- Задачи линейного программирования. (Тема 3)

Содержание
- 2. Для задач линейного программирования характерно наличие следующих 3-х компонентов: целевая функция; система ограничений; ограничения на знак
- 3. если он удовлетворяет ограничениям (2) и (3). называется допустимым планом ЗЛП, Вектор Вектор называется оптимальным планом
- 4. Формы записи ЗЛП 1) Развёрнутая форма записи:
- 5. 2) Матричная форма записи ЗЛП: (1) (2) (3) 3) Векторная форма записи ЗЛП:
- 6. Каноническая форма записи ЗЛП (1) (2) В системе ограничений стоят знаки только равенства. (3) (4) В
- 7. Приведение ЗЛП к канонической форме 1) max z’=-z, 2) Если в ограничении стоит знак то к
- 9. Скачать презентацию
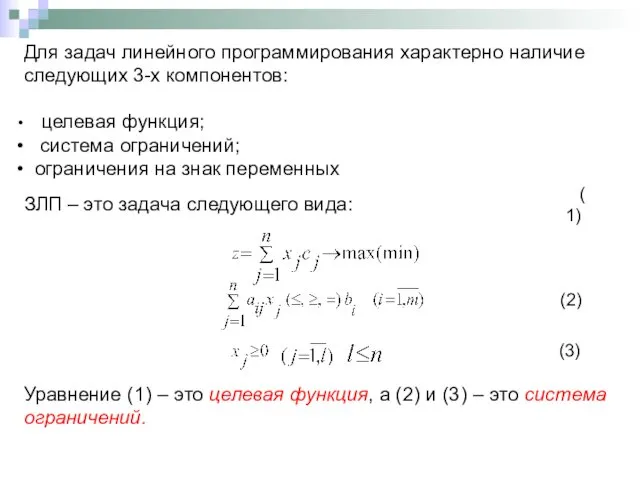
Для задач линейного программирования характерно наличие следующих 3-х компонентов:
целевая функция;
Для задач линейного программирования характерно наличие следующих 3-х компонентов:
целевая функция;

если он удовлетворяет ограничениям (2) и (3).
называется допустимым планом
если он удовлетворяет ограничениям (2) и (3).
называется допустимым планом

Формы записи ЗЛП
1) Развёрнутая форма записи:
Формы записи ЗЛП
1) Развёрнутая форма записи:
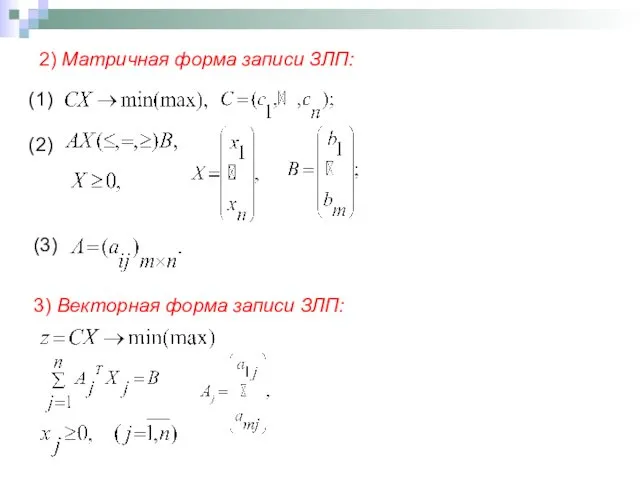
2) Матричная форма записи ЗЛП:
(1)
(2)
(3)
3) Векторная форма записи
2) Матричная форма записи ЗЛП:
(1)
(2)
(3)
3) Векторная форма записи

Каноническая форма записи ЗЛП
(1)
(2)
В системе ограничений стоят знаки
Каноническая форма записи ЗЛП
(1)
(2)
В системе ограничений стоят знаки

