- Методы решения систем нелинейных уравнений

Содержание
- 2. Введем обозначения
- 3. Тогда исходную систему запишем относительно векторной функции F векторного аргумента Следовательно, исходную задачу можно рассматривать как
- 4. Однако, переход от к вносит в задачу нахождения нулей свою специфику. Метод Ньютона решения систем нелинейных
- 5. или в компактной форме: Для задачи о неподвижной точке нелинейного отображения запишем
- 6. формальное равенство: где определяет метод простых итераций и Пусть известно - е приближение одного из изолированных
- 7. Тогда точный корень уравнения можно представить: где поправка (погрешность корня). Имеем Предполагая, что непрерывно дифференцируема в
- 8. членами Под производной следует понимать матрицу Якоби системы функций относительно переменных т.е.
- 9. Тогда Если то Следовательно, метод Ньютона для решения исходной системы состоит в построении итерационной последовательности: k=0,1,2,
- 10. Пример. Найти методом Ньютона решение системы уравнений исходя из начального приближения
- 11. Полагая имеем
- 12. Подставляя данные, получаем Составим матрицу Якоби:
- 13. При этом Т.к. то найдем обратную ей матрицу
- 14. Получим первое приближение:
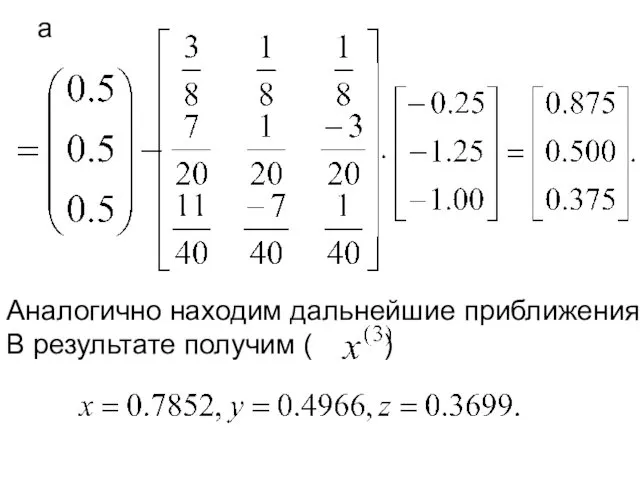
- 15. а Аналогично находим дальнейшие приближения В результате получим ( )
- 16. Решение нелинейных систем методами спуска Общий недостаток всех рассмотренных ранее методов решения систем нелинейных уравнений состоит
- 17. Пусть задана система Образуем новую функцию Т.к. эта функция не отрицательна, то всегда найдется точка такая,
- 19. Т.е., если удается получить точку минимизирующую функцию и если при этом окажется, что то точка истинное
- 20. Последовательность точек приближений к точке минимума функции получают по формуле где вектор, определяющий направление минимизации, а
- 21. Исходя из геометрического смысла задачи, итерационный метод называется методом спуска. При выборе направления спуска определяющим является
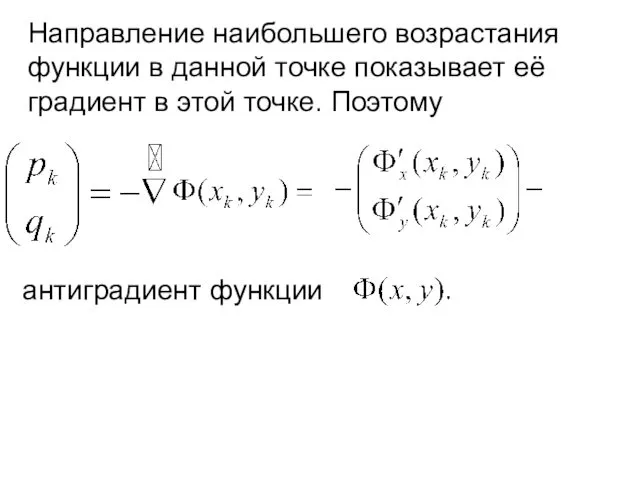
- 22. Направление наибольшего возрастания функции в данной точке показывает её градиент в этой точке. Поэтому антиградиент функции
- 23. Тогда суть градиентного метода Достоинство градиентного метода решения нелинейных систем – глобальная сходимость. Главный недостаток –
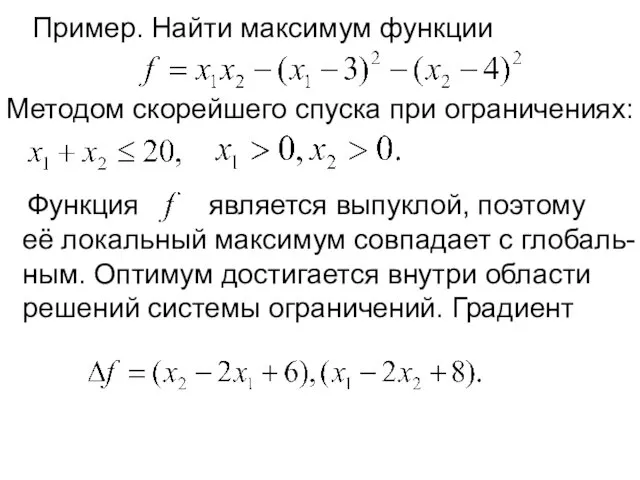
