- Основы расчетов движения автомобилей по дорогам

Содержание
- 2. Сопротивление движению автомобиля Силы сопротивления: - сопротивление движению на подъем Рi; - сила сопротивления движущемуся колесу
- 3. Сопротивление движению на подъем Для перемещения автомобиля по участку подъема длиной L на высоту h должна
- 4. Различают два вида трения - трение скольжения; - трение качения. Где N –модуль нормальной составляющей силы
- 5. Сопротивление воздуха состоит из : - лобового сопротивления; - трения воздуха о боковые поверхности автомобиля; -
- 6. Сопротивление инерционных сил автомобиля При массе автомобиля равной m=G/g и скорости v (м/с) инерционная сила поступательного
- 7. Динамические характеристики автомобиля где λ – коэффициент деформации шины (0,95÷0,93), ro – радиус колеса, rк –
- 8. Схема передачи вращающего момента двигателя на колеса автомобиля 1 – двигатель; 2 – маховик и сцепление;
- 9. Уравнение движения автомобиля Условие равенства внешних и внутренних сил где Рf ,Pi , Pw , Pj
- 10. Примеры динамических характеристик автомобилей
- 11. Сцепление шин с поверхностью дороги где – Pк max максимально допустимое без пробуксовывания тяговое усилие на
- 12. где m – масса автомобиля, кг; v – скорость автомобиля, м/с; R – радиус кривой, м;
- 13. При малых углах α (не более 10˚): соs α ≈1; sin α ≈ tg α ≈
- 14. Таблица 5.2 (СП 34.13330.2012) (6) Рекомендуемый радиус кривых в плане – это радиус, обеспечивающий удобное и
- 15. Назначение радиуса кривой в плане, исходя из обеспечения ночной видимости Длина дуги АВ = S. Угол,
- 16. (8)
- 17. Проектирование кривых в плане 5.7 Во всех случаях, когда смежные элементы плана трассы в месте их
- 18. Таблица 5.4 (СП 34.13330.2012) Продолжительность проезда по переходной кривой t, в течение которой центробежное ускорение возрастает
- 19. Наименьшие длины переходных кривых с линейным законом изменения кривизны (клотоид), сопрягающих прямые и кривые, в зависимости
- 20. Уширение проезжей части на кривых в плане Из подобия треугольников BCD и АВС следует:
- 21. Проектирование виражей Внешняя полоса Основные элементы виража: поперечный уклон односкатного профиля (уклон виража) iвир; длина отгона
- 22. 5.33 Односкатный поперечный профиль закругления (вираж) следует предусматривать при радиусах кривизны меньше, чем 3000 м для
