без деформування ланок. Механізм
- 40. Структура механізмів по Л. В. Ассуру. Класи структурних груп і клас механізмів Узагальнювальними координатами механізму називають
- 41. Умови складання груп Ассура p2 = 3 / 2 k.
- 42. Структурні групи за видами
- 43. Правила складання структурних схем: Структурна схема будується не в масштабі; Поступальні пари замінюються обертальними; Ланки, з'єднані
- 44. Заміна вищих кінематичних пар При вивченні структури кінематичних плоских механізмів в багатьох випадках зручно замінювати вищі
- 45. Розглянемо механізм, показаний на рисунку. Визначимо міру рухомості механізму як плоского W = 3 ⋅ 3
- 46. Лекція 3 КІНЕМАТИЧНИЙ АНАЛІЗ
- 47. Задачі кінематичного аналізу Кінематичний аналіз механізмів має своєю суттю визначення руху усіх ланок по заданому русі
- 52. Кінематика вхідних і вихідних ланок, передатні функції механізму Будь-який механізм призначений для перетворення руху вхідної ланки
- 53. Звичайний рух вихідних і проміжних ланок визначається у два етапи: на першому етапі встановлюються залежності кінематичних
- 54. Аналоги швидкостей і прискорень При кінематичному дослідженні механізмів швидкості та прискорення ланок та точок, які їм
- 55. Аналогічно можуть бути отримані рівняння для швидкості та прискорення будь-якої точки m ланки k. Нехай rm
- 56. У рівнянні (3.3.4) ω і 1 —кутове і прискорення початкової ланки. Величини і , які входять
- 57. Якщо початкова ланка обертається з постійною кутовою швидкістю , то її кутове прискорення ε1 дорівнює нулю,
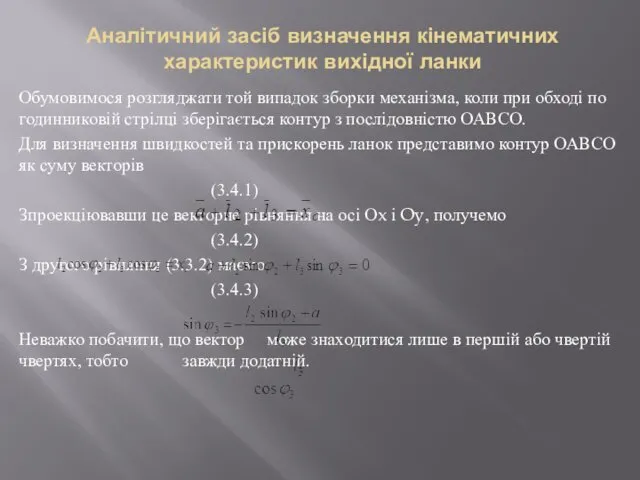
- 60. Аналітичний засіб визначення кінематичних характеристик вихідної ланки Обумовимося розгляджати той випадок зборки механізма, коли при обході
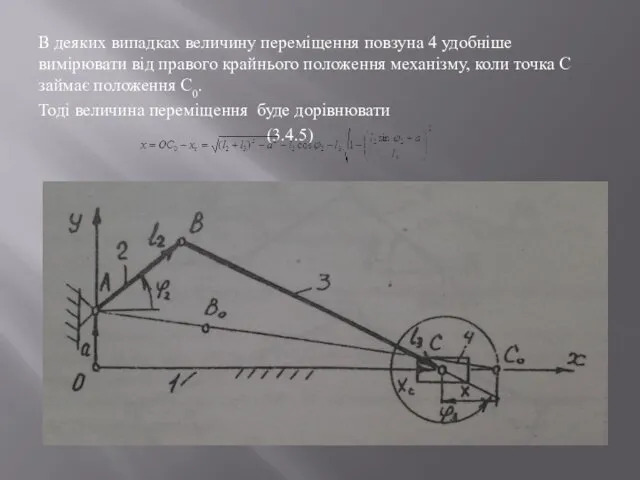
- 61. В деяких випадках величину переміщення повзуна 4 удобніше вимірювати від правого крайнього положення механізму, коли точка
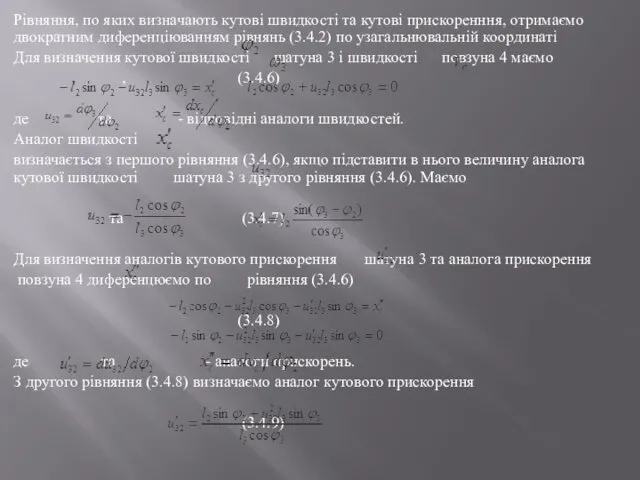
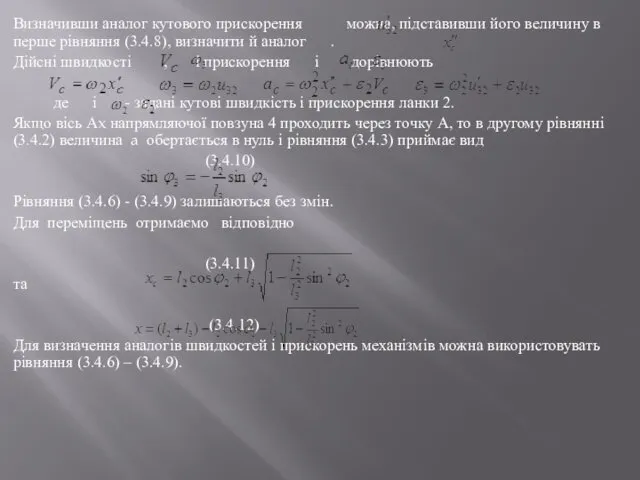
- 62. Рівняння, по яких визначають кутові швидкості та кутові прискоренння, отримаємо двократним диференціюванням рівнянь (3.4.2) по узагальнювальній
- 63. Визначивши аналог кутового прискорення можна, підставивши його величину в перше рівняння (3.4.8), визначити й аналог .
