- Навигация, навигационная гидрометеорология и лоция

Содержание
- 2. Основные точки, линии и плоскости на поверхности Земли Земная ось – воображаемая прямая, вокруг которой Земля
- 3. Основные точки, линии и плоскости на поверхности Земли Плоскости параллелей – плоскости, параллельные плоскости экватора. Параллели
- 4. Географические координаты. Разности широт и долгот Географическая широта – угол при центре Земли между плоскостью экватора
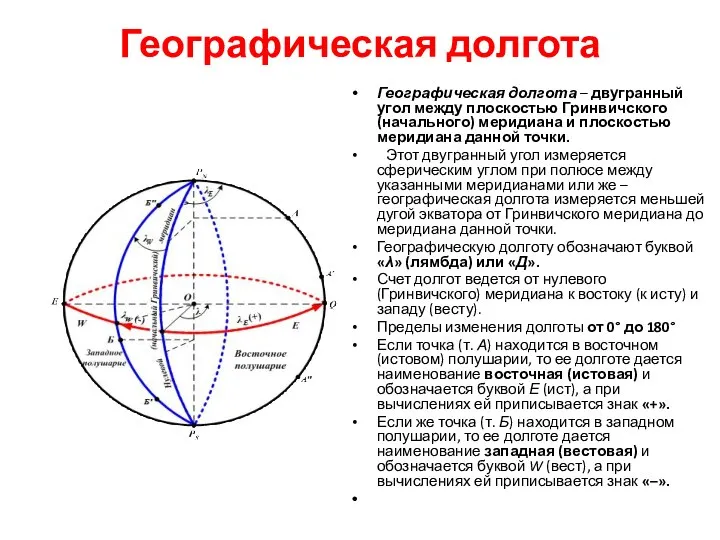
- 5. Географическая долгота Географическая долгота – двугранный угол между плоскостью Гринвичского (начального) меридиана и плоскостью меридиана данной
- 6. Разность широт Изменение широты (ϕ), при переходе судна из одного пункта в другой будет называться разностью
- 7. Разность долгот Разностью долгот называется изменение долготы (λ) при переходе судна из одного пункта в другой
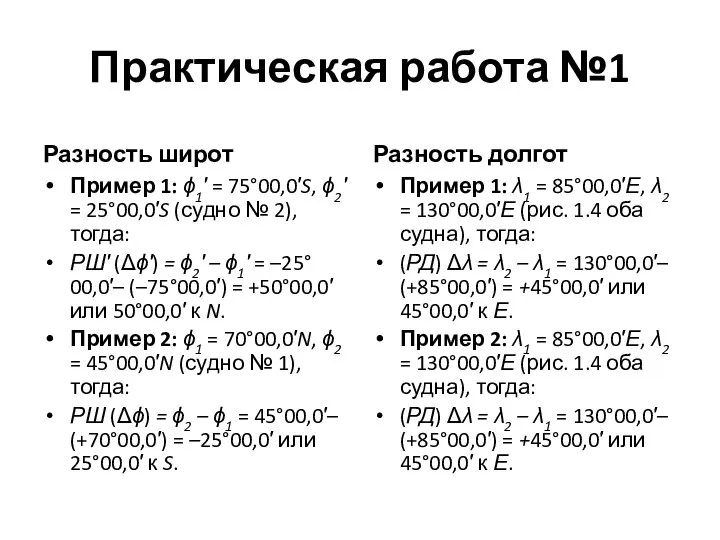
- 8. Практическая работа №1 Разность широт Пример 1: ϕ1′ = 75°00,0′S, ϕ2′ = 25°00,0′S (судно № 2),
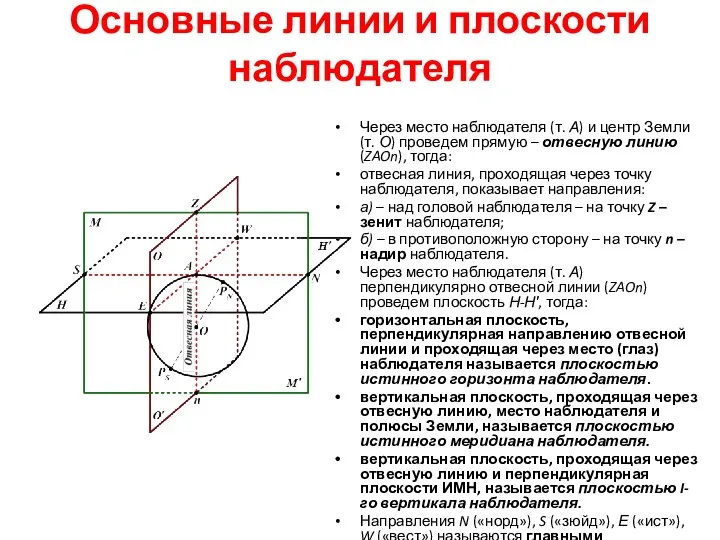
- 9. Основные линии и плоскости наблюдателя Через место наблюдателя (т. А) и центр Земли (т. О) проведем
- 10. Системы счета направлений Круговая система счета направлений Наблюдатель (т. А) – в центре. Тогда направления: на
- 11. Системы счета направлений Четвертая система счета направлений т.1 10°NE; 10°SE; т.3 30°SW; 70°NW. Румбовая система счета
