- Требования к видимости на дорогах. Торможение автомобиля

Содержание
- 2. Торможение автомобиля Виды торможения: - служебное торможение; - экстренное. где l1 – путь, проходимый автомобилем за
- 3. где v – скорость автомобиля, км/ч; t – время реакции водителя, с; Кэ – коэффициент эффективного
- 4. Требования к видимости на дорогах Расчетная видимость – предельное расстояние видимости до встречного автомобиля или поверхности
- 5. Расстояние видимости из условия обгона (второй случай, когда видимость должна быть обеспечена при объезде или обгоне
- 6. Боковая видимость Максимальное необходимое расстояние боковой видимости: где vам – расчетная скорость автомобиля; vтс – скорость
- 8. Скачать презентацию
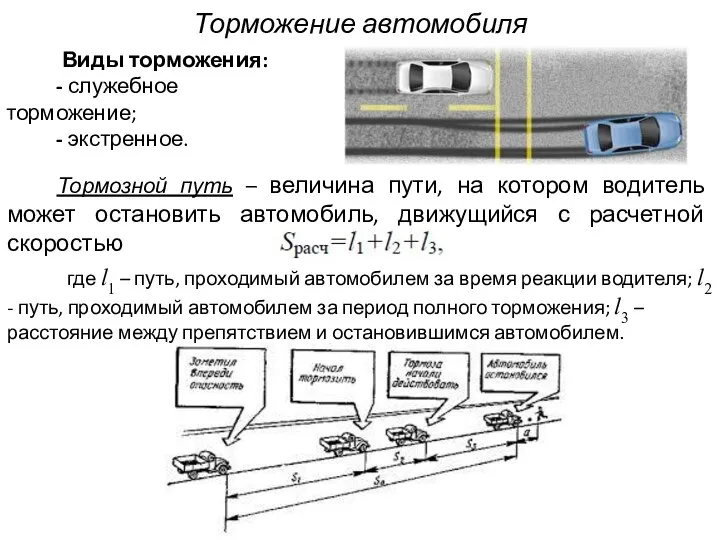
Торможение автомобиля
Виды торможения:
- служебное торможение;
- экстренное.
Торможение автомобиля
Виды торможения:
- служебное торможение;
- экстренное.
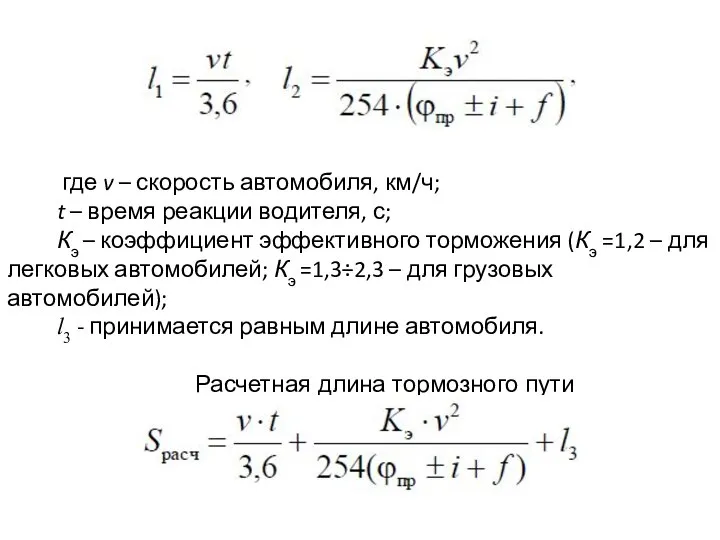
где v – скорость автомобиля, км/ч;
t – время реакции
где v – скорость автомобиля, км/ч;
t – время реакции
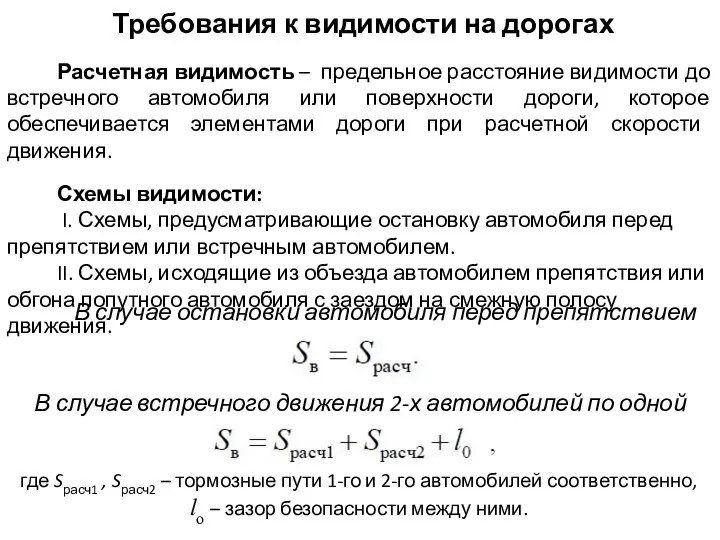
Требования к видимости на дорогах
Расчетная видимость – предельное расстояние
Требования к видимости на дорогах
Расчетная видимость – предельное расстояние

Расстояние видимости из условия обгона
(второй случай, когда видимость должна быть обеспечена
Расстояние видимости из условия обгона
(второй случай, когда видимость должна быть обеспечена
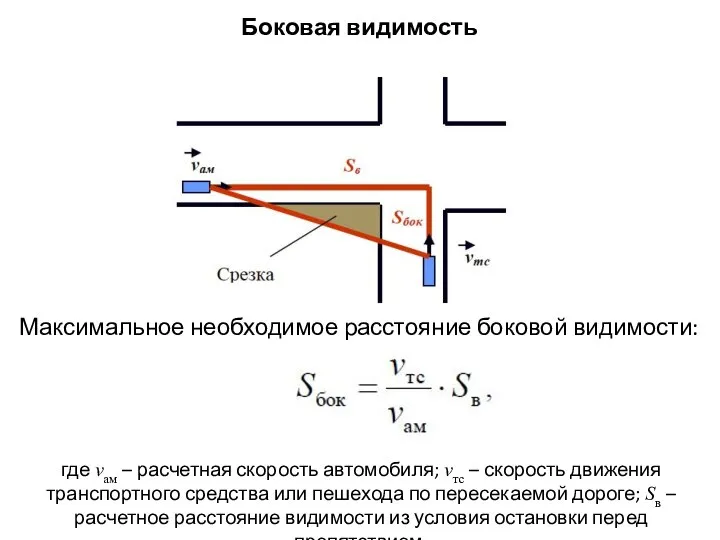
Боковая видимость
Максимальное необходимое расстояние боковой видимости:
где vам – расчетная скорость автомобиля;
Боковая видимость
Максимальное необходимое расстояние боковой видимости:
где vам – расчетная скорость автомобиля;
 Еңбек гигиенасы зертханасының қазіргі кездегі құрал-жабдықтары
Еңбек гигиенасы зертханасының қазіргі кездегі құрал-жабдықтары Безопасность жизнедеятельности и её значение в современном обществе
Безопасность жизнедеятельности и её значение в современном обществе Предупреждающие знаки
Предупреждающие знаки Влияние загрязнения окружающей среды на биохимические процессы, происходящие в организме человека
Влияние загрязнения окружающей среды на биохимические процессы, происходящие в организме человека Запрещенные предметы на стадионах чемпионатах мира