- 66. Скачать презентацию
Теоретичні відомості
Теорія механізмів робототехнічних систем - це наука, що вивчає засоби
Теоретичні відомості
Теорія механізмів робототехнічних систем - це наука, що вивчає засоби
Лекція 1
Промислові роботи
Лекція 1
Промислові роботи

Призначення промислового роботу.
Призначення промислового робота - самостійно працювати з інструментом,
Призначення промислового роботу.
Призначення промислового робота - самостійно працювати з інструментом,

Основні конструктивні елементи ПР
Станина, стояк чи корпус, опора - це ланка,
Основні конструктивні елементи ПР
Станина, стояк чи корпус, опора - це ланка,
Маніпулятор - це керуємий пристрій для виконання рухомих функцій, аналогічних функціям
Маніпулятор - це керуємий пристрій для виконання рухомих функцій, аналогічних функціям
ЛАНКИ
Усі механізми складаються з ланок.
Ланками називаються тверді тіла, з яких утворюється
ЛАНКИ
Усі механізми складаються з ланок.
Ланками називаються тверді тіла, з яких утворюється

КІНЕМАТИЧНА СХЕМА РОБОТА КОПІЮВАЛЬНИКА
Дволанковий маніпулятор
КІНЕМАТИЧНА СХЕМА РОБОТА КОПІЮВАЛЬНИКА
Дволанковий маніпулятор
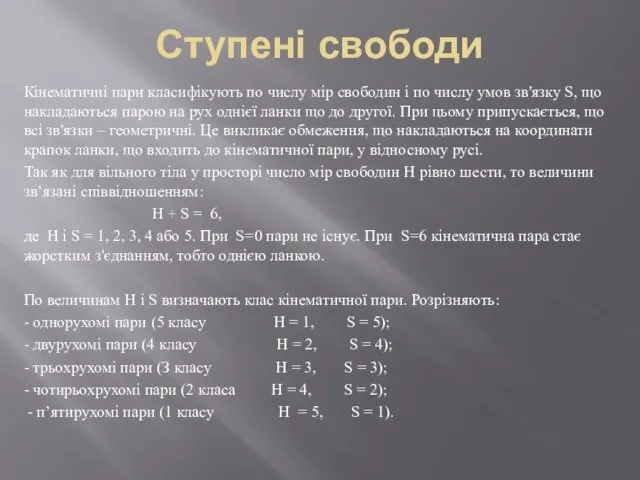
Ступені свободи
Кінематичні пари класифікують по числу мір свободин і по числу
Ступені свободи
Кінематичні пари класифікують по числу мір свободин і по числу

Класи кінематичних пар
Класи кінематичних пар

Роль кінематичної пари може виконувати кінематичне з'єднання.
Роль кінематичної пари може виконувати кінематичне з'єднання.
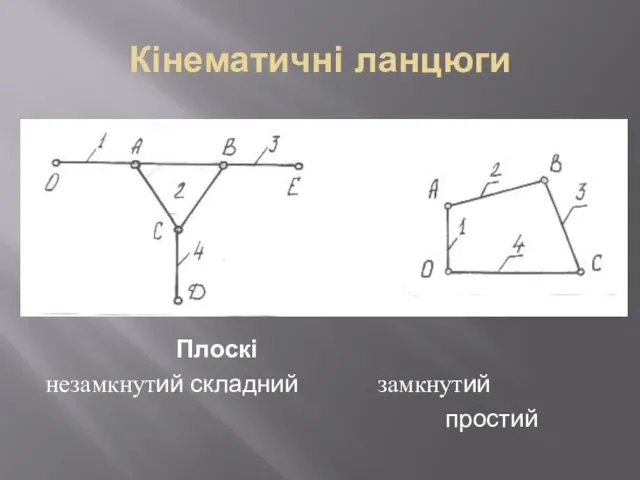
Кінематичні ланцюги
Плоскі
незамкнутий складний замкнутий
простий
Кінематичні ланцюги
Плоскі
незамкнутий складний замкнутий
простий
НАЙПРОСТІШІ МЕХАНІЗМИ
1. Кривошпно-повзунний
2. Шарнирний чотириланник
3.Кулісний механізм.
4. Зубчасті передачі
5. Кулачкові механізми
6. Мальтійський
НАЙПРОСТІШІ МЕХАНІЗМИ
1. Кривошпно-повзунний
2. Шарнирний чотириланник
3.Кулісний механізм.
4. Зубчасті передачі
5. Кулачкові механізми
6. Мальтійський
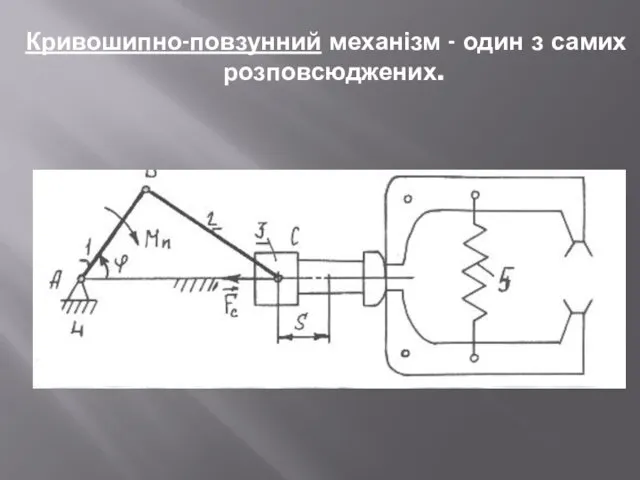
Кривошипно-повзунний механізм - один з самих розповсюджених.
Кривошипно-повзунний механізм - один з самих розповсюджених.