- 12. Истинные направления и их соотношения Истинный курс судна есть направление продольной оси судна, измеряемое горизонтальным углом
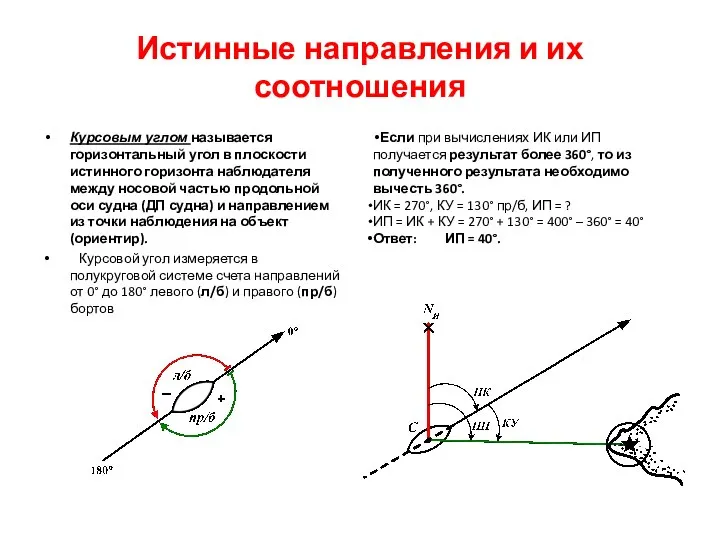
- 13. Истинные направления и их соотношения Курсовым углом называется горизонтальный угол в плоскости истинного горизонта наблюдателя между
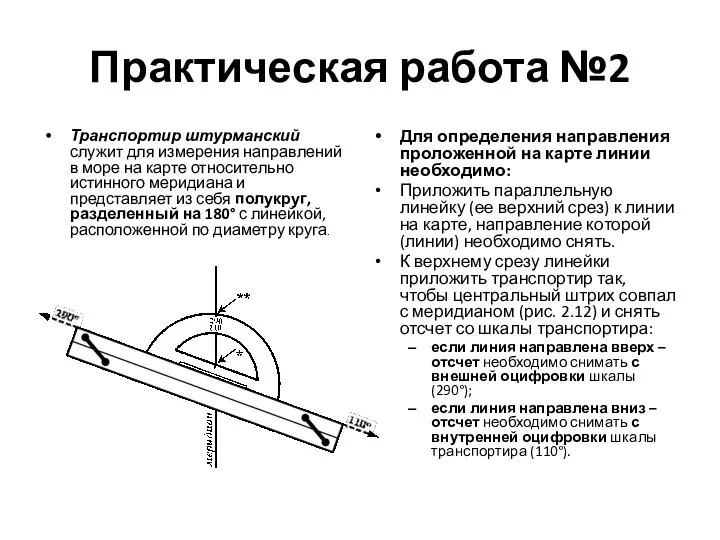
- 14. Практическая работа №2 Транспортир штурманский служит для измерения направлений в море на карте относительно истинного меридиана
- 15. Магнитное склонение. Девиация магнитного компаса Угол в плоскости истинного горизонта наблюдателя между северной частью истинного и
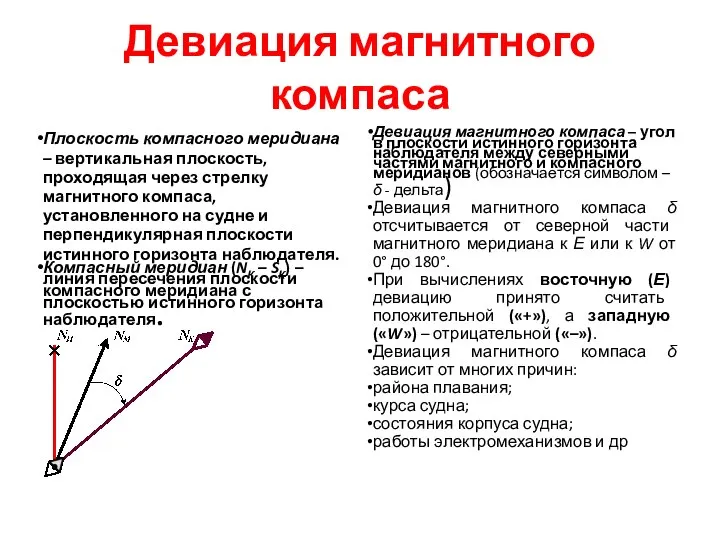
- 16. Девиация магнитного компаса Плоскость компасного меридиана – вертикальная плоскость, проходящая через стрелку магнитного компаса, установленного на
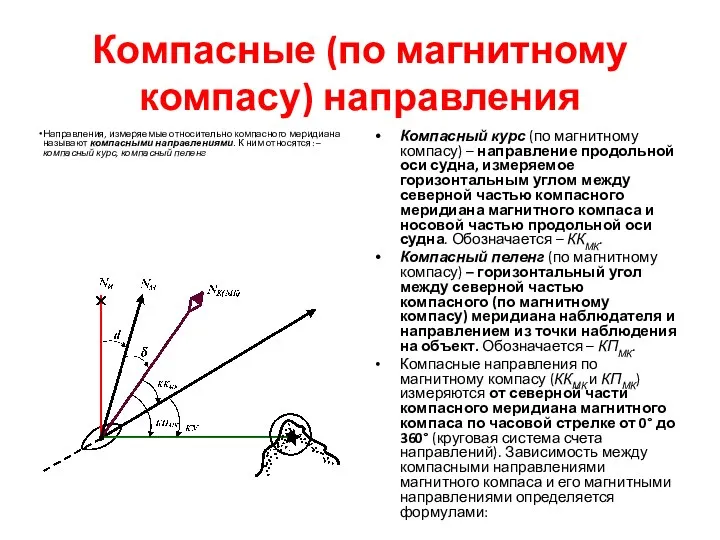
- 17. Компасные (по магнитному компасу) направления Направления, измеряемые относительно компасного меридиана называют компасными направлениями. К ним относятся:
- 18. Поправка магнитного компаса и ее определение Поправка магнитного компаса – это горизонтальный угол в плоскости истинного
- 19. Практическая работа №3 Задачи на приведение магнитного склонения (d) к году плавания и расчета поправки магнитного
- 20. Девиация магнитного компаса
- 21. Задачи на перевод и исправление румбов (определить значения: 1. из табл. 3.1; 2. ; 3. ИК
- 23. Скачать презентацию

