- Автоматизоване керування мобільною роботехнічною платформою по заданій траєкторії

Содержание
- 2. Об’єкт дослідження – інтелектуальне управління мобільними платформами на виробництві. Мета роботи – розробка автоматизованої системи керування
- 3. Мобільний робот – робот, який здатен пересуватися у робочому просторі згідно з керуючою програмою. Особливість мобільних
- 4. Програмне забезпечення мобільних роботів
- 5. СЕРЕДОВИЩА ПРОГРАМУВАННЯ ARDUINO Programino (платна); B4R (Basic for Arduino) (використовується мова Basic); PlatformIO (орієнтована на роботу
- 6. Алгоритм ручного керування та код програми
- 7. Алгоритм руху по лінії
- 8. ПРОГРАМНА РЕАЛІЗАЦІЯ РЕГУЛЯТОРА З П-КАНАЛОМ ТА КУБІЧНОЮ СКЛАДОВОЮ П-канал діє коли відхилення від норми незначні. А
- 9. Алгоритм руху по лінії до точки 1 Алгоритм руху по лінії назад до точки старту
- 10. Функція руху Функція руху по лінії вперед і назад
- 11. Розробка ПІД-регулятора з кубічною складовою Рисунок - ПІД-регулятор ПІД-регулятором називають пристрій, який застосовується в контурах керування,
- 12. Керуючий сигнал ПІД-регулятора отримують в результаті складання 3 складових, а саме перша – пропорційна величині сигналу
- 13. Налаштування та використання Android-додатку В ході виконання розділу роботи було вирішено такі задачі: - керування мобільною
- 15. Скачать презентацию

Об’єкт дослідження – інтелектуальне управління мобільними платформами на виробництві.
Мета
Об’єкт дослідження – інтелектуальне управління мобільними платформами на виробництві.
Мета
Мобільний робот – робот, який здатен пересуватися у робочому просторі
Мобільний робот – робот, який здатен пересуватися у робочому просторі

Програмне забезпечення
мобільних роботів
Програмне забезпечення
мобільних роботів
СЕРЕДОВИЩА ПРОГРАМУВАННЯ
ARDUINO
Programino (платна);
B4R (Basic for Arduino) (використовується мова Basic);
PlatformIO (орієнтована на
СЕРЕДОВИЩА ПРОГРАМУВАННЯ
ARDUINO
Programino (платна);
B4R (Basic for Arduino) (використовується мова Basic);
PlatformIO (орієнтована на
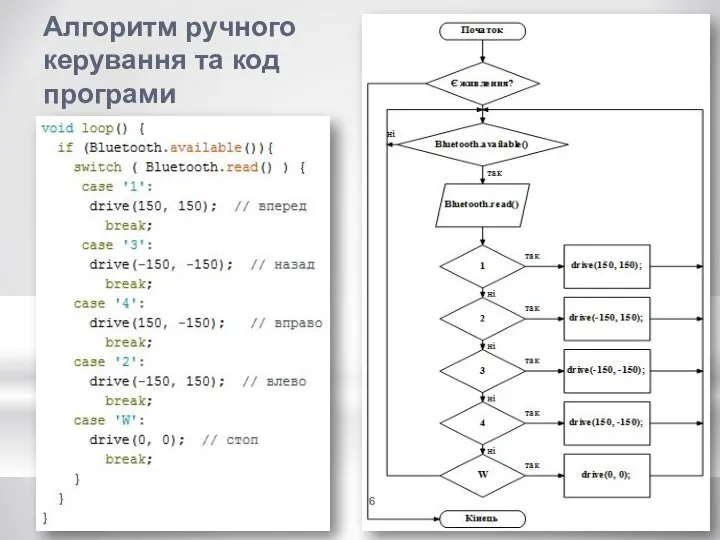
Алгоритм ручного керування та код програми
Алгоритм ручного керування та код програми
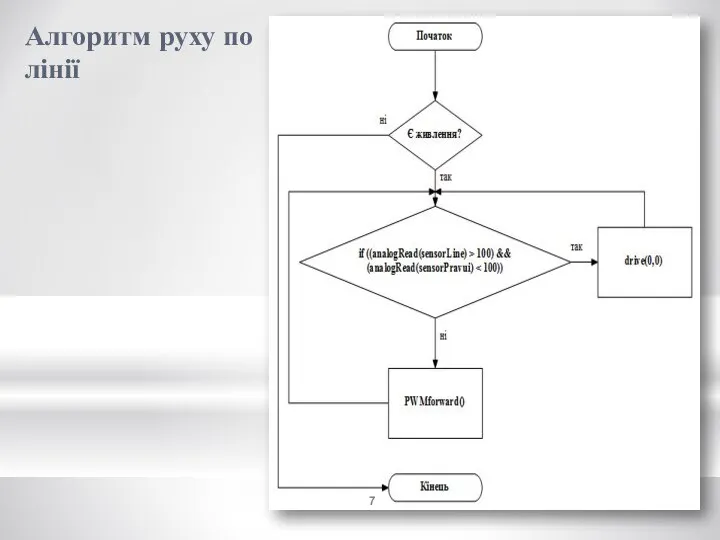
Алгоритм руху по лінії
Алгоритм руху по лінії