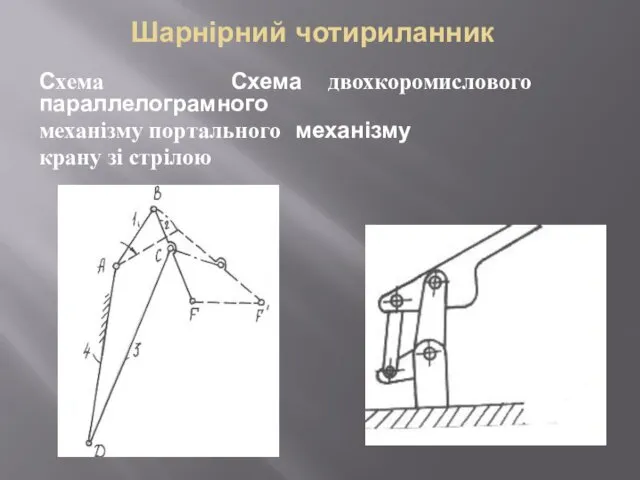
Шарнірний чотириланник
Схема Схема двохкоромислового параллелограмного
механізму портального механізму
крану зі стрілою
Шарнірний чотириланник
Схема Схема двохкоромислового параллелограмного
механізму портального механізму
крану зі стрілою
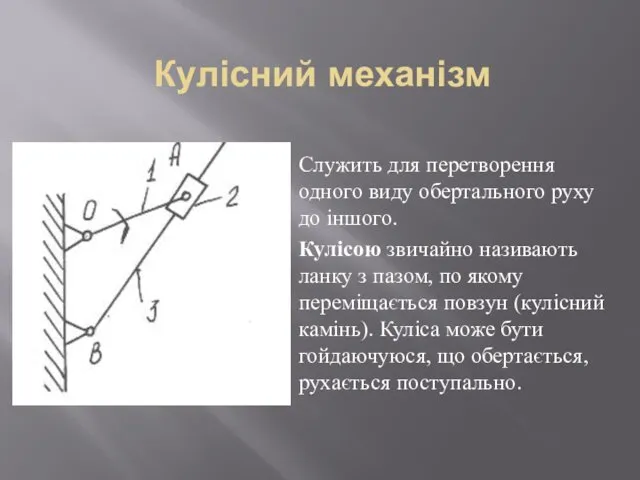
Кулісний механізм
Служить для перетворення одного виду обертального руху до іншого.
Кулісою
Кулісний механізм
Служить для перетворення одного виду обертального руху до іншого.
Кулісою
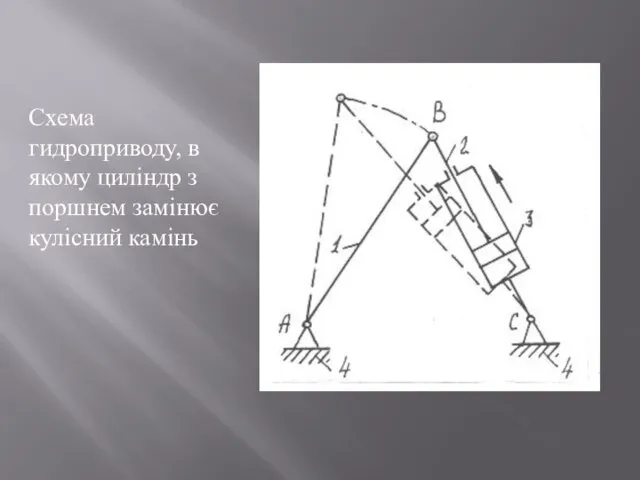
Схема гидроприводу, в якому циліндр з поршнем замінює кулісний камінь
Схема гидроприводу, в якому циліндр з поршнем замінює кулісний камінь
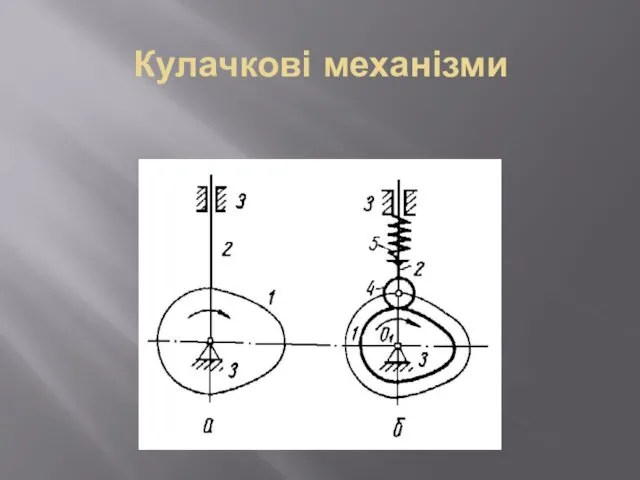
Кулачкові механізми
Кулачкові механізми
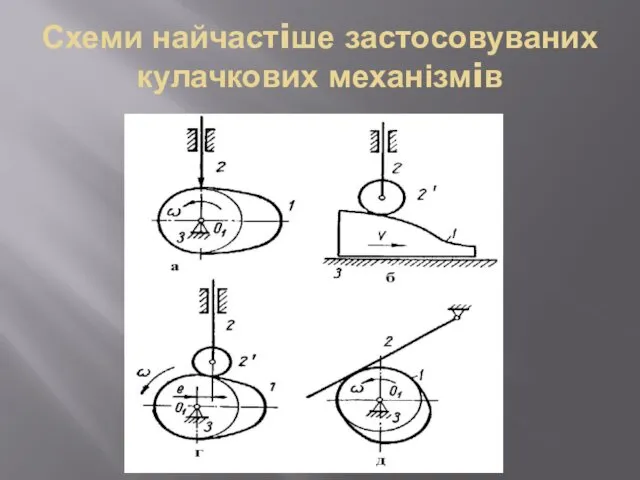
Схеми найчастiше застосовуваних кулачкових механізмiв
Схеми найчастiше застосовуваних кулачкових механізмiв
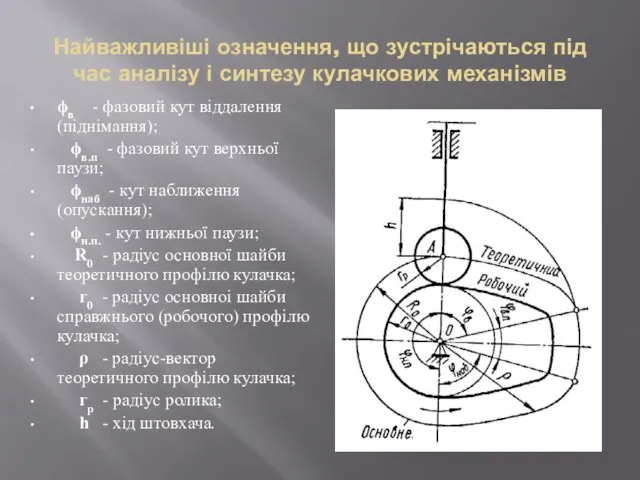
Найважливіші означення, що зустрічаються під час аналізу і синтезу кулачкових механізмів
ϕв
Найважливіші означення, що зустрічаються під час аналізу і синтезу кулачкових механізмів
ϕв
Сума фазових кутів дорівнює 360°:
ϕв + ϕв.п. + ϕнаб +
Сума фазових кутів дорівнює 360°:
ϕв + ϕв.п. + ϕнаб +
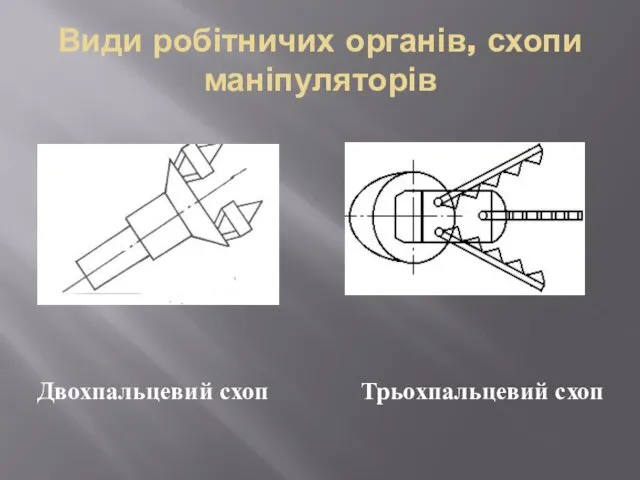
Види робітничих органів, схопи маніпуляторів
Двохпальцевий схоп Трьохпальцевий схоп
Види робітничих органів, схопи маніпуляторів
