- Bino va inshootlar zilzilabardoshligi

Содержание
- 2. Reja 1. Bino va inshootlar zilzilabardoshligi fanining ahamiyati va usullari. 2. Bino va inshootlar zilzilabardoshligi fanining
- 3. Lecture 1 Topic: Introduction Plan 1. The importance and methods of the science of earthquake resistance
- 4. 1. Bino va inshootlar zilzilabardoshligi fanining ahamiyati va usullari Fanning o’qitishdan maqsad – inshoot va konstruktsiyalarda
- 5. Fanning vazifasi. . – inshoot va konstruktsiyalarda statik va dinamik kuchlar ta’siridan hosil bo’ladigan ichki zo’riqish
- 6. 1. Binolarni texnik baholashning vazifalari. . bino konstruktsiyalarining eskirishini belgilovchi omillar, jismoniy eskirishini aniqlash usullari; bino
- 7. ASOSIY ADABIYOTLAR 1. M.M. Mirsaidov, T.Z.Sultanov Inshootlar zilzilabardoshligi Toshkent, 2012. 2. B.C. Rahmonov, X.C. Saidov, E.M.
- 8. ASOSIY ADABIYOTLAR 7. М.Мартемьянов. Проектирование и строительства в сейсмических районах. М.: Стройиздат, 1985. -220 с. 8.
- 9. QUSHIMCHA ADABIYOTLAR 1. И.Л.Корчинский. Основы проектирование и строительства в сейсмических районах. М., Стройиздат, 1961. 2. Ҳобилов
- 10. QUSHIMCHA ADABIYOTLAR 6. Charles K. Erdey “Earthquake Engineering”: Application to Design. Copyright. 2007 John Wiley &
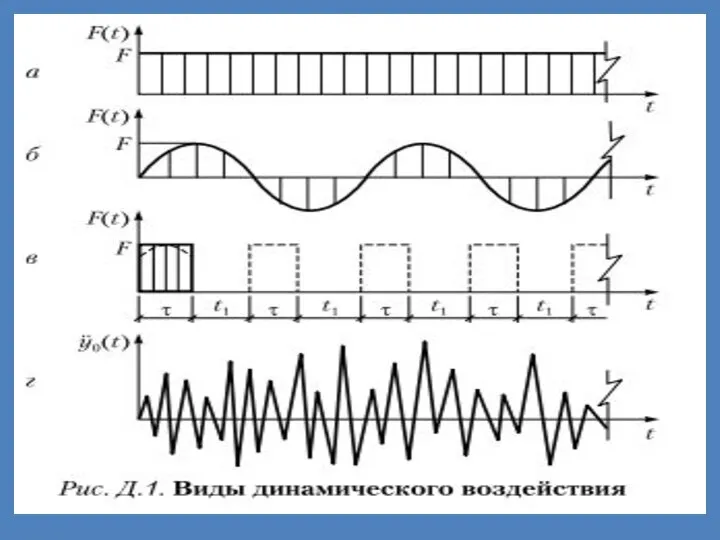
- 11. Inshoot massalarida tezlanish uyg‘otadigan kuchlar dinamik kuchlar deb ataladi. Inshoot qismlariga asta-sekin qo‘yiladigan kuchlar statik kuchlarni
- 12. Dinamik kuchlarning quyidagi turlari mavjud: 1. Qo‘zg‘alma davriy kuchlar. Bunday kuchlar inshootning biror yeriga o‘rnatilgan, aylanuvchi
- 13. 3. Qisqa muddat ta’sir etuvchi kuchlar (impulslar). Bunday kuchlar birdan paydo bo‘lib, birdan so‘nadi. Portlash natijasida
- 15. Seysmik kuchlar kattaligini to‘g‘ri aniqlay bilish inshootlarning seysmik mustaxkamligini ta’minlashda katta ahamiyatga ega. Dinamik kuchlar o‘z
- 16. 2-rasm. Davriy (a) va zarbiy (b) kuchlar
- 17. Tebranish turlari. Tebranish turlari benihoya ko‘p bo‘lib, inson yuragining urishi, o‘pkaning nafas olishi, sovuqdan qaltirash, yorug‘lik
- 18. Agar tebranayotgan sistema doim qo‘zg‘atuv- chi kuch ta’siri ostida bo‘lsa (1-rasm,a), siste-maning bunday tebranishi majburiy tebranish
- 19. Ma’lum vaqt ichida uzluksiz takrorlanib turadigan tebranishlar davriy tebranishlar deb ataladi. To‘la tebranish uchun ketgan vaqt
- 21. Ayrim masalalarni taqriban yechishda dissipativ kuchlar e’tiborga olinmaydi. Tebranishning bunday turi so‘nmaydigan erkin tebranish deb nom
- 22. Sistemaning erkinlik darajasi. Inshootlar statikasidagi kabi dinamikasida ham «sistema» deganda sterjenli sistemalar, ya’ni inshootlar tushuniladi. Dinamik
- 23. Sistema deformatsiyalanganda barcha massalarning holatini (o‘rnini) belgilovchi geometrik parametrlar soni sistemaning erkinlik darajasi deb ataladi. Vaznsiz
- 24. To‘planma (yig‘iq) massalar bikrligi cheksiz katta sterjen ustida joylashgan bo‘lsa, sistema-ning holati sterjenning holati bilan belgilanadi.
