СУИМ. Лекция 2. Обобщенная функциональная схема СУИМ. Математическое описание функциональных элементов СУИМ
- СУИМ. Лекция 2. Обобщенная функциональная схема СУИМ. Математическое описание функциональных элементов СУИМ

Содержание
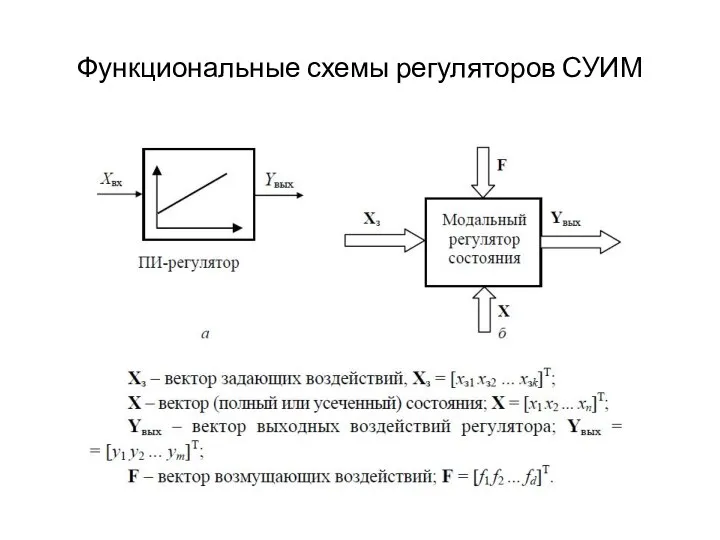
- 2. Обобщенная функциональная схема Обобщенная функциональная схема системы управления: Xз – вектор задающих воздействий; Y – вектор
- 3. Обобщенная функциональная схема локальной электромеханической системы управления УЗ – устройство задания СПЭ – силовые преобразователи энергии
- 4. Статические и динамические режимы и характеристики Статические режимы СУИМ характеризуются установившимися состояниями при неизменных входных воздействиях.Уравнения
- 6. Синтез и анализ СУИМ К основным задачам синтеза СУИМ (функциям НИР) относят следующие: – определение адекватной
- 7. Математическое описание ОУ – определение структуры и параметров ОУ, наиболее существенно влияющих на его статические и
- 8. Формулирование критерия качества управления целевая функция, цель управления, функционал качества, оценка качества управления. К числу формальных
- 9. Синтез СУИМ Нахождение ее структуры и параметров, обеспечивающих заданное качество управления при известных входных воздействиях
- 10. Анализ синтезированной СУИМ Результат анализа должен дать ответ на вопрос, соответствует ли синтезированная СУИМ требуемому качеству
- 11. Задача анализа СУИМ предполагает в общем случае решение нескольких подзадач: – определение ММ СУИМ, отражающей ее
- 12. при анализе СУИМ используется – математическое моделирование (цифровое, аналоговое, цифроаналоговое); – полунатурное моделирование (симбиоз математической модели
- 13. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ФУНКЦИОНАЛЬНЫХ ЭЛЕМЕНТОВ СУИМ
- 14. Исполнительные механизмы
- 16. Электрические исполнительные механизмы постоянной скорости
- 18. Приводы К приводам ЭИМ относятся следующие типы двигателей: – коллекторные двигатели постоянного тока (ДПТ); – бесколлекторные
- 19. Функциональная схема (а) и схемы замещения (б, в, г) электродвигателя постоянного тока Тэ, Тв – электромагнитные
- 22. где ΔЕд , ΔМ – приращения координат ЭДС двигателя и электромагнитного момента ΔФ – приращение магнитного
- 24. Векторно-матричное описание ДПТ как объекта регулирования по цепи якоря
- 26. Асинхронные двигатели.
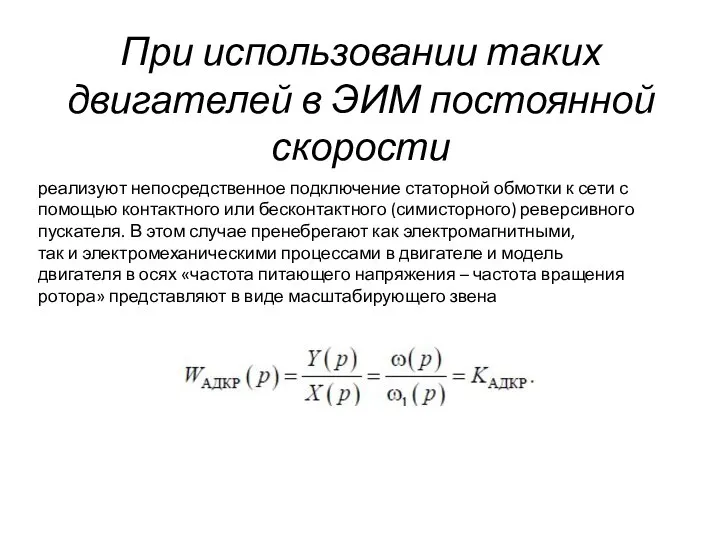
- 27. При использовании таких двигателей в ЭИМ постоянной скорости реализуют непосредственное подключение статорной обмотки к сети с
- 28. При использовании таких двигателей в ЭИМ переменной скорости реализуют либо фазовое, либо частотное управление
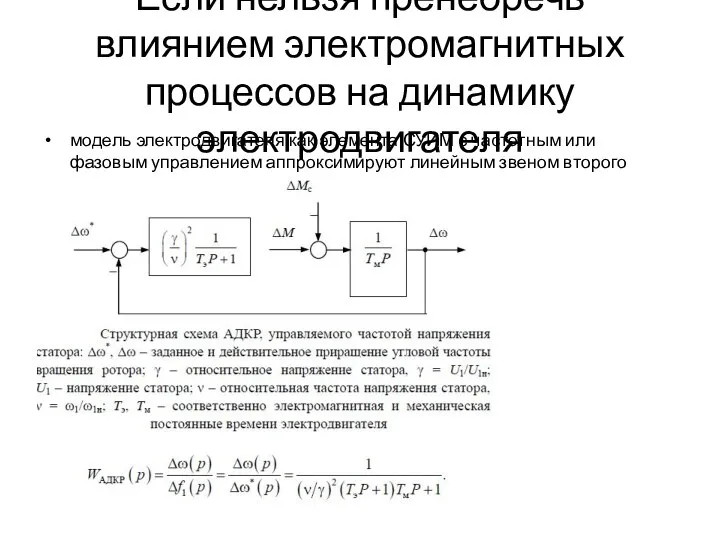
- 29. Если нельзя пренебречь влиянием электромагнитных процессов на динамику электродвигателя модель электродвигателя как элемента СУИМ с частотным
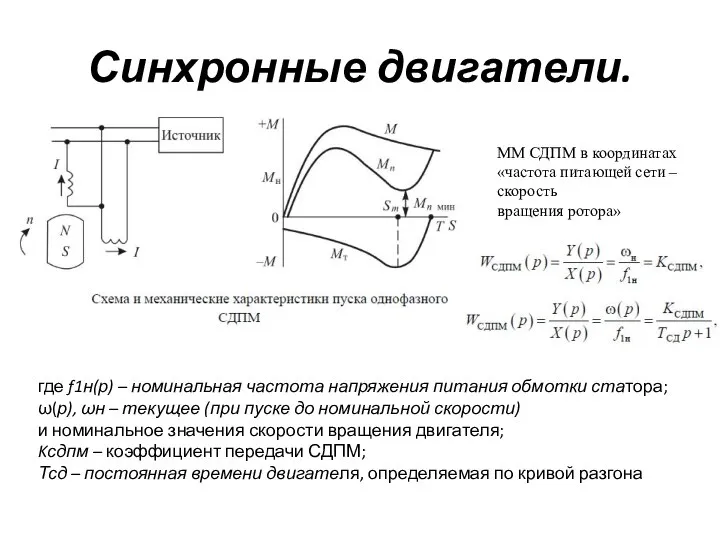
- 30. Синхронные двигатели. Различают следующие виды: – синхронные двигатели с электромагнитным возбуждением (СД), питающиеся от трехфазной сети
- 31. Синхронные двигатели. где f1н(р) – номинальная частота напряжения питания обмотки статора; ω(р), ωн – текущее (при
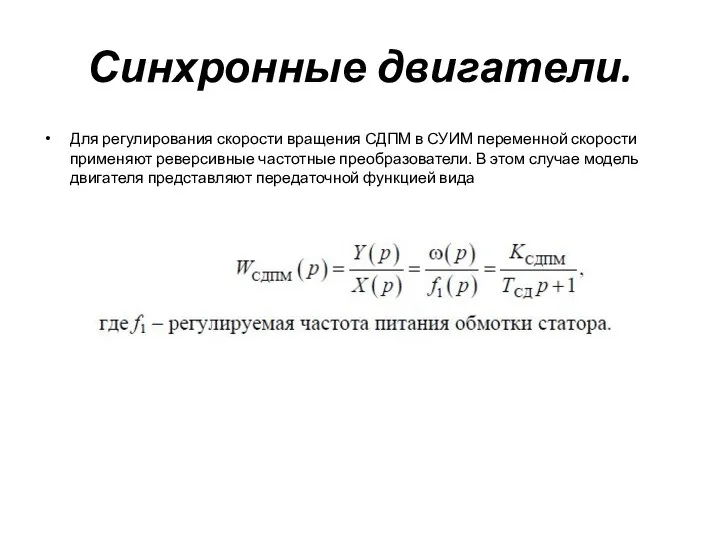
- 32. Синхронные двигатели. Для регулирования скорости вращения СДПМ в СУИМ переменной скорости применяют реверсивные частотные преобразователи. В
- 33. Шаговые двигатели. Шаговые двигатели (ШД) – это электромеханические устройства, преобразующие сигнал управления в угловое или линейное
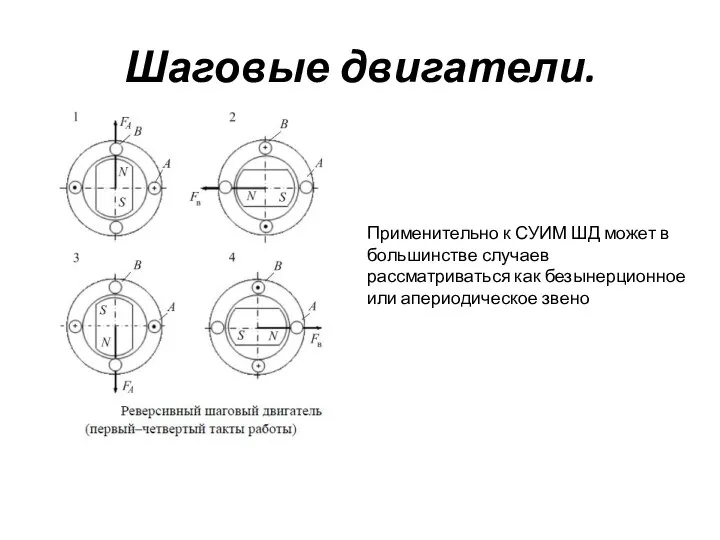
- 34. Шаговые двигатели. Применительно к СУИМ ШД может в большинстве случаев рассматриваться как безынерционное или апериодическое звено
- 35. Силовые преобразователи энергии служат для преобразования электрической энергии промышленной питающей сети в электрическую энергию с параметрами,
- 36. Тиристорные преобразователи Статическая модель. Статическая характеристика представляет собой регулировочную характеристику еп = f(Uу).
- 37. Динамическая модель. Для целей синтеза САУ на практике применяют три модели:
- 38. Транзисторные и симисторные преобразователи
- 39. Датчики координат СУИМ обычно представляются в виде безынерционных звеньев, входом которых являются измеряемые координаты, а выходами
- 41. Регуляторы и корректирующие звенья Независимо от технологического назначения регуляторов (регуляторов скорости, положения рабочего органа, давления, уровня,
- 42. Функциональные схемы регуляторов СУИМ
- 43. Функциональная схема аналогового регулятора класса «вход-выход» Обозначения на схеме: A1 – операционный усилитель (усилительное звено); Zвх,
- 44. При математическом описании регуляторов применим следующую последовательность: 1. принципиальная схема регулятора; 2. передаточная функция 3. переходная
- 45. Пропорциональный регулятор (П-регулятор) A1 – операционный усилитель; Rз, R0, Rос – значения активного сопротивления соответственно в
- 46. Интегральный регулятор (И-регулятор) принципиальная схема И регулятора Передаточная функция Переходная характеристика . Переходный процесс функциональная схема
- 47. Дифференциальный регулятор (Д-регулятор) принципиальная схема Д-регулятора Передаточная функция Переходная характеристика . Переходный процесс функциональная схема
- 48. Пропорционально-интегральный регулятор (ПИ-регулятор) принципиальная схема ПИ-регулятора Передаточная функция Переходная характеристика . Переходный процесс функциональная схема Или
- 49. Пропорционально-дифференциальный регулятор (ПД-регулятор) принципиальная схема ПИД-регулятора Передаточная функция Переходная характеристика .Переходный процесс функциональная схема
- 50. Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор) принципиальная схема ПИД-регулятора Передаточная функция Переходная характеристика Переходный процесс функциональная схема Или в
- 51. Регуляторы включают, как правило, последовательно с объектом управления. Они призваны скорректировать динамику СУИМ с целью удовлетворения
- 52. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СУИМ базируются на контроле текущего состояния объекта управления и применении обратных связей по
- 53. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СУИМ В зависимости от требований к статическим и динамическим показателям управления применяют различные