Двохпальцевий схоп Трьохпальцевий схоп
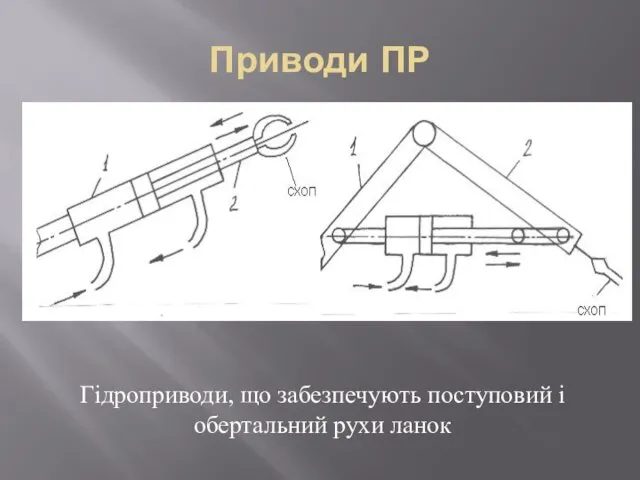
Приводи ПР
Гідроприводи, що забезпечують поступовий і обертальний рухи ланок
Приводи ПР
Гідроприводи, що забезпечують поступовий і обертальний рухи ланок
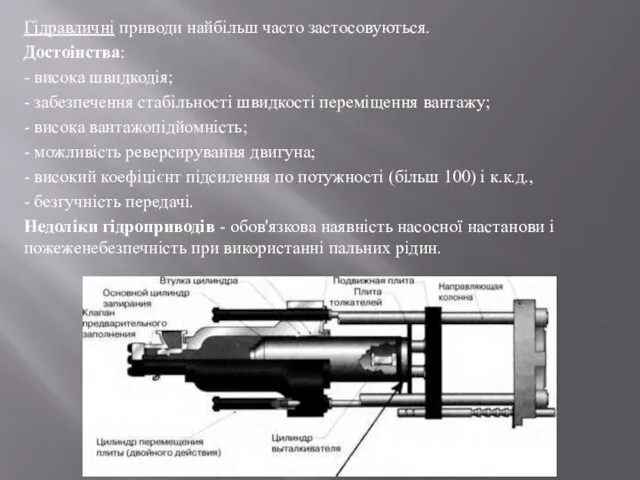
Гідравличні приводи найбільш часто застосовуються.
Достоінства:
- висока швидкодія;
- забезпечення стабільності швидкості
Гідравличні приводи найбільш часто застосовуються.
Достоінства:
- висока швидкодія;
- забезпечення стабільності швидкості
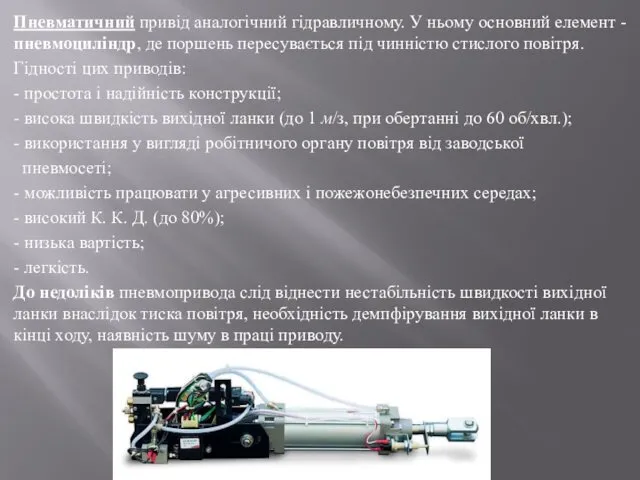
Пневматичний привід аналогічний гідравличному. У ньому основний елемент - пневмоциліндр, де
Пневматичний привід аналогічний гідравличному. У ньому основний елемент - пневмоциліндр, де
Електроприводи все ширше використовується у робототехніці. Їми добре керувати, вони зручні
Електроприводи все ширше використовується у робототехніці. Їми добре керувати, вони зручні
Системи управління ПР
Згідно з назвами ґенерацій роботів розрізняють наступні прилади управління
Системи управління ПР
Згідно з назвами ґенерацій роботів розрізняють наступні прилади управління
Основні характеристики ПР
Маневреність визначається як число мір свободи механізму при непорушному
Основні характеристики ПР
Маневреність визначається як число мір свободи механізму при непорушному
Класифікація ПР
По признаку спеціалізації:
спеціалізовані і універсальні.
