- Механизмы управления программами

Содержание
- 2. Структура раздела Процессы Понятие процесса Управление процессами Процессы и потоки Параллельные процессы Процессы в ОС UNIX
- 3. Процессы
- 4. Понятие процесса Процесс – некоторая деятельность, связанная с исполнением программы на процессоре. Процесс – система действий,
- 5. Виды процессов По принадлежности к центральному процессору Внутренние процессы – связаны с программами, исполняемыми на центральном
- 6. По динамическому признаку Последовательные процессы – процессы, которые не могут выполняться одновременно. Параллельные процессы – одновременно
- 7. Состояния процесса Порождение Готовность Активное Ожидание Окончание
- 8. Атрибуты процессов Идентификатор процесса Таблицы адресов выделенных процессу областей памяти Таблицы файлов Приоритет процесса Состояние процесса
- 9. Управление процессами Основные функции ОС Создание и удаление процессов Планирование и диспетчеризация Синхронизация процессов и обеспечение
- 10. Планирование Планирование – управление очередями с целью минимизации задержек и максимизации производительности системы Виды планирования Долгосрочное
- 11. Уровни планирования Создание Завершение Выполнение Готов Блокирован Блокирован приостановлен Готов приостановлен Краткосрочное планировани Краткосрочное планирование Среднесрочное
- 12. Дисциплины диспетчеризации Бесприоритетные Приоритетные Линейные Нелинейные В порядке очереди Случайный выбор Циклический алгоритм Многоприоритетный циклический С
- 13. В порядке очереди (FIFO) Процессор Очередь
- 14. Циклический алгоритм (Round robin) Очереди Процессор Обслуженные заявки Заявки, обслуживание которых не закончено Порядок просмотра очередей
- 15. Процессы и потоки Многопоточность - способность ОС поддерживать в рамках одного процесса выполнение нескольких потоков. Поток
- 16. Один поток Несколько потоков
- 17. Блок управления процессом Адресное пространство Поток 1 Поток 2 Процесс
- 18. Параллельные процессы Взаимодействующие процессы имеют информационные связи и используют общие ресурсы Критический ресурс не допускает одновременное
- 19. Конкурирующие процессы Процесс 1 Процесс 2 Критический ресурс Критическая секция Освобождение Освобождение Блокировка
- 20. Блокирующие переменные F==1 нет да F=0 F=1 Проверка занятости Занять ресурс Критическая секция Освободить ресурс F
- 21. Семафоры Дейкстры S – семафор P(S) – операция закрытия (проверки) V(S) – операция открытия (увеличения) P(S):
- 22. Взаимное исключение var S: semafore; begin S:=1; parbegin ПР1: begin P(S); {критическая секция} V(S); end ПР2:
- 23. Производитель - потребитель Писатели Читатели Читатели - писатели
- 24. var S_св, S_зап , S_иск; begin S_св:=1; S_зап:=0; S_иск:=1; parbegin ПРОИЗВОДИТЕЛЬ: while true do begin {подготовка
- 25. ПОТРЕБИТЕЛЬ: while true do begin P(S_зап); P(S_иск); {прием сообщения} V(S_св); V(S_иск); {обработка сообщения} end parend end
- 26. "Читатели – писатели" с приоритетом читателей var R,W: semaphore; NR: integer; procedure ЧИТАТЕЛЬ; begin P(R); NR:=NR+1;
- 27. procedure ПИСАТЕЛЬ; begin P(W); Write_Data; V(W); end begin NR:=0; InitSem(R,1); InitSem(W,1); parbegin while true do ЧИТАТЕЛЬ
- 28. while true do ЧИТАТЕЛЬ and while true do ПИСАТЕЛЬ and while true do ПИСАТЕЛЬ and ………………….
- 29. Счетные семафоры (Читатели-писатели) var S: sevmafore; Q,R: integer; begin R:=1; Q:=n; {Инициализация} parbegin ЧИТАТЕЛЬ: do {……….}
- 30. ПИСАТЕЛЬ: do {…………..} P(S,Q); {запись} V(S,Q); end; parend end
- 31. Обедающие философы
- 32. Множественные семафоры var S: array 1..5 of semaphore; i: integer; begin i:=5; repeat S[i]:=1; i:=i-1; until
- 33. i: begin var left, right: 1..5; begin left:=(i-1) mod 5; right:= (i+1) mod 5; repeat {размышления}
- 34. Тупики Взаимные блокировки (deadlock) П1 П2
- 35. Условия возникновения Взаимные исключения. Одновременно использовать ресурсы может только один процесс. Удержание и ожидание. Процесс может
- 36. Предотвращение тупиков Условие взаимного исключения можно подавить путем неограниченного разделения ресурсов. Условие ожидания предотвращается, если выделять
- 37. Процессы в ОС UNIX
- 38. Виды процессов Системные процессы. Системные процессы – часть ядра. Запускаются при инициализации системы. - управление свопингом.
- 39. Атрибуты процесса Идентификатор процесса (PID) Идентификатор родительского процесса (PPID) Реальный идентификатор пользователя (RID) Эффективный идентификатор пользователя
- 40. Дескриптор процесса Таблица процессов Блок управления процессом (PCB)
- 41. Состояния процесса
- 42. Создание и уничтожение процессов #include #include pid_t fork(void);
- 43. #include #include #include main() { int pid; pid = fork(); if (pid == -1){ perror("fork"); exit
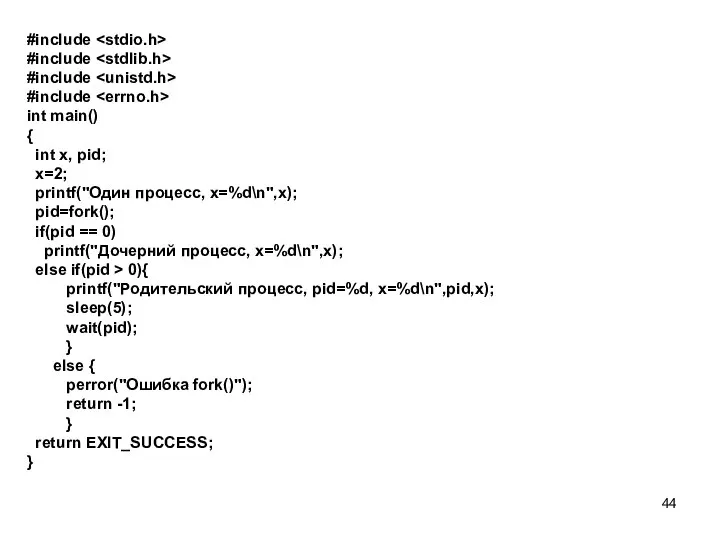
- 44. #include #include #include #include int main() { int x, pid; x=2; printf("Один процесс, x=%d\n",x); pid=fork(); if(pid
- 45. Результат выполнения fork() Отводится место в таблице процессов под новый процесс Порожденному процессу присваивается идентификатор Создается
- 46. Порожденный процесс наследует Идентификаторы пользователя и группы Переменные окружения Сигналы и их обработчики Ограничения, накладываемые на
- 47. Различия между процессами Порожденный процесс имеет свой идентификатор PID Идентификаторы родительского процесса PPID различны Порожденный процесс
- 48. Завершение процесса Процесс завершается по функции exit. Код нормального завершения 0. Действия: Отключаются сигналы. Сохраняется код
- 49. Синхронизация процессов #include pid_t wait(int* status_p); pid_t waitpid(pid_t child_pid, int* status, int option); WNOHANG – неблокирующий
- 50. Запуск новой программы Дерево семейства вызовов exec execl execle execlp execv execve execvp
- 51. Аргументы передаются списком execl(const char* path, const char *arg0,…,const char *argn, NULL); передается полный путь к
- 52. #include #include #include #include #include int main() { pid_t pid; int status; if ((pid=fork())==-1) { perror("Error
- 53. if (pid == 0) { printf("Child\n"); execl("/home/sbd/child",NULL); perror("execl"); exit(errno); } else { printf("Parent\n"); wait(&status); exit (0);
- 54. Вызываемая программа #include #include #include int main() { sleep(4); printf("Execut child\n"); exit (0); }
- 55. Планирование процессов Таймер Фиксированный тик – интервал между соседними прерываниями. Функции обработчика прерываний от таймера: Обновление
- 56. Функции работы со временем time.h – ANSI C time_t time(time_t *tmv); возвращает количество секунд, прошедшее с
- 57. struct tm { int tm_sec; //секунды int tm_min; //минуты int tm_hour; //часы (от 0 до 24)
- 58. struct tm* localtime(const time_t *tmv); struct tm* gmtime(const time_t *tmv); time_t mktime(struct tm* tm_ptr); #include
- 59. #include #include #include #include #include int main() { time_t tick= CLOCKS_PER_SEC; time_t tmv; struct tm *tp;
- 60. Алармы Таймер реального времени (SIGALARM) - используется для подсчета реального времени Таймер профилирования (SIGPROF) – изменяется
- 61. Операции над процессами Создание процесса Уничтожение процесса Приостановка процесса Возобновление процесса Изменение приоритета процесса Блокирование процесса
- 62. Взаимодействие процессов (IPC) Сигналы Каналы (pipe) Именованные каналы (FIFO) Сообщения (messages) Семафоры Разделяемая память Сокеты (socket)
- 63. Сигналы Генерация сигнала Особые ситуации Терминальные прерывания (Del, Ctrl+C…) Другие процессы (вызов kill) Управление заданиями Квоты
- 64. Доставка и обработка сигнала Ядро от имени процесса проверяет наличие сигнала Если сигнал есть, ядро обрабатывает
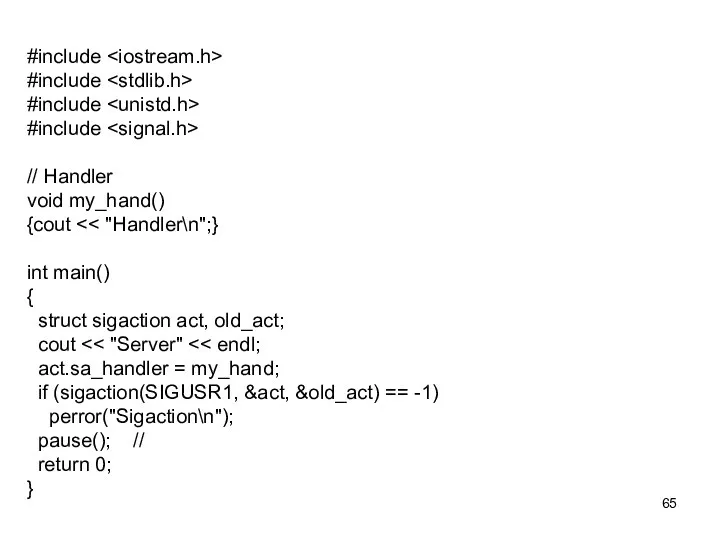
- 65. #include #include #include #include // Handler void my_hand() {cout int main() { struct sigaction act, old_act;
- 66. // Формирование сигнала #include #include #include int main() { int pid; cout cin >> pid; cout
- 67. Неименованные каналы (pipe) #include Int pipe(int fd[2]); процесс fd[1] fd[0] канал процесс ядро
- 68. Канал после вызова fork()
- 69. Родительский процесс Дочерний процесс fork Канал Односторонний канал
- 70. #include #include #include #include #include int main() { pid_t childPid; int flds[2], status; char buf[]="Message"; if
- 71. who | sort | lp who sort lp Канал 1 Канал 2 stdout stdout stdin stdin
- 72. родительский процесс дочерний процесс Канал 1 Канал 2 fd2[0] fd1[1] fd1[0] fd2[1] Двусторонняя передача по двум
- 73. Именованные каналы #include #include int mkfifo(const char *pathname, mode_t mode); При успешном звершении возвращается 0, в
- 74. Логика открытия объекта IPC
- 75. #include #include #include #include #include #include #define NAME " fifo_s.cc" int main() { int fd; char
- 76. #include #include #include #include #include #include #include #include #define NAME " fifo_s.cc" int main() { char
- 77. Создание ключей #include #include key_t ftok(const char *pathname, int id); Возвращает ключ, в случае ошибки возвращает
- 78. #include #include #include #include int main() { key_t key; if((key = ftok("main.c",0))==-1) printf("Error 1\n"); printf("key1->%x\n",key); if((key
- 79. Управляющая структура IPC struct ipc_perm { uid_t uid; //идентификатор пользователя владельца gid_t gid; //идентификатор группы владельца
- 80. Сообщения (messages) Ядро Процесс А Процесс Г Процесс Б Процесс В А-В А-В А-Г А-Г В-Б
- 81. Очереди сообщений Таблица сообщений Заголовок очереди msgid_ds Область памяти ядра msg_perm msg_first msg_last ipc_perm struct msg
- 82. Структуры данных struct msgid_ds
- 83. struct msg
- 84. Функции #include #include #include #include int msgget(key_t key, int flag); int msgsnd(int msgfd, const void* msgPtr,
- 85. /* mes.h */ #define PERM 0666 typedef struct msgbuf { long mtype; char buff[80]; } Message;
- 86. #include #include #include #include #include "mes.h" int main() { Message message; key_t key; int msgid, length,
- 87. #include #include #include #include #include "mes.h" int main() { Message message; key_t key; int msgid, length;
- 88. Семафоры Таблица семафоров struct sem struct sem sem_base struct semid_ds
- 89. struct semid_ds { struct ipc_perm sem_perm; //права доступа struct sem *sem_base; //указатель на массив семафоров ushort
- 90. #include #include #include int semget(key_t key, int num_sem, int flag); flag – SEM_R или SEM_A (R
- 91. int semctl(int semfd; int num, int cmd, union semun arg); union semun { int val; //значение
- 92. sem_op > 0 => v(s) semval = semval + sem_op Если есть процессы, ожидающие изменения этого
- 93. sem_op p(s) if (semval >= abs(sem_op)) semval = semval – abs(sem_op) else if (sem_flg & IPC_NOWAIT)
- 94. Разделяемая память Пространство пользователя Пространство ядра общая память
- 95. Процесс 1 Процесс 2 Память shmget() shmat() shmat()
- 96. struct shmid_ds { struct ipc_perm shm_perm; // режим и права доступа size_t shm_size; //размер сегмента pid_t
- 97. Функции #include int shmget(key_t key, size_t size, int shmflag); void *shmat(int shmid, const void *shmaddr, int
- 98. /* share.h */ #include #include #include #include #include #include #define SHMKEY1 (key_t)010 #define SHMKEY2 (key_t)015 #define
- 99. #include "share.h" #define IFLAGS (IPC_CREAT | IPC_EXCL) #define ERR ((struct databuf *) -1) static int shmid1,
- 100. int getsem(void) { union semun x; x.val = 0; if((semid = semget(SEMKEY, 2, 0600|IFLAGS))==-1) {perror("semget"); exit(1);}
- 101. void reader(int semid, struct databuf *buf1, struct databuf *buf2) { for(;;) { buf1->d_nread=read(0,buf1->d_buf, SIZ); semop(semid, &v1,
- 102. void writer(int semid, struct databuf *buf1, struct databuf *buf2) { for(;;) { semop(semid, &p1, 1); semop(semid,
- 103. main() { int semid; pid_t pid; struct databuf *buf1, *buf2; semid = getsem(); getseg(&buf1, &buf2); switch(pid
- 104. Процессы в ОС Windows
- 105. Особенности процессов Процесс виртуальное адресное пространство; управляющая информация, необходимая для выполнения набора потоков (указатель на карту
- 106. Потоки Каждый процесс начинается с одного потока, но новые потоки могут создаваться динамически Потоки имеют состояния
- 107. Волокна Переключение потоков в операционной системе Windows занимает довольно много времени, так как для этого необходимо
- 108. Создание процесса Открывается файл образа (exe – файл) Создается объект «процесс» Создается первичный поток (стек, контекст
- 109. Новый процесс создается при помощи функции CreateProcess Функция имеет 10 параметров: 1. Указатель на имя исполняемого
- 110. В операционной системе Windows не поддерживается какой-либо иерархии процессов, например «родительский - дочерний». Все созданные процессы
- 111. Создание потока Каждый процесс в Windows создается с одним потоком Процесс может позднее создать дополнительные потоки
- 112. Планирование процессов В операционной системе Windows нет центрального потока планирования. Когда какой-либо поток не может более
- 113. Приоритеты процессов Классы приоритетов реального времени высокий выше нормы нормальный ниже нормы неработающий Приоритеты потоков критичный
- 114. Взаимодействие процессов каналы байтовый режим режим сообщений именованные каналы почтовые ящики сокеты вызов удаленной процедуры совместно
- 115. Механизмы синхронизации семафоры мьютексы критические секции события
- 117. Скачать презентацию
Структура раздела
Процессы
Понятие процесса
Управление процессами
Процессы и потоки
Параллельные процессы
Процессы в ОС UNIX
Атрибуты
Структура раздела
Процессы
Понятие процесса
Управление процессами
Процессы и потоки
Параллельные процессы
Процессы в ОС UNIX
Атрибуты
Процессы
Процессы
Понятие процесса
Процесс – некоторая деятельность, связанная с исполнением программы на процессоре.
Процесс
Понятие процесса
Процесс – некоторая деятельность, связанная с исполнением программы на процессоре.
Процесс
Виды процессов
По принадлежности к центральному процессору
Внутренние процессы – связаны с программами,
Виды процессов
По принадлежности к центральному процессору
Внутренние процессы – связаны с программами,
По динамическому признаку
Последовательные процессы – процессы, которые не могут выполняться одновременно.
Параллельные
По динамическому признаку
Последовательные процессы – процессы, которые не могут выполняться одновременно.
Параллельные

