- 3D EQUALIZER the cuting edge of matchmoving. - презентация

Содержание
- 2. MATCH MOVING
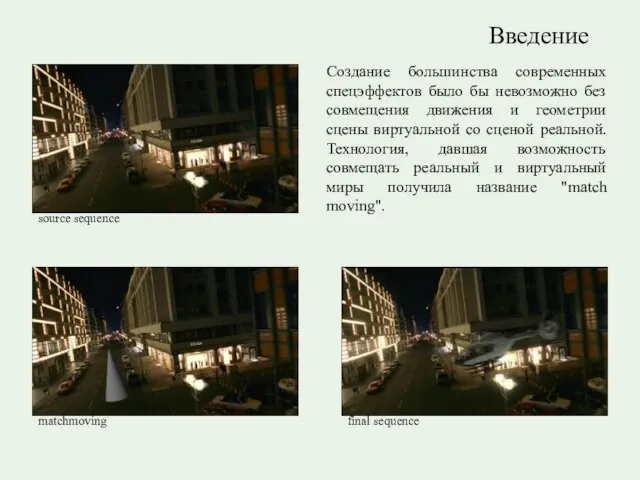
- 3. Введение Создание большинства современных спецэффектов было бы невозможно без совмещения движения и геометрии сцены виртуальной со
- 4. Терминология Match moving ("camera tracking", "3d tracking", "3d tracing") – это процесс вычисления трехмерной траектории камеры
- 5. Этапы развития технологии Этап 1. Руки, руки, и еще раз руки. На этом этапе существовал только
- 6. Этапы развития технологии Этап 2. Аппаратный. Motion Control Systems. Десять-двенадцать лет назад программного трэкинга камеры не
- 7. Этапы развития технологии Этап 3. Программно-аппаратный. Системы Motion Control по прежнему актуальны во многих ситуациях, но
- 8. Эволюция программных систем Изначально появился так называемый "survey-base tracking". Название обусловлено тем, что пользователь должен был
- 9. Применение 3D Equalizer Виртуальные (CG) объекты, помещенные в реальную среду. В создании архитектурной визуализации такие объекты
- 10. Применение 3D Equalizer Стабилизация. Вы, конечно, смотрели фильмы из серии "Matrix", в которых активно применялась технология
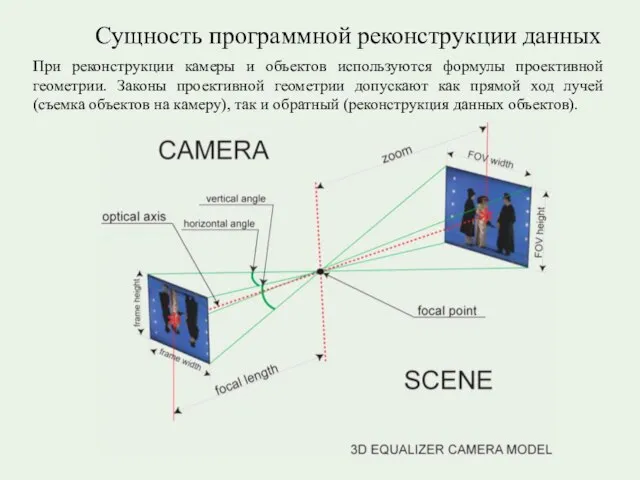
- 11. Сущность программной реконструкции данных При реконструкции камеры и объектов используются формулы проективной геометрии. Законы проективной геометрии
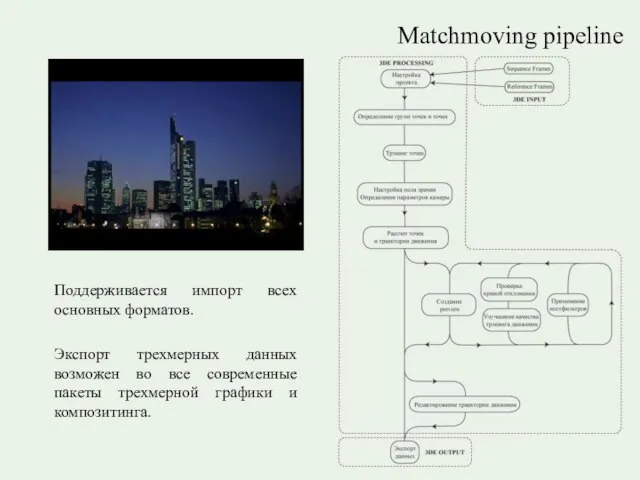
- 12. Matchmoving pipeline Поддерживается импорт всех основных форматов. Экспорт трехмерных данных возможен во все современные пакеты трехмерной