По типу технологічної операції:
основні
Класифікація ПР
По признаку спеціалізації:
спеціалізовані і універсальні.
По типу технологічної операції:
основні
Лекція 2
СТРУКТУРНИЙ
АНАЛІЗ
ПЛОСКИХ МЕХАНІЗМІВ
Лекція 2
СТРУКТУРНИЙ
АНАЛІЗ
ПЛОСКИХ МЕХАНІЗМІВ
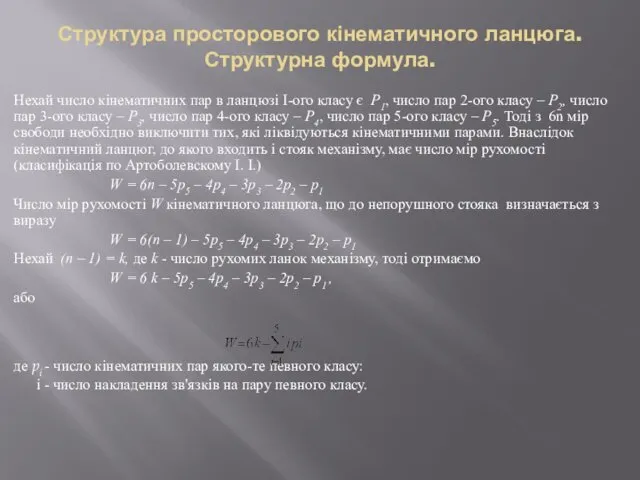
Структура просторового кінематичного ланцюга.
Структурна формула.
Нехай число кінематичних пар в ланцюзі I-ого
Структура просторового кінематичного ланцюга.
Структурна формула.
Нехай число кінематичних пар в ланцюзі I-ого
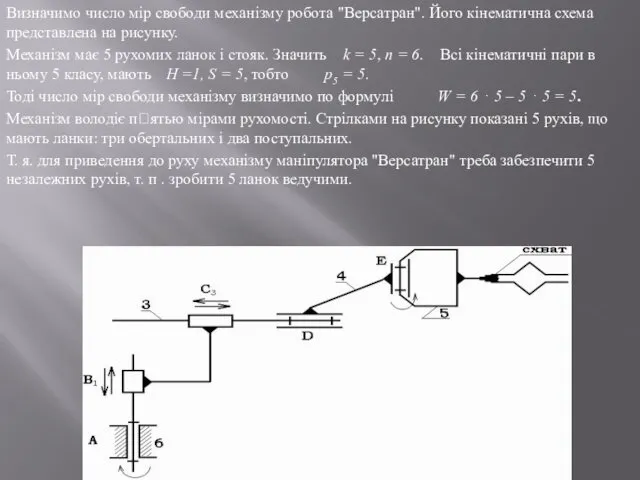
Визначимо число мір свободи механізму робота "Версатран". Його кінематична схема представлена
Визначимо число мір свободи механізму робота "Версатран". Його кінематична схема представлена
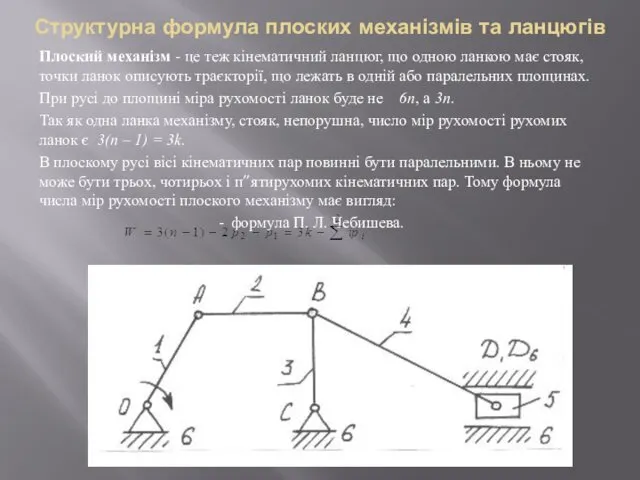
Структурна формула плоских механізмів та ланцюгів
Плоский механізм - це теж кінематичний
Структурна формула плоских механізмів та ланцюгів
Плоский механізм - це теж кінематичний
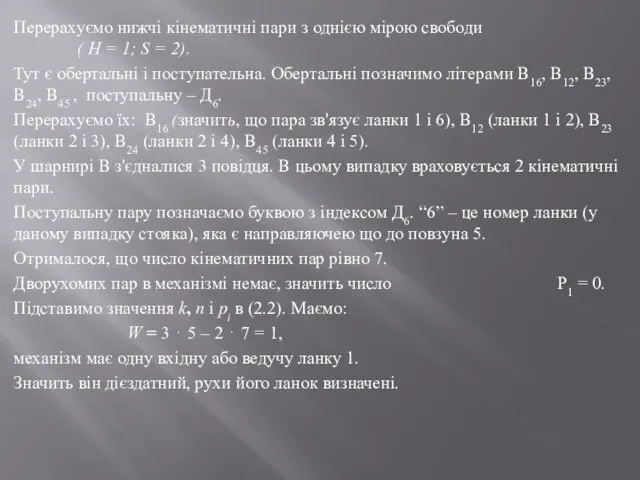
Перерахуємо нижчі кінематичні пари з однією мірою свободи ( Н =
Перерахуємо нижчі кінематичні пари з однією мірою свободи ( Н =
Надмірні зв'язки