Состояния процесса
Порождение
Готовность
Активное
Ожидание
Окончание
Состояния процесса
Порождение
Готовность
Активное
Ожидание
Окончание
Атрибуты процессов
Идентификатор процесса
Таблицы адресов выделенных процессу областей памяти
Таблицы файлов
Приоритет процесса
Состояние процесса
Информация
Атрибуты процессов
Идентификатор процесса
Таблицы адресов выделенных процессу областей памяти
Таблицы файлов
Приоритет процесса
Состояние процесса
Информация

Управление процессами
Основные функции ОС
Создание и удаление процессов
Планирование и диспетчеризация
Синхронизация процессов и
Управление процессами
Основные функции ОС
Создание и удаление процессов
Планирование и диспетчеризация
Синхронизация процессов и
Планирование
Планирование – управление очередями с целью минимизации задержек и максимизации производительности
Планирование
Планирование – управление очередями с целью минимизации задержек и максимизации производительности
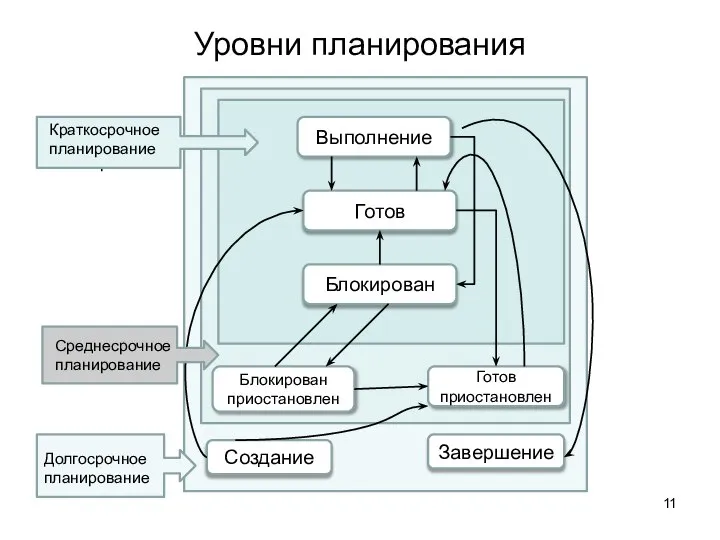
Уровни планирования
Создание
Завершение
Выполнение
Готов
Блокирован
Блокирован приостановлен
Готов приостановлен
Краткосрочное планировани
Краткосрочное планирование
Среднесрочное планирование
Долгосрочное планирование
Уровни планирования
Создание
Завершение
Выполнение
Готов
Блокирован
Блокирован приостановлен
Готов приостановлен
Краткосрочное планировани
Краткосрочное планирование
Среднесрочное планирование
Долгосрочное планирование
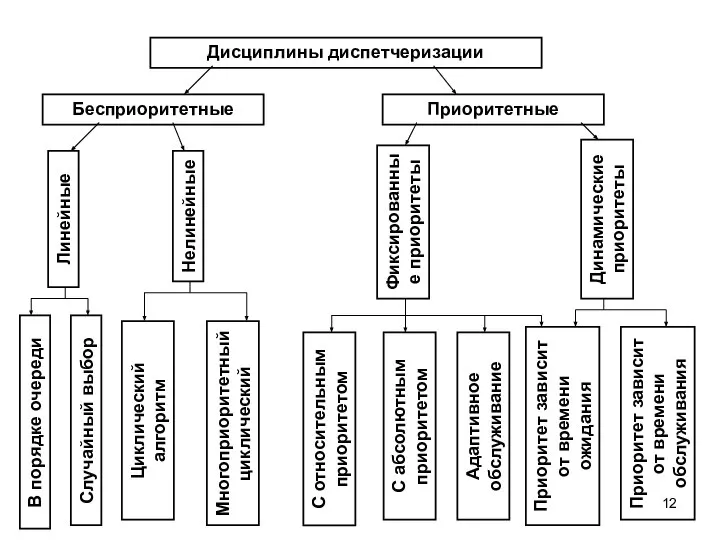
Дисциплины диспетчеризации
Бесприоритетные
Приоритетные
Линейные
Нелинейные
В порядке очереди
Случайный выбор
Циклический алгоритм
Многоприоритетный циклический
С относительным приоритетом
С абсолютным приоритетом
Адаптивное
Дисциплины диспетчеризации
Бесприоритетные
Приоритетные
Линейные
Нелинейные
В порядке очереди
Случайный выбор
Циклический алгоритм
Многоприоритетный циклический
С относительным приоритетом
С абсолютным приоритетом
Адаптивное
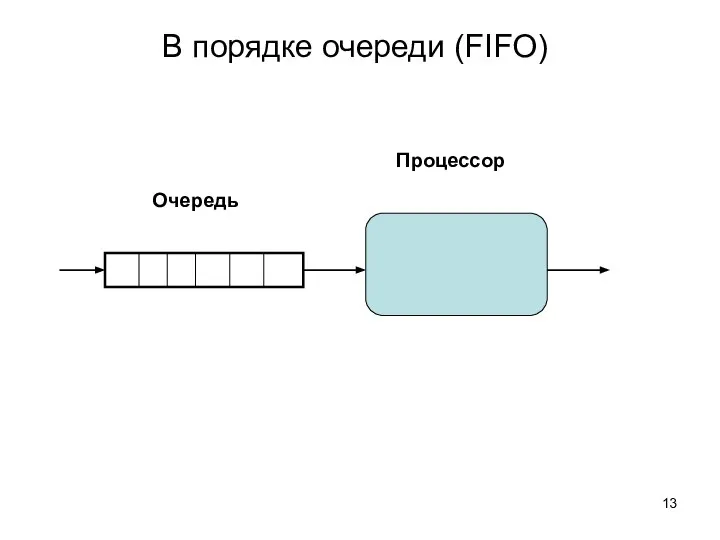
В порядке очереди (FIFO)
Процессор
Очередь
В порядке очереди (FIFO)
Процессор
Очередь