- 23. Виды виражей Вираж 1-го типа iпоп=iвир Для перехода к односкатному профилю постепенно поворачивают внешнюю половину проезжей
- 25. Скачать презентацию
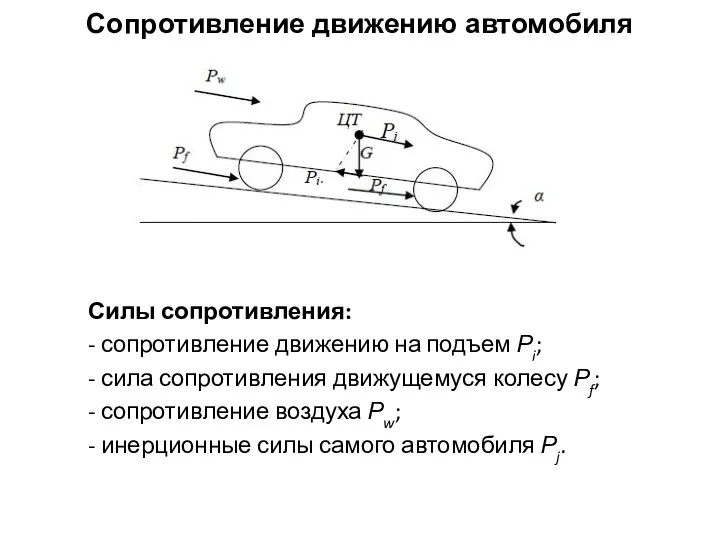
Сопротивление движению автомобиля
Силы сопротивления:
- сопротивление движению на подъем Рi;
Сопротивление движению автомобиля
Силы сопротивления:
- сопротивление движению на подъем Рi;
Сопротивление движению на подъем
Для перемещения автомобиля по участку подъема
Сопротивление движению на подъем
Для перемещения автомобиля по участку подъема
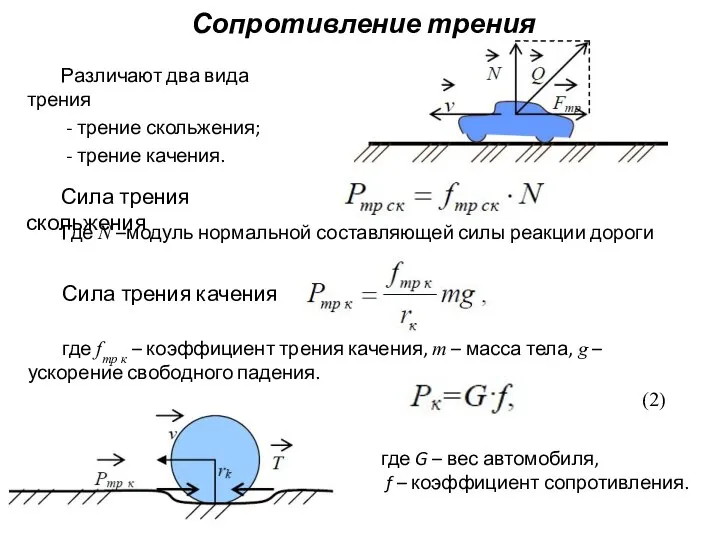
Различают два вида трения
- трение скольжения;
- трение качения.
Где
Различают два вида трения
- трение скольжения;
- трение качения.
Где
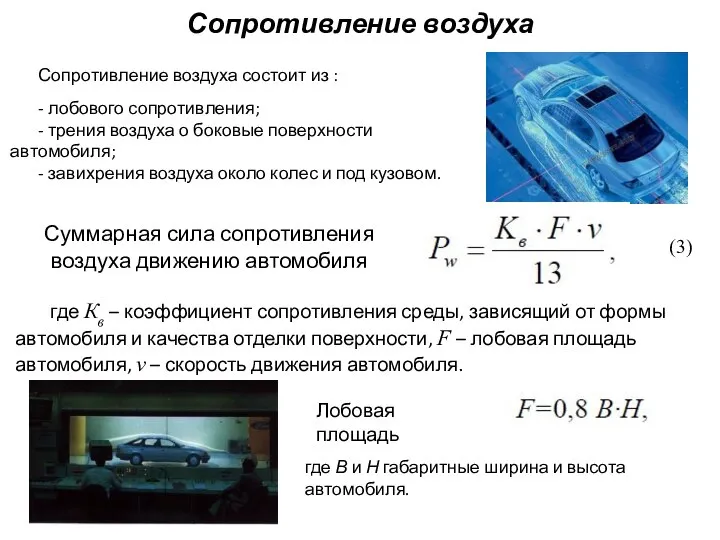
Сопротивление воздуха состоит из :
- лобового сопротивления;
- трения воздуха
Сопротивление воздуха состоит из :
- лобового сопротивления;
- трения воздуха
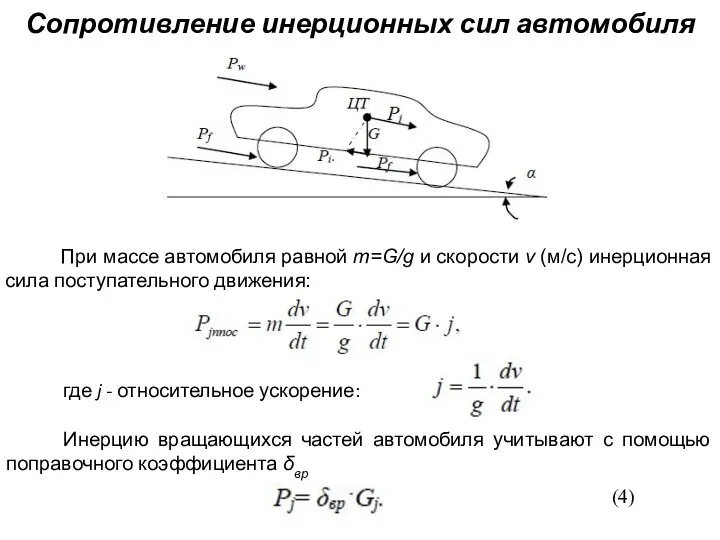
Сопротивление инерционных сил автомобиля
При массе автомобиля равной m=G/g и
Сопротивление инерционных сил автомобиля
При массе автомобиля равной m=G/g и