- 24. Пример. Найти максимум функции Методом скорейшего спуска при ограничениях: Функция является выпуклой, поэтому её локальный максимум
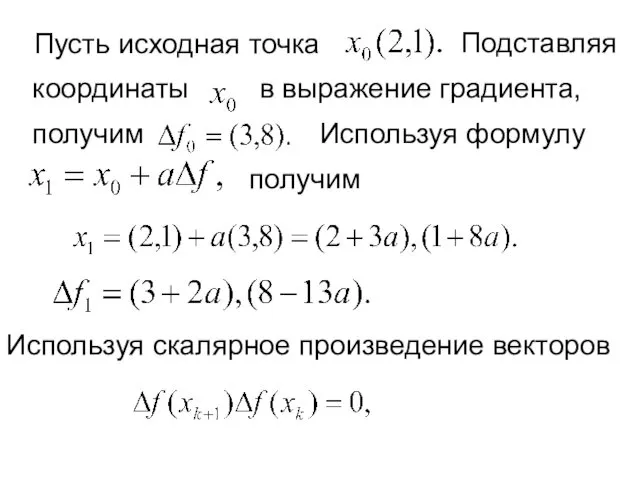
- 25. Пусть исходная точка Подставляя координаты в выражение градиента, получим Используя формулу получим Используя скалярное произведение векторов
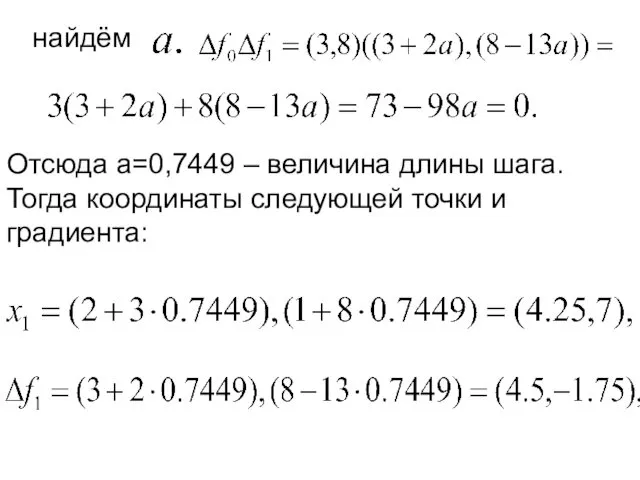
- 26. найдём Отсюда а=0,7449 – величина длины шага. Тогда координаты следующей точки и градиента:
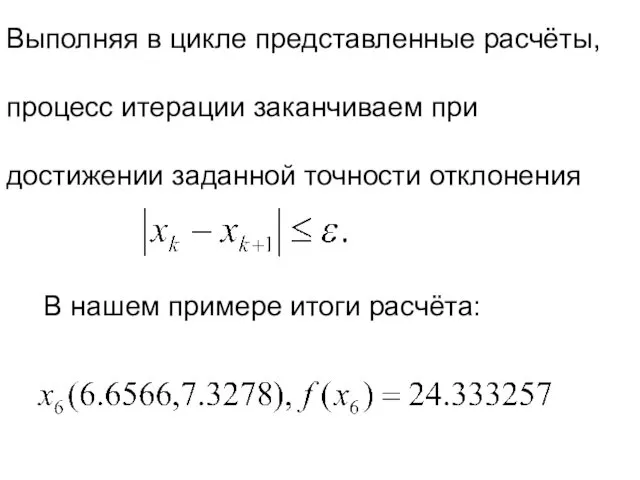
- 27. Выполняя в цикле представленные расчёты, процесс итерации заканчиваем при достижении заданной точности отклонения В нашем примере
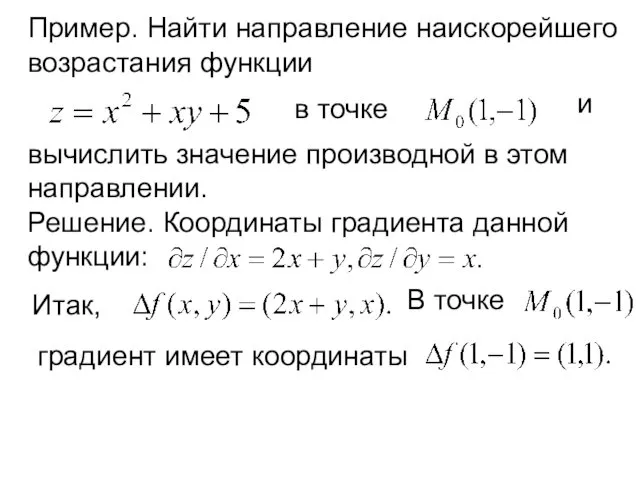
- 28. Пример. Найти направление наискорейшего возрастания функции в точке и вычислить значение производной в этом направлении. Решение.
- 30. Скачать презентацию
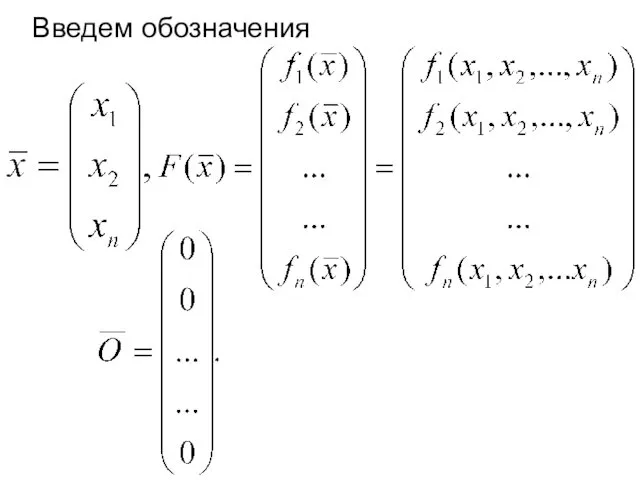
Введем обозначения
Введем обозначения
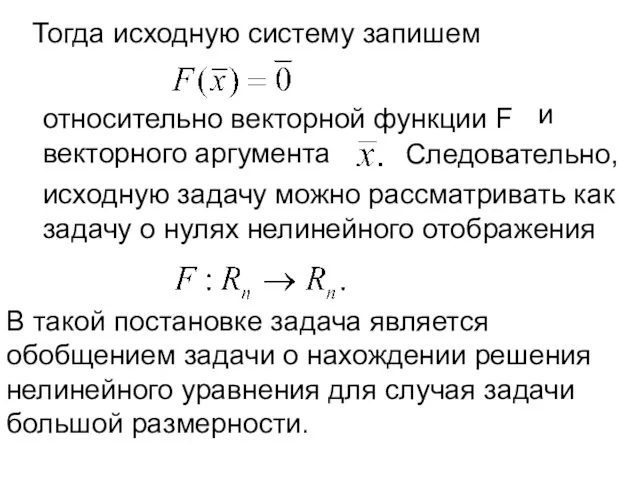
Тогда исходную систему запишем
относительно векторной функции F
векторного аргумента
Следовательно,
исходную задачу можно
Тогда исходную систему запишем
относительно векторной функции F
векторного аргумента