- 13. Условия успешного трэкинга Для успешной реконструкции трехмерных данных пользователь должен предоставить программе достаточное количество информации. Общие
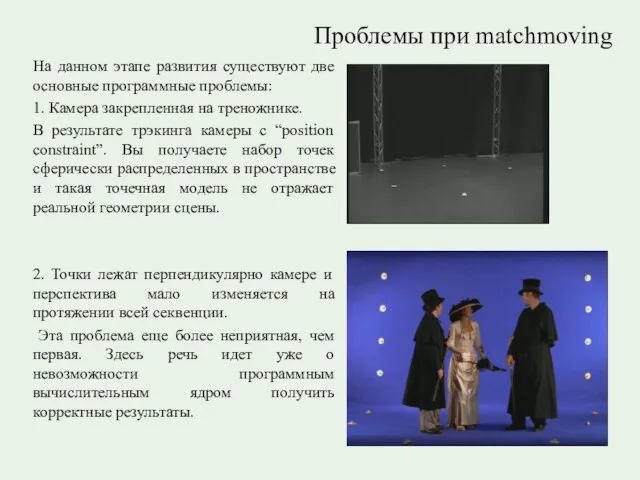
- 14. Проблемы при matchmoving На данном этапе развития существуют две основные программные проблемы: 1. Камера закрепленная на
- 15. Решение проблем при matchmoving В обоих вышеперечисленных случаях на помощь нам приходят reference frames. reference frames
- 16. Pipeline и концепция сред каждая из сред соответствует этапу 3d трэкинга
- 17. MOTION CAPTURE
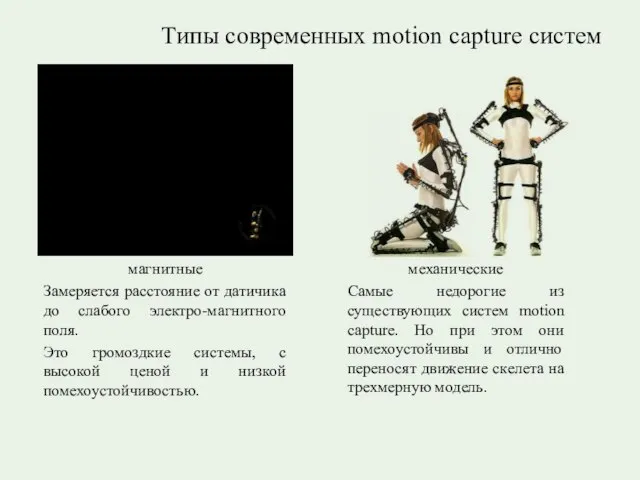
- 18. Типы современных motion capture систем магнитные Замеряется расстояние от датичика до слабого электро-магнитного поля. Это громоздкие
- 19. Типы современных motion capture систем Оптические В основе лежит система построенная на инфракрасных датчиках и фиксирующих
- 20. Софтверный Motion Capture Софтверный motion capture – это неплохой способ сэкономить на дорогостоящем оборудовании. В отличие
- 21. PHOTOGRAMMETRY «image modeling»
- 23. Скачать презентацию

MATCH MOVING
MATCH MOVING
Введение
Создание большинства современных спецэффектов было бы невозможно без совмещения движения и
Введение
Создание большинства современных спецэффектов было бы невозможно без совмещения движения и
Терминология
Match moving ("camera tracking", "3d tracking", "3d tracing") – это процесс
Терминология
Match moving ("camera tracking", "3d tracking", "3d tracing") – это процесс
Этапы развития технологии
Этап 1. Руки, руки, и еще раз руки.