Запрещенные предметы на стадионах чемпионатах мира Защита населения и территорий от чрезвычайных ситуаций
Защита населения и территорий от чрезвычайных ситуаций Правила поведения дома и на улице
Правила поведения дома и на улице Здоровый образ жизни студентов
Здоровый образ жизни студентов Безопасный отдых на воде. 8 класс
Безопасный отдых на воде. 8 класс Система обеспечения вызова экстренных оперативных и иных служб жизнеобеспечения по единому номеру «112» (система-112)
Система обеспечения вызова экстренных оперативных и иных служб жизнеобеспечения по единому номеру «112» (система-112) Правила поведения на дороге
Правила поведения на дороге Спецназ МЧС
Спецназ МЧС Порядок эвакуации детей при возникновении пожара в детском саду
Порядок эвакуации детей при возникновении пожара в детском саду Наркотики и их последствия для здоровья
Наркотики и их последствия для здоровья Здоровый образ жизни. Понятие о режиме
Здоровый образ жизни. Понятие о режиме Основные понятия теории управления безопасностью
Основные понятия теории управления безопасностью Вплив електричного струму на організм людини
Вплив електричного струму на організм людини Характерні причини виникнення пожеж. Поняття вогнестійкості. Пожежна техніка
Характерні причини виникнення пожеж. Поняття вогнестійкості. Пожежна техніка Современные методы контрацепции
Современные методы контрацепции Легче, чем пожар тушить, нам его предупредить
Легче, чем пожар тушить, нам его предупредить Дорожные знаки. (4 класс)
Дорожные знаки. (4 класс) Техника безопасности для учащихся на занятиях по баскетболу
Техника безопасности для учащихся на занятиях по баскетболу Отравления в быту
Отравления в быту Я выбираю жизнь
Я выбираю жизнь Правила дорожного движения для родителей
Правила дорожного движения для родителей Инструмент для выполнения специальных работ на пожарах, классификация, назначение, устройство и технические характеристики
Инструмент для выполнения специальных работ на пожарах, классификация, назначение, устройство и технические характеристики Управление риском
Управление риском Биобезопасность и биоэтика в биотехнологии
Биобезопасность и биоэтика в биотехнологии