Следовательно,
исходную задачу можно
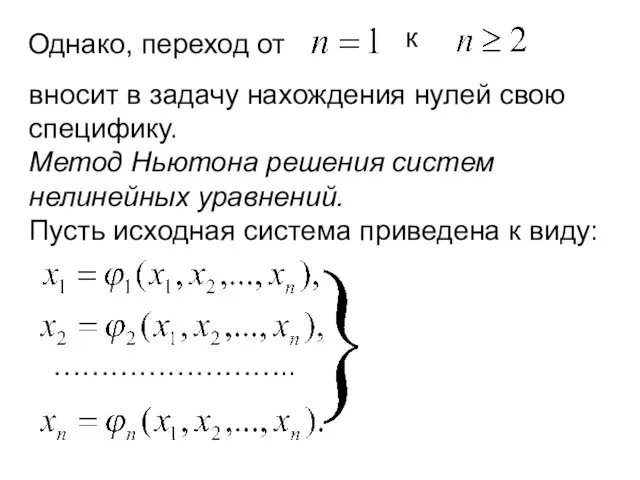
Однако, переход от
к
вносит в задачу нахождения нулей свою
специфику.
Метод Ньютона решения
Однако, переход от
к
вносит в задачу нахождения нулей свою
специфику.
Метод Ньютона решения

или в компактной форме:
Для задачи о неподвижной точке нелинейного
отображения
запишем
или в компактной форме:
Для задачи о неподвижной точке нелинейного
отображения
запишем

формальное равенство:
где
определяет метод простых
итераций и
Пусть известно
- е приближение
одного из
формальное равенство:
где
определяет метод простых
итераций и
Пусть известно
- е приближение
одного из
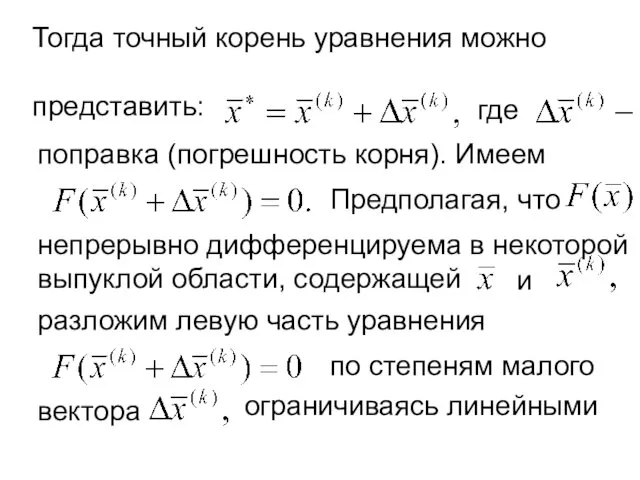
Тогда точный корень уравнения можно
представить:
где
поправка (погрешность корня). Имеем
Предполагая, что
непрерывно дифференцируема
Тогда точный корень уравнения можно
представить:
где
поправка (погрешность корня). Имеем
Предполагая, что
непрерывно дифференцируема

членами
Под производной
следует понимать
матрицу Якоби системы функций
относительно переменных
т.е.
членами
Под производной
следует понимать
матрицу Якоби системы функций
относительно переменных
т.е.