- 54. СУИМ постоянной скорости релейно-контакторные системы управления (РКСУ) СУИМ постоянной скорости с бесконтактными (полупроводниковыми) реверсорами.
- 55. Релейно-контакторные СУИМ (РКСУ) Релейно-контакторные системы управления (РКСУ) реализуются по принципу разомкнутого управления и применяются для управления
- 56. Типовые узлы электрических схем РКСУ, осуществляющих пуск, торможение и реверсирование электродвигателя
- 57. Узлы пуска и торможения электродвигателей, работающие по принципу времени Управление в функции времени предполагает, что в
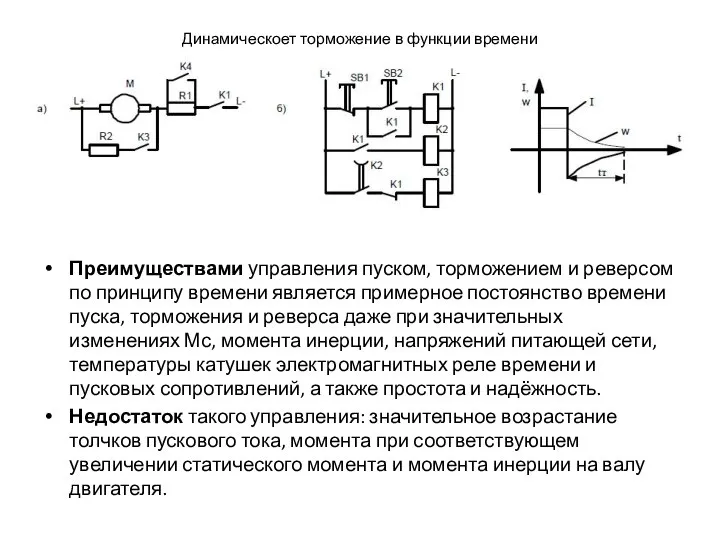
- 58. Динамическоет торможение в функции времени Преимуществами управления пуском, торможением и реверсом по принципу времени является примерное
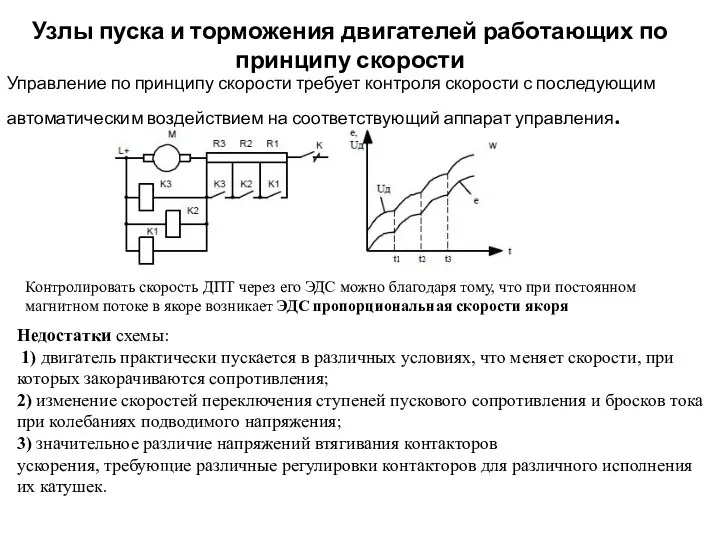
- 59. Узлы пуска и торможения двигателей работающих по принципу скорости Управление по принципу скорости требует контроля скорости
- 60. Схема торможения двигателя в функции скорости В исходном положении ни один аппарат не срабатывает. При нажатии
- 61. Достоинства узлов схем работающих по принципу скорости: простота и дешевизна. Недостатки: зависимость времени пуска и торможения
- 62. Узлы пуска и торможения электродвигателей, работающих по принципу тока Управление в функции тока реализуется применением реле
- 63. Узлы пуска и торможения электродвигателей по принципу пути узел электрической схемы управления электродвигателями работает в зависимости
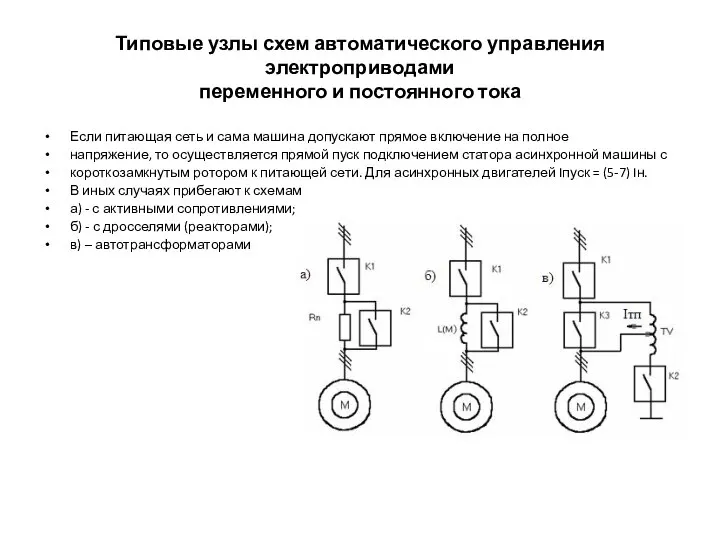
- 64. Типовые узлы схем автоматического управления электроприводами переменного и постоянного тока Если питающая сеть и сама машина
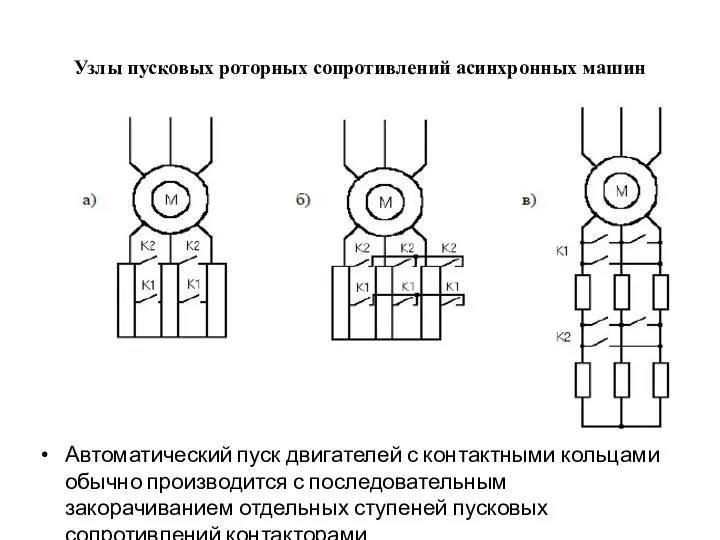
- 65. Узлы пусковых роторных сопротивлений асинхронных машин Автоматический пуск двигателей с контактными кольцами обычно производится с последовательным
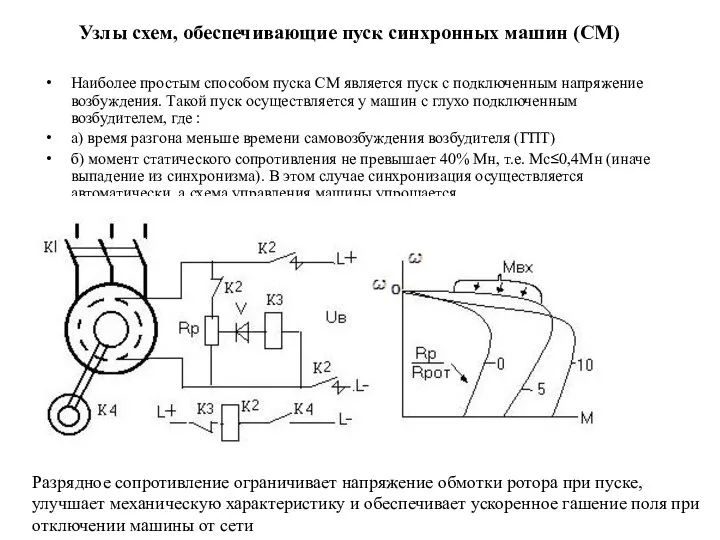
- 66. Узлы схем, обеспечивающие пуск синхронных машин (СМ) Наиболее простым способом пуска СМ является пуск с подключенным
- 67. Узлы схем главных цепей машин пост тока
- 68. Схемы управления ДПТ большой мощности
- 69. Узлы защиты ИМ Применяются следующие виды защит: 1. нулевая; 2. максимально и минимально токовая; 3. тепловая;
- 70. Нулевая защита обеспечивает защиту от самозапуска двигателей при чрезмерном снижении или кратковременном исчезновении напряжения питающей сети.
- 71. Тепловая защита обеспечивает защиту двигателей от перегрузки. Она осуществляется электротепловыми, максимально-токовыми реле и автоматическими выключателями с
- 72. Минимально токовая защита используется в двигателях ДПТ и СД для защиты от обрыва цепи ОВ. Осуществляется
- 73. Специальные защиты присущи отдельным двигателям или установкам в целом , к ним относятся : 1. Защиты
- 74. Блокировки и сигнализации Блокировки в электрических схемах обеспечивают правильный порядок работы схем, исключают ложные срабатывания и
- 75. Технологические блокировки используются для осуществления заданной последовательности работы схемы К защитным блокировкам относят: 1. Путевые. 2.Блокировки
- 76. Сигнализации: 1. Контрольная – для контроля наличия того или иного сигнала, или напряжения питания и истинного
- 77. Принципиальная электрическая схема станции ПУ-5522 управления короткозамкнутым АД
- 78. РКСУ асинхронным двигателем с фазным ротором
- 79. Бесконтактные СУИМ постоянной скорости По принципу управления такие СУИМ подразделяются на следующие типы: – ручного управления
- 80. Обобщенная функциональная схема СУИМ постоянной скорости Обозначения на схеме: ИУ – измерительное устройство; ФЭ – формирующий
- 81. Функции и реализации алгоритмов ФЭ Релейно-импульсное управление (двух- и трехпозиционное) формируется релейными регуляторами с широтно-импульсной (ШИМ)
- 82. Системы стабилизации технологических координат Требования к системам стабилизации формулируются в отношении выходной координаты в статике и
- 83. Статическая ошибка в системе стабилизации может быть сведена к нулю за счет – включения интегральной составляющей
- 84. В динамике , т.е. в режимах отработки системой изменений задающих и возмущающих воздействий внешней среды, к
- 85. Форсирование управляющего воздействия Кривая 1 – реакция тока возбуждения на ступенчатое задающее воздействие без форсировки управляющего
- 86. Компенсация больших постоянных времени объекта управления. Выполняется после структурно-параметрической декомпозиции объекта управления . некомпенсированная малая постоянная
- 87. Системы программного управления, ограничение координат СУИМ основные требования к программным системам управления а) максимум быстродействия при
- 88. В электромеханических СУИМ требуется ограничивать, следующие координаты – скорость электродвигателя (ω ≤ ωmax); – ток якоря
- 89. Функциональная схема САР скорости с “отсечкой” по току якоря Нелинейная обратная связь по току якоря вступает
- 90. Ограничение координат СУИМ с помощью задатчиков интенсивности. Задатчики интенсивности (ЗИ) служат, прежде всего, для ограничения фазовых
- 91. ЗИ, обеспечивающие постоянство времени регулирования при ступенчатых изменениях задающего воздействия время отработки произвольного по величине скачка
- 92. Задатчик интенсивности 2-го порядка в отличие от рассмотренных ЗИ содержит интегратор 2-го порядка, что позволяет ограничить
- 93. Системы следящего управления, функционируют исключительно в режимах малых отклонений координат, т.е. ни одна координата СУИМ (объекта
- 94. Понятие добротности Для оценки точности отработки задающих воздействий с постоянной скоростью и ускорением вводятся понятия добротности
- 95. Синтез СУИМ переменной скорости СУИМ переменной скорости требуют, как правило, регулирования не только самой скорости электродвигателя,
- 96. Подчиненное регулирование координат
- 97. Основные положения принципа подчиненного регулирования
- 98. Оптимальные настройки контуров регулирования В многоконтурных электромеханических системах подчиненного регулирования координат наиболее распространены настройки отдельных контуров
- 99. Технический оптимум
- 100. Симметричный оптимум
- 101. Апериодический оптимум
- 103. Скачать презентацию
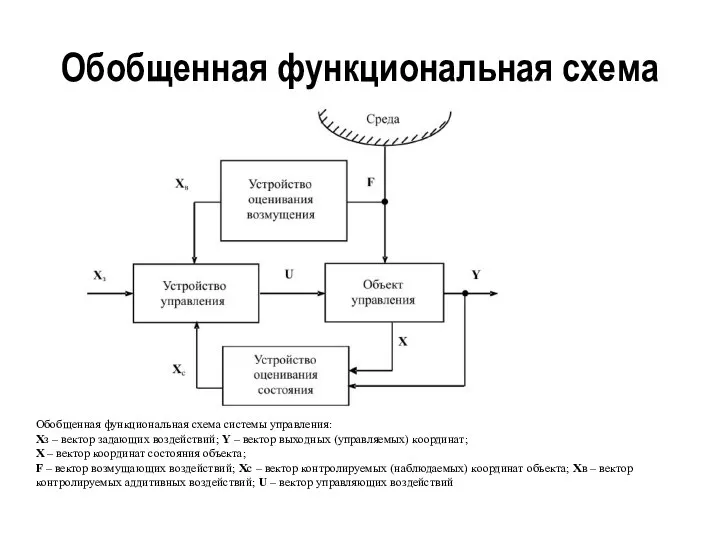
Обобщенная функциональная схема
Обобщенная функциональная схема системы управления:
Xз – вектор задающих воздействий;
Обобщенная функциональная схема
Обобщенная функциональная схема системы управления:
Xз – вектор задающих воздействий;