Циклический алгоритм (Round robin)
Очереди
Процессор
Обслуженные заявки
Заявки, обслуживание которых не закончено
Порядок просмотра очередей
Циклический алгоритм (Round robin)
Очереди
Процессор
Обслуженные заявки
Заявки, обслуживание которых не закончено
Порядок просмотра очередей
Процессы и потоки
Многопоточность - способность ОС поддерживать в рамках одного процесса
Процессы и потоки
Многопоточность - способность ОС поддерживать в рамках одного процесса
Один поток
Несколько потоков
Один поток
Несколько потоков

Блок управления процессом
Адресное пространство
Поток 1
Поток 2
Процесс
Блок управления процессом
Адресное пространство
Поток 1
Поток 2
Процесс

Параллельные процессы
Взаимодействующие процессы имеют информационные связи и используют общие ресурсы
Критический ресурс
Параллельные процессы
Взаимодействующие процессы имеют информационные связи и используют общие ресурсы
Критический ресурс
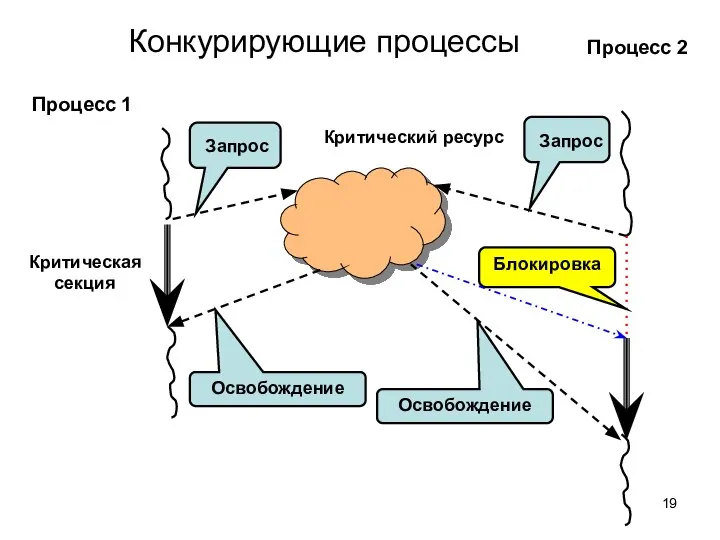
Конкурирующие процессы
Процесс 1
Процесс 2
Критический ресурс
Критическая секция
Освобождение
Освобождение
Блокировка
Конкурирующие процессы
Процесс 1
Процесс 2
Критический ресурс
Критическая секция
Освобождение
Освобождение
Блокировка
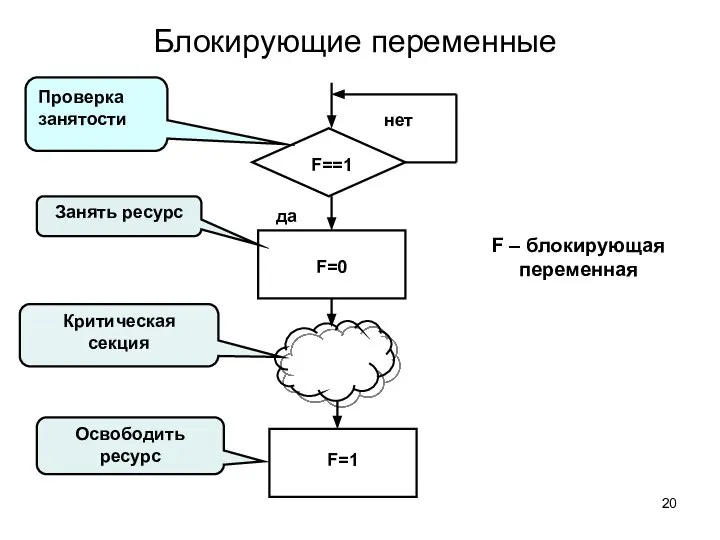
Блокирующие переменные
F==1
нет
да
F=0
F=1
Проверка занятости
Занять ресурс
Критическая секция
Освободить ресурс
F – блокирующая переменная
Блокирующие переменные
F==1
нет
да
F=0
F=1
Проверка занятости
Занять ресурс
Критическая секция
Освободить ресурс
F – блокирующая переменная
Семафоры Дейкстры
S – семафор
P(S) – операция закрытия (проверки)
V(S) – операция открытия
Семафоры Дейкстры
S – семафор
P(S) – операция закрытия (проверки)
V(S) – операция открытия
Взаимное исключение
var S: semafore;
begin
S:=1;
parbegin
ПР1:
begin
P(S);
{критическая секция}
V(S);
end
ПР2:
begin
P(S);
{критическая секция}
V(S);
end
parend
end
Взаимное исключение
var S: semafore;
begin
S:=1;
parbegin
ПР1:
begin
P(S);
{критическая секция}
V(S);
end
ПР2:
begin
P(S);
{критическая секция}
V(S);
end
parend
end
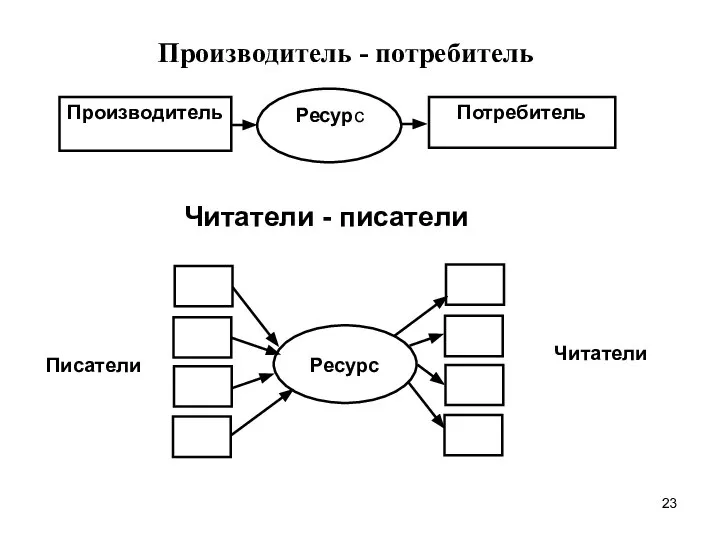
Производитель - потребитель
Писатели
Читатели
Читатели - писатели
Производитель - потребитель
Писатели
Читатели
Читатели - писатели

var S_св, S_зап , S_иск;
begin
S_св:=1;
S_зап:=0;
S_иск:=1;
parbegin
ПРОИЗВОДИТЕЛЬ:
while true do
begin
{подготовка сообщения}
P(S_св);
P(S_иск);
{запись сообщения}
V(S_зап);
V(S_иск);
end
and
var S_св, S_зап , S_иск;
begin
S_св:=1;
S_зап:=0;
S_иск:=1;
parbegin
ПРОИЗВОДИТЕЛЬ:
while true do
begin
{подготовка сообщения}
P(S_св);
P(S_иск);
{запись сообщения}
V(S_зап);
V(S_иск);
end
and
ПОТРЕБИТЕЛЬ:
while true do
begin
P(S_зап);
P(S_иск);
{прием сообщения}
V(S_св);
V(S_иск);
{обработка сообщения}
end
parend
end
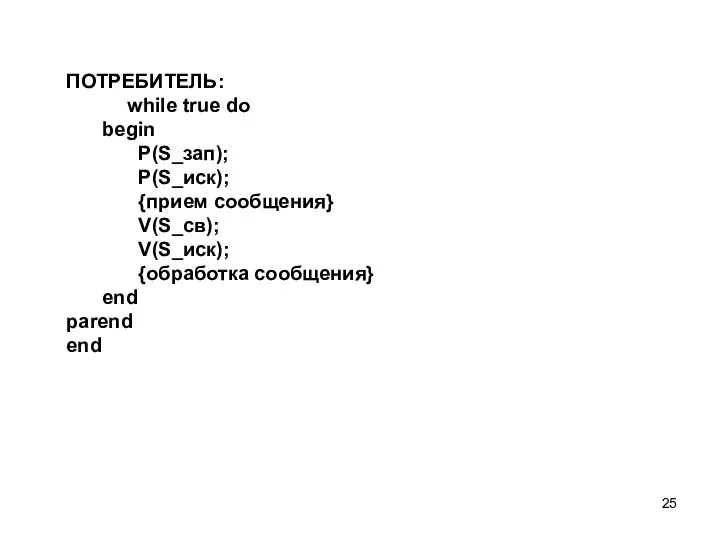
ПОТРЕБИТЕЛЬ:
while true do
begin
P(S_зап);
P(S_иск);
{прием сообщения}
V(S_св);
V(S_иск);
{обработка сообщения}
end
parend
end
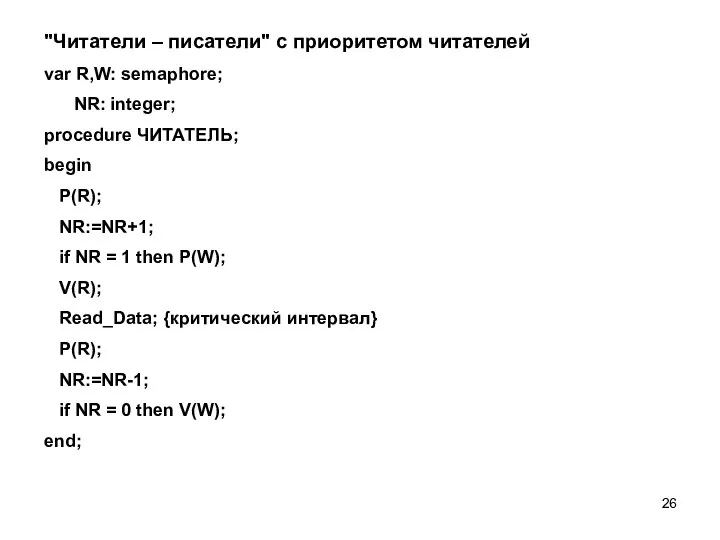
"Читатели – писатели" с приоритетом читателей
var R,W: semaphore;
NR: integer;
procedure ЧИТАТЕЛЬ;
begin
"Читатели – писатели" с приоритетом читателей
var R,W: semaphore;
NR: integer;
procedure ЧИТАТЕЛЬ;
begin