Тогда
Если
то
Следовательно, метод Ньютона для решения
исходной системы состоит в построении
итерационной
Тогда
Если
то
Следовательно, метод Ньютона для решения
исходной системы состоит в построении
итерационной
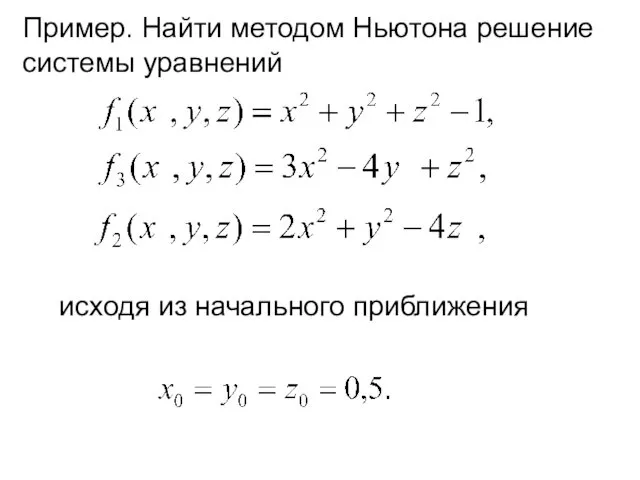
Пример. Найти методом Ньютона решение
системы уравнений
исходя из начального приближения
Пример. Найти методом Ньютона решение
системы уравнений
исходя из начального приближения

Полагая
имеем
Полагая
имеем
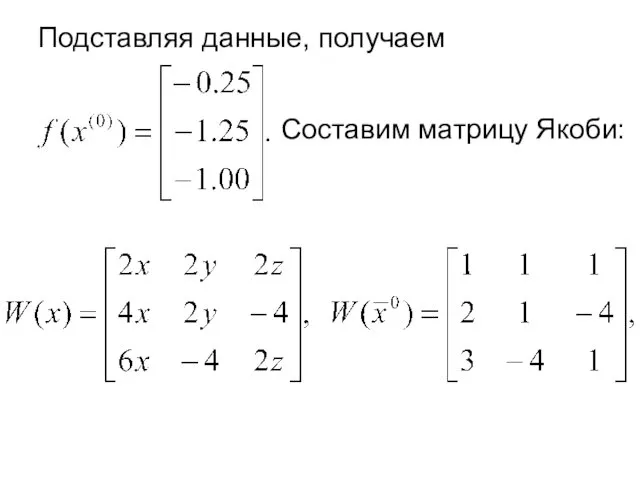
Подставляя данные, получаем
Составим матрицу Якоби:
Подставляя данные, получаем
Составим матрицу Якоби:
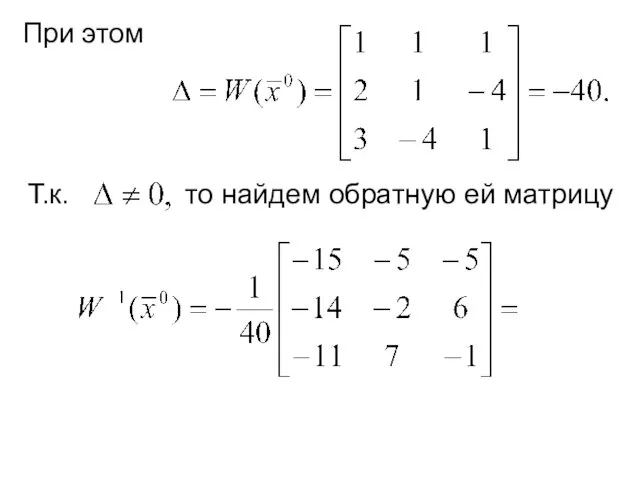
При этом
Т.к.
то найдем обратную ей матрицу
При этом
Т.к.