Вилучення з механізмів ланок і кінематичених пар, яким ці міри
Надмірні зв'язки
Вилучення з механізмів ланок і кінематичених пар, яким ці міри
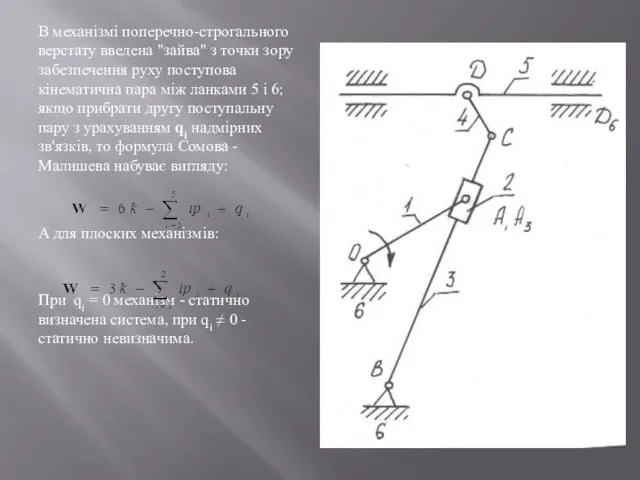
В механізмі поперечно-строгального верстату введена "зайва" з точки зору забезпечення руху
В механізмі поперечно-строгального верстату введена "зайва" з точки зору забезпечення руху
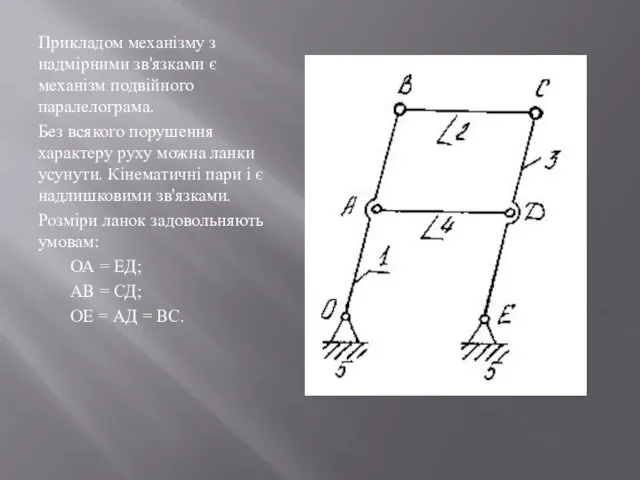
Прикладом механізму з надмірними зв'язками є механізм подвійного паралелограма.
Без всякого порушення
Прикладом механізму з надмірними зв'язками є механізм подвійного паралелограма.
Без всякого порушення
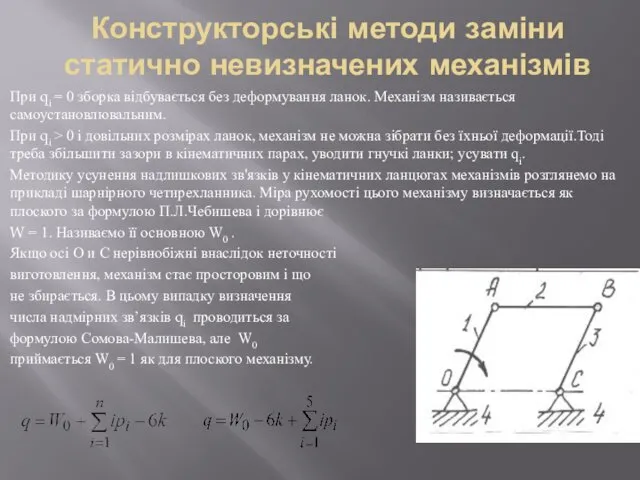
Конструкторські методи заміни статично невизначених механізмів
При qi = 0 зборка відбувається
Конструкторські методи заміни статично невизначених механізмів
При qi = 0 зборка відбувається
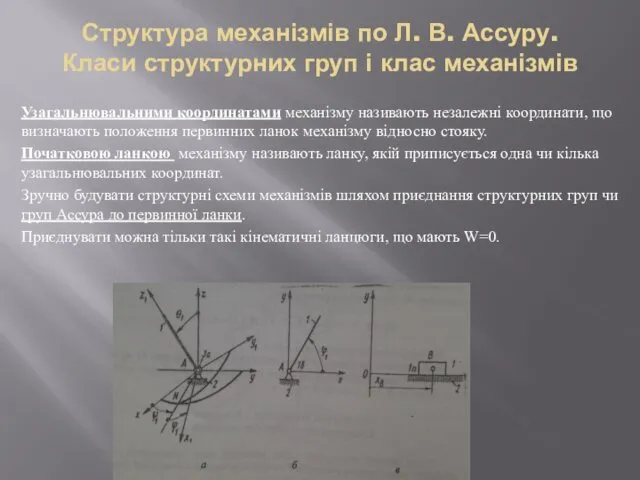
Структура механізмів по Л. В. Ассуру.
Класи структурних груп і клас
Структура механізмів по Л. В. Ассуру. Класи структурних груп і клас
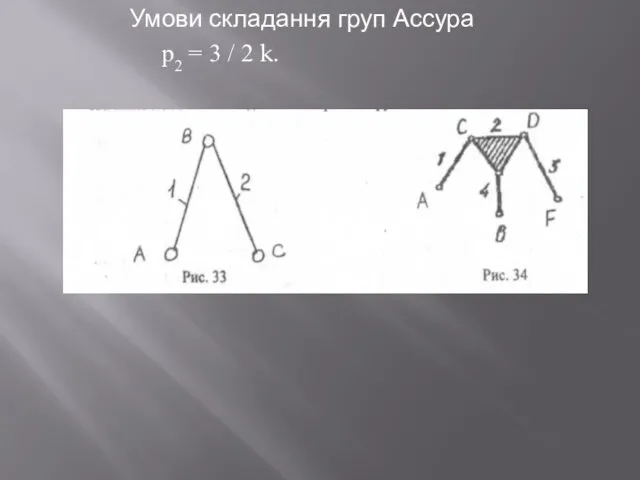
Умови складання груп Ассура
p2 = 3 / 2 k.
Умови складання груп Ассура
p2 = 3 / 2 k.