Основные точки, линии и плоскости на поверхности Земли
Земная ось – воображаемая
Основные точки, линии и плоскости на поверхности Земли
Земная ось – воображаемая

Основные точки, линии и плоскости на поверхности Земли
Плоскости параллелей – плоскости,
Основные точки, линии и плоскости на поверхности Земли
Плоскости параллелей – плоскости,

Географические координаты. Разности широт и долгот
Географическая широта – угол при центре
Географические координаты. Разности широт и долгот
Географическая широта – угол при центре
Географическая долгота
Географическая долгота – двугранный угол между плоскостью Гринвичского (начального)
Географическая долгота
Географическая долгота – двугранный угол между плоскостью Гринвичского (начального)

Разность широт
Изменение широты (ϕ), при переходе судна из одного пункта в
Разность широт
Изменение широты (ϕ), при переходе судна из одного пункта в

Разность долгот
Разностью долгот называется изменение долготы (λ) при переходе судна из
Разность долгот
Разностью долгот называется изменение долготы (λ) при переходе судна из
Практическая работа №1
Разность широт
Пример 1: ϕ1′ = 75°00,0′S, ϕ2′ =
Практическая работа №1
Разность широт
Пример 1: ϕ1′ = 75°00,0′S, ϕ2′ =
Основные линии и плоскости наблюдателя
Через место наблюдателя (т. А) и центр
Основные линии и плоскости наблюдателя
Через место наблюдателя (т. А) и центр

Системы счета направлений
Круговая система счета направлений
Наблюдатель (т. А) – в центре.
Тогда
Системы счета направлений
Круговая система счета направлений
Наблюдатель (т. А) – в центре.
Тогда

Системы счета направлений
Четвертая система счета направлений
т.1 10°NE; 10°SE;
т.3 30°SW; 70°NW.
Румбовая система счета направлений
Всего
Системы счета направлений
Четвертая система счета направлений
т.1 10°NE; 10°SE;
т.3 30°SW; 70°NW.
Румбовая система счета направлений
Всего