На этом
Этапы развития технологии
Этап 1. Руки, руки, и еще раз руки.
На этом
Этапы развития технологии
Этап 2. Аппаратный. Motion Control Systems.
Десять-двенадцать лет назад программного
Этапы развития технологии
Этап 2. Аппаратный. Motion Control Systems.
Десять-двенадцать лет назад программного
Этапы развития технологии
Этап 3. Программно-аппаратный.
Системы Motion Control по прежнему актуальны во
Этапы развития технологии
Этап 3. Программно-аппаратный.
Системы Motion Control по прежнему актуальны во
Эволюция программных систем
Изначально появился так называемый "survey-base tracking". Название обусловлено тем,
Эволюция программных систем
Изначально появился так называемый "survey-base tracking". Название обусловлено тем,
Применение 3D Equalizer
Виртуальные (CG) объекты, помещенные в реальную среду. В создании
Применение 3D Equalizer
Виртуальные (CG) объекты, помещенные в реальную среду. В создании
Применение 3D Equalizer
Стабилизация. Вы, конечно, смотрели фильмы из серии "Matrix", в
Применение 3D Equalizer
Стабилизация. Вы, конечно, смотрели фильмы из серии "Matrix", в
Сущность программной реконструкции данных
При реконструкции камеры и объектов используются формулы проективной
Сущность программной реконструкции данных
При реконструкции камеры и объектов используются формулы проективной
Matchmoving pipeline
Поддерживается импорт всех основных форматов.
Экспорт трехмерных данных возможен во все
Matchmoving pipeline
Поддерживается импорт всех основных форматов.
Экспорт трехмерных данных возможен во все
Условия успешного трэкинга
Для успешной реконструкции трехмерных данных пользователь должен предоставить программе
Условия успешного трэкинга