ПРОГРАМНА РЕАЛІЗАЦІЯ РЕГУЛЯТОРА З П-КАНАЛОМ ТА КУБІЧНОЮ СКЛАДОВОЮ
П-канал діє коли відхилення
ПРОГРАМНА РЕАЛІЗАЦІЯ РЕГУЛЯТОРА З П-КАНАЛОМ ТА КУБІЧНОЮ СКЛАДОВОЮ
П-канал діє коли відхилення

Алгоритм руху по лінії до точки 1
Алгоритм руху по лінії назад
Алгоритм руху по лінії до точки 1
Алгоритм руху по лінії назад
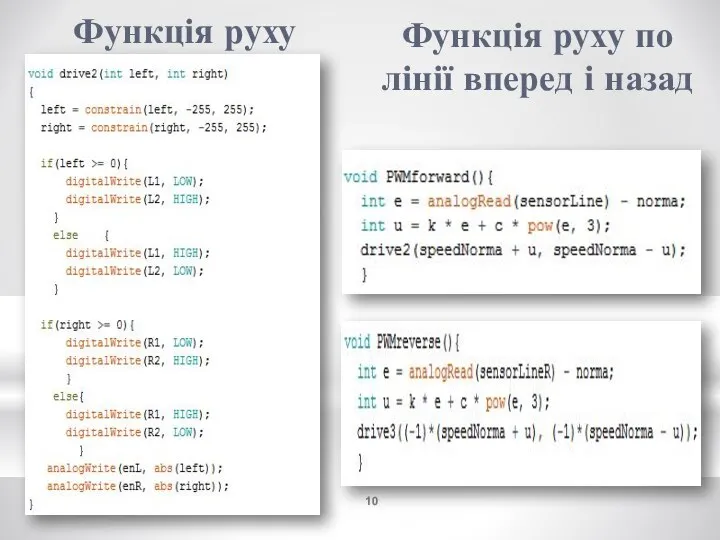
Функція руху
Функція руху по лінії вперед і назад
Функція руху
Функція руху по лінії вперед і назад