то найдем обратную ей матрицу
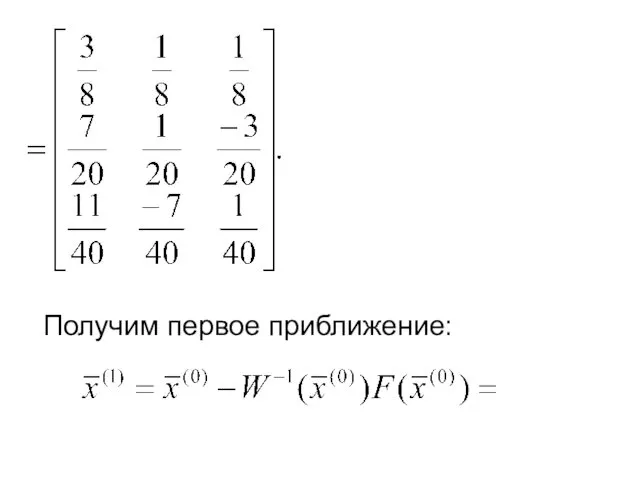
Получим первое приближение:
Получим первое приближение:
а
Аналогично находим дальнейшие приближения
В результате получим ( )
а
Аналогично находим дальнейшие приближения
В результате получим ( )
Решение нелинейных систем методами спуска
Общий недостаток всех рассмотренных ранее
методов решения систем
Решение нелинейных систем методами спуска
Общий недостаток всех рассмотренных ранее
методов решения систем
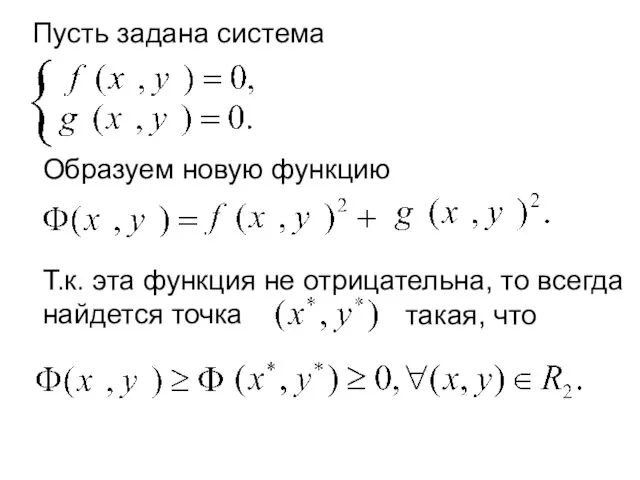
Пусть задана система
Образуем новую функцию
Т.к. эта функция не отрицательна, то всегда
найдется
Пусть задана система
Образуем новую функцию
Т.к. эта функция не отрицательна, то всегда
найдется

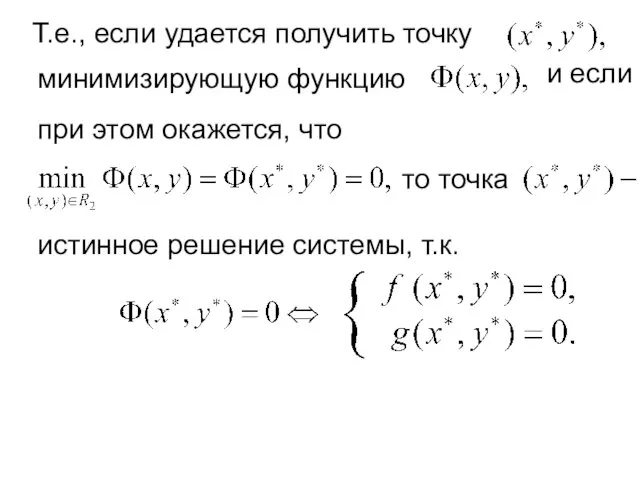
Т.е., если удается получить точку
минимизирующую функцию
и если
при этом окажется, что
то
Т.е., если удается получить точку
минимизирующую функцию
и если
при этом окажется, что
то
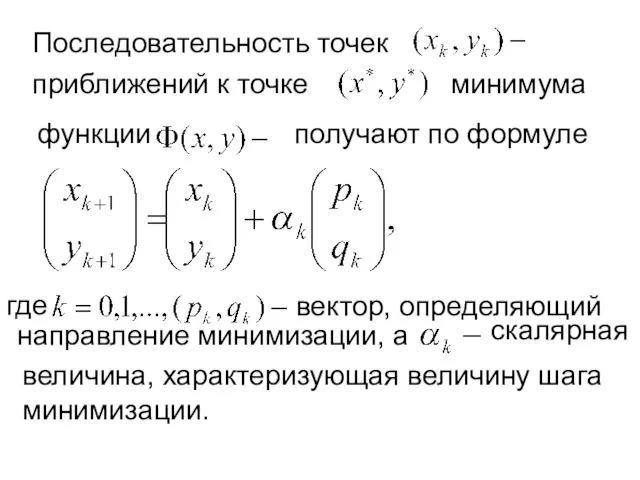
Последовательность точек
приближений к точке
минимума
функции
получают по формуле
где
вектор, определяющий
направление минимизации, а
скалярная
величина, характеризующая
Последовательность точек
приближений к точке
минимума
функции
получают по формуле
где
вектор, определяющий
направление минимизации, а
скалярная
величина, характеризующая
Исходя из геометрического смысла задачи,
итерационный метод называется методом
спуска. При выборе направления
Исходя из геометрического смысла задачи,
итерационный метод называется методом
спуска. При выборе направления
Направление наибольшего возрастания
функции в данной точке показывает её
градиент в этой точке.
