- Actuators and sensors. part II

Содержание
- 2. INTRODUCTION Robotic sensing is a branch of robotics science intended to give robots sensing capabilities, so
- 3. PHYSICAL MEASUREMENTS AS INPUT
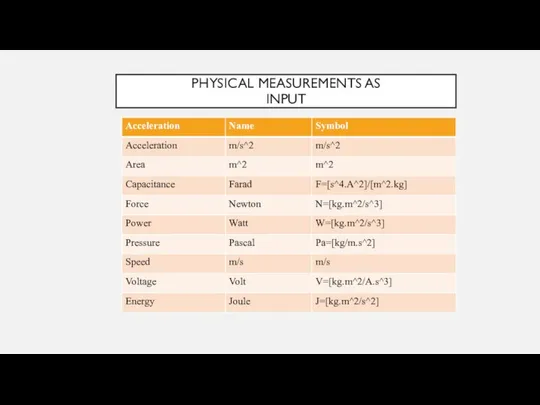
- 4. PHYSICAL MEASUREMENTS AS INPUT
- 5. ACTIVE VS. PASSIVE SENSORS Active sensors: Active remote sensors create their own electromagnetic energy that is
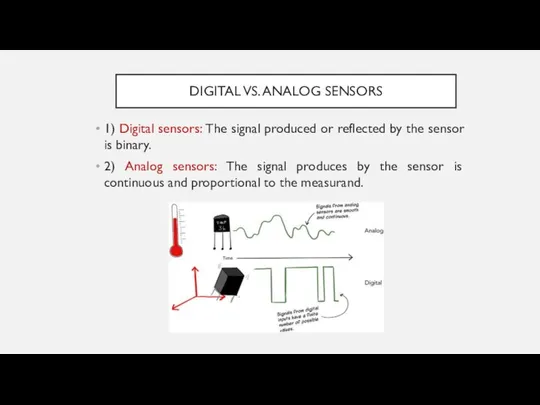
- 6. DIGITAL VS. ANALOG SENSORS 1) Digital sensors: The signal produced or reflected by the sensor is
- 7. DIGITAL SENSORS Digital sensors are more straight forward than Analog No matter what the sensor there
- 8. ANALOG SENSORS
- 9. NULL AND DEFLECTION METHODS
- 10. INPUT-OUTPUT CONFIGURATION
- 11. VISION Method: The visual sensing system can be based on anything from the traditional camera, sonar,
- 12. TOUCH Signal Processing: Touch sensory signals can be generated by the robot's own movements. It is
- 13. HEARING Signal processing: Accurate audio sensor requires low internal noise contribution. Traditionally, audio sensors combine acoustical
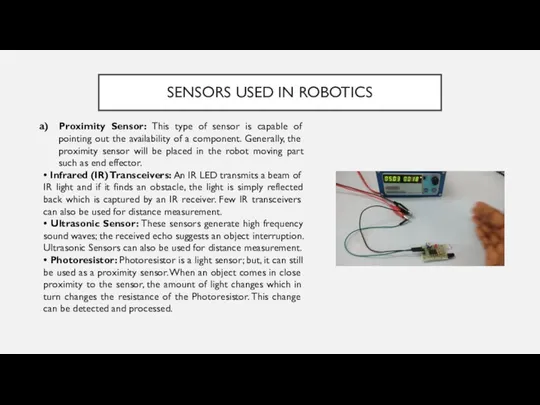
- 14. SENSORS USED IN ROBOTICS Proximity Sensor: This type of sensor is capable of pointing out the
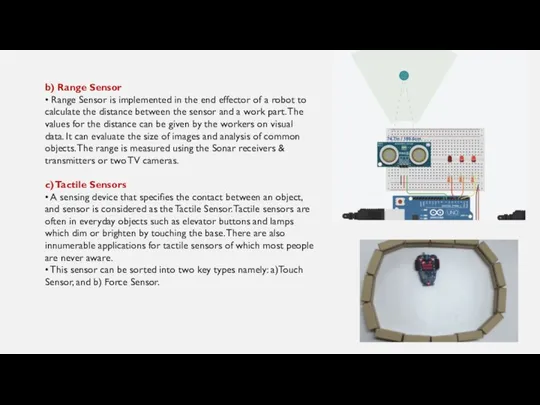
- 15. b) Range Sensor • Range Sensor is implemented in the end effector of a robot to
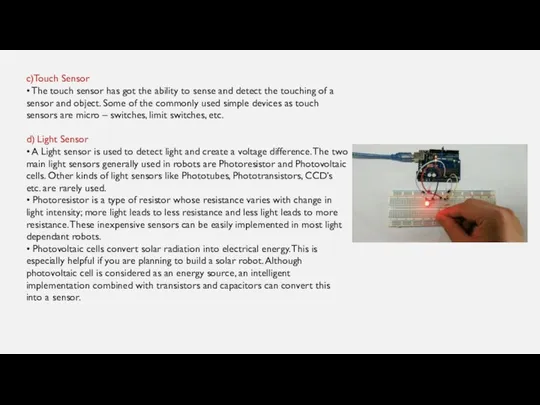
- 16. c)Touch Sensor • The touch sensor has got the ability to sense and detect the touching
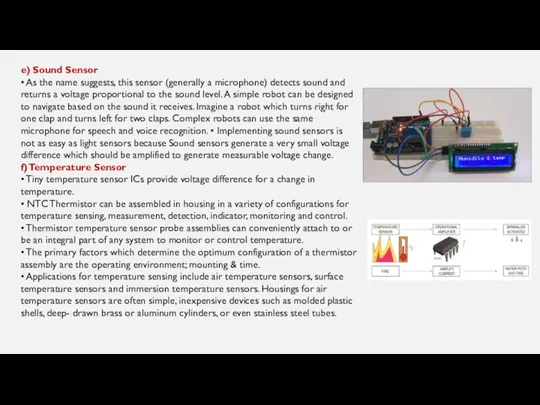
- 17. e) Sound Sensor • As the name suggests, this sensor (generally a microphone) detects sound and
- 19. Скачать презентацию

INTRODUCTION
Robotic sensing is a branch of robotics science intended to give
INTRODUCTION
Robotic sensing is a branch of robotics science intended to give
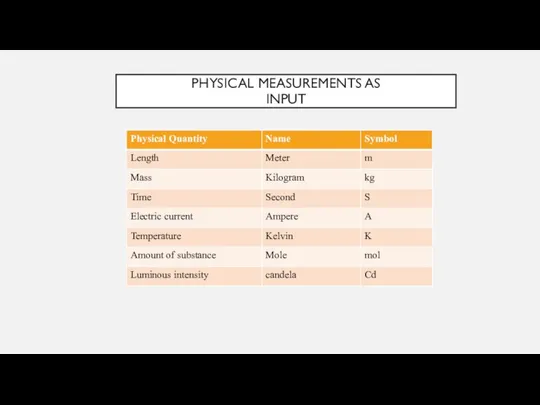
PHYSICAL MEASUREMENTS AS
INPUT
PHYSICAL MEASUREMENTS AS
INPUT
PHYSICAL MEASUREMENTS AS
INPUT
PHYSICAL MEASUREMENTS AS