Обобщенная функциональная схема локальной
электромеханической системы управления
УЗ – устройство задания
СПЭ – силовые
Обобщенная функциональная схема локальной
электромеханической системы управления
УЗ – устройство задания
СПЭ – силовые

Статические и динамические режимы и характеристики
Статические режимы СУИМ характеризуются установившимися состояниями
Статические и динамические режимы и характеристики
Статические режимы СУИМ характеризуются установившимися состояниями


Синтез и анализ СУИМ
К основным задачам синтеза СУИМ (функциям НИР)
Синтез и анализ СУИМ
К основным задачам синтеза СУИМ (функциям НИР)
Математическое описание ОУ
– определение структуры и параметров ОУ, наиболее существенно
Математическое описание ОУ
– определение структуры и параметров ОУ, наиболее существенно

Формулирование критерия качества управления
целевая функция, цель управления, функционал качества,
Формулирование критерия качества управления
целевая функция, цель управления, функционал качества,
Синтез СУИМ
Нахождение ее структуры и параметров, обеспечивающих заданное качество управления
Синтез СУИМ
Нахождение ее структуры и параметров, обеспечивающих заданное качество управления

Анализ синтезированной СУИМ
Результат анализа должен дать ответ на вопрос, соответствует ли
Анализ синтезированной СУИМ
Результат анализа должен дать ответ на вопрос, соответствует ли

Задача анализа СУИМ предполагает в общем случае решение
нескольких подзадач:
– определение
Задача анализа СУИМ предполагает в общем случае решение
нескольких подзадач:
– определение
при анализе СУИМ используется
– математическое моделирование (цифровое, аналоговое, цифроаналоговое);
– полунатурное моделирование
при анализе СУИМ используется
– математическое моделирование (цифровое, аналоговое, цифроаналоговое);
– полунатурное моделирование
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
ФУНКЦИОНАЛЬНЫХ ЭЛЕМЕНТОВ СУИМ
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
ФУНКЦИОНАЛЬНЫХ ЭЛЕМЕНТОВ СУИМ
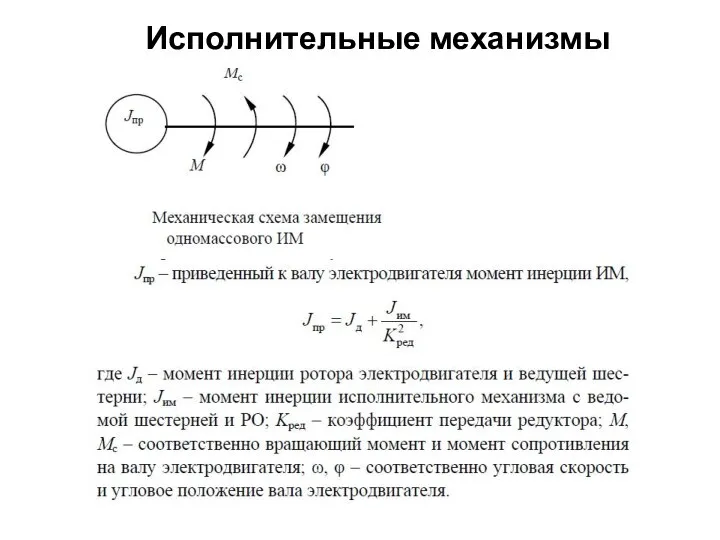
Исполнительные механизмы
Исполнительные механизмы

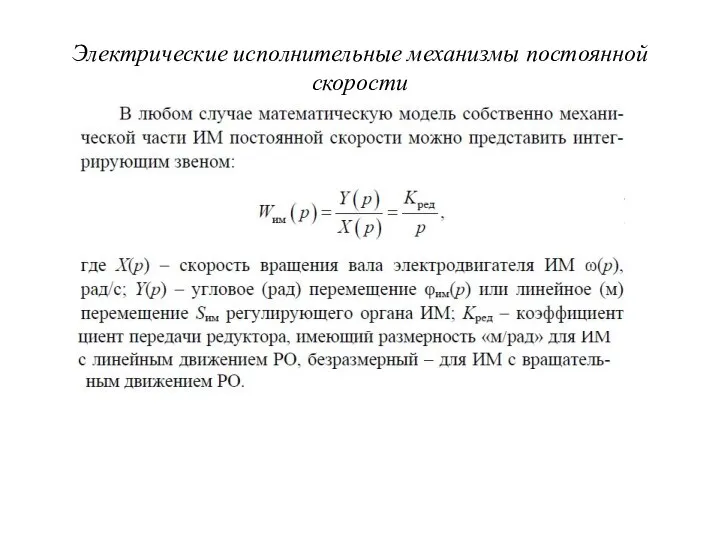
Электрические исполнительные механизмы постоянной скорости
Электрические исполнительные механизмы постоянной скорости

Приводы
К приводам ЭИМ относятся следующие типы двигателей:
– коллекторные двигатели постоянного тока
Приводы
К приводам ЭИМ относятся следующие типы двигателей:
– коллекторные двигатели постоянного тока
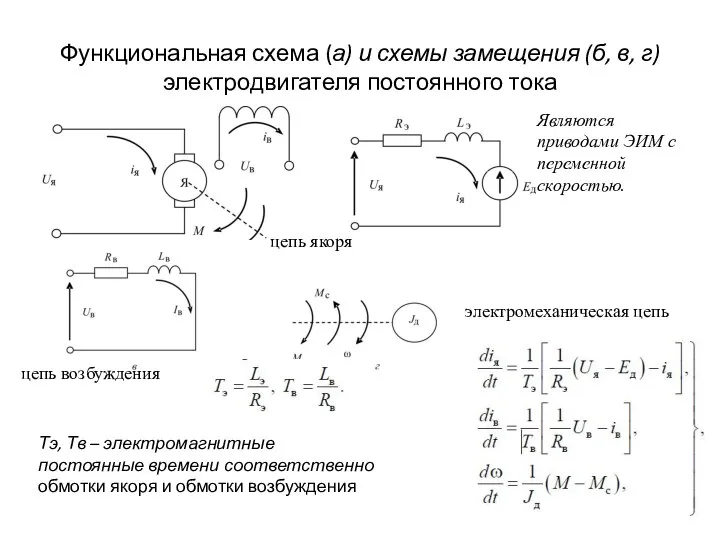
Функциональная схема (а) и схемы замещения (б, в, г)
электродвигателя постоянного тока
Тэ,
Функциональная схема (а) и схемы замещения (б, в, г)
электродвигателя постоянного тока
Тэ,


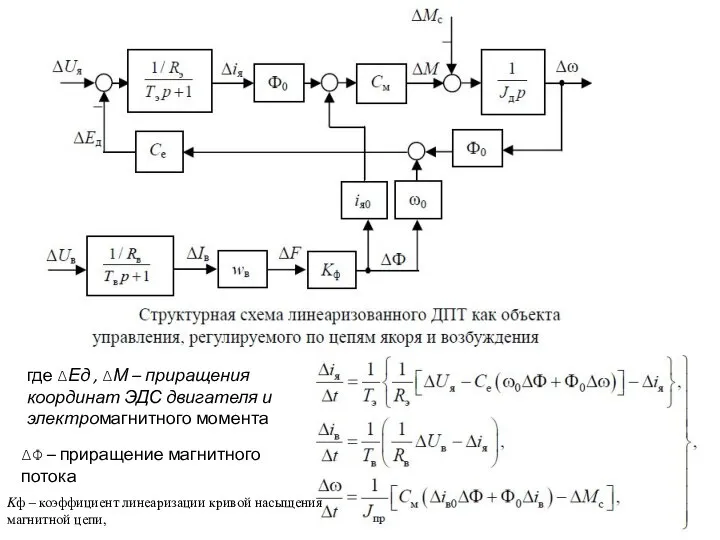
где ΔЕд , ΔМ – приращения координат ЭДС двигателя и электромагнитного
где ΔЕд , ΔМ – приращения координат ЭДС двигателя и электромагнитного

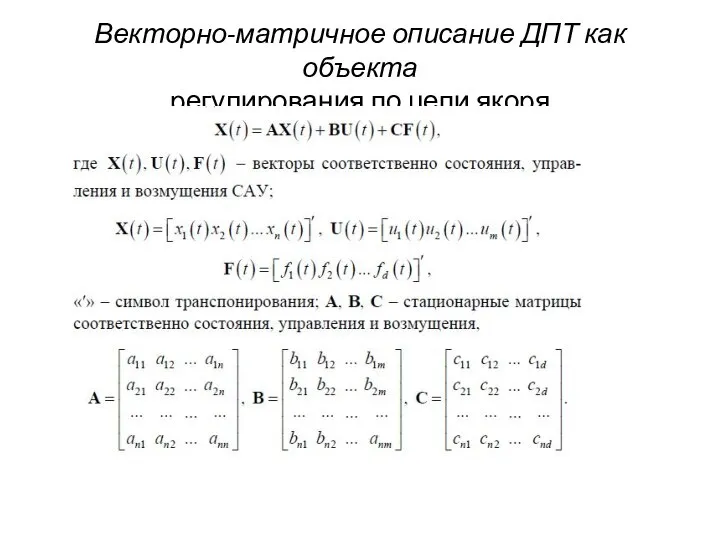
Векторно-матричное описание ДПТ как объекта
регулирования по цепи якоря
Векторно-матричное описание ДПТ как объекта
регулирования по цепи якоря