Истинные направления и их соотношения
Истинный курс судна есть направление продольной оси
Истинные направления и их соотношения
Истинный курс судна есть направление продольной оси
Истинные направления и их соотношения
Курсовым углом называется горизонтальный угол в плоскости
Истинные направления и их соотношения
Курсовым углом называется горизонтальный угол в плоскости
Практическая работа №2
Транспортир штурманский служит для измерения направлений в море на
Практическая работа №2
Транспортир штурманский служит для измерения направлений в море на

Магнитное склонение. Девиация магнитного компаса
Угол в плоскости истинного горизонта наблюдателя между
Магнитное склонение. Девиация магнитного компаса
Угол в плоскости истинного горизонта наблюдателя между
Девиация магнитного компаса
Плоскость компасного меридиана – вертикальная плоскость, проходящая через
Девиация магнитного компаса
Плоскость компасного меридиана – вертикальная плоскость, проходящая через
Компасные (по магнитному компасу) направления
Направления, измеряемые относительно компасного меридиана называют компасными
Компасные (по магнитному компасу) направления
Направления, измеряемые относительно компасного меридиана называют компасными

Поправка магнитного компаса и ее определение
Поправка магнитного компаса – это горизонтальный
Поправка магнитного компаса и ее определение
Поправка магнитного компаса – это горизонтальный

Практическая работа №3
Задачи на приведение магнитного склонения (d) к году плавания
Практическая работа №3
Задачи на приведение магнитного склонения (d) к году плавания

Девиация магнитного компаса
Девиация магнитного компаса

Задачи на перевод и исправление румбов
(определить значения: 1. из табл. 3.1;
Задачи на перевод и исправление румбов (определить значения: 1. из табл. 3.1;
 ВУЛКАНЫ: строение, виды, поражающие факторы и действия при извержении вулканов
ВУЛКАНЫ: строение, виды, поражающие факторы и действия при извержении вулканов Оңтүстік Африка елдері
Оңтүстік Африка елдері Гуанчжоу (дәст.қыт. 廣州 , пиньинь: Guǎngzhōu, бұрын Кантон деп аталған)
Гуанчжоу (дәст.қыт. 廣州 , пиньинь: Guǎngzhōu, бұрын Кантон деп аталған) АФРИКА КЛИМАТИЧЕСКИЕ ПОЯСА
АФРИКА КЛИМАТИЧЕСКИЕ ПОЯСА Люксембург - презентация к уроку Географии
Люксембург - презентация к уроку Географии Проверочная работа Географические координаты
Проверочная работа Географические координаты Воронцовский дворец в Крыму. Иследовательско-творческий проект в ДОУ
Воронцовский дворец в Крыму. Иследовательско-творческий проект в ДОУ Природно-хозяйственные зоны России География. Россия. 8 класс УМК «Полярная звезда»
Природно-хозяйственные зоны России География. Россия. 8 класс УМК «Полярная звезда» Бразилия Синие небо
Бразилия Синие небо Toronto is the city of Сanada
Toronto is the city of Сanada l’Île-de-France
l’Île-de-France Художественное чтение на уроках географии как фактор формирования мировоззрения школьников Медведева Т.В., учитель географии
Художественное чтение на уроках географии как фактор формирования мировоззрения школьников Медведева Т.В., учитель географии  Времена года
Времена года Презентация на тему Природные зоны Евразии
Презентация на тему Природные зоны Евразии  Войди в природу другом! - презентация к уроку Географии
Войди в природу другом! - презентация к уроку Географии Презентация на тему Новая Зеландия
Презентация на тему Новая Зеландия  ПРЕЗЕНТАЦИЯ ПО ГЕОГРАФИИ НА ТЕМУ «Газовая промышленность как составная часть топливно-энергетическог
ПРЕЗЕНТАЦИЯ ПО ГЕОГРАФИИ НА ТЕМУ «Газовая промышленность как составная часть топливно-энергетическог Вода на Земле - презентация к уроку Географии
Вода на Земле - презентация к уроку Географии Прогноз параметров пожарной обстановки, количество очагов и площади ландшафтных пожаров в августе 2019 года в РФ
Прогноз параметров пожарной обстановки, количество очагов и площади ландшафтных пожаров в августе 2019 года в РФ Монголия - презентация к уроку Географии
Монголия - презентация к уроку Географии Почвы
Почвы Современная политическая карта мира
Современная политическая карта мира Зарубежная Азия
Зарубежная Азия Путешествие по Африке
Путешествие по Африке Россия
Россия Экология – это слово Для нас не ново. Мы часто это слышим, Часто читаем, изучаем. И по-своему это понимаем! «Экология в рисунках»
Экология – это слово Для нас не ново. Мы часто это слышим, Часто читаем, изучаем. И по-своему это понимаем! «Экология в рисунках»  Федеративная Республика Германия
Федеративная Республика Германия Северо-запад России
Северо-запад России