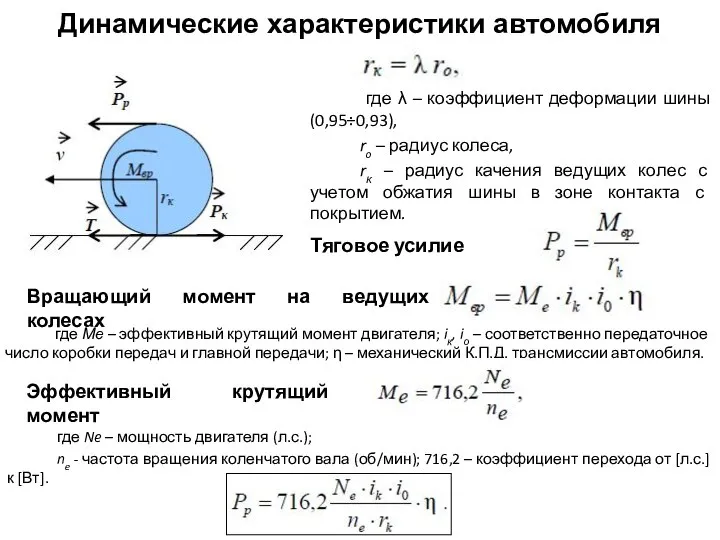
Динамические характеристики автомобиля
где λ – коэффициент деформации шины (0,95÷0,93),
ro
Динамические характеристики автомобиля
где λ – коэффициент деформации шины (0,95÷0,93),
ro
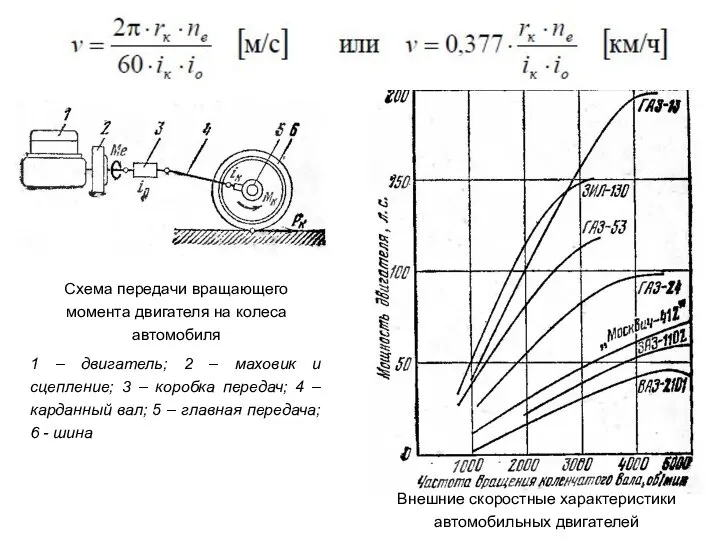
Схема передачи вращающего момента двигателя на колеса автомобиля
1 – двигатель; 2
Схема передачи вращающего момента двигателя на колеса автомобиля
1 – двигатель; 2
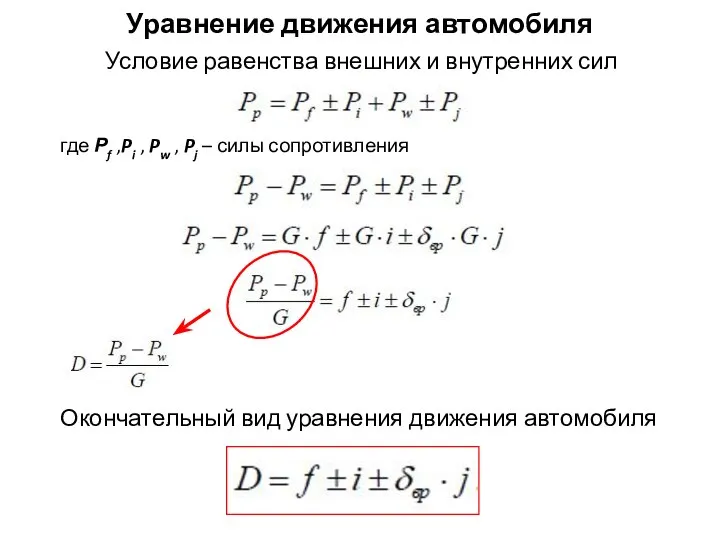
Уравнение движения автомобиля
Условие равенства внешних и внутренних сил
где
Уравнение движения автомобиля
Условие равенства внешних и внутренних сил
где
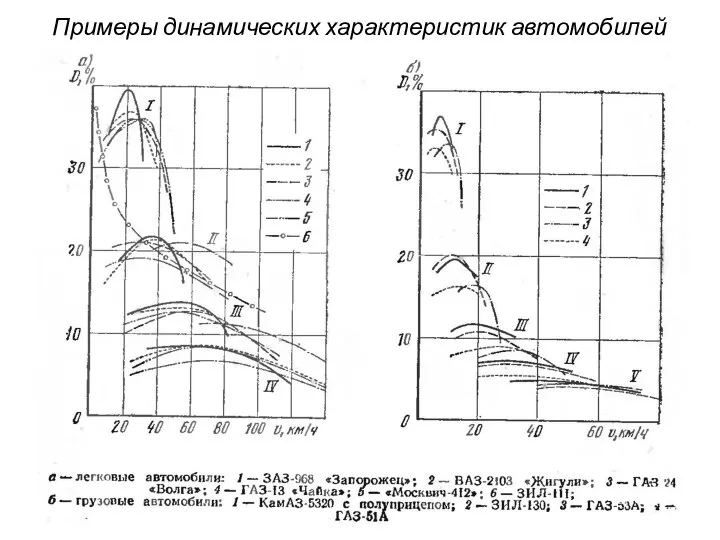
Примеры динамических характеристик автомобилей
Примеры динамических характеристик автомобилей
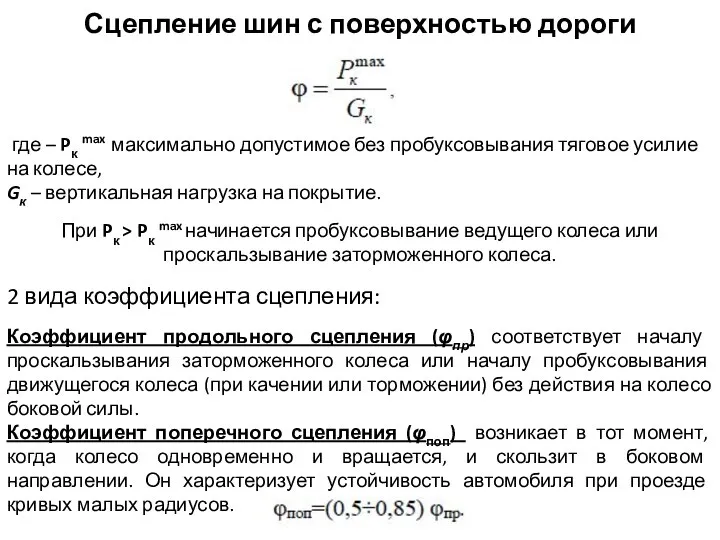
Сцепление шин с поверхностью дороги
где – Pк max максимально
Сцепление шин с поверхностью дороги
где – Pк max максимально
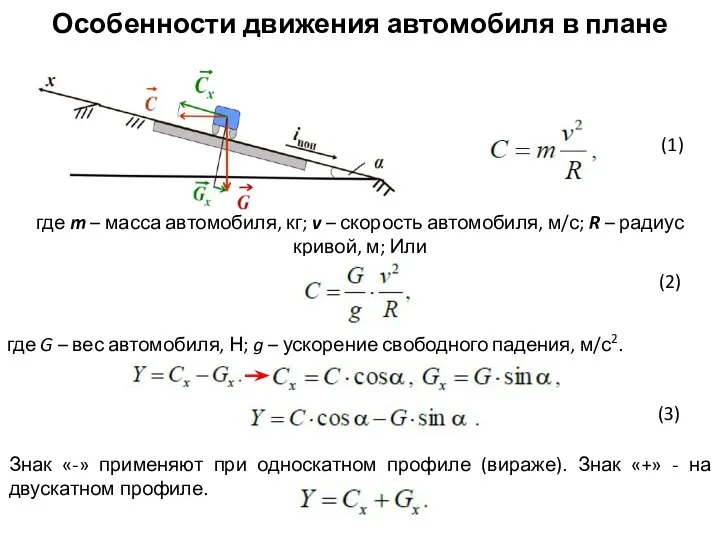
где m – масса автомобиля, кг; v – скорость автомобиля, м/с;
где m – масса автомобиля, кг; v – скорость автомобиля, м/с;
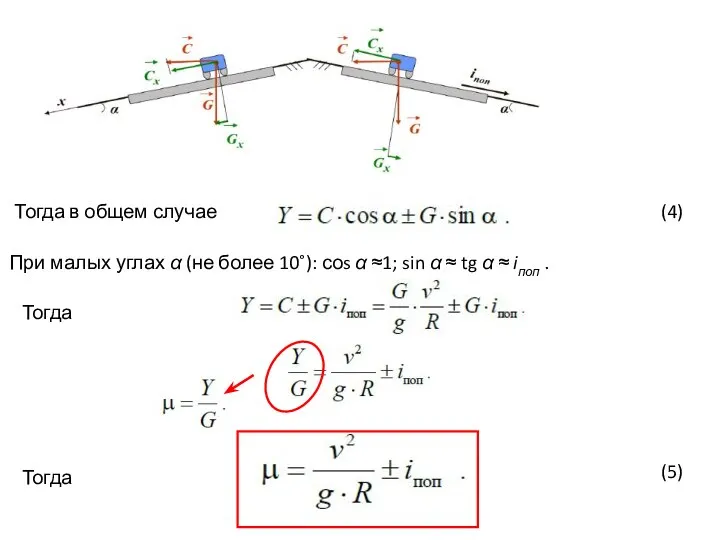
При малых углах α (не более 10˚): соs α ≈1; sin