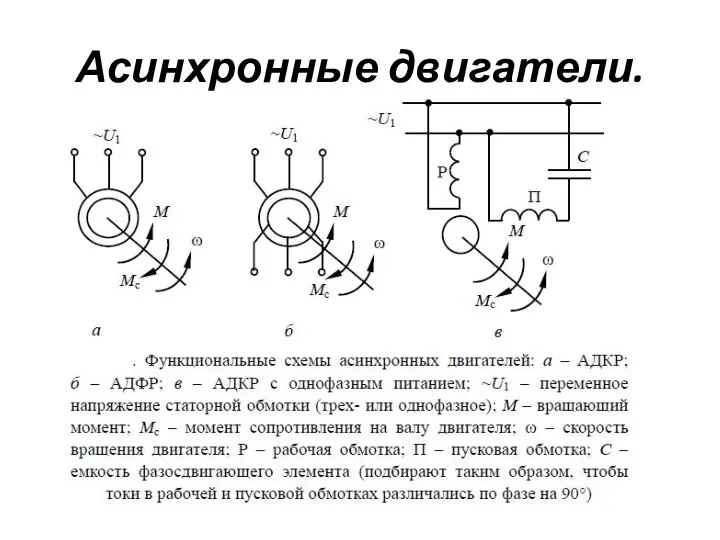
Асинхронные двигатели.
Асинхронные двигатели.
При использовании таких
двигателей в ЭИМ постоянной
скорости
реализуют непосредственное подключение статорной обмотки к
При использовании таких
двигателей в ЭИМ постоянной
скорости
реализуют непосредственное подключение статорной обмотки к
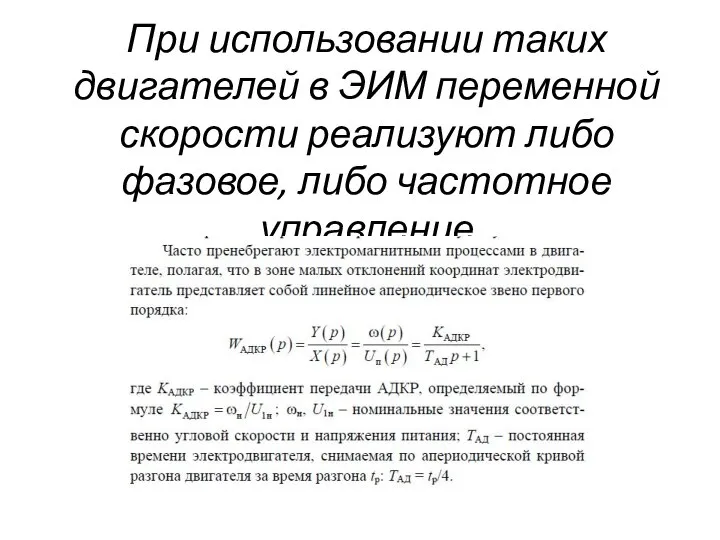
При использовании таких двигателей в ЭИМ переменной скорости реализуют либо фазовое,
При использовании таких двигателей в ЭИМ переменной скорости реализуют либо фазовое,
Если нельзя пренебречь влиянием электромагнитных процессов на динамику электродвигателя
модель электродвигателя как
Если нельзя пренебречь влиянием электромагнитных процессов на динамику электродвигателя
модель электродвигателя как
Синхронные двигатели.
Различают следующие виды:
– синхронные двигатели с электромагнитным возбуждением (СД),
Синхронные двигатели.
Различают следующие виды:
– синхронные двигатели с электромагнитным возбуждением (СД),
Синхронные двигатели.
где f1н(р) – номинальная частота напряжения питания обмотки статора;
ω(р),
Синхронные двигатели.
где f1н(р) – номинальная частота напряжения питания обмотки статора;
ω(р),
Синхронные двигатели.
Для регулирования скорости вращения СДПМ в СУИМ переменной скорости применяют
Синхронные двигатели.
Для регулирования скорости вращения СДПМ в СУИМ переменной скорости применяют
Шаговые двигатели.
Шаговые двигатели (ШД) – это электромеханические устройства, преобразующие сигнал управления
Шаговые двигатели.
Шаговые двигатели (ШД) – это электромеханические устройства, преобразующие сигнал управления
Шаговые двигатели.
Применительно к СУИМ ШД может в большинстве случаев
рассматриваться как безынерционное
Шаговые двигатели.
Применительно к СУИМ ШД может в большинстве случаев
рассматриваться как безынерционное
Силовые преобразователи энергии
служат для преобразования электрической энергии промышленной питающей сети в
Силовые преобразователи энергии
служат для преобразования электрической энергии промышленной питающей сети в
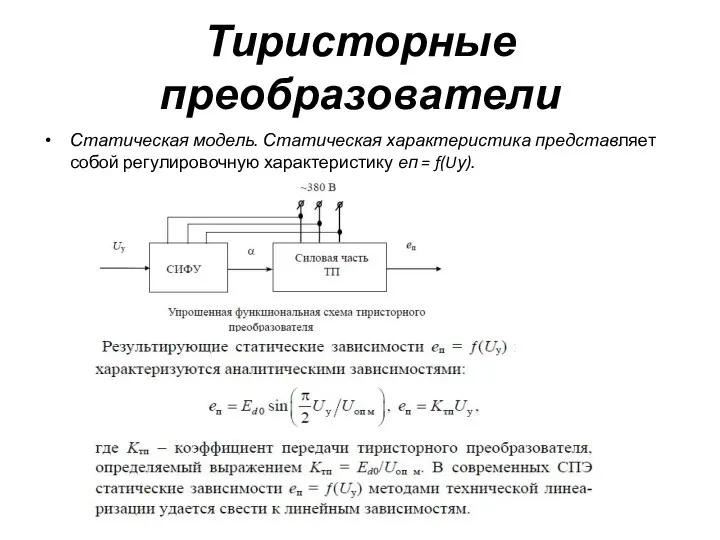
Тиристорные преобразователи
Статическая модель. Статическая характеристика представляет собой регулировочную характеристику еп =
Тиристорные преобразователи
Статическая модель. Статическая характеристика представляет собой регулировочную характеристику еп =
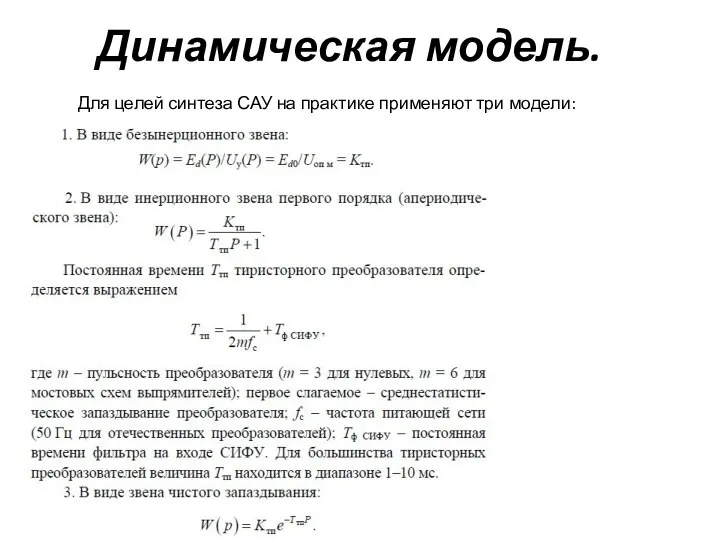
Динамическая модель.
Для целей синтеза САУ на практике применяют три модели:
Динамическая модель.
Для целей синтеза САУ на практике применяют три модели:
Транзисторные и симисторные преобразователи
Транзисторные и симисторные преобразователи
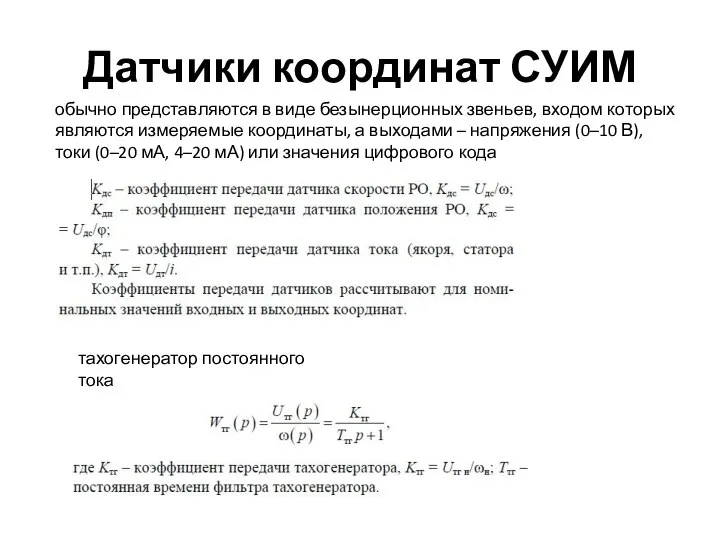
Датчики координат СУИМ
обычно представляются в виде безынерционных звеньев, входом которых являются
Датчики координат СУИМ
обычно представляются в виде безынерционных звеньев, входом которых являются