Направление наибольшего возрастания
функции в данной точке показывает её
градиент в этой точке.

Тогда суть градиентного метода
Достоинство градиентного метода решения
нелинейных систем – глобальная сходимость.
Главный
Тогда суть градиентного метода
Достоинство градиентного метода решения
нелинейных систем – глобальная сходимость.
Главный
Пример. Найти максимум функции
Методом скорейшего спуска при ограничениях:
Функция
является выпуклой, поэтому
её
Пример. Найти максимум функции
Методом скорейшего спуска при ограничениях:
Функция
является выпуклой, поэтому
её
Пусть исходная точка
Подставляя
координаты
в выражение градиента,
получим
Используя формулу
получим
Используя скалярное произведение векторов
Пусть исходная точка
Подставляя
координаты
в выражение градиента,
получим
Используя формулу
получим
Используя скалярное произведение векторов
найдём
Отсюда а=0,7449 – величина длины шага.
Тогда координаты следующей точки и
градиента:
найдём
Отсюда а=0,7449 – величина длины шага.
Тогда координаты следующей точки и
градиента:
Выполняя в цикле представленные расчёты,
процесс итерации заканчиваем при
достижении заданной точности отклонения
В
Выполняя в цикле представленные расчёты,
процесс итерации заканчиваем при
достижении заданной точности отклонения
В
Пример. Найти направление наискорейшего
возрастания функции
в точке
и
вычислить значение производной в этом
направлении.
Решение. Координаты
Пример. Найти направление наискорейшего
возрастания функции
в точке
и
вычислить значение производной в этом
направлении.
Решение. Координаты
 Методическая разработка раздела образовательной программы по математике «Квадратные уравнения». 8 класс
Методическая разработка раздела образовательной программы по математике «Квадратные уравнения». 8 класс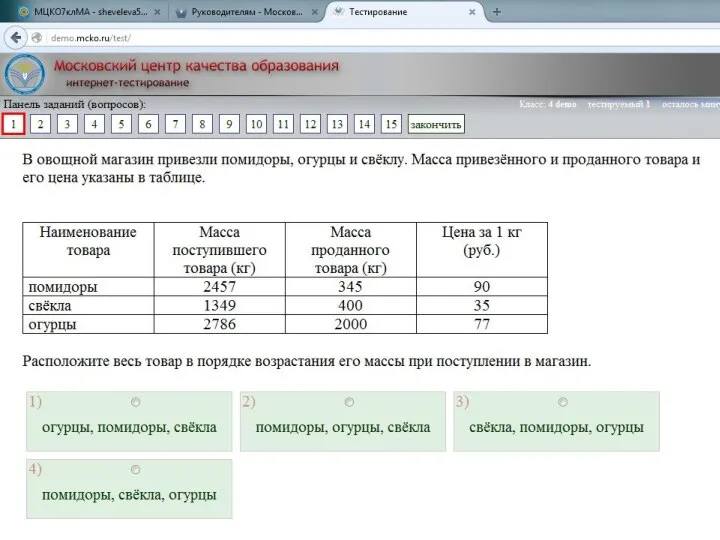 Московский центр качества образования. Интернет-тестирование
Московский центр качества образования. Интернет-тестирование Задачі з геометрії за готовими малюнками
Задачі з геометрії за готовими малюнками Машинное обучение и анализ данных. Линейные модели. Логистическая регрессия
Машинное обучение и анализ данных. Линейные модели. Логистическая регрессия Функция у=arccos x
Функция у=arccos x Великие о математике
Великие о математике Додавання і віднімання в межех 20. Веселий потяг