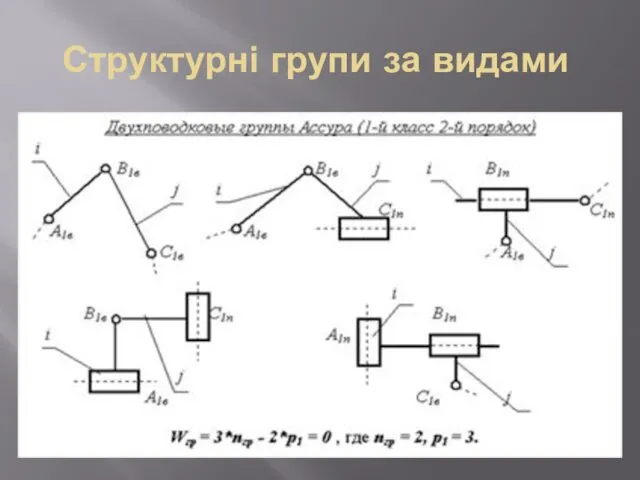
Структурні групи за видами
Структурні групи за видами
Правила складання структурних схем:
Структурна схема будується не в масштабі;
Поступальні пари замінюються
Правила складання структурних схем:
Структурна схема будується не в масштабі;
Поступальні пари замінюються
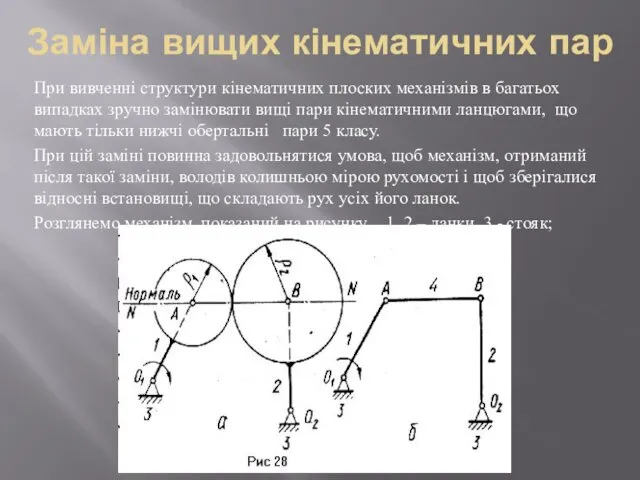
Заміна вищих кінематичних пар
При вивченні структури кінематичних плоских механізмів в багатьох
Заміна вищих кінематичних пар
При вивченні структури кінематичних плоских механізмів в багатьох
Розглянемо механізм, показаний на рисунку.
Визначимо міру рухомості механізму як плоского W
Розглянемо механізм, показаний на рисунку.
Визначимо міру рухомості механізму як плоского W
Лекція 3
КІНЕМАТИЧНИЙ АНАЛІЗ
Лекція 3
КІНЕМАТИЧНИЙ АНАЛІЗ
Задачі кінематичного аналізу
Кінематичний аналіз механізмів має своєю суттю визначення руху усіх
Задачі кінематичного аналізу
Кінематичний аналіз механізмів має своєю суттю визначення руху усіх
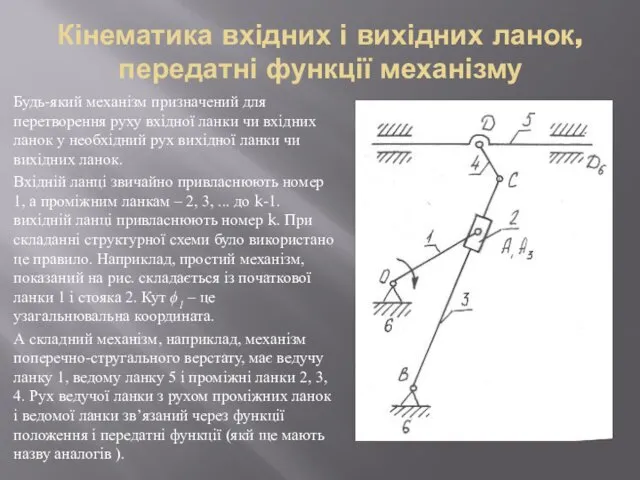
Кінематика вхідних і вихідних ланок, передатні функції механізму
Будь-який механізм призначений для
Кінематика вхідних і вихідних ланок, передатні функції механізму
Будь-який механізм призначений для
Звичайний рух вихідних і проміжних ланок визначається у два етапи:
на першому
Звичайний рух вихідних і проміжних ланок визначається у два етапи:
на першому
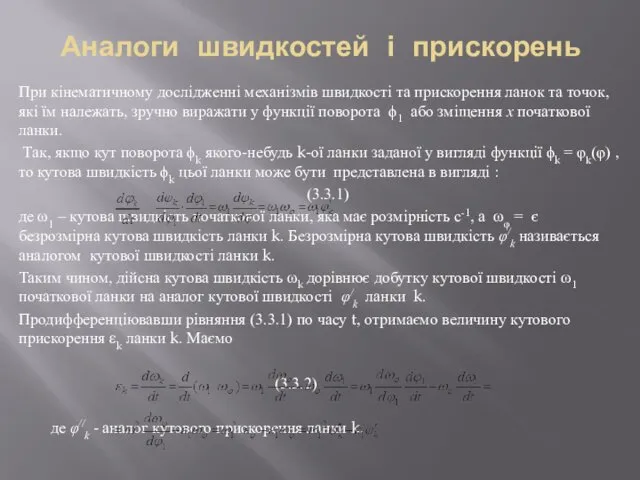
Аналоги швидкостей і прискорень
При кінематичному дослідженні механізмів швидкості та прискорення ланок
Аналоги швидкостей і прискорень
При кінематичному дослідженні механізмів швидкості та прискорення ланок
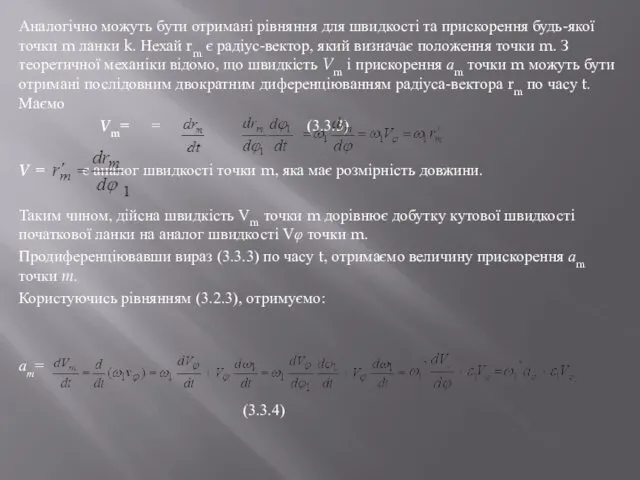
Аналогічно можуть бути отримані рівняння для швидкості та прискорення будь-якої точки
Аналогічно можуть бути отримані рівняння для швидкості та прискорення будь-якої точки
У рівнянні (3.3.4) ω і 1 —кутове і прискорення початкової ланки.