Регуляторы и корректирующие звенья
Независимо от технологического назначения регуляторов (регуляторов скорости, положения
Регуляторы и корректирующие звенья
Независимо от технологического назначения регуляторов (регуляторов скорости, положения
Функциональные схемы регуляторов СУИМ
Функциональные схемы регуляторов СУИМ
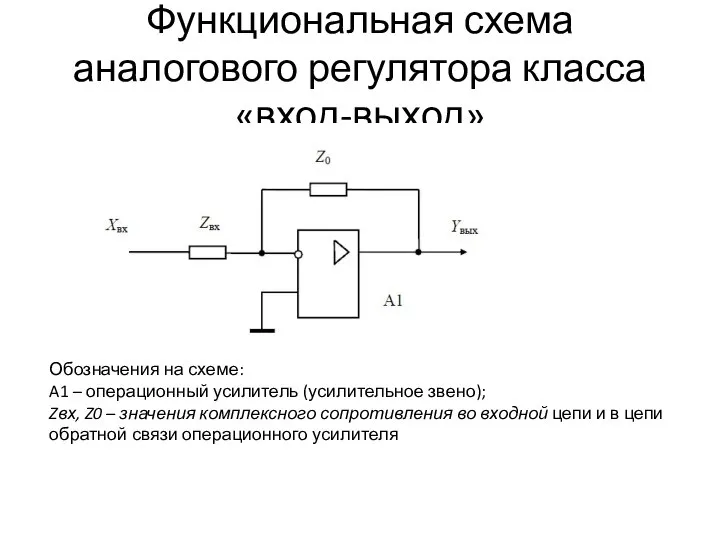
Функциональная схема аналогового регулятора класса «вход-выход»
Обозначения на схеме:
A1 – операционный усилитель
Функциональная схема аналогового регулятора класса «вход-выход»
Обозначения на схеме:
A1 – операционный усилитель
При математическом описании регуляторов применим следующую последовательность:
1. принципиальная схема регулятора;
2. передаточная
При математическом описании регуляторов применим следующую последовательность:
1. принципиальная схема регулятора;
2. передаточная
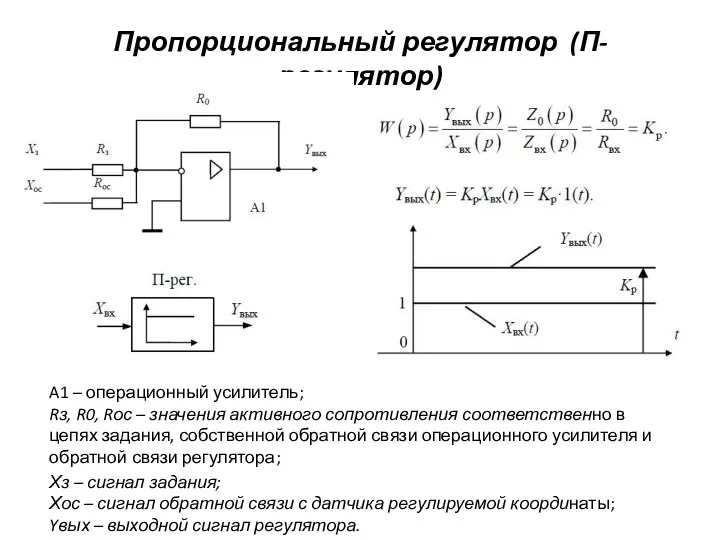
Пропорциональный регулятор (П-регулятор)
A1 – операционный усилитель;
Rз, R0, Rос – значения активного
Пропорциональный регулятор (П-регулятор)
A1 – операционный усилитель;
Rз, R0, Rос – значения активного
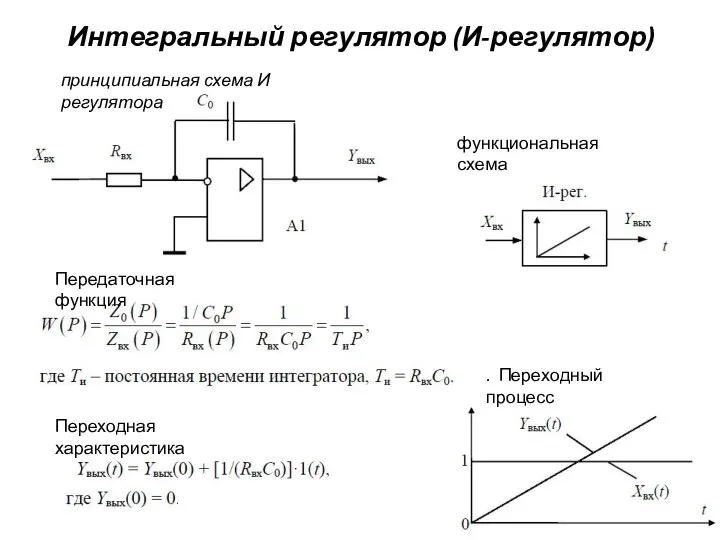
Интегральный регулятор (И-регулятор)
принципиальная схема И регулятора
Передаточная функция
Переходная характеристика
. Переходный процесс
функциональная
Интегральный регулятор (И-регулятор)
принципиальная схема И регулятора
Передаточная функция
Переходная характеристика
. Переходный процесс
функциональная
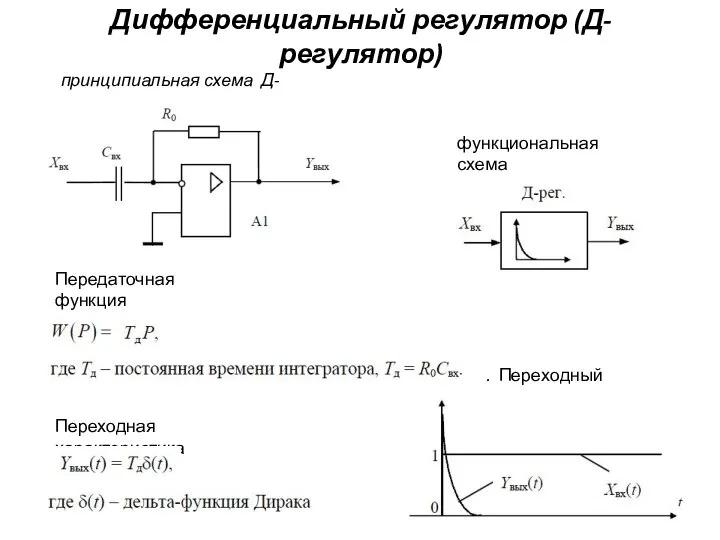
Дифференциальный регулятор (Д-регулятор)
принципиальная схема Д-регулятора
Передаточная функция
Переходная характеристика
. Переходный процесс
функциональная схема
Дифференциальный регулятор (Д-регулятор)
принципиальная схема Д-регулятора
Передаточная функция
Переходная характеристика
. Переходный процесс
функциональная схема
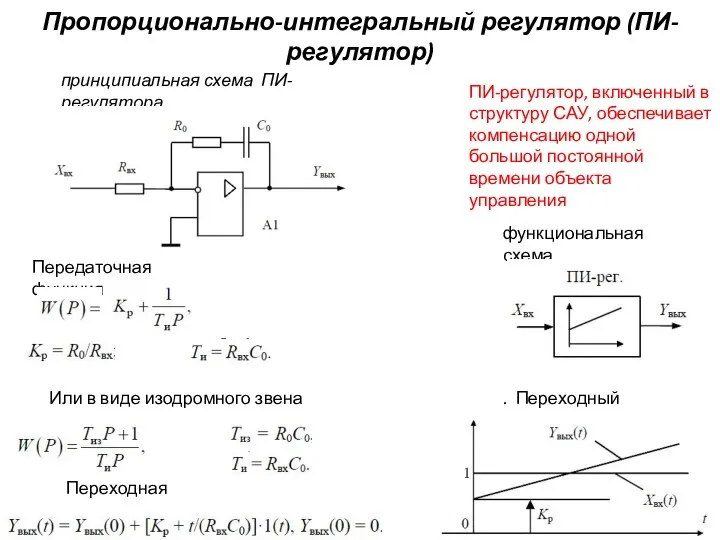
Пропорционально-интегральный регулятор (ПИ-регулятор)
принципиальная схема ПИ-регулятора
Передаточная функция
Переходная характеристика
. Переходный процесс
функциональная схема
Или
Пропорционально-интегральный регулятор (ПИ-регулятор)
принципиальная схема ПИ-регулятора
Передаточная функция
Переходная характеристика
. Переходный процесс
функциональная схема
Или
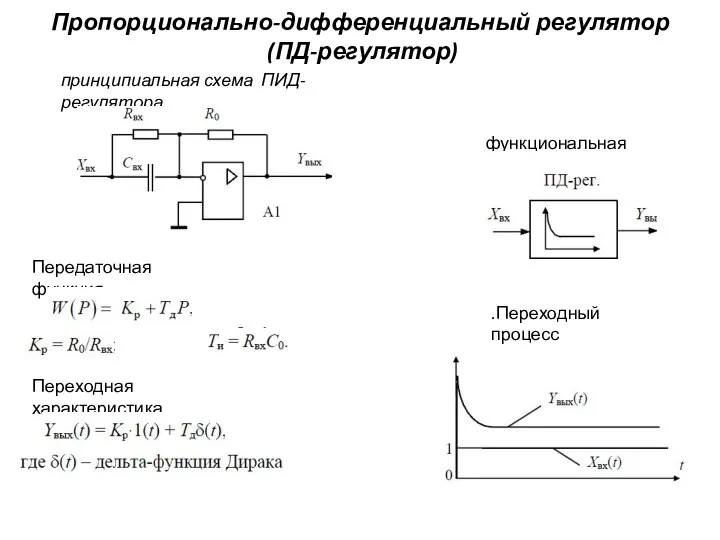
Пропорционально-дифференциальный регулятор
(ПД-регулятор)
принципиальная схема ПИД-регулятора
Передаточная функция
Переходная характеристика
.Переходный процесс
функциональная схема
Пропорционально-дифференциальный регулятор
(ПД-регулятор)
принципиальная схема ПИД-регулятора
Передаточная функция
Переходная характеристика
.Переходный процесс
функциональная схема
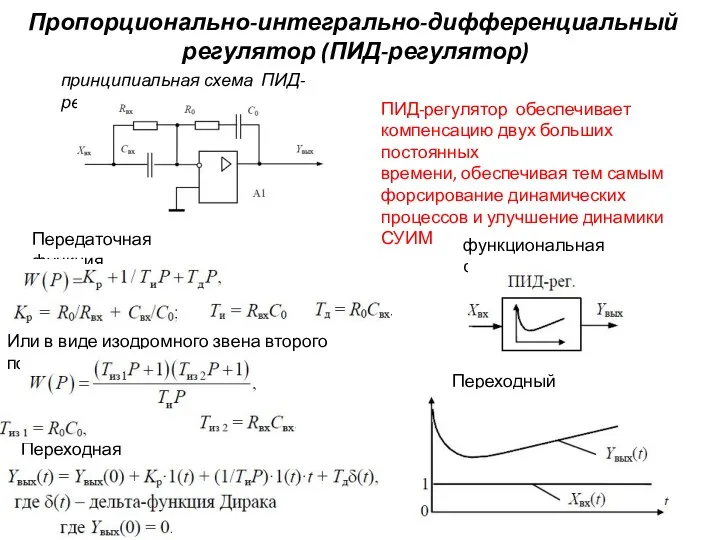
Пропорционально-интегрально-дифференциальный
регулятор (ПИД-регулятор)
принципиальная схема ПИД-регулятора
Передаточная функция
Переходная характеристика
Переходный процесс
функциональная схема
Или в
Пропорционально-интегрально-дифференциальный
регулятор (ПИД-регулятор)
принципиальная схема ПИД-регулятора
Передаточная функция
Переходная характеристика
Переходный процесс
функциональная схема
Или в

Регуляторы включают, как правило, последовательно с объектом управления. Они призваны скорректировать
Регуляторы включают, как правило, последовательно с объектом управления. Они призваны скорректировать
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СУИМ
базируются на контроле текущего состояния объекта управления и
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СУИМ
базируются на контроле текущего состояния объекта управления и

ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СУИМ
В зависимости от требований к статическим и динамическим
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СУИМ
В зависимости от требований к статическим и динамическим
СУИМ постоянной скорости
релейно-контакторные системы управления (РКСУ)
СУИМ постоянной скорости с
СУИМ постоянной скорости
релейно-контакторные системы управления (РКСУ)
СУИМ постоянной скорости с
Релейно-контакторные СУИМ (РКСУ)
Релейно-контакторные системы управления (РКСУ) реализуются по принципу разомкнутого управления
Релейно-контакторные СУИМ (РКСУ)
Релейно-контакторные системы управления (РКСУ) реализуются по принципу разомкнутого управления
Типовые узлы электрических схем РКСУ,
осуществляющих пуск,
торможение и реверсирование электродвигателя
Типовые узлы электрических схем РКСУ,
осуществляющих пуск,
торможение и реверсирование электродвигателя

Узлы пуска и торможения электродвигателей, работающие по принципу времени
Управление в функции
Узлы пуска и торможения электродвигателей, работающие по принципу времени
Управление в функции
Динамическоет торможение в функции времени
Преимуществами управления пуском, торможением и реверсом по
Динамическоет торможение в функции времени
Преимуществами управления пуском, торможением и реверсом по
Узлы пуска и торможения двигателей работающих по принципу скорости
Управление по принципу
Узлы пуска и торможения двигателей работающих по принципу скорости
Управление по принципу
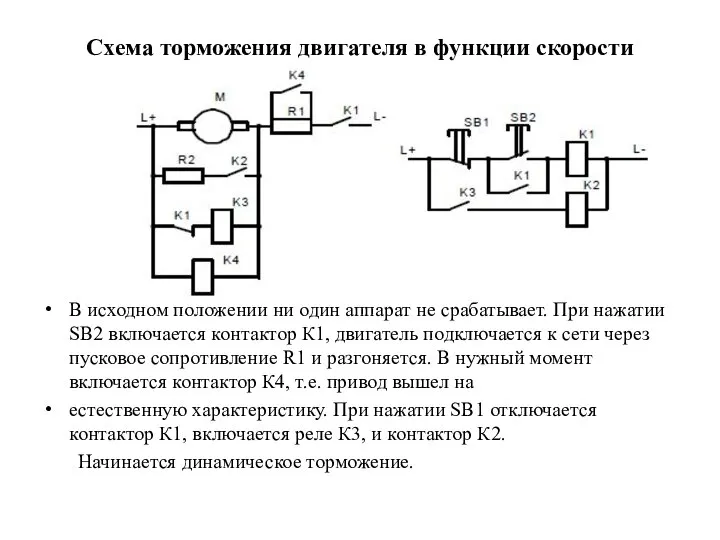
Схема торможения двигателя в функции скорости
В исходном положении ни один аппарат
Схема торможения двигателя в функции скорости
В исходном положении ни один аппарат
Достоинства узлов схем работающих по принципу скорости: простота и дешевизна.
Недостатки: зависимость
Достоинства узлов схем работающих по принципу скорости: простота и дешевизна.
Недостатки: зависимость
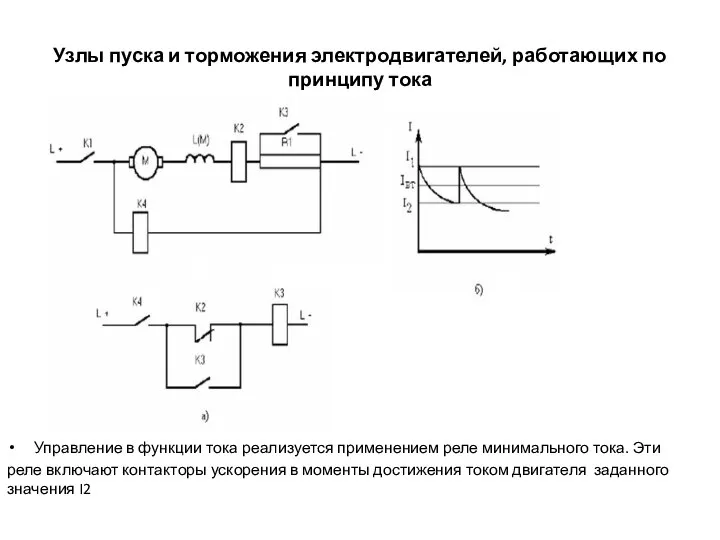
Узлы пуска и торможения электродвигателей, работающих по принципу тока
Управление в функции
Узлы пуска и торможения электродвигателей, работающих по принципу тока
Управление в функции