Додавання і віднімання в межех 20. Веселий потяг Тест по теме: "Конус"
Тест по теме: "Конус" Предмет, метод, задачи статистики и принципы организации государственной статистики в РФ
Предмет, метод, задачи статистики и принципы организации государственной статистики в РФ Матричний підхід до лінійної багатофакторної моделі
Матричний підхід до лінійної багатофакторної моделі Презентация по математике "Отрезок. Длина отрезка. Треугольник. Задания по теме" - скачать
Презентация по математике "Отрезок. Длина отрезка. Треугольник. Задания по теме" - скачать  Решение квадратных неравенств
Решение квадратных неравенств Деление числа на произведение
Деление числа на произведение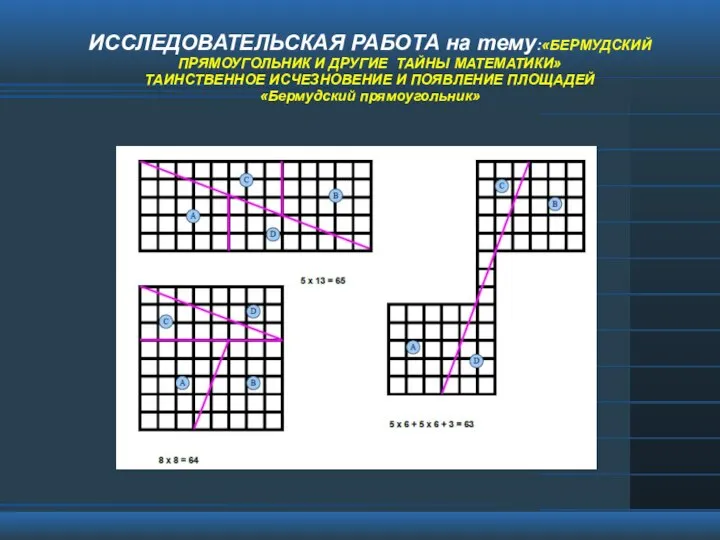 «Бермудский прямоугольник и другие тайны математики», таинственное исчезновение и появление площадей
«Бермудский прямоугольник и другие тайны математики», таинственное исчезновение и появление площадей Детерминационный, факторный и кластерный анализ
Детерминационный, факторный и кластерный анализ Виды многогранников
Виды многогранников Простейшие задачи в координатах
Простейшие задачи в координатах Жозеф Луи Лагранж (1736-1813)
Жозеф Луи Лагранж (1736-1813) Введение в компьютерный и интеллектуальный анализ данных (ВКИАД). Типы статистических данных и способы их первичной обработки
Введение в компьютерный и интеллектуальный анализ данных (ВКИАД). Типы статистических данных и способы их первичной обработки Деление с остатком. 5 класс
Деление с остатком. 5 класс Аттестационная работа. Решение задач повышенной сложности
Аттестационная работа. Решение задач повышенной сложности Признаки делимости на 2, 5, 10 (5 класс) - Презентация
Признаки делимости на 2, 5, 10 (5 класс) - Презентация Логические задачи
Логические задачи Линейное уравнение с двумя переменными
Линейное уравнение с двумя переменными Золотое сечение в искусстве. Золотое сечение в живописи и фотографии
Золотое сечение в искусстве. Золотое сечение в живописи и фотографии Основное свойство дроби
Основное свойство дроби 7 класс МБСЛШ им. Ю.А. Гагарина Учитель: И.А. Глазырина
7 класс МБСЛШ им. Ю.А. Гагарина Учитель: И.А. Глазырина  Приемы устного счета Учитель математики Бадюк Ольга Ярославна, МКОУ «Москаленский лицей»
Приемы устного счета Учитель математики Бадюк Ольга Ярославна, МКОУ «Москаленский лицей»