procedure ПИСАТЕЛЬ;
begin
P(W);
Write_Data;
V(W);
end
begin
NR:=0;
InitSem(R,1); InitSem(W,1);
parbegin
procedure ПИСАТЕЛЬ;
begin
P(W);
Write_Data;
V(W);
end
begin
NR:=0;
InitSem(R,1); InitSem(W,1);
parbegin
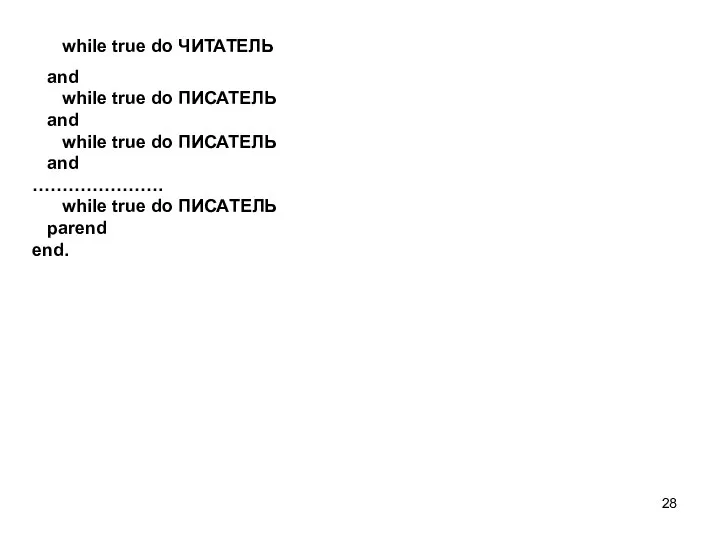
while true do ЧИТАТЕЛЬ
and
while true do ПИСАТЕЛЬ
while true do ЧИТАТЕЛЬ
and
while true do ПИСАТЕЛЬ

Счетные семафоры (Читатели-писатели)
var S: sevmafore;
Q,R: integer;
begin R:=1; Q:=n; {Инициализация}
parbegin
Счетные семафоры (Читатели-писатели)
var S: sevmafore;
Q,R: integer;
begin R:=1; Q:=n; {Инициализация}
parbegin
ПИСАТЕЛЬ: do
{…………..}
P(S,Q);
{запись}
V(S,Q);
end;
parend
end
ПИСАТЕЛЬ: do
{…………..}
P(S,Q);
{запись}
V(S,Q);
end;
parend
end

Обедающие философы
Обедающие философы
Множественные семафоры
var S: array 1..5 of semaphore;
i: integer;
begin
i:=5;
repeat
Множественные семафоры
var S: array 1..5 of semaphore;
i: integer;
begin
i:=5;
repeat
i: begin
var left, right: 1..5;
begin
left:=(i-1) mod 5;
i: begin
var left, right: 1..5;
begin
left:=(i-1) mod 5;

Тупики
Взаимные блокировки (deadlock)
П1
П2
Тупики
Взаимные блокировки (deadlock)
П1
П2

Условия возникновения
Взаимные исключения. Одновременно использовать ресурсы может только один процесс.
Удержание и
Условия возникновения
Взаимные исключения. Одновременно использовать ресурсы может только один процесс.
Удержание и

Предотвращение тупиков
Условие взаимного исключения можно подавить путем неограниченного разделения ресурсов.
Условие ожидания
Предотвращение тупиков
Условие взаимного исключения можно подавить путем неограниченного разделения ресурсов.
Условие ожидания

Процессы в ОС UNIX
Процессы в ОС UNIX
Виды процессов
Системные процессы.
Системные процессы – часть ядра. Запускаются при инициализации системы.
Виды процессов
Системные процессы.
Системные процессы – часть ядра. Запускаются при инициализации системы.
Атрибуты процесса
Идентификатор процесса (PID)
Идентификатор родительского процесса (PPID)
Реальный идентификатор пользователя (RID)
Атрибуты процесса
Идентификатор процесса (PID)
Идентификатор родительского процесса (PPID)
Реальный идентификатор пользователя (RID)
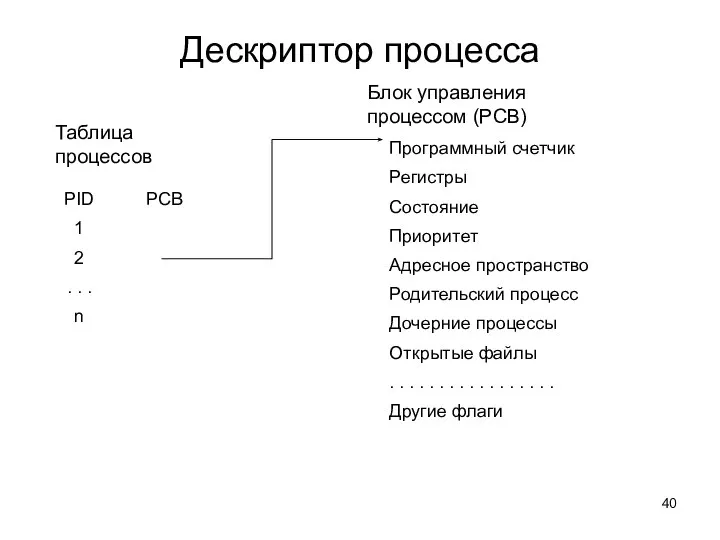
Дескриптор процесса
Таблица процессов
Блок управления процессом (PCB)
Дескриптор процесса
Таблица процессов
Блок управления процессом (PCB)

Состояния процесса
Состояния процесса
Создание и уничтожение процессов
#include
#include
pid_t fork(void);
Создание и уничтожение процессов
#include
#include
pid_t fork(void);
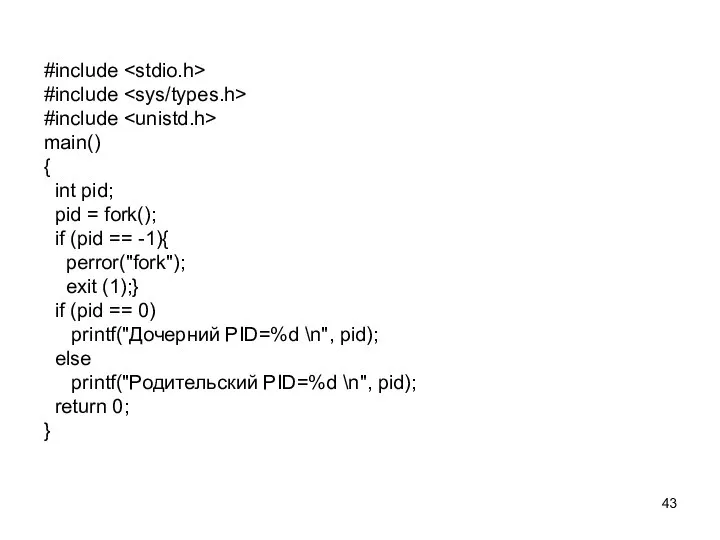
#include
#include
#include
main()
{
int pid;
pid = fork();
if (pid
#include
#include
#include
main()
{
int pid;
pid = fork();
if (pid
#include
#include
#include
#include
int main()
{
int x, pid;
x=2;
printf("Один
#include
#include
#include
#include
int main()
{
int x, pid;
x=2;
printf("Один
Результат выполнения fork()
Отводится место в таблице процессов под новый процесс
Порожденному процессу
Результат выполнения fork()
Отводится место в таблице процессов под новый процесс
Порожденному процессу
Порожденный процесс наследует
Идентификаторы пользователя и группы
Переменные окружения
Сигналы и их обработчики
Ограничения, накладываемые
Порожденный процесс наследует
Идентификаторы пользователя и группы
Переменные окружения
Сигналы и их обработчики
Ограничения, накладываемые
Различия между процессами
Порожденный процесс имеет свой идентификатор PID
Идентификаторы родительского процесса PPID
Различия между процессами
Порожденный процесс имеет свой идентификатор PID
Идентификаторы родительского процесса PPID
Завершение процесса
Процесс завершается по функции exit. Код нормального завершения 0.
Действия:
Отключаются сигналы.
Сохраняется
Завершение процесса
Процесс завершается по функции exit. Код нормального завершения 0.
Действия:
Отключаются сигналы.
Сохраняется
Синхронизация процессов
#include
pid_t wait(int* status_p);
pid_t waitpid(pid_t child_pid, int* status, int option);
Синхронизация процессов
#include
pid_t wait(int* status_p);
pid_t waitpid(pid_t child_pid, int* status, int option);
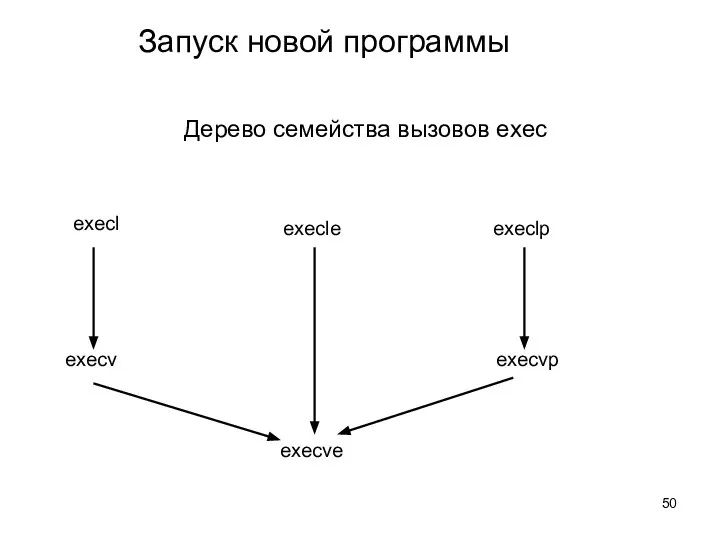
Запуск новой программы
Дерево семейства вызовов exec
execl
execle
execlp
execv
execve
execvp
Запуск новой программы
Дерево семейства вызовов exec
execl
execle
execlp
execv
execve
execvp
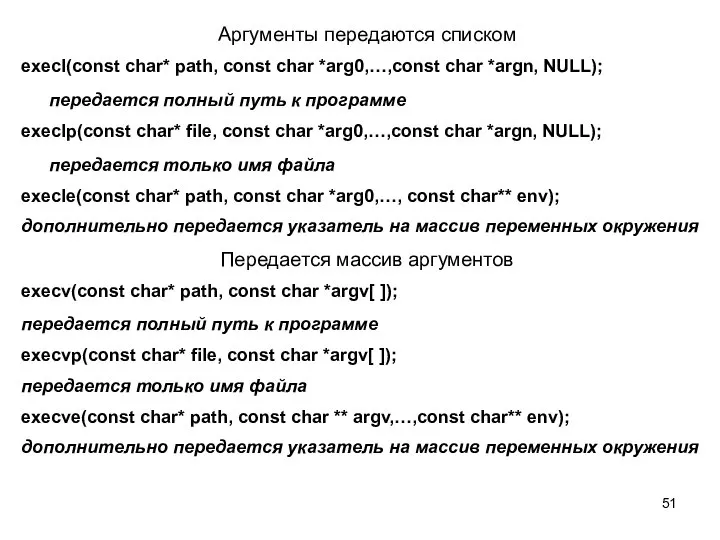
Аргументы передаются списком
execl(const char* path, const char *arg0,…,const char *argn, NULL);
Аргументы передаются списком
execl(const char* path, const char *arg0,…,const char *argn, NULL);