Узлы пуска и торможения электродвигателей по принципу пути
узел электрической схемы управления
Узлы пуска и торможения электродвигателей по принципу пути
узел электрической схемы управления
Типовые узлы схем автоматического управления электроприводами
переменного и постоянного тока
Если питающая сеть
Типовые узлы схем автоматического управления электроприводами
переменного и постоянного тока
Если питающая сеть
Узлы пусковых роторных сопротивлений асинхронных машин
Автоматический пуск двигателей с контактными кольцами
Узлы пусковых роторных сопротивлений асинхронных машин
Автоматический пуск двигателей с контактными кольцами
Узлы схем, обеспечивающие пуск синхронных машин (СМ)
Наиболее простым способом пуска СМ
Узлы схем, обеспечивающие пуск синхронных машин (СМ)
Наиболее простым способом пуска СМ
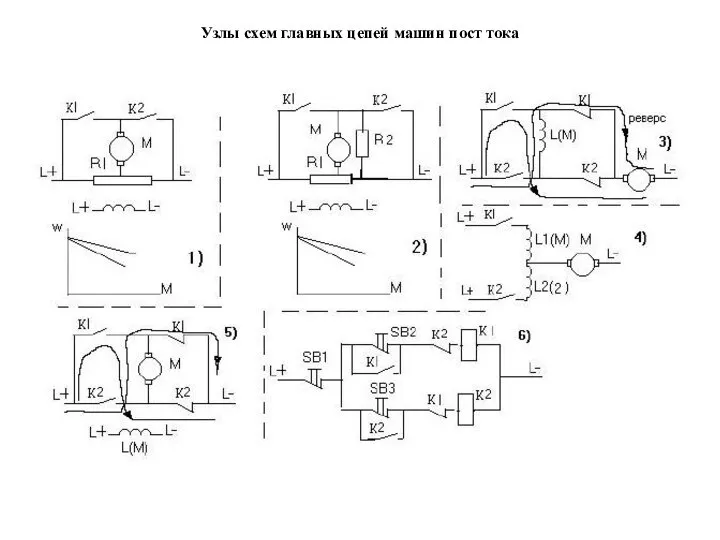
Узлы схем главных цепей машин пост тока
Узлы схем главных цепей машин пост тока
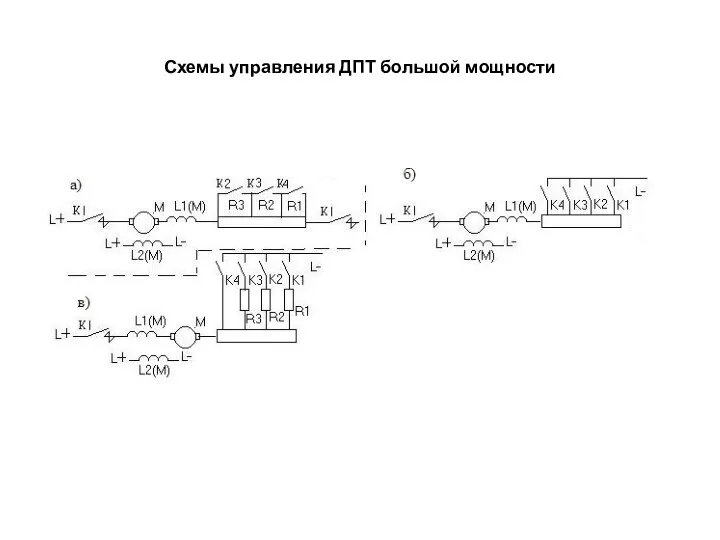
Схемы управления ДПТ большой мощности
Схемы управления ДПТ большой мощности
Узлы защиты ИМ
Применяются следующие виды защит:
1. нулевая;
2. максимально и минимально токовая;
3.
Узлы защиты ИМ
Применяются следующие виды защит:
1. нулевая;
2. максимально и минимально токовая;
3.
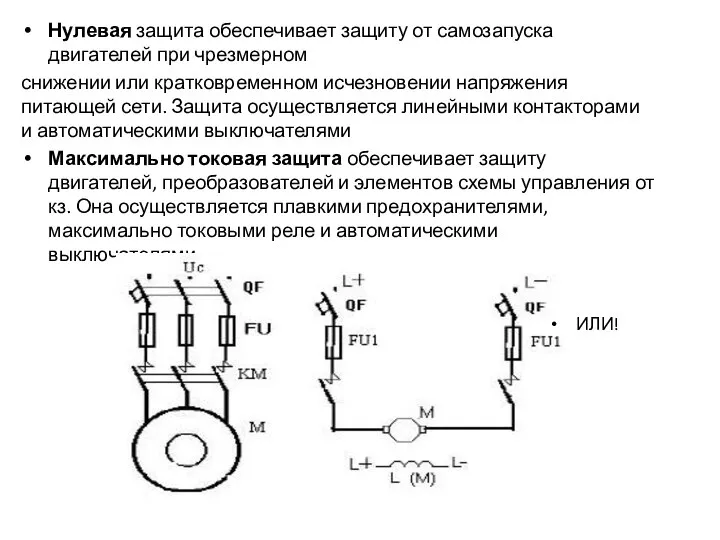
Нулевая защита обеспечивает защиту от самозапуска двигателей при чрезмерном
снижении или кратковременном
Нулевая защита обеспечивает защиту от самозапуска двигателей при чрезмерном
снижении или кратковременном
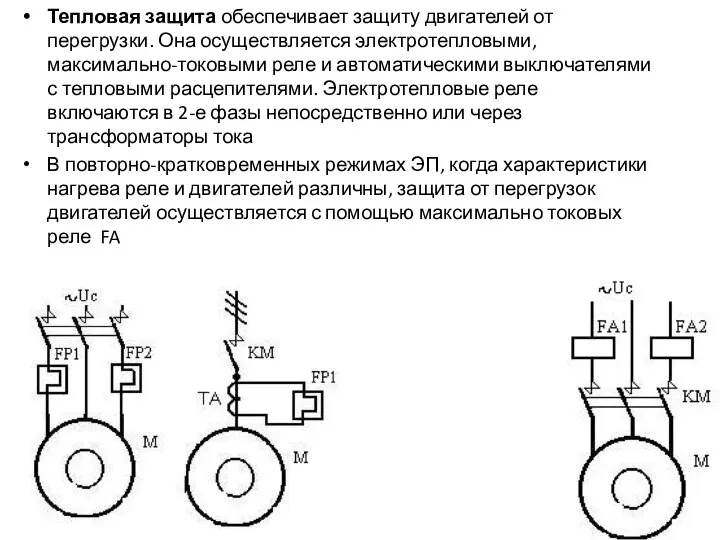
Тепловая защита обеспечивает защиту двигателей от перегрузки. Она осуществляется электротепловыми, максимально-токовыми
Тепловая защита обеспечивает защиту двигателей от перегрузки. Она осуществляется электротепловыми, максимально-токовыми
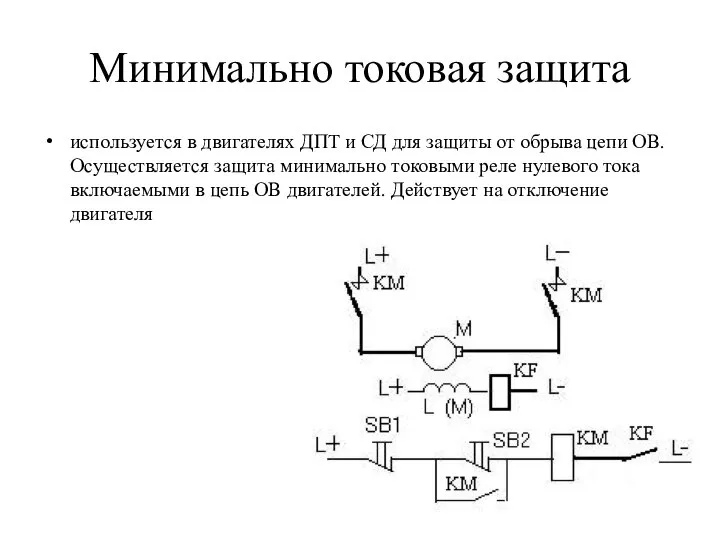
Минимально токовая защита
используется в двигателях ДПТ и СД для защиты
Минимально токовая защита
используется в двигателях ДПТ и СД для защиты
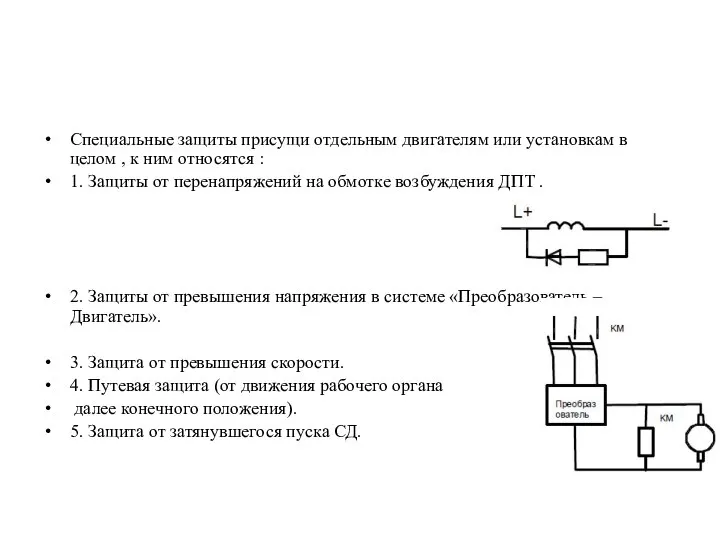
Специальные защиты присущи отдельным двигателям или установкам в целом , к
Специальные защиты присущи отдельным двигателям или установкам в целом , к
Блокировки и сигнализации
Блокировки в электрических схемах обеспечивают правильный порядок работы
Блокировки и сигнализации
Блокировки в электрических схемах обеспечивают правильный порядок работы

Технологические блокировки используются для осуществления заданной последовательности работы схемы
К защитным блокировкам
Технологические блокировки используются для осуществления заданной последовательности работы схемы
К защитным блокировкам
Сигнализации:
1. Контрольная – для контроля наличия того или иного сигнала, или
Сигнализации:
1. Контрольная – для контроля наличия того или иного сигнала, или

Принципиальная электрическая схема станции ПУ-5522
управления короткозамкнутым АД
Принципиальная электрическая схема станции ПУ-5522
управления короткозамкнутым АД
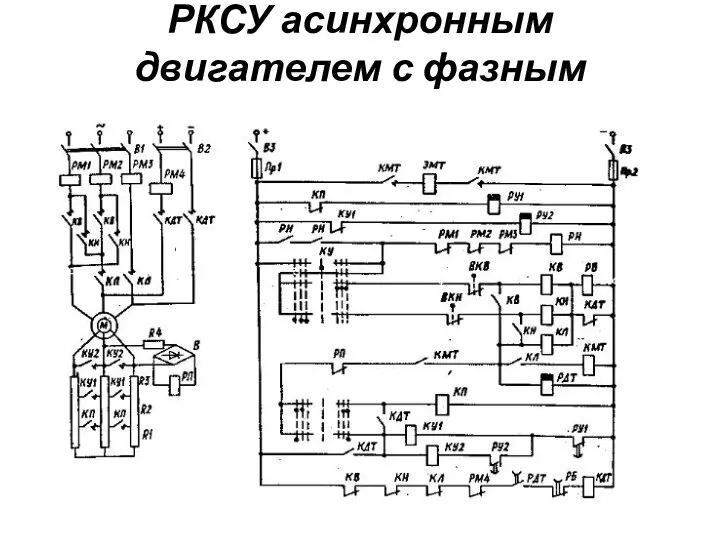
РКСУ асинхронным двигателем с фазным ротором
РКСУ асинхронным двигателем с фазным ротором