У рівнянні (3.3.4) ω і 1 —кутове і прискорення початкової ланки.
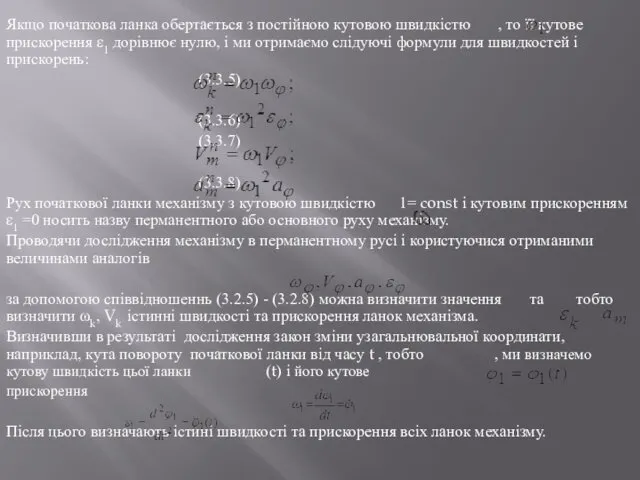
Якщо початкова ланка обертається з постійною кутовою швидкістю , то її
Якщо початкова ланка обертається з постійною кутовою швидкістю , то її
Аналітичний засіб визначення кінематичних характеристик вихідної ланки
Обумовимося розгляджати той випадок зборки
Аналітичний засіб визначення кінематичних характеристик вихідної ланки
Обумовимося розгляджати той випадок зборки
В деяких випадках величину переміщення повзуна 4 удобніше вимірювати від правого
В деяких випадках величину переміщення повзуна 4 удобніше вимірювати від правого
Рівняння, по яких визначають кутові швидкості та кутові прискоренння, отримаємо двократним
Рівняння, по яких визначають кутові швидкості та кутові прискоренння, отримаємо двократним
Визначивши аналог кутового прискорення можна, підставивши його величину в перше рівняння
Визначивши аналог кутового прискорення можна, підставивши його величину в перше рівняння
 Спектр. Спектральный анализ
Спектр. Спектральный анализ Тірі ағзаға электр және магнит өрістерінің әсері. ЯМР және ЭПР құбылыстарды медицинада қолдану
Тірі ағзаға электр және магнит өрістерінің әсері. ЯМР және ЭПР құбылыстарды медицинада қолдану Люменисцентті және электронды микроскопия
Люменисцентті және электронды микроскопия Потенциал электростатического поля. Разность потенциалов
Потенциал электростатического поля. Разность потенциалов Действие электрического тока на человека
Действие электрического тока на человека Крокова напруга
Крокова напруга Линзы. Построение изображений в линзах
Линзы. Построение изображений в линзах  Распределение молекул газа по скоростям.
Распределение молекул газа по скоростям.  Типовой расчет №3. Молекулярная физика и термодинамика
Типовой расчет №3. Молекулярная физика и термодинамика Разработка технологического процесса изготовления детали вал-шестерня в составе редуктора привода цепного конвейера
Разработка технологического процесса изготовления детали вал-шестерня в составе редуктора привода цепного конвейера Измерение углов призм и клиньев на гониометре и оптической скамье. Измерение погрешностей прямоугольных призм
Измерение углов призм и клиньев на гониометре и оптической скамье. Измерение погрешностей прямоугольных призм Molecular-kinetic theory of ideal gases. The molecular basis of thermal physics. Lecture 5
Molecular-kinetic theory of ideal gases. The molecular basis of thermal physics. Lecture 5 Смотр-конкурс профессионального педагогического мастерства работников учебных центров ОАО РЖД
Смотр-конкурс профессионального педагогического мастерства работников учебных центров ОАО РЖД Охлаждение (нагревание) тела конвекцией
Охлаждение (нагревание) тела конвекцией Покорение вершины знаний
Покорение вершины знаний Температура - степень нагретости тела
Температура - степень нагретости тела Пособие по физике для подготовки к практическим работам по разделам: «Механика», «Основы МКТ», «Электродинамика» для студентов
Пособие по физике для подготовки к практическим работам по разделам: «Механика», «Основы МКТ», «Электродинамика» для студентов Проводники в электрическом поле
Проводники в электрическом поле Live in space
Live in space электродинамика Лекция 10
электродинамика Лекция 10  Презентация по физике "Электрофизические свойства радиоматериалов" - скачать бесплатно
Презентация по физике "Электрофизические свойства радиоматериалов" - скачать бесплатно Световые кванты
Световые кванты  Презентация по теме: “Градус Цельсия”. 1.ОТКРЫТИЕ ПЕРВОГО ТЕРМОМЕТРА. 2. АНДЕРС ЦЕЛЬСИЙ. БИОГРАФИЯ. 3.ШКАЛА ЦЕЛЬСИЯ
Презентация по теме: “Градус Цельсия”. 1.ОТКРЫТИЕ ПЕРВОГО ТЕРМОМЕТРА. 2. АНДЕРС ЦЕЛЬСИЙ. БИОГРАФИЯ. 3.ШКАЛА ЦЕЛЬСИЯ  Физический эксперимент
Физический эксперимент Понятие о равновесии фаз
Понятие о равновесии фаз Взаимное притяжение и отталкивание молекул
Взаимное притяжение и отталкивание молекул Самоиндукция. Индуктивность
Самоиндукция. Индуктивность Установки водяного спринклерного пожаротушения
Установки водяного спринклерного пожаротушения