#include
#include
#include
#include
#include
int main()
{ pid_t pid;
int
#include
#include
#include
#include
#include
int main()
{ pid_t pid;
int
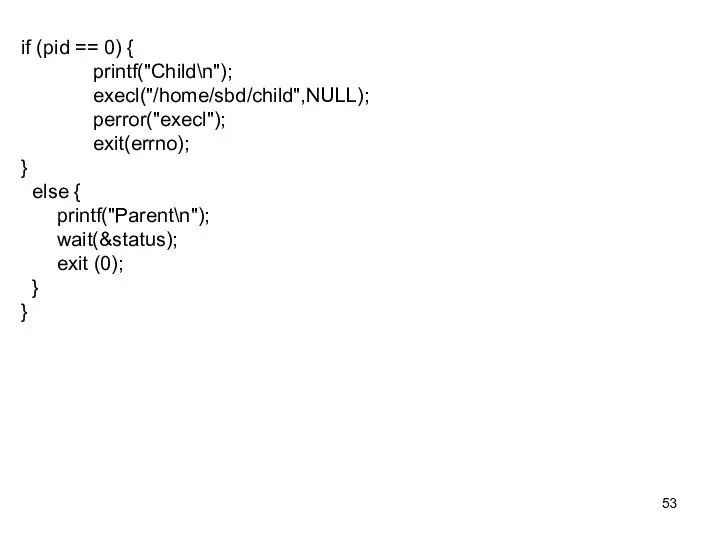
if (pid == 0) {
printf("Child\n");
execl("/home/sbd/child",NULL);
perror("execl");
exit(errno);
}
else {
printf("Parent\n");
wait(&status);
exit (0);
if (pid == 0) {
printf("Child\n");
execl("/home/sbd/child",NULL);
perror("execl");
exit(errno);
}
else {
printf("Parent\n");
wait(&status);
exit (0);

Вызываемая программа
#include
#include
#include
int main()
{
sleep(4);
printf("Execut child\n");
exit (0);
}
Вызываемая программа
#include
#include
#include
int main()
{
sleep(4);
printf("Execut child\n");
exit (0);
}
Планирование процессов
Таймер
Фиксированный тик – интервал между соседними прерываниями.
Функции обработчика прерываний
Планирование процессов
Таймер
Фиксированный тик – интервал между соседними прерываниями.
Функции обработчика прерываний
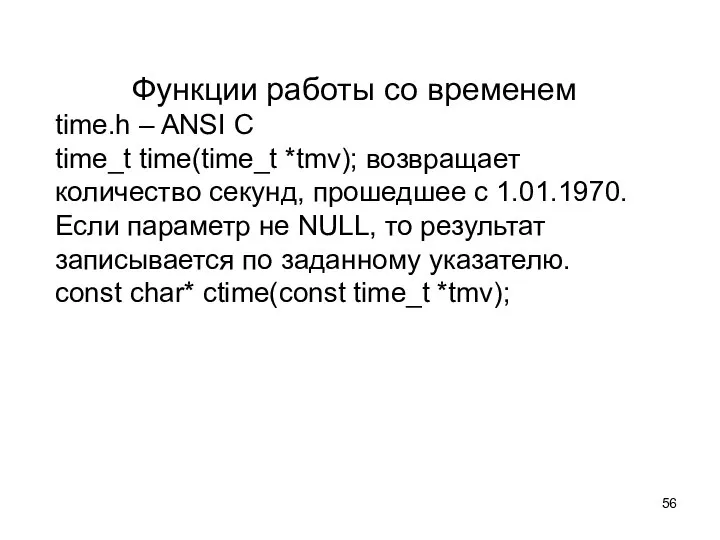
Функции работы со временем
time.h – ANSI C
time_t time(time_t *tmv); возвращает количество
Функции работы со временем
time.h – ANSI C
time_t time(time_t *tmv); возвращает количество

struct tm {
int tm_sec; //секунды
int tm_min; //минуты
int tm_hour; //часы (от 0 до 24)
int tm_mday; //дни
struct tm {
int tm_sec; //секунды
int tm_min; //минуты
int tm_hour; //часы (от 0 до 24)
int tm_mday; //дни

struct tm* localtime(const time_t *tmv);
struct tm* gmtime(const time_t *tmv);
time_t mktime(struct tm*
struct tm* localtime(const time_t *tmv);
struct tm* gmtime(const time_t *tmv);
time_t mktime(struct tm*
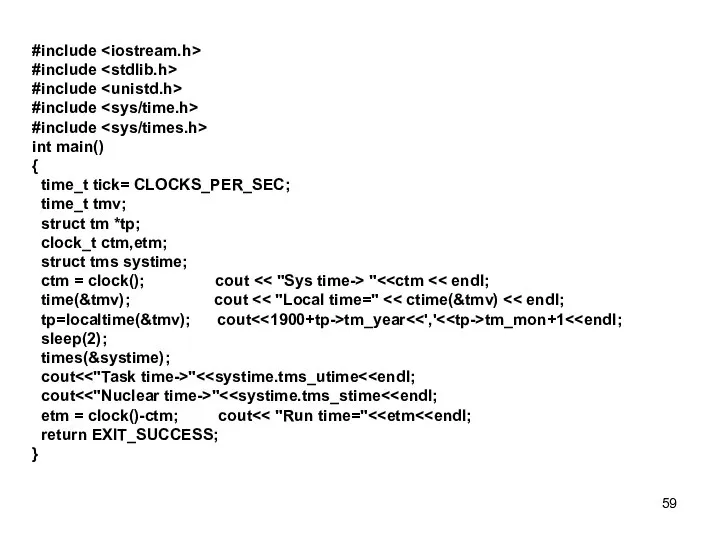
#include
#include
#include
#include
#include
int main()
{
time_t tick= CLOCKS_PER_SEC;
time_t
#include
#include
#include
#include
#include
int main()
{
time_t tick= CLOCKS_PER_SEC;
time_t
Алармы
Таймер реального времени (SIGALARM) - используется для подсчета реального времени
Таймер
Алармы
Таймер реального времени (SIGALARM) - используется для подсчета реального времени
Таймер
Операции над процессами
Создание процесса
Уничтожение процесса
Приостановка процесса
Возобновление процесса
Изменение приоритета процесса
Блокирование процесса
Пробуждение процесса
Запуск
Операции над процессами
Создание процесса
Уничтожение процесса
Приостановка процесса
Возобновление процесса
Изменение приоритета процесса
Блокирование процесса
Пробуждение процесса
Запуск
Взаимодействие процессов (IPC)
Сигналы
Каналы (pipe)
Именованные каналы (FIFO)
Сообщения (messages)
Семафоры
Разделяемая память
Сокеты (socket)
Взаимодействие процессов (IPC)
Сигналы
Каналы (pipe)
Именованные каналы (FIFO)
Сообщения (messages)
Семафоры
Разделяемая память
Сокеты (socket)

Сигналы
Генерация сигнала
Особые ситуации
Терминальные прерывания (Del, Ctrl+C…)
Другие процессы (вызов kill)
Управление заданиями
Квоты
Уведомления
Алармы
Сигналы
Генерация сигнала
Особые ситуации
Терминальные прерывания (Del, Ctrl+C…)
Другие процессы (вызов kill)
Управление заданиями
Квоты
Уведомления
Алармы
Доставка и обработка сигнала
Ядро от имени процесса проверяет наличие сигнала
Если сигнал
Доставка и обработка сигнала
Ядро от имени процесса проверяет наличие сигнала
Если сигнал
#include
#include
#include
#include
// Handler
void my_hand()
{cout << "Handler\n";}
int main()
{
struct
#include
#include
#include
#include
// Handler
void my_hand()
{cout << "Handler\n";}
int main()
{
struct
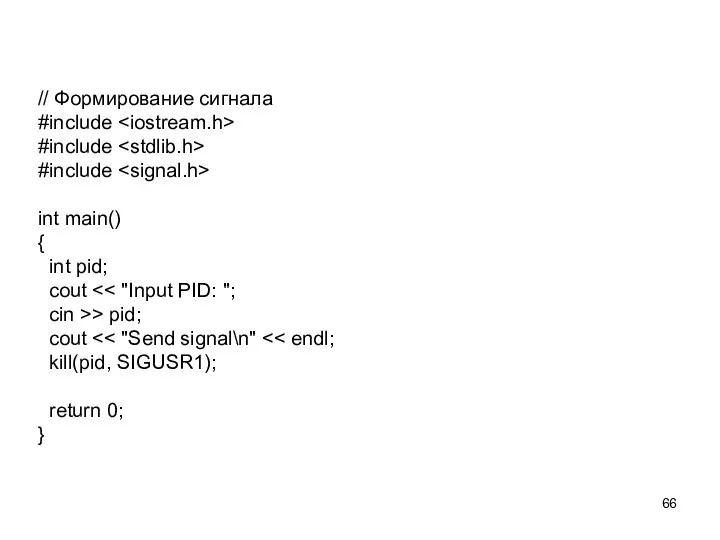
// Формирование сигнала
#include
#include
#include
int main()
{
int pid;
cout <<
// Формирование сигнала
#include
#include
#include
int main()
{
int pid;
cout <<
![Неименованные каналы (pipe) #include Int pipe(int fd[2]); процесс fd[1] fd[0] канал процесс ядро](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/755844/slide-66.jpg)
Неименованные каналы (pipe)
#include
Int pipe(int fd[2]);
процесс
fd[1]
fd[0]
канал
процесс
ядро
Неименованные каналы (pipe)
#include процесс fd[1] fd[0] канал процесс ядро
Int pipe(int fd[2]);