При малых углах α (не более 10˚): соs α ≈1; sin
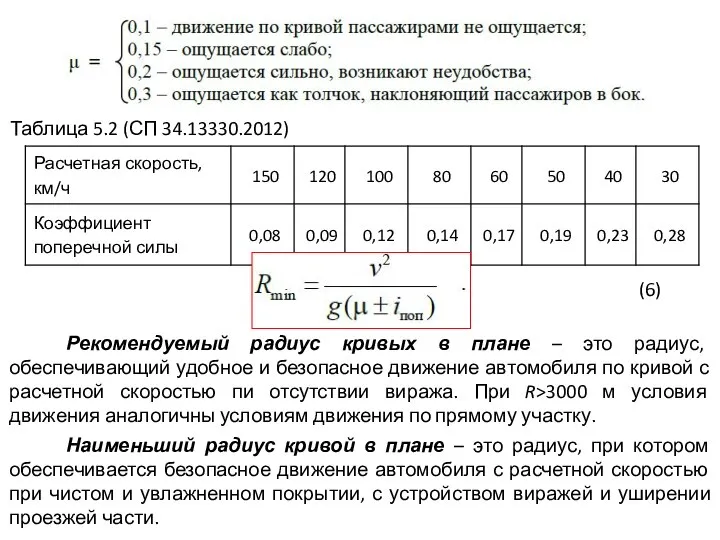
Таблица 5.2 (СП 34.13330.2012)
(6)
Рекомендуемый радиус кривых в плане – это
Таблица 5.2 (СП 34.13330.2012)
(6)
Рекомендуемый радиус кривых в плане – это
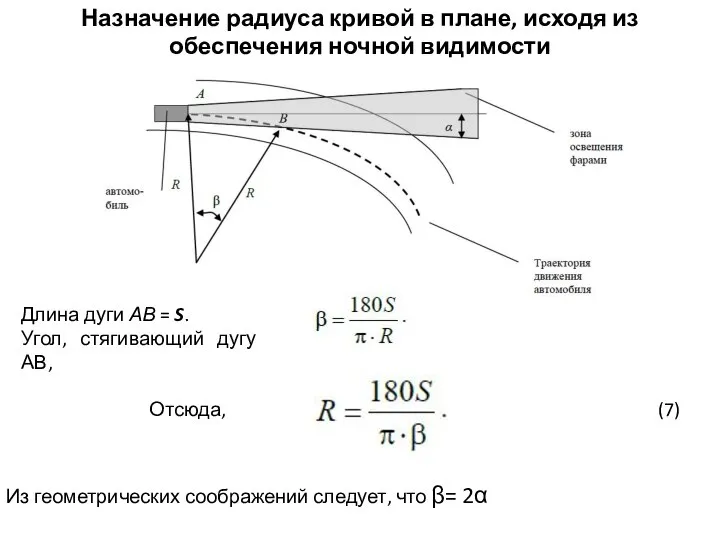
Назначение радиуса кривой в плане, исходя из обеспечения ночной видимости
Длина
Назначение радиуса кривой в плане, исходя из обеспечения ночной видимости
Длина
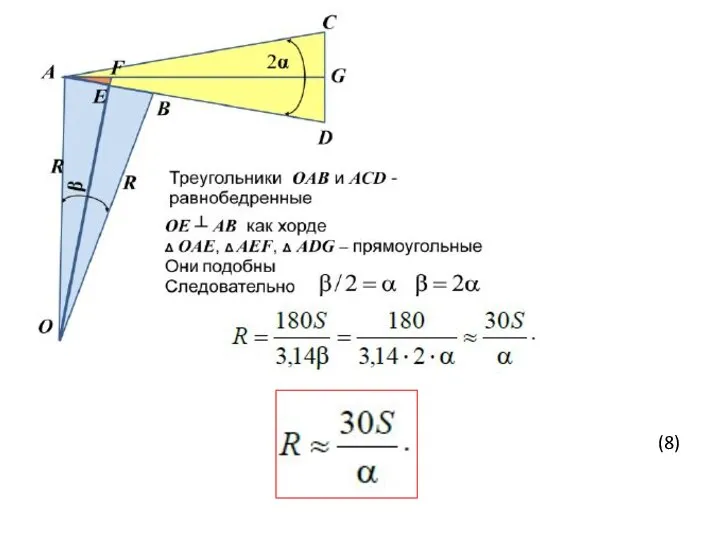
(8)
(8)

Проектирование кривых в плане
5.7 Во всех случаях, когда смежные элементы плана
Проектирование кривых в плане
5.7 Во всех случаях, когда смежные элементы плана
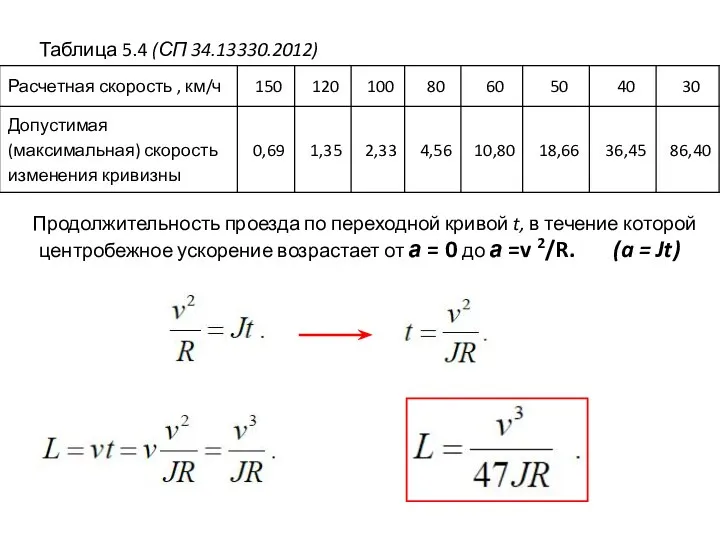
Таблица 5.4 (СП 34.13330.2012)
Продолжительность проезда по переходной кривой t,
Таблица 5.4 (СП 34.13330.2012)
Продолжительность проезда по переходной кривой t,
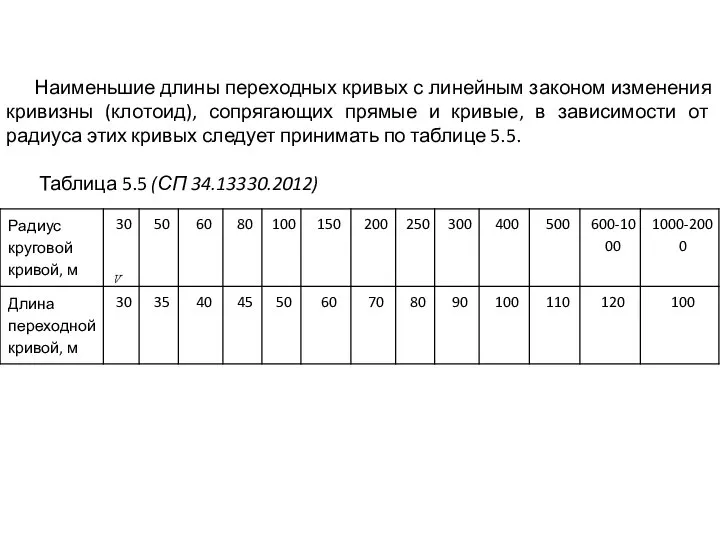
Наименьшие длины переходных кривых с линейным законом изменения кривизны (клотоид), сопрягающих прямые
Наименьшие длины переходных кривых с линейным законом изменения кривизны (клотоид), сопрягающих прямые