INPUT
ACTIVE VS. PASSIVE SENSORS
Active sensors: Active remote sensors create their
ACTIVE VS. PASSIVE SENSORS
Active sensors: Active remote sensors create their
DIGITAL VS. ANALOG SENSORS
1) Digital sensors: The signal produced or
DIGITAL VS. ANALOG SENSORS
1) Digital sensors: The signal produced or
DIGITAL SENSORS
Digital sensors are more straight forward than Analog
No matter
DIGITAL SENSORS
Digital sensors are more straight forward than Analog
No matter
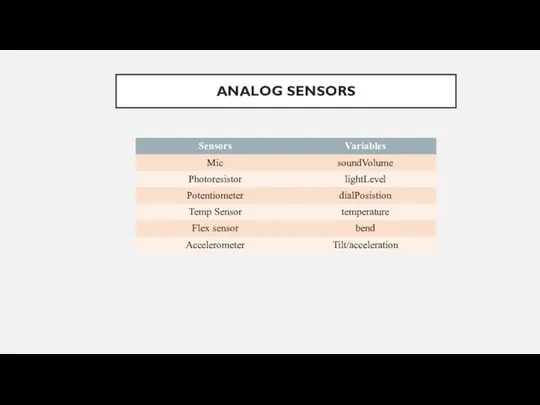
ANALOG SENSORS
ANALOG SENSORS
NULL AND DEFLECTION METHODS
NULL AND DEFLECTION METHODS
INPUT-OUTPUT CONFIGURATION
INPUT-OUTPUT CONFIGURATION
VISION
Method: The visual sensing system can be based on anything from
VISION
Method: The visual sensing system can be based on anything from
TOUCH
Signal Processing: Touch sensory signals can be generated by the robot's
TOUCH
Signal Processing: Touch sensory signals can be generated by the robot's
HEARING
Signal processing: Accurate audio sensor requires low internal noise contribution. Traditionally,
HEARING
Signal processing: Accurate audio sensor requires low internal noise contribution. Traditionally,
SENSORS USED IN ROBOTICS
Proximity Sensor: This type of sensor is capable
SENSORS USED IN ROBOTICS
Proximity Sensor: This type of sensor is capable
b) Range Sensor
• Range Sensor is implemented in the end
b) Range Sensor
• Range Sensor is implemented in the end
c)Touch Sensor
• The touch sensor has got the ability to
c)Touch Sensor
• The touch sensor has got the ability to
e) Sound Sensor
• As the name suggests, this sensor (generally
e) Sound Sensor
• As the name suggests, this sensor (generally
 Устройство, принцип действия машин для уборки картофеля
Устройство, принцип действия машин для уборки картофеля Совершенствование государственной политики в сфере дорожного хозяйства Кемеровской области
Совершенствование государственной политики в сфере дорожного хозяйства Кемеровской области 20180126_urok_literatury_v_9_klasse_liricheskiy_geroy_m.yu_.lermontova