Приведение ЗЛП к канонической форме
1) max z’=-z,
2)
Если в ограничении
Приведение ЗЛП к канонической форме
1) max z’=-z,
2)
Если в ограничении
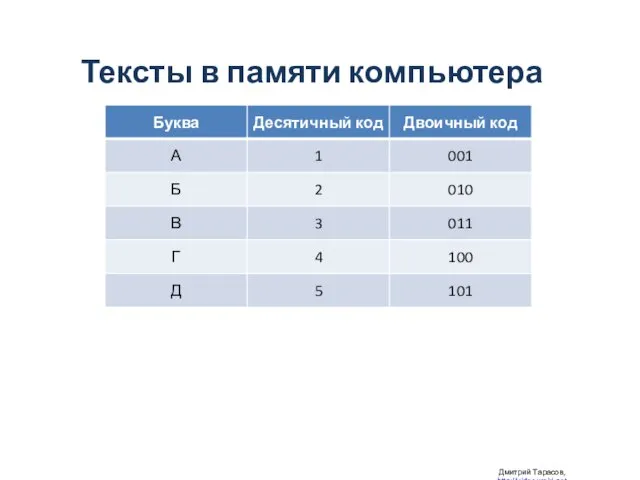 Тексты в памяти компьютера
Тексты в памяти компьютера An Introduction ToMobile Technologies and Services
An Introduction ToMobile Technologies and Services Презентация "Причины сбоя работы ЭВМ" - скачать презентации по Информатике
Презентация "Причины сбоя работы ЭВМ" - скачать презентации по Информатике Работа с табличным контентом
Работа с табличным контентом Освоение возможностей Power Point
Освоение возможностей Power Point Определение потребности в информации и организация ее сбора
Определение потребности в информации и организация ее сбора Нормализация базы данных
Нормализация базы данных Архитектура ИС Лекция №3 ФУНКЦИОНИРОВАНИЕ ЭВМ
Архитектура ИС Лекция №3 ФУНКЦИОНИРОВАНИЕ ЭВМ Диаграммы состояний
Диаграммы состояний Презентация "MSC.Patran PAT 318 2002 - 16" - скачать презентации по Информатике
Презентация "MSC.Patran PAT 318 2002 - 16" - скачать презентации по Информатике Язык SQL для работы с базами данных
Язык SQL для работы с базами данных Настройка Личного кабинета на портале Работа в России
Настройка Личного кабинета на портале Работа в России Политика информационной безопасности
Политика информационной безопасности Решение расчётной задачи в среде электронной таблицы EXCEL
Решение расчётной задачи в среде электронной таблицы EXCEL Правила Безопасности в интернете
Правила Безопасности в интернете Группа: Сидоренко В. Березин А. Сахарнов Д. Белов В. Сороцкий А. Петрося
Группа: Сидоренко В. Березин А. Сахарнов Д. Белов В. Сороцкий А. Петрося Сокеты. Цели и задачи
Сокеты. Цели и задачи Презентация "Информация" - скачать презентации по Информатике_
Презентация "Информация" - скачать презентации по Информатике_ Архитектура персонального компьютера
Архитектура персонального компьютера Основные сведения о Web-странице. Язык HTML
Основные сведения о Web-странице. Язык HTML Programmy i servisy 1S dlya avtomatizacii roznichnoj torgovli
Programmy i servisy 1S dlya avtomatizacii roznichnoj torgovli Работа с программным обеспечением
Работа с программным обеспечением Ехнологии локальных сетей
Ехнологии локальных сетей «Представление о формуле. Встроенные функции» Муниципальное общеобразовательное учреждение гимназия №1 г.Липецка Попова Маргар
«Представление о формуле. Встроенные функции» Муниципальное общеобразовательное учреждение гимназия №1 г.Липецка Попова Маргар Минимальные требования компьютера для ОС Windows. Архитектура ОС Windows
Минимальные требования компьютера для ОС Windows. Архитектура ОС Windows Геометрическое моделирование в графических редакторах на примере редактора Paint
Геометрическое моделирование в графических редакторах на примере редактора Paint Языки исполнения. Базы данных. Библиотеки и фреймворки. Платформы. (Урок 4)
Языки исполнения. Базы данных. Библиотеки и фреймворки. Платформы. (Урок 4) Информационно-библиографический отдел в библиотеке им. А.С. Пушкина
Информационно-библиографический отдел в библиотеке им. А.С. Пушкина