Уширение проезжей части на кривых в плане
Из подобия треугольников BCD
Уширение проезжей части на кривых в плане
Из подобия треугольников BCD
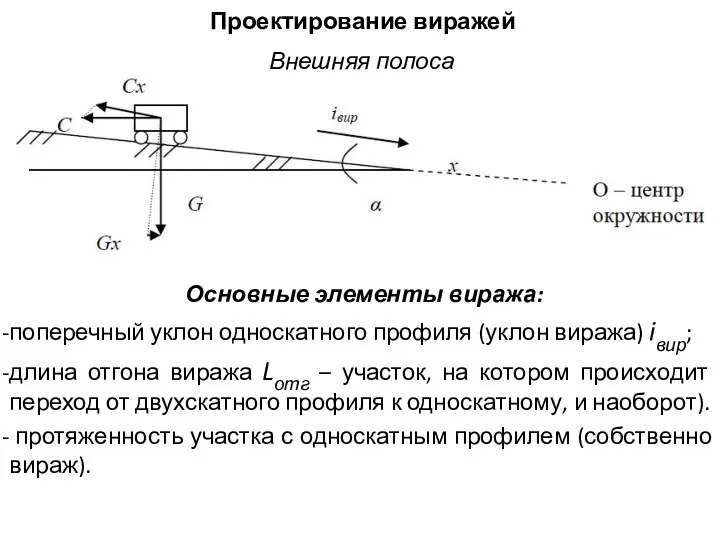
Проектирование виражей
Внешняя полоса
Основные элементы виража:
поперечный уклон
Проектирование виражей
Внешняя полоса
Основные элементы виража:
поперечный уклон
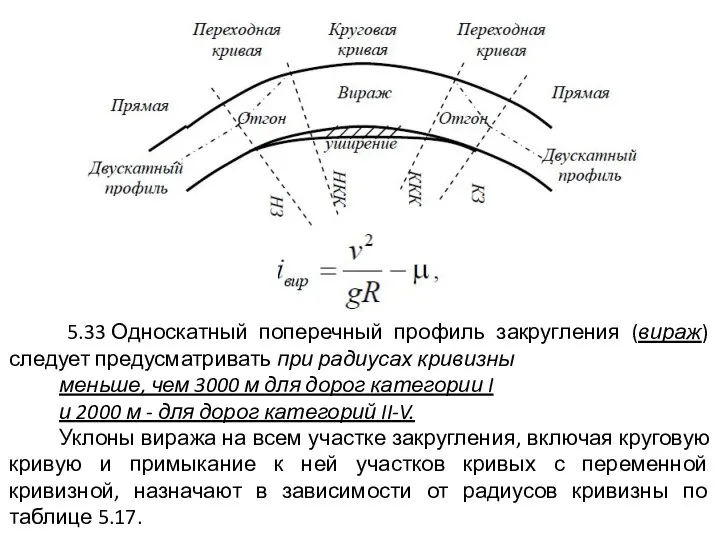
5.33 Односкатный поперечный профиль закругления (вираж) следует предусматривать при радиусах кривизны
меньше,
5.33 Односкатный поперечный профиль закругления (вираж) следует предусматривать при радиусах кривизны
меньше,
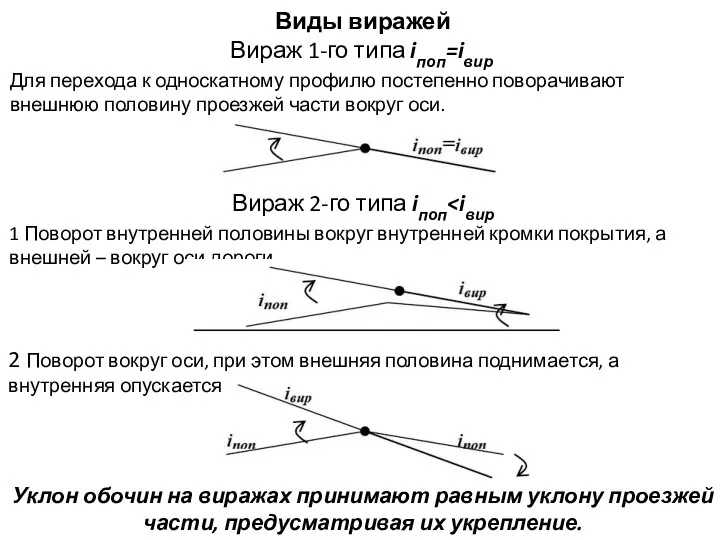
Виды виражей
Вираж 1-го типа iпоп=iвир
Для перехода к односкатному
Виды виражей
Вираж 1-го типа iпоп=iвир
Для перехода к односкатному
 Вейпинг. Польза или вред
Вейпинг. Польза или вред Бивак
Бивак Чому ліси називають легенями планети
Чому ліси називають легенями планети Кукольный театр по ПДД
Кукольный театр по ПДД Здоровье – это жизнь!
Здоровье – это жизнь! Атмосферные и гидросферные природные опасности
Атмосферные и гидросферные природные опасности Гигиена и физиология труда