20180126_urok_literatury_v_9_klasse_liricheskiy_geroy_m.yu_.lermontova Лабораторные шпатели виды, особенности, применение
Лабораторные шпатели виды, особенности, применение Біполярні транзистори
Біполярні транзистори 20140802_pero5_2
20140802_pero5_2 Аноректальные пороки развития
Аноректальные пороки развития Шаблон_Презентация
Шаблон_Презентация Компетентный PR
Компетентный PR Создание аксессуаров с использованием лоскутных техник
Создание аксессуаров с использованием лоскутных техник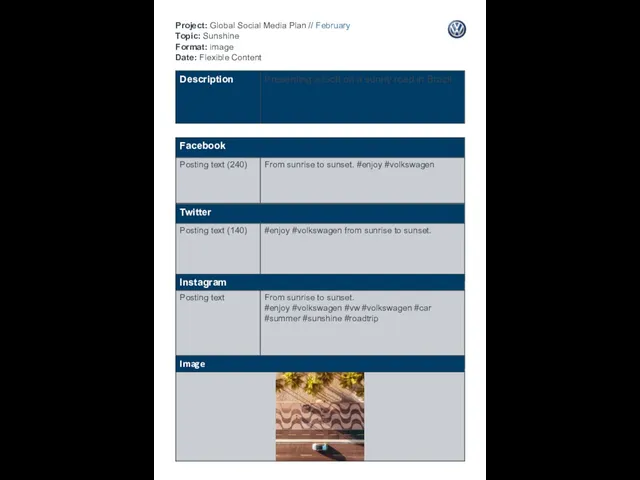 Global social media plan. Sunshine Format
Global social media plan. Sunshine Format Каналы. Водохранилища. Искусственные водоёмы
Каналы. Водохранилища. Искусственные водоёмы Devi̇r Logo
Devi̇r Logo 45646
45646 Проект территориального общественного самоуправления Малокисляйский. Детская игровая площадка Веселая полянка
Проект территориального общественного самоуправления Малокисляйский. Детская игровая площадка Веселая полянка Child Teenager Baby Young adult Middle-aged woman Senior citizen
Child Teenager Baby Young adult Middle-aged woman Senior citizen День здоровья в школе (фотографии)
День здоровья в школе (фотографии) Устройство, работа и ремонт индуктивного шунта ИШ 95
Устройство, работа и ремонт индуктивного шунта ИШ 95 Макет портфолио
Макет портфолио 20170117_gretsiya_i_kriti_v_epohu_bronzy
20170117_gretsiya_i_kriti_v_epohu_bronzy Гибкость, средства и методы развития
Гибкость, средства и методы развития ЛД 2.5.1 Можарова Вера
ЛД 2.5.1 Можарова Вера Zaschita
Zaschita Использование методов оценки при процедуре ОВОС
Использование методов оценки при процедуре ОВОС Визитная карточка школьнго музея
Визитная карточка школьнго музея Software computer. Choice of configuration computer
Software computer. Choice of configuration computer дыхание морских млекопитающих
дыхание морских млекопитающих Гидравлический домкрат в быту
Гидравлический домкрат в быту