Канал после вызова fork()
Канал после вызова fork()

Родительский процесс
Дочерний процесс
fork
Канал
Односторонний канал
Родительский процесс
Дочерний процесс
fork
Канал
Односторонний канал
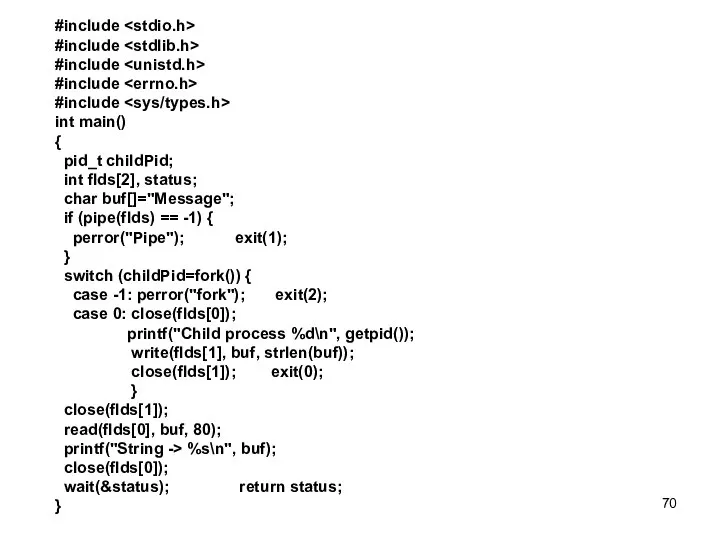
#include
#include
#include
#include
#include
int main()
{
pid_t childPid;
int flds[2],
#include
#include
#include
#include
#include
int main()
{
pid_t childPid;
int flds[2],
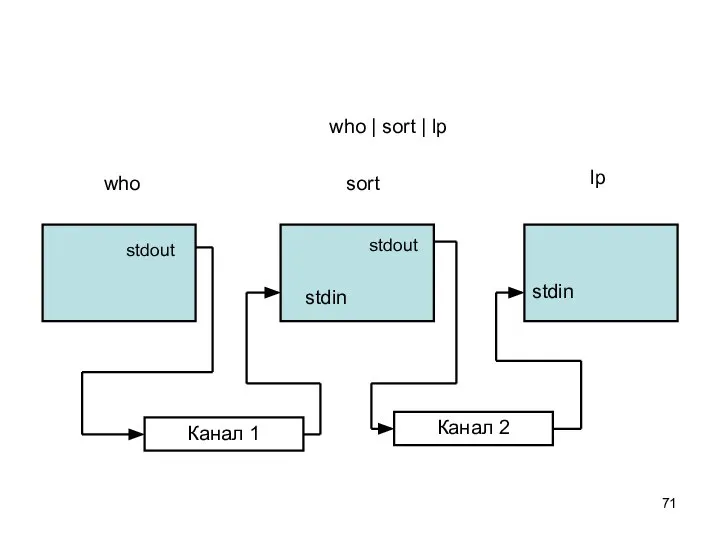
who | sort | lp
who
sort
lp
Канал 1
Канал 2
stdout
stdout
stdin
stdin
who | sort | lp
who
sort
lp
Канал 1
Канал 2
stdout
stdout
stdin
stdin
![родительский процесс дочерний процесс Канал 1 Канал 2 fd2[0] fd1[1] fd1[0]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/755844/slide-71.jpg)
родительский процесс
дочерний процесс
Канал 1
Канал 2
fd2[0]
fd1[1]
fd1[0]
fd2[1]
Двусторонняя передача по двум каналам
родительский процесс
дочерний процесс
Канал 1
Канал 2
fd2[0]
fd1[1]
fd1[0]
fd2[1]
Двусторонняя передача по двум каналам

Именованные каналы
#include
#include
int mkfifo(const char *pathname, mode_t mode);
При успешном звершении
Именованные каналы
#include
#include
int mkfifo(const char *pathname, mode_t mode);
При успешном звершении
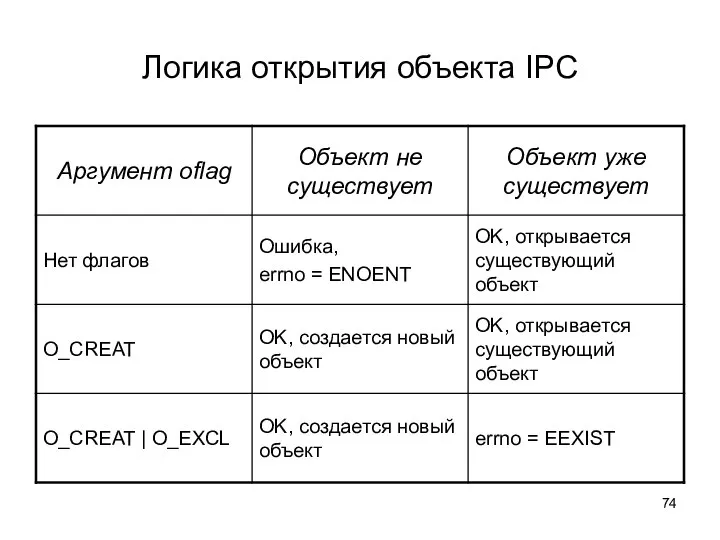
Логика открытия объекта IPC
Логика открытия объекта IPC
#include
#include
#include
#include
#include
#include
#define NAME " fifo_s.cc"
int main()
{
int
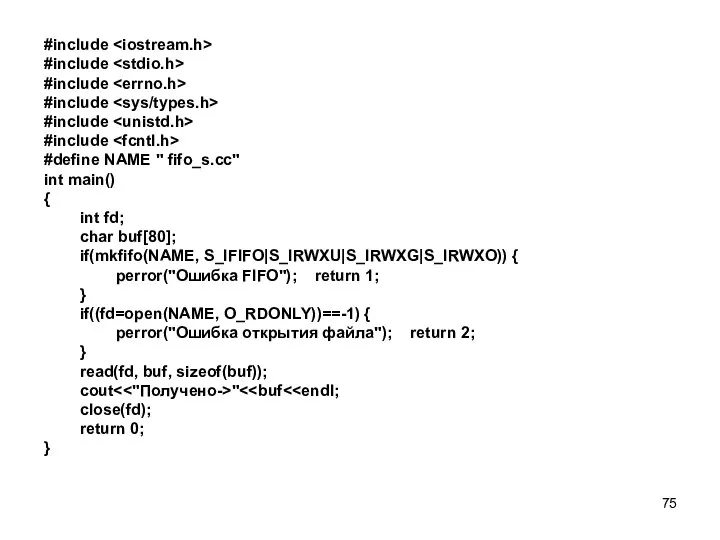
#include
#include
#include
#include
#include
#include
#define NAME " fifo_s.cc"
int main()
{
int

#include
#include
#include
#include
#include
#include
#include
#include
#define NAME "
#include
#include
#include
#include
#include
#include
#include
#include
#define NAME "

Создание ключей
#include
#include
key_t ftok(const char *pathname, int id);
Возвращает ключ, в
Создание ключей
#include
#include
key_t ftok(const char *pathname, int id);
Возвращает ключ, в

#include
#include
#include
#include
int main()
{
key_t key;
if((key = ftok("main.c",0))==-1)
#include
#include
#include
#include
int main()
{
key_t key;
if((key = ftok("main.c",0))==-1)

Управляющая структура IPC
struct ipc_perm {
uid_t uid; //идентификатор пользователя владельца
gid_t gid; //идентификатор группы владельца
uid_t
Управляющая структура IPC
struct ipc_perm {
uid_t uid; //идентификатор пользователя владельца
gid_t gid; //идентификатор группы владельца
uid_t
Сообщения (messages)
Ядро
Процесс А
Процесс Г
Процесс Б
Процесс В
А-В
А-В
А-Г
А-Г
В-Б
В-Б
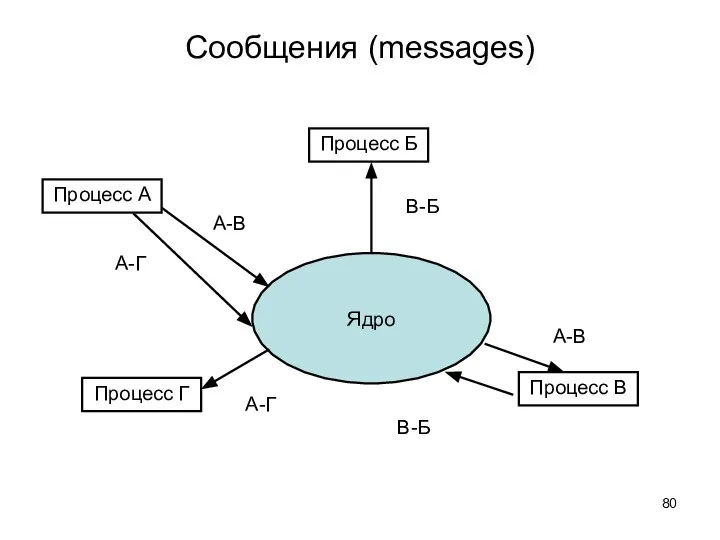
Сообщения (messages)
Ядро
Процесс А
Процесс Г
Процесс Б
Процесс В
А-В
А-В
А-Г
А-Г
В-Б
В-Б
Очереди сообщений
Таблица сообщений
Заголовок очереди msgid_ds
Область памяти ядра
msg_perm
msg_first msg_last
ipc_perm
struct msg
msg_next
msg_next
msg_spot
msg_spot
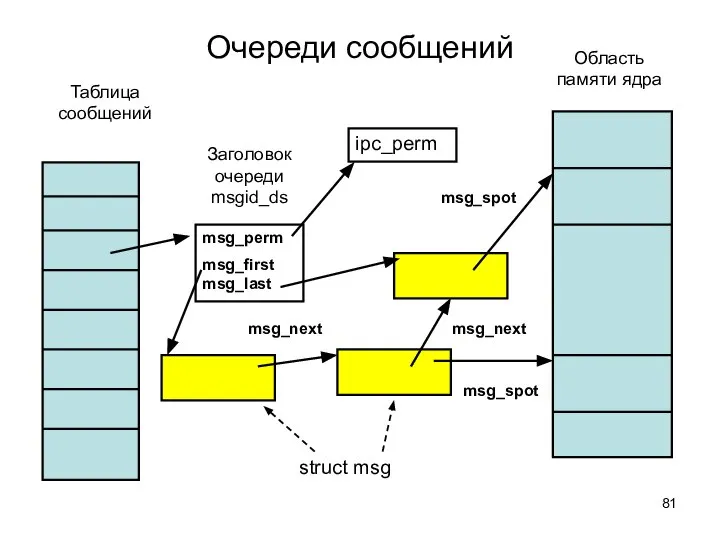
Очереди сообщений
Таблица сообщений
Заголовок очереди msgid_ds
Область памяти ядра
msg_perm
msg_first msg_last
ipc_perm
struct msg
msg_next
msg_next
msg_spot
msg_spot