Для успешной реконструкции трехмерных данных пользователь должен предоставить программе
Проблемы при matchmoving
На данном этапе развития существуют две основные программные проблемы:
1.
Проблемы при matchmoving
На данном этапе развития существуют две основные программные проблемы:
1.
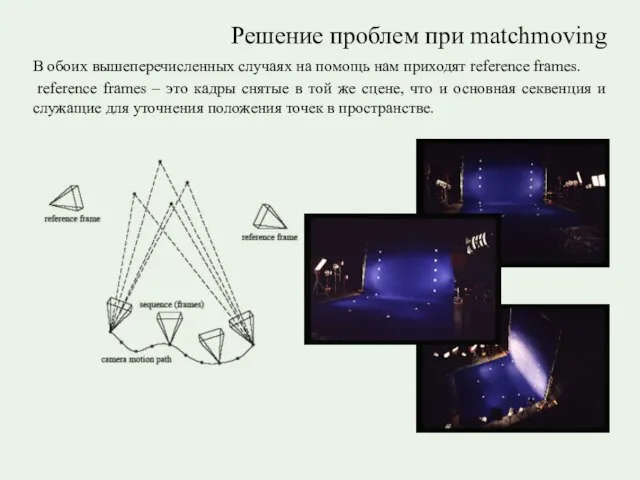
Решение проблем при matchmoving
В обоих вышеперечисленных случаях на помощь нам приходят
Решение проблем при matchmoving
В обоих вышеперечисленных случаях на помощь нам приходят
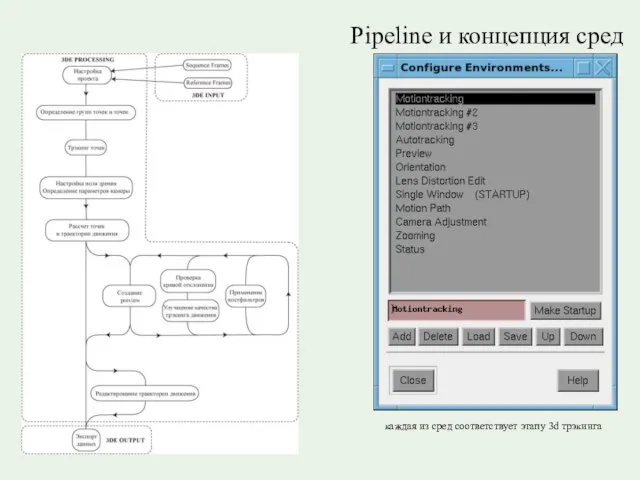
Pipeline и концепция сред
каждая из сред соответствует этапу 3d трэкинга
Pipeline и концепция сред
каждая из сред соответствует этапу 3d трэкинга
MOTION CAPTURE
MOTION CAPTURE
Типы современных motion capture систем
магнитные
Замеряется расстояние от датичика до слабого электро-магнитного
Типы современных motion capture систем
магнитные
Замеряется расстояние от датичика до слабого электро-магнитного
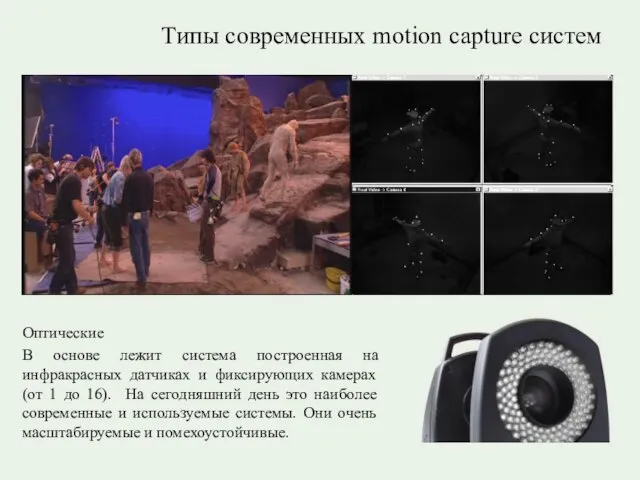
Типы современных motion capture систем
Оптические
В основе лежит система построенная на инфракрасных
Типы современных motion capture систем
Оптические
В основе лежит система построенная на инфракрасных
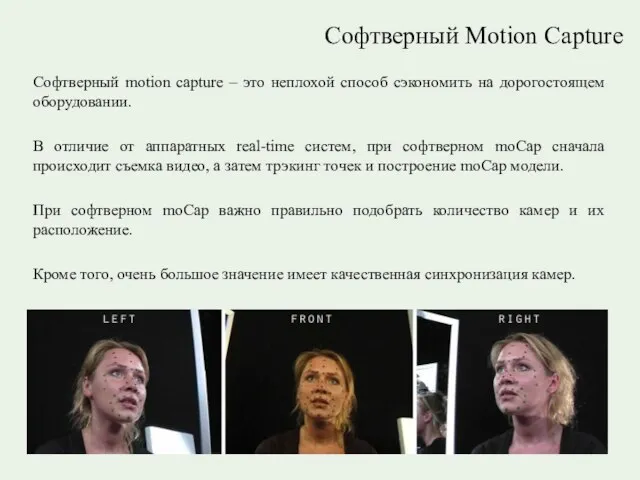
Софтверный Motion Capture
Софтверный motion capture – это неплохой способ сэкономить на
Софтверный Motion Capture
Софтверный motion capture – это неплохой способ сэкономить на
PHOTOGRAMMETRY
«image modeling»
PHOTOGRAMMETRY
«image modeling»
 Правовая охрана информации.
Правовая охрана информации. Лоскутное шитьё Мечты младенца Выполнила: Пономаренко Юлия Владимировна Ученица 11”Б” класса МОУ-СОШ № 8 г. Бердска 2009г.