Розробка ПІД-регулятора з кубічною складовою
Рисунок - ПІД-регулятор
ПІД-регулятором називають пристрій, який застосовується
Розробка ПІД-регулятора з кубічною складовою
Рисунок - ПІД-регулятор
ПІД-регулятором називають пристрій, який застосовується
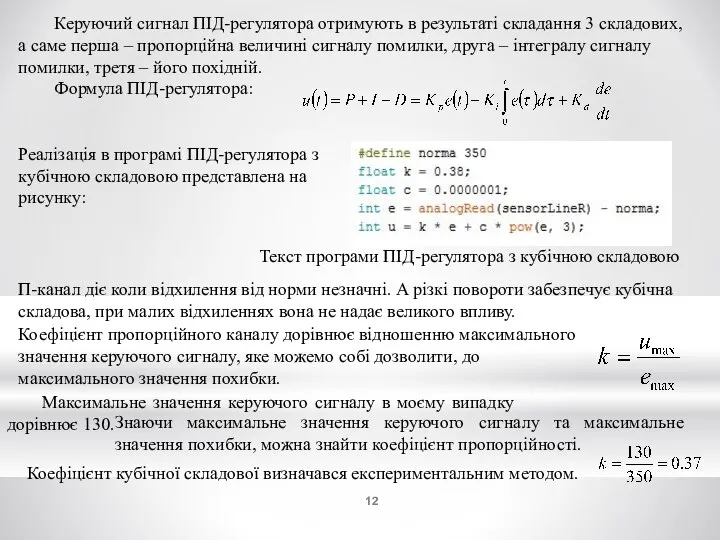
Керуючий сигнал ПІД-регулятора отримують в результаті складання 3 складових, а саме
Керуючий сигнал ПІД-регулятора отримують в результаті складання 3 складових, а саме
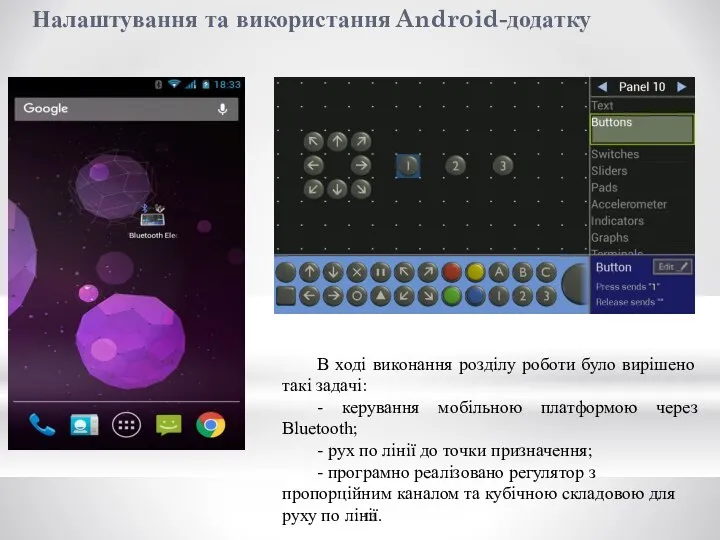
Налаштування та використання Android-додатку
В ході виконання розділу роботи було вирішено такі
Налаштування та використання Android-додатку
В ході виконання розділу роботи було вирішено такі
 Наладка шлифовального станка Gleason TAG 400 и обработка шестерни ведомой привода масляного насоса
Наладка шлифовального станка Gleason TAG 400 и обработка шестерни ведомой привода масляного насоса Путешествие по Петербургу
Путешествие по Петербургу VEDA MС или ВЕДА МК представляет…
VEDA MС или ВЕДА МК представляет… Блок 2. Сфера духовной культуры
Блок 2. Сфера духовной культуры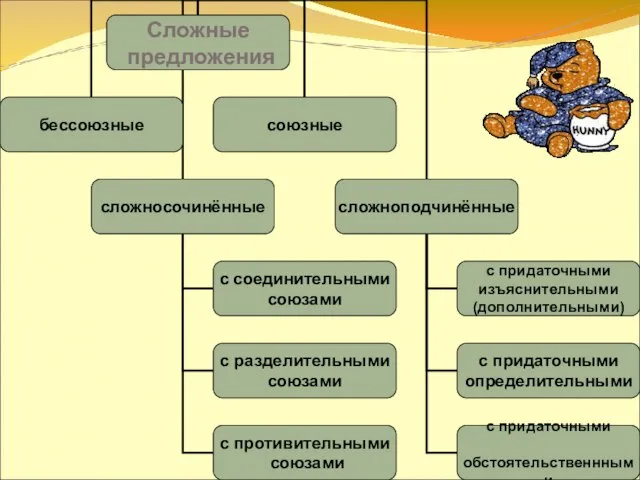 Сложные предложения
Сложные предложения 20121106_tri_tolstyaka
20121106_tri_tolstyaka Схемотехника комбинационных узлов
Схемотехника комбинационных узлов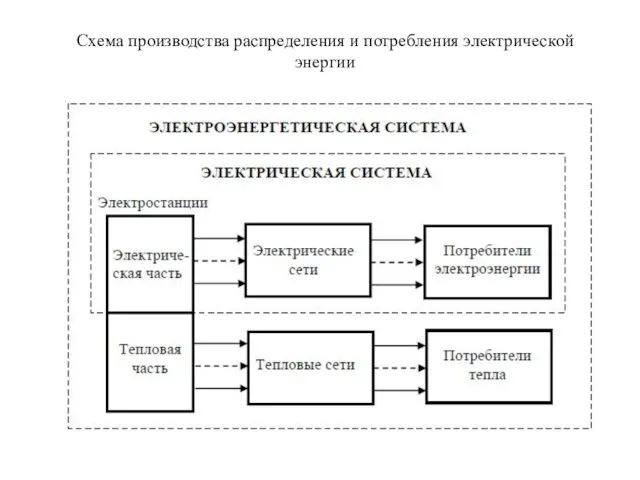 Схема производства распределения и потребления электрической энергии
Схема производства распределения и потребления электрической энергии Регистрация сим-карты самостоятельно
Регистрация сим-карты самостоятельно Техническая презентация блочной кустовой насосной станции БКНС 5а на базе электронасосных агрегатов с 180 м3/ч
Техническая презентация блочной кустовой насосной станции БКНС 5а на базе электронасосных агрегатов с 180 м3/ч 20161031_k_state
20161031_k_state Моя профессия – моя гордость!. Учитель
Моя профессия – моя гордость!. Учитель Сиань и Китай
Сиань и Китай Подъёмное устройство для автоматизации парковки в ограниченном пространстве
Подъёмное устройство для автоматизации парковки в ограниченном пространстве Исследование возможности применения добавок диатомита при производстве теплоизоляционного кирпича
Исследование возможности применения добавок диатомита при производстве теплоизоляционного кирпича 20140818_chto_takoe_khvoink_1i
20140818_chto_takoe_khvoink_1i Фортуна - инжиниринг
Фортуна - инжиниринг Пиление и разметка
Пиление и разметка Мама, бабушка и я
Мама, бабушка и я Электрическая цепь
Электрическая цепь Иске Масра авылы тарихы
Иске Масра авылы тарихы Моя компания. Резюме и описание фирмы. Услуги. Организационный план. Финансовый план. Риски и гарантии
Моя компания. Резюме и описание фирмы. Услуги. Организационный план. Финансовый план. Риски и гарантии Специально для группы Видео Киёми и Кацуки
Специально для группы Видео Киёми и Кацуки Переустройство и перепланировка жилого помещения
Переустройство и перепланировка жилого помещения Итоговый проект (3)
Итоговый проект (3) Строительные нормы и правила при проектировании инженерных систем
Строительные нормы и правила при проектировании инженерных систем Реализация проекта Формирование комфортной городской среды на территории муниципального образования Лисестровское
Реализация проекта Формирование комфортной городской среды на территории муниципального образования Лисестровское Подставка для цветов
Подставка для цветов