Структуры данных
struct msgid_ds
Структуры данных
struct msgid_ds
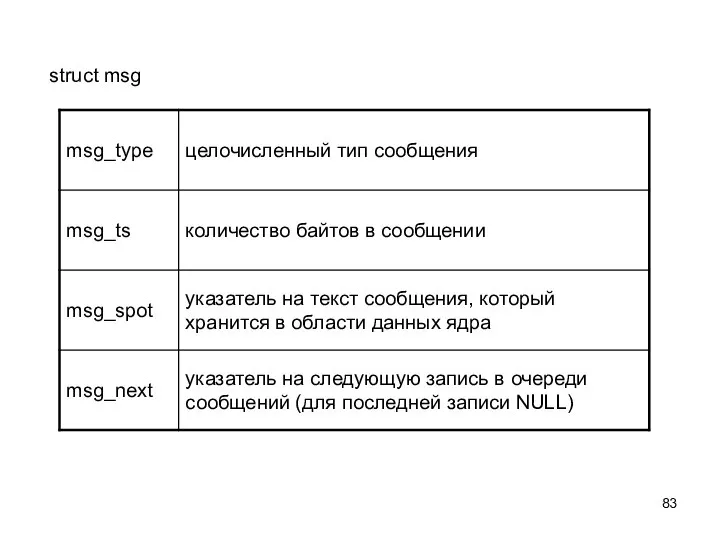
struct msg
struct msg
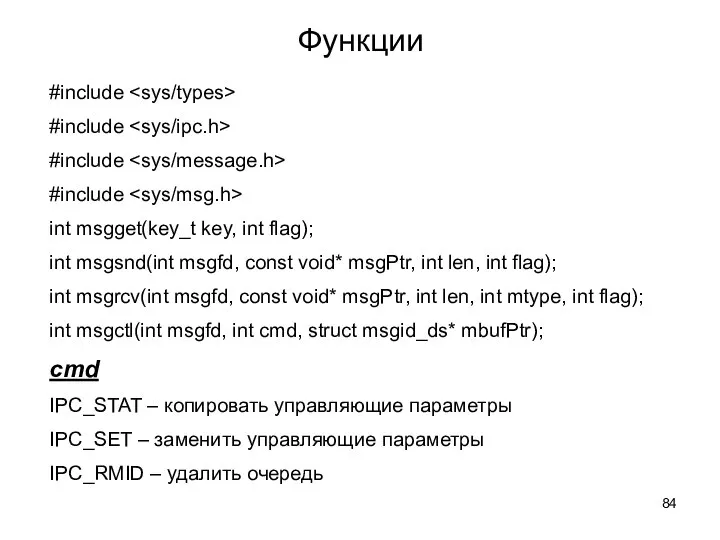
Функции
#include
#include
#include
#include
int msgget(key_t key, int flag);
int msgsnd(int
Функции
#include
#include
#include
#include
int msgget(key_t key, int flag);
int msgsnd(int
![/* mes.h */ #define PERM 0666 typedef struct msgbuf { long mtype; char buff[80]; } Message;](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/755844/slide-84.jpg)
/* mes.h */
#define PERM 0666
typedef struct msgbuf {
long mtype;
char buff[80];
} Message;
/* mes.h */
#define PERM 0666
typedef struct msgbuf {
long mtype;
char buff[80];
} Message;
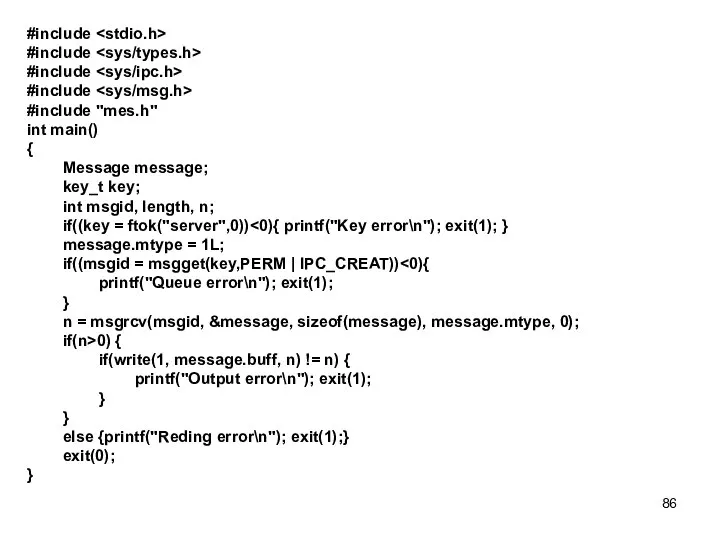
#include
#include
#include
#include
#include "mes.h"
int main()
{
Message message;
key_t key;
int msgid, length,
#include
#include
#include
#include
#include "mes.h"
int main()
{
Message message;
key_t key;
int msgid, length,

#include
#include
#include
#include
#include "mes.h"
int main()
{
Message message;
key_t key;
int msgid, length;
if((key
#include
#include
#include
#include
#include "mes.h"
int main()
{
Message message;
key_t key;
int msgid, length;
if((key

Семафоры
Таблица семафоров
struct sem
struct sem
sem_base
struct semid_ds
Семафоры
Таблица семафоров
struct sem
struct sem
sem_base
struct semid_ds
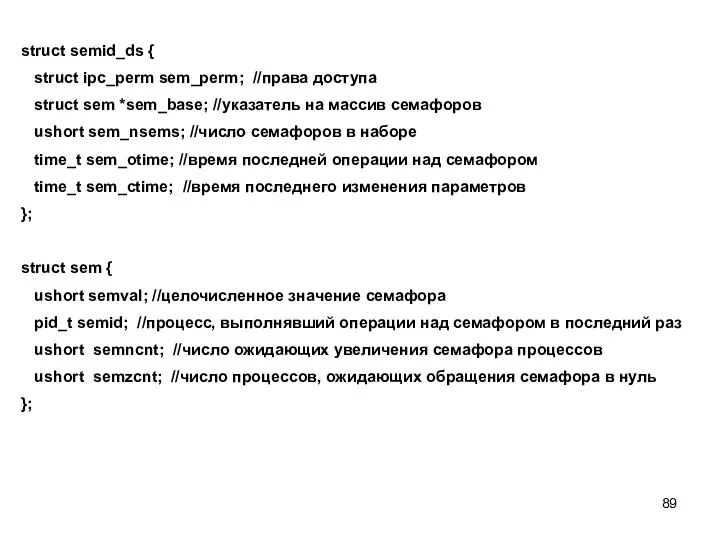
struct semid_ds {
struct ipc_perm sem_perm; //права доступа
struct sem *sem_base;
struct semid_ds {
struct ipc_perm sem_perm; //права доступа
struct sem *sem_base;

#include
#include
#include
int semget(key_t key, int num_sem, int flag);
flag –
#include
#include
#include
int semget(key_t key, int num_sem, int flag);
flag –

int semctl(int semfd; int num, int cmd, union semun arg);
union
int semctl(int semfd; int num, int cmd, union semun arg);
union
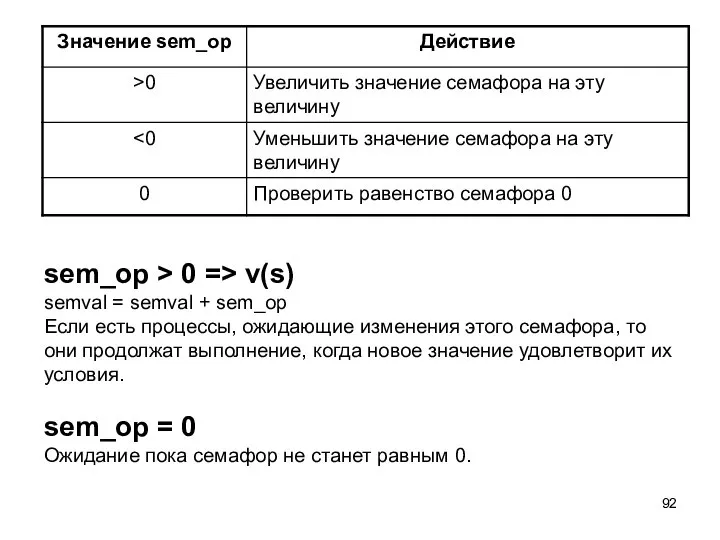
sem_op > 0 => v(s)
semval = semval + sem_op
Если есть процессы,
sem_op > 0 => v(s)
semval = semval + sem_op
Если есть процессы,