Лоскутное шитьё Мечты младенца Выполнила: Пономаренко Юлия Владимировна Ученица 11”Б” класса МОУ-СОШ № 8 г. Бердска 2009г. Этап изготовления изделия проекта 5 класс Автор: Мурнукова Светлана Анатольевна Место работы, должность: МАОУ межшкольный учеб
Этап изготовления изделия проекта 5 класс Автор: Мурнукова Светлана Анатольевна Место работы, должность: МАОУ межшкольный учеб Поделки из соленого теста. Творческие работы учеников 4б класса Учитель Киргизова С.А. 2013 год
Поделки из соленого теста. Творческие работы учеников 4б класса Учитель Киргизова С.А. 2013 год 1.Введение 2.Немного теории a.Концептуальная диаграмма b.Суть фреймворка c.Как это работает 3.Пример: IT Developers v1 4.Actionscript 3 [Multicore version] - пр
1.Введение 2.Немного теории a.Концептуальная диаграмма b.Суть фреймворка c.Как это работает 3.Пример: IT Developers v1 4.Actionscript 3 [Multicore version] - пр Правила оформления чертежа - презентация к уроку Технологии_
Правила оформления чертежа - презентация к уроку Технологии_ Аппликация из листьев - презентация к уроку Технологии
Аппликация из листьев - презентация к уроку Технологии Тепловой двигатель – друг или враг? - презентация к уроку Технологии_
Тепловой двигатель – друг или враг? - презентация к уроку Технологии_ Техника вязания крючком - презентация к уроку Технологии
Техника вязания крючком - презентация к уроку Технологии Виды резьбы по дереву Ученика 6 класса Бичка Евгения
Виды резьбы по дереву Ученика 6 класса Бичка Евгения История развития русских шрифтов - презентация к уроку Технологии
История развития русских шрифтов - презентация к уроку Технологии Татьяна Сергеевна Русских учитель швейного дела Конкурс «Чудеса своими
Татьяна Сергеевна Русских учитель швейного дела Конкурс «Чудеса своими  Руководство пользования сервисом PhotoPeach.com
Руководство пользования сервисом PhotoPeach.com Дефекты тканей - презентация к уроку Технологии
Дефекты тканей - презентация к уроку Технологии Приготовление котлетной массы. Полуфабрикаты из неё - презентация к уроку Технологии
Приготовление котлетной массы. Полуфабрикаты из неё - презентация к уроку Технологии Вышивка шёлковыми ___лентами Подготовила учитель технологии моу гимназии Пантелейчук П.Н. г. Белореченс
Вышивка шёлковыми ___лентами Подготовила учитель технологии моу гимназии Пантелейчук П.Н. г. Белореченс Технологическое творчество - презентация к уроку Технологии_
Технологическое творчество - презентация к уроку Технологии_ Тема: "Чугуны. Классификация чугунов"
Тема: "Чугуны. Классификация чугунов" ТРАНСМИССИЯ Тема: « Конструкция трансмиссии автомобилей»
ТРАНСМИССИЯ Тема: « Конструкция трансмиссии автомобилей»  Поясная одежда
Поясная одежда  Какви са видовете вируси и как работят? изготвил: Велина Георгиева Георгиева спец.”Информатика” ФN: 7168 5 курс
Какви са видовете вируси и как работят? изготвил: Велина Георгиева Георгиева спец.”Информатика” ФN: 7168 5 курс Филиал ОАО «ИНЖЕНЕРНЫЙ ЦЕНТР ЕЭС» «ФИРМА ОРГРЭС» Методы борьбы в России с вибрацией, гололедом и пляской проводов и грозозащит
Филиал ОАО «ИНЖЕНЕРНЫЙ ЦЕНТР ЕЭС» «ФИРМА ОРГРЭС» Методы борьбы в России с вибрацией, гололедом и пляской проводов и грозозащит Mind The Bird! Запуск Firebird 2.5
Mind The Bird! Запуск Firebird 2.5 Android-разработка: как начать, лучшие практики и интересные фишки
Android-разработка: как начать, лучшие практики и интересные фишки Рамочка для фото
Рамочка для фото ПАННО «ЗОЛОТАЯ РЫБКА» Автор: Медведева Дарья ученица 7 класса Верхнесоленовской СОШ Ростовской области Руководитель: учитель изо
ПАННО «ЗОЛОТАЯ РЫБКА» Автор: Медведева Дарья ученица 7 класса Верхнесоленовской СОШ Ростовской области Руководитель: учитель изо Плавающие подсвечники Выполнила: учитель технологии высшей категории МОУ СОШ №8 Салова Маргарита Михайловна
Плавающие подсвечники Выполнила: учитель технологии высшей категории МОУ СОШ №8 Салова Маргарита Михайловна Презентация на тему: Аппликация из ткани
Презентация на тему: Аппликация из ткани