Гигиена и физиология труда Здоровый образ жизни
Здоровый образ жизни Если дома ты один
Если дома ты один Управление единой государственной системой предупреждения и ликвидации ЧС, как управление техносферной безопасностью. (Лекция 3)
Управление единой государственной системой предупреждения и ликвидации ЧС, как управление техносферной безопасностью. (Лекция 3) Математика и здоровье
Математика и здоровье Источники и мероприятия по защите от электромагнитных излучений
Источники и мероприятия по защите от электромагнитных излучений Здоровьесберегающие технологии в образовательном процессе
Здоровьесберегающие технологии в образовательном процессе О вреде курения
О вреде курения Организация медицинской защиты населения в муниципальном образовании
Организация медицинской защиты населения в муниципальном образовании Теоретические основы безопасности жизнедеятельности
Теоретические основы безопасности жизнедеятельности Не будь марионеткой в руках террористов
Не будь марионеткой в руках террористов Охрана труда. Основные понятия
Охрана труда. Основные понятия Безопасность пищи. Food Safety
Безопасность пищи. Food Safety Основные факторы воздействия компьютера на организм человека. Требования к помещениям в которых установлены компьютеры
Основные факторы воздействия компьютера на организм человека. Требования к помещениям в которых установлены компьютеры Салауатты өмір салты туралы жаңа көзқарас
Салауатты өмір салты туралы жаңа көзқарас Влияние табачного дыма на организм
Влияние табачного дыма на организм Апаратурне оформлення небезпечних виробництв. Класифікація апаратів і машин та вимоги до їх надійності. (Лекция 3)
Апаратурне оформлення небезпечних виробництв. Класифікація апаратів і машин та вимоги до їх надійності. (Лекция 3) Влияние IT и видеоигр на людей с ограниченными способностями
Влияние IT и видеоигр на людей с ограниченными способностями Здоровое питание
Здоровое питание Электромагнитные поля и излучения, их характеристика, влияние на здоровье человека, методы защиты от их влияния
Электромагнитные поля и излучения, их характеристика, влияние на здоровье человека, методы защиты от их влияния Дослідження опору тіла людини електричному струму
Дослідження опору тіла людини електричному струму Дневник участника эксперимента.Вода
Дневник участника эксперимента.Вода