sem_op <0 => p(s)
if (semval >= abs(sem_op))
semval = semval – abs(sem_op)
else
if
sem_op <0 => p(s)
if (semval >= abs(sem_op))
semval = semval – abs(sem_op)
else
if
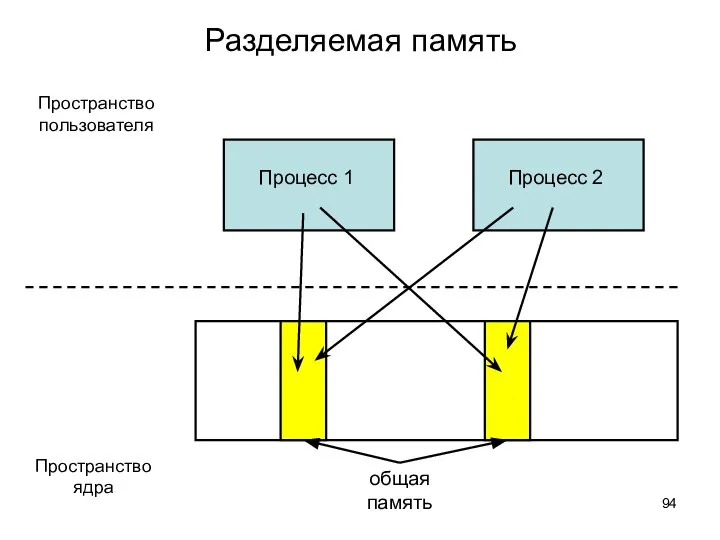
Разделяемая память
Пространство пользователя
Пространство ядра
общая память
Разделяемая память
Пространство пользователя
Пространство ядра
общая память
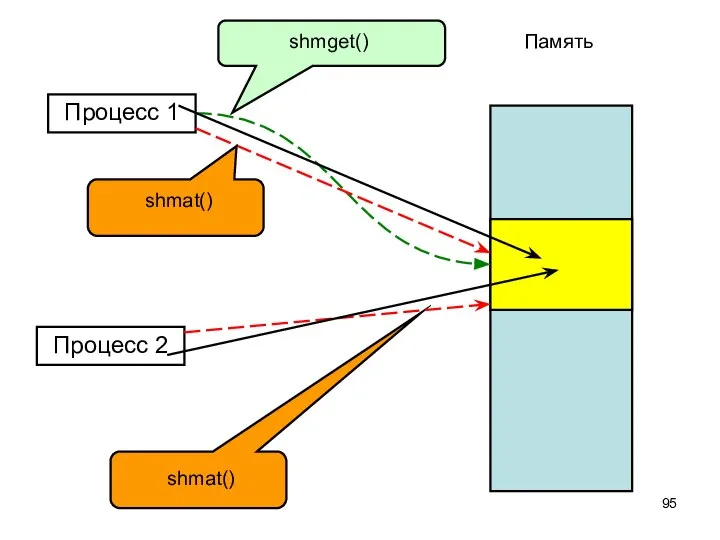
Процесс 1
Процесс 2
Память
shmget()
shmat()
shmat()
Процесс 1
Процесс 2
Память
shmget()
shmat()
shmat()

struct shmid_ds {
struct ipc_perm shm_perm; // режим и права доступа
struct shmid_ds {
struct ipc_perm shm_perm; // режим и права доступа

Функции
#include
int shmget(key_t key, size_t size, int shmflag);
void *shmat(int shmid,
Функции
#include
int shmget(key_t key, size_t size, int shmflag);
void *shmat(int shmid,

/* share.h */
#include
#include
#include
#include
#include
#include
#define SHMKEY1 (key_t)010
#define
/* share.h */
#include
#include
#include
#include
#include
#include
#define SHMKEY1 (key_t)010
#define

#include "share.h"
#define IFLAGS (IPC_CREAT | IPC_EXCL)
#define ERR ((struct databuf *) -1)
static
#include "share.h"
#define IFLAGS (IPC_CREAT | IPC_EXCL)
#define ERR ((struct databuf *) -1)
static

int getsem(void)
{
union semun x;
x.val = 0;
if((semid = semget(SEMKEY,
int getsem(void)
{
union semun x;
x.val = 0;
if((semid = semget(SEMKEY,

void reader(int semid, struct databuf *buf1, struct databuf *buf2)
{
for(;;) {
buf1->d_nread=read(0,buf1->d_buf, SIZ);
semop(semid,
void reader(int semid, struct databuf *buf1, struct databuf *buf2)
{
for(;;) {
buf1->d_nread=read(0,buf1->d_buf, SIZ);
semop(semid,

void writer(int semid, struct databuf *buf1, struct databuf *buf2)
{
for(;;) {
semop(semid, &p1,
void writer(int semid, struct databuf *buf1, struct databuf *buf2)
{
for(;;) {
semop(semid, &p1,
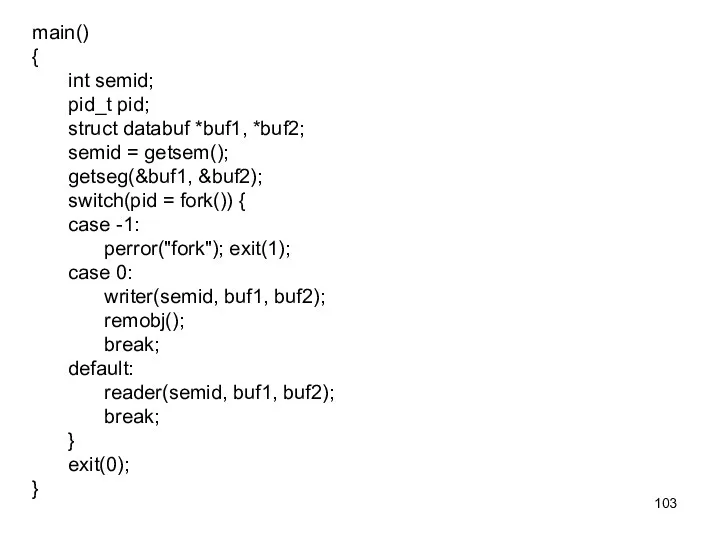
main()
{
int semid;
pid_t pid;
struct databuf *buf1, *buf2;
semid = getsem();
getseg(&buf1, &buf2);
switch(pid = fork())
main()
{
int semid;
pid_t pid;
struct databuf *buf1, *buf2;
semid = getsem();
getseg(&buf1, &buf2);
switch(pid = fork())

Процессы в ОС Windows
Процессы в ОС Windows
Особенности процессов
Процесс
виртуальное адресное пространство;
управляющая информация, необходимая для выполнения набора потоков
Особенности процессов
Процесс
виртуальное адресное пространство;
управляющая информация, необходимая для выполнения набора потоков
Потоки
Каждый процесс начинается с одного потока, но новые потоки могут создаваться
Потоки
Каждый процесс начинается с одного потока, но новые потоки могут создаваться
Волокна
Переключение потоков в операционной системе Windows занимает довольно много времени, так
Волокна
Переключение потоков в операционной системе Windows занимает довольно много времени, так
Создание процесса
Открывается файл образа (exe – файл)
Создается объект «процесс»
Создается первичный поток
Создание процесса
Открывается файл образа (exe – файл)
Создается объект «процесс»
Создается первичный поток

Новый процесс создается при помощи функции CreateProcess
Функция имеет 10 параметров:
1.
Новый процесс создается при помощи функции CreateProcess
Функция имеет 10 параметров:
1.
В операционной системе Windows не поддерживается какой-либо иерархии процессов, например
В операционной системе Windows не поддерживается какой-либо иерархии процессов, например

Создание потока
Каждый процесс в Windows создается с одним потоком
Процесс может позднее
Создание потока
Каждый процесс в Windows создается с одним потоком
Процесс может позднее
Планирование процессов
В операционной системе Windows нет центрального потока планирования.
Когда какой-либо
Планирование процессов
В операционной системе Windows нет центрального потока планирования.
Когда какой-либо

Приоритеты процессов
Классы приоритетов
реального времени
высокий
выше нормы
нормальный
ниже нормы
неработающий
Приоритеты потоков
критичный ко времени
самый высокий
выше
Приоритеты процессов
Классы приоритетов
реального времени
высокий
выше нормы
нормальный
ниже нормы
неработающий
Приоритеты потоков
критичный ко времени
самый высокий
выше
Взаимодействие процессов
каналы
байтовый режим
режим сообщений
именованные каналы
почтовые ящики
сокеты
вызов удаленной процедуры
совместно используемые файлы
Взаимодействие процессов
каналы
байтовый режим
режим сообщений
именованные каналы
почтовые ящики
сокеты
вызов удаленной процедуры
совместно используемые файлы

Механизмы синхронизации
семафоры
мьютексы
критические секции
события
Механизмы синхронизации
семафоры
мьютексы
критические секции
события
 Основы логики
Основы логики Лекция 6. Форматы графических файлов: растровые, векторные. Форматы BMP, PCX, TGA
Лекция 6. Форматы графических файлов: растровые, векторные. Форматы BMP, PCX, TGA Тёмная сторона сети
Тёмная сторона сети Первые компьютерные вирусы
Первые компьютерные вирусы База данных и информационная система. Реляционные базы данных
База данных и информационная система. Реляционные базы данных Презентация на тему Устройства ввода-вывода
Презентация на тему Устройства ввода-вывода  Безопасный Интернет
Безопасный Интернет HTML #1
HTML #1 Этапы проектирования базы данных
Этапы проектирования базы данных Классы и объекты. Объектно - ориентированное программирование
Классы и объекты. Объектно - ориентированное программирование Service desk front description
Service desk front description Геоинформационные системы – ГИС. Автор: Дуракова Л.В МБОУ»Ключевская СОШ» Оренбургская область Тюльганский район село Ключи
Геоинформационные системы – ГИС. Автор: Дуракова Л.В МБОУ»Ключевская СОШ» Оренбургская область Тюльганский район село Ключи Пакет дидактических материалов для уроков информатики в 5 классе
Пакет дидактических материалов для уроков информатики в 5 классе Архитектура ЭВМ
Архитектура ЭВМ Дистанционное обучение B2C. Для сотрудников ДОК. Базовый уровень
Дистанционное обучение B2C. Для сотрудников ДОК. Базовый уровень Введение в генерацию исходного кода в Rose. (Тема 8)
Введение в генерацию исходного кода в Rose. (Тема 8) Утилиты ОС. Текстовый редактор
Утилиты ОС. Текстовый редактор Группа ГАЗ - Поставщик (электронный документооборот в управлении заказами)
Группа ГАЗ - Поставщик (электронный документооборот в управлении заказами) Администрирование в информационных системах Администрирование ОС Групповые политики доменов Объекты групповых политик (GPO)
Администрирование в информационных системах Администрирование ОС Групповые политики доменов Объекты групповых политик (GPO)  Автоматизированные рабочие места для работников дистанции СЦБ
Автоматизированные рабочие места для работников дистанции СЦБ Печать в системе СМИ
Печать в системе СМИ Информационное моделирование
Информационное моделирование Ақпараттық процеске рұқсатсыз кірісуден сақтану
Ақпараттық процеске рұқсатсыз кірісуден сақтану Цифровая обработка сигналов
Цифровая обработка сигналов Презентация "Основные классы мер процедурного уровня" - скачать презентации по Информатике
Презентация "Основные классы мер процедурного уровня" - скачать презентации по Информатике Объектно-ориентированное программирование. Язык Python
Объектно-ориентированное программирование. Язык Python Администрирование школы
Администрирование школы Презентация "Проектная деятельность" - скачать презентации по Информатике
Презентация "Проектная деятельность" - скачать презентации по Информатике