Бесконтактные СУИМ постоянной скорости
По принципу управления такие СУИМ подразделяются на следующие
Бесконтактные СУИМ постоянной скорости
По принципу управления такие СУИМ подразделяются на следующие
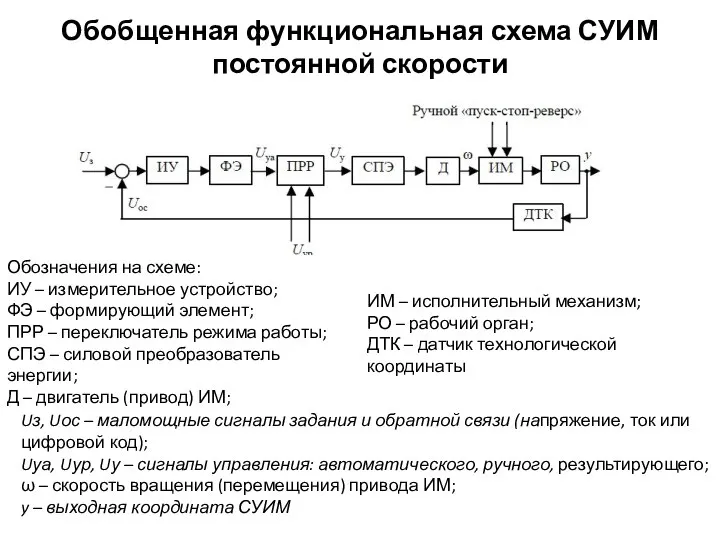
Обобщенная функциональная схема СУИМ постоянной скорости
Обозначения на схеме:
ИУ – измерительное устройство;
ФЭ
Обобщенная функциональная схема СУИМ постоянной скорости
Обозначения на схеме:
ИУ – измерительное устройство;
ФЭ
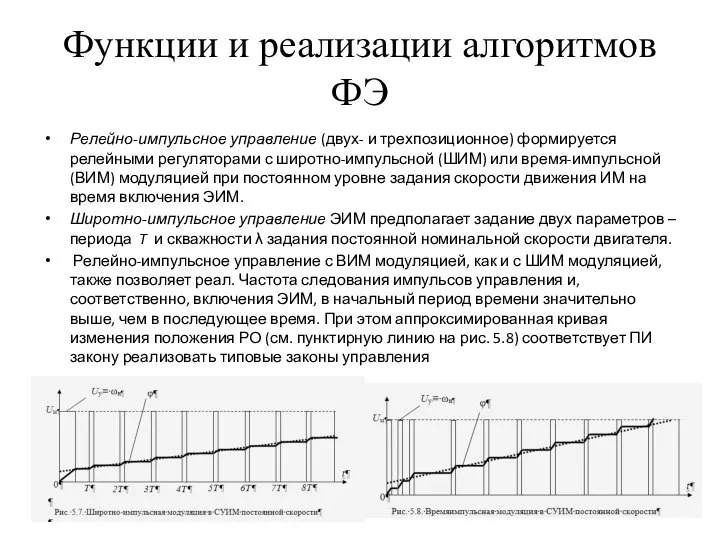
Функции и реализации алгоритмов ФЭ
Релейно-импульсное управление (двух- и трехпозиционное) формируется релейными
Функции и реализации алгоритмов ФЭ
Релейно-импульсное управление (двух- и трехпозиционное) формируется релейными
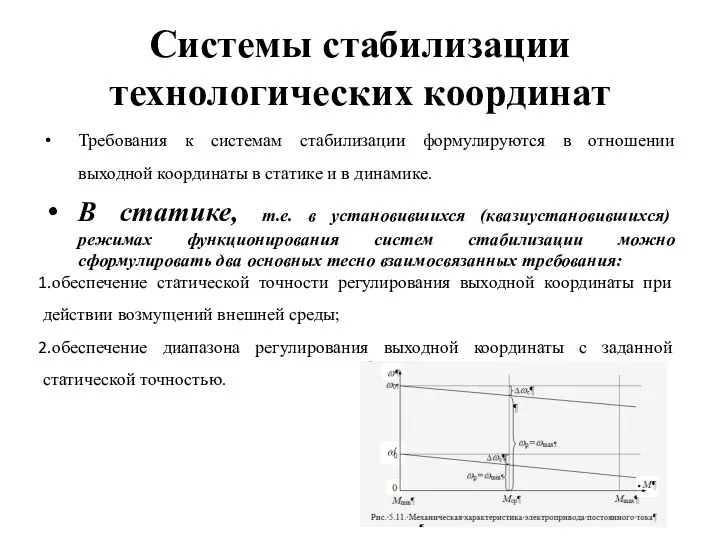
Системы стабилизации технологических координат
Требования к системам стабилизации формулируются в отношении выходной
Системы стабилизации технологических координат
Требования к системам стабилизации формулируются в отношении выходной
Статическая ошибка в системе стабилизации может быть сведена к нулю за
Статическая ошибка в системе стабилизации может быть сведена к нулю за
В динамике
, т.е. в режимах отработки системой изменений задающих и возмущающих
В динамике
, т.е. в режимах отработки системой изменений задающих и возмущающих
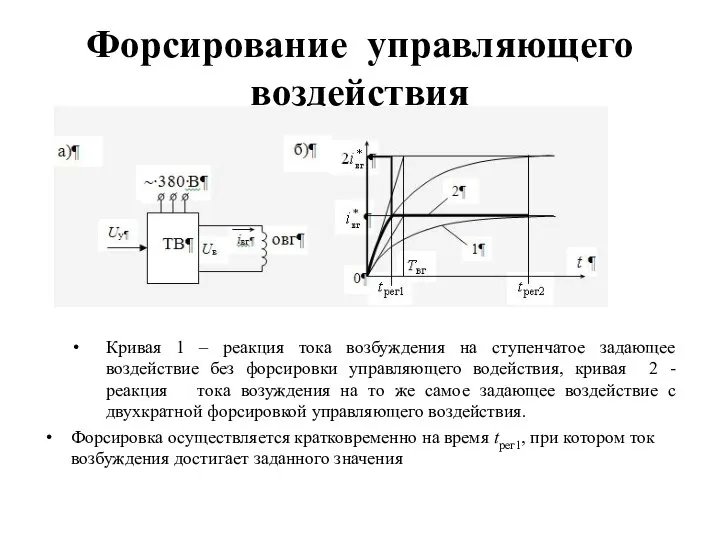
Форсирование управляющего воздействия
Кривая 1 – реакция тока возбуждения на ступенчатое задающее
Форсирование управляющего воздействия
Кривая 1 – реакция тока возбуждения на ступенчатое задающее
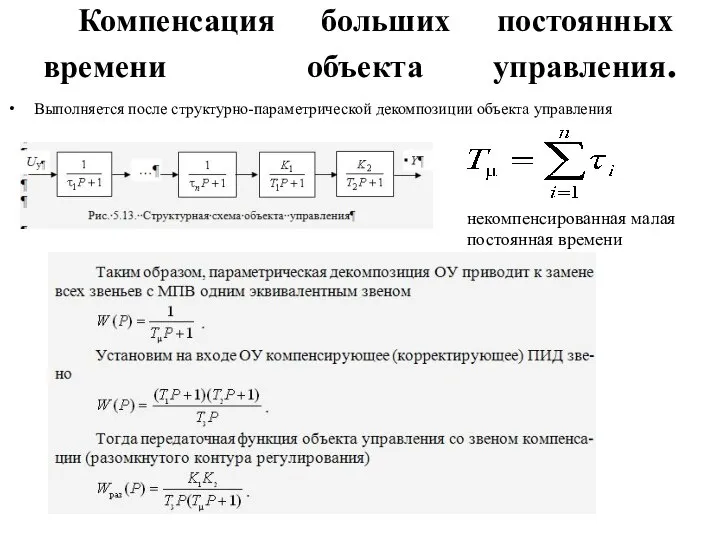
Компенсация больших постоянных времени объекта управления.
Выполняется после структурно-параметрической декомпозиции объекта управления
.
Компенсация больших постоянных времени объекта управления.
Выполняется после структурно-параметрической декомпозиции объекта управления
.
Системы программного управления, ограничение координат СУИМ
основные требования к программным системам управления
а)
Системы программного управления, ограничение координат СУИМ
основные требования к программным системам управления
а)
В электромеханических СУИМ требуется ограничивать, следующие координаты
– скорость электродвигателя (ω ≤
В электромеханических СУИМ требуется ограничивать, следующие координаты
– скорость электродвигателя (ω ≤
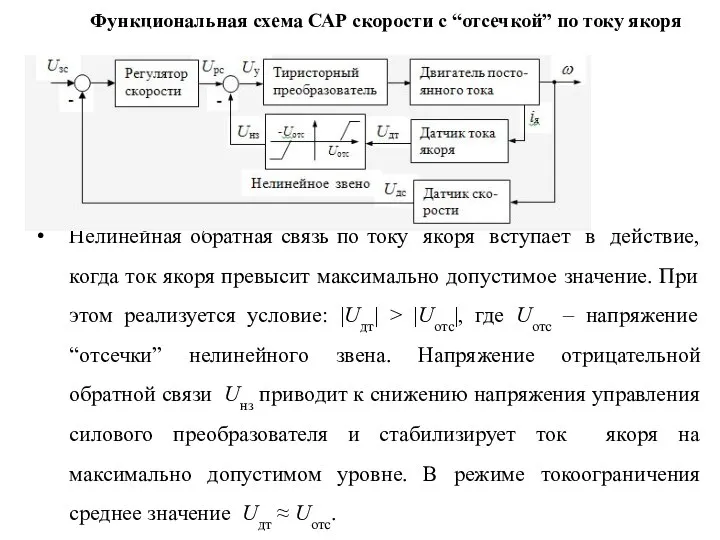
Функциональная схема САР скорости с “отсечкой” по току якоря
Нелинейная обратная связь
Функциональная схема САР скорости с “отсечкой” по току якоря
Нелинейная обратная связь
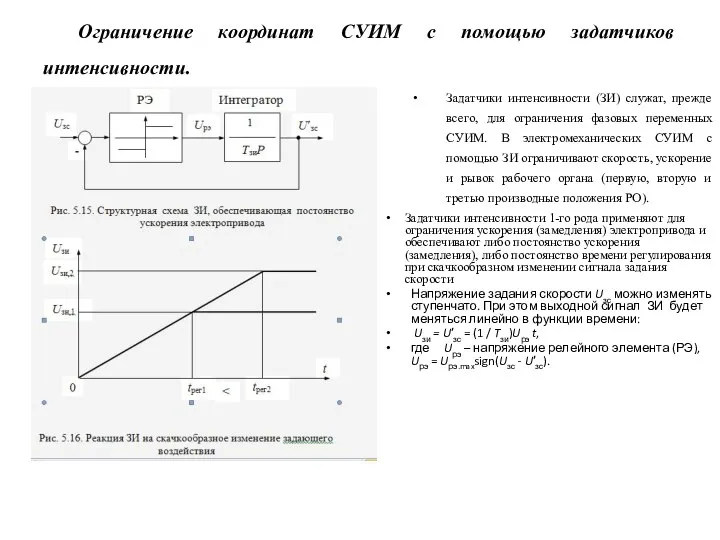
Ограничение координат СУИМ с помощью задатчиков интенсивности.
Задатчики интенсивности (ЗИ) служат, прежде
Ограничение координат СУИМ с помощью задатчиков интенсивности.
Задатчики интенсивности (ЗИ) служат, прежде
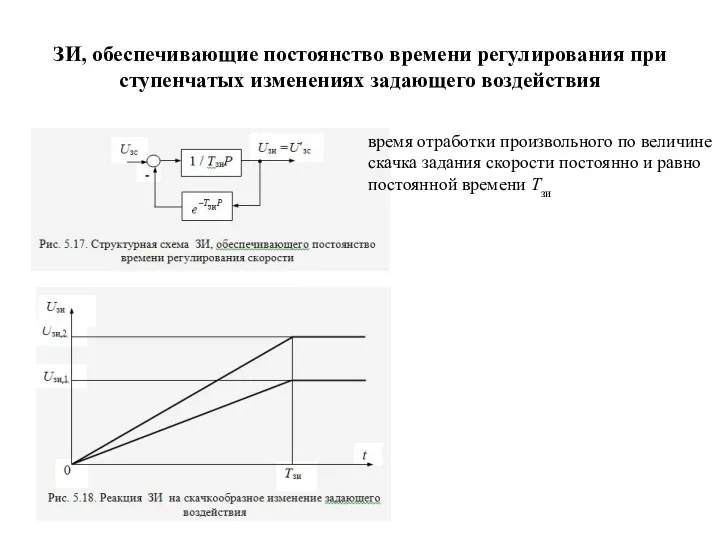
ЗИ, обеспечивающие постоянство времени регулирования при ступенчатых изменениях задающего воздействия
время отработки
ЗИ, обеспечивающие постоянство времени регулирования при ступенчатых изменениях задающего воздействия
время отработки
Задатчик интенсивности 2-го порядка
в отличие от рассмотренных ЗИ содержит интегратор
Задатчик интенсивности 2-го порядка
в отличие от рассмотренных ЗИ содержит интегратор
Системы следящего управления,
функционируют исключительно в режимах малых отклонений координат, т.е.
Системы следящего управления,
функционируют исключительно в режимах малых отклонений координат, т.е.
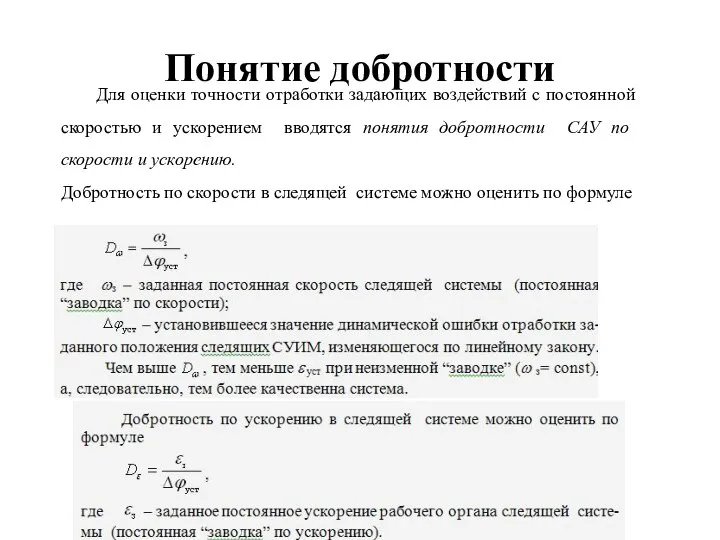
Понятие добротности
Для оценки точности отработки задающих воздействий с постоянной скоростью и
Понятие добротности
Для оценки точности отработки задающих воздействий с постоянной скоростью и
Синтез СУИМ переменной скорости
СУИМ переменной скорости требуют, как правило, регулирования не
Синтез СУИМ переменной скорости
СУИМ переменной скорости требуют, как правило, регулирования не
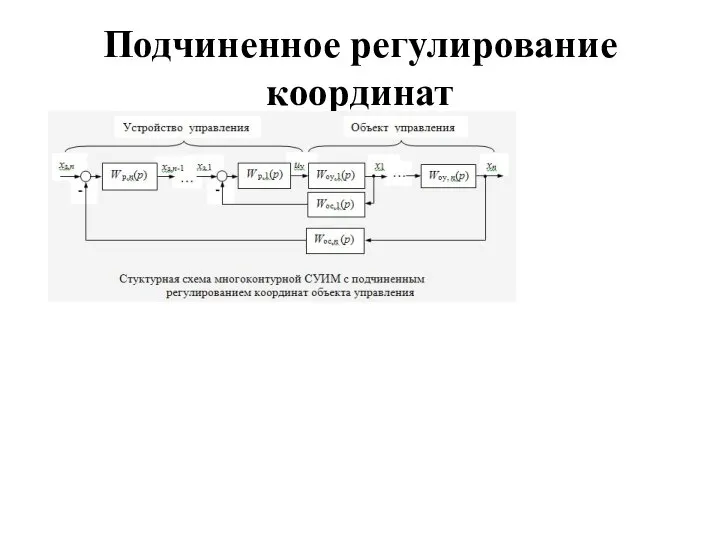
Подчиненное регулирование координат
Подчиненное регулирование координат
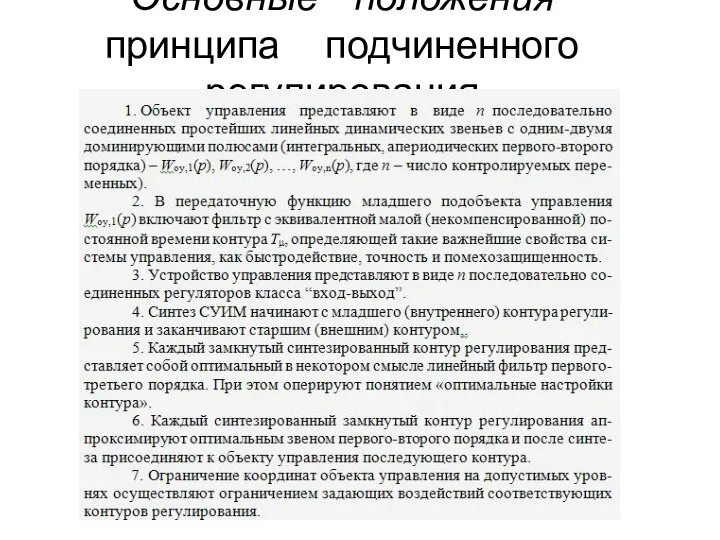
Основные положения принципа подчиненного регулирования
Основные положения принципа подчиненного регулирования

Оптимальные настройки контуров регулирования
В многоконтурных электромеханических системах подчиненного регулирования координат наиболее
Оптимальные настройки контуров регулирования
В многоконтурных электромеханических системах подчиненного регулирования координат наиболее
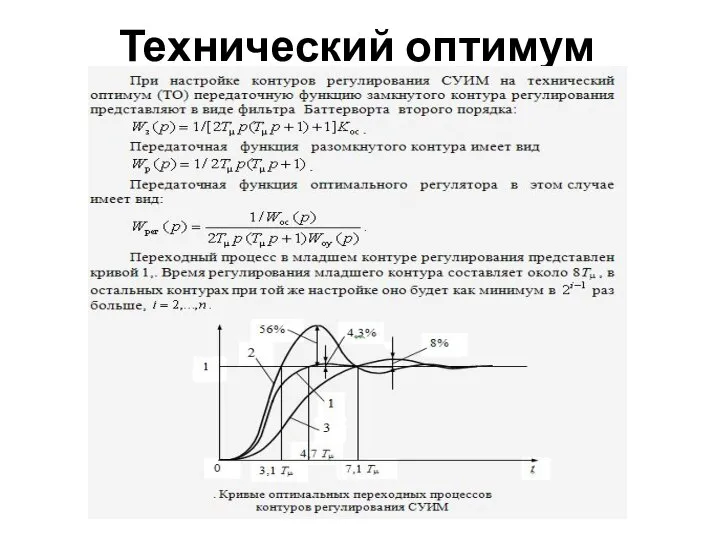
Технический оптимум
Технический оптимум
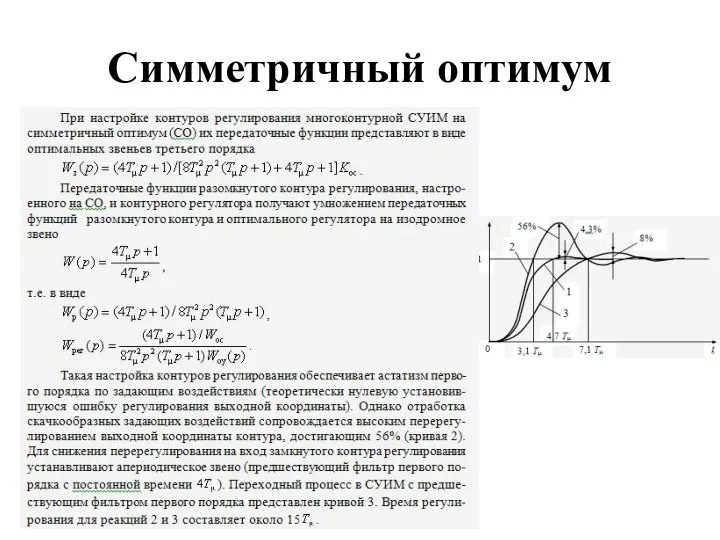
Симметричный оптимум
Симметричный оптимум
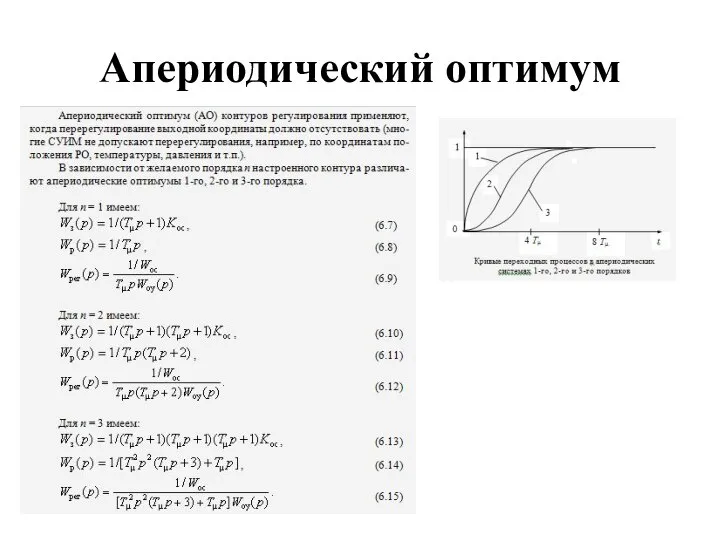
Апериодический оптимум
Апериодический оптимум
 Cинус, косинус, тангенс и котангенс угла
Cинус, косинус, тангенс и котангенс угла Таңдама тәсіл
Таңдама тәсіл Среднее арифметическое
Среднее арифметическое Умножение десятичных дробей
Умножение десятичных дробей Свойства делимости, алгебра, 8 класс
Свойства делимости, алгебра, 8 класс Параллельный перенос
Параллельный перенос Разность и её значение
Разность и её значение Считаем вместе с Минни. Приём Ромашка 1 класс
Считаем вместе с Минни. Приём Ромашка 1 класс Презентация по математике "Точки экстремума" - скачать
Презентация по математике "Точки экстремума" - скачать  Своя игра (2)
Своя игра (2) Методы многопарметрической оптимизации
Методы многопарметрической оптимизации Дифференцирование функции
Дифференцирование функции Многочлени. Узагальнення знання учнів
Многочлени. Узагальнення знання учнів Золотое сечение в природе
Золотое сечение в природе Окружность и круг
Окружность и круг Функция модуля. Ее график и свойства
Функция модуля. Ее график и свойства Сложение и вычитание десятичных дробей
Сложение и вычитание десятичных дробей Презентация по математике "Математический марафон" - скачать бесплатно
Презентация по математике "Математический марафон" - скачать бесплатно Смежные и вертикальные углы
Смежные и вертикальные углы Презентация по математике "Древний Египет" - скачать
Презентация по математике "Древний Египет" - скачать  Дискретные структуры. Комбинаторный анализ. Сочетания. Размещения
Дискретные структуры. Комбинаторный анализ. Сочетания. Размещения Тригонометрический круг
Тригонометрический круг Сокращение дробей - презентация_
Сокращение дробей - презентация_ Численный анализ нелинейных моделей и теория Куна-Таккера (Лекция 5)
Численный анализ нелинейных моделей и теория Куна-Таккера (Лекция 5) Сфера. Уравнение сферы. Площадь сферы и шара
Сфера. Уравнение сферы. Площадь сферы и шара Построение сечений методом следа секущей плоскости
Построение сечений методом следа секущей плоскости Теоремы сложения и умножения вероятностей
Теоремы сложения и умножения вероятностей Координатная плоскость. Прямоугольная система координат
Координатная плоскость. Прямоугольная система координат