- 25. Shunday ekan, massalarning holatini belgi-lovchi parametrlar ham cheksiz ko‘p bo‘ladi. Shunga ko‘ra, gap xaqiqiy konstruksiyalar us-tida
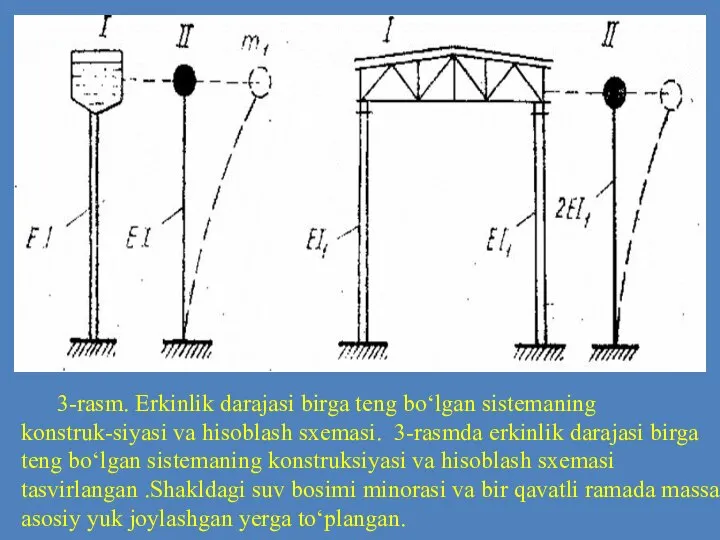
- 26. 3-rasm. Erkinlik darajasi birga teng bo‘lgan sistemaning konstruk-siyasi va hisoblash sxemasi. 3-rasmda erkinlik darajasi birga teng
- 27. Inshootlar dinamikasi masalalarini yechish usullari.In-shootlar dinamikasi masalalarini yechishda statik va energetik usuldan keng foydalaniladi. Statik usulning
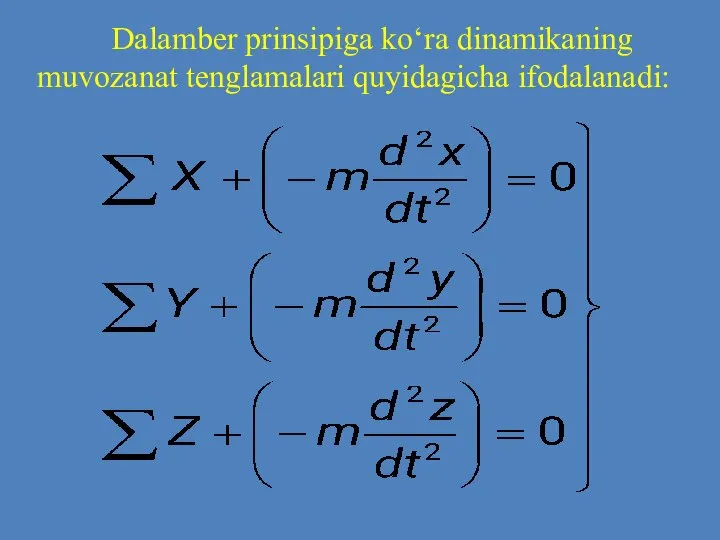
- 28. Dalamber prinsipiga ko‘ra dinamikaning muvozanat tenglamalari quyidagicha ifodalanadi:
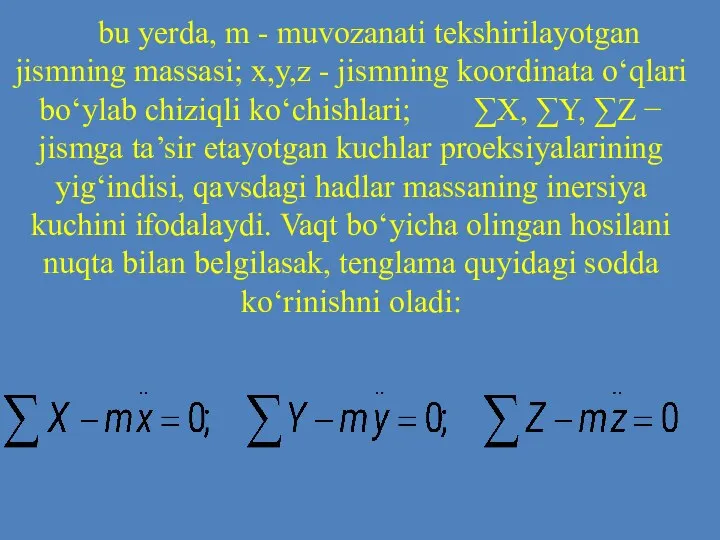
- 29. bu yerda, m - muvozanati tekshirilayotgan jismning massasi; x,y,z - jismning koordinata o‘qlari bo‘ylab chiziqli ko‘chishlari;
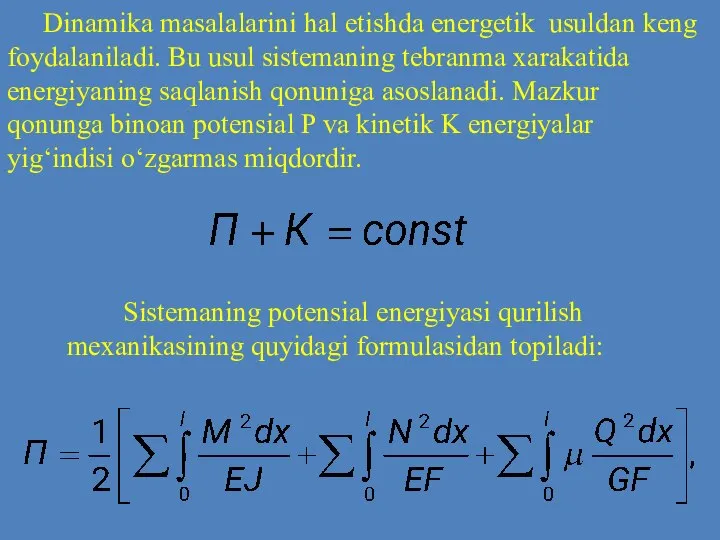
- 30. Dinamika masalalarini hal etishda energetik usuldan keng foydalaniladi. Bu usul sistemaning tebranma xarakatida energiyaning saqlanish qonuniga
- 31. bu yerda, M,N,Q - eguvchi moment, bo‘ylama va ko‘ndalang kuchlar; J,F - inersiya momenti va ko‘ndalang
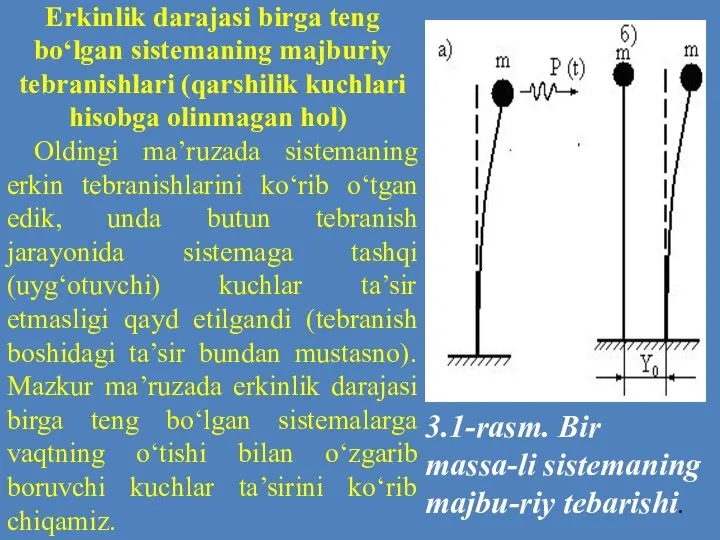
- 32. Erkinlik darajasi birga teng bo‘lgan sistemaning majburiy tebranishlari (qarshilik kuchlari hisobga olinmagan hol) Oldingi ma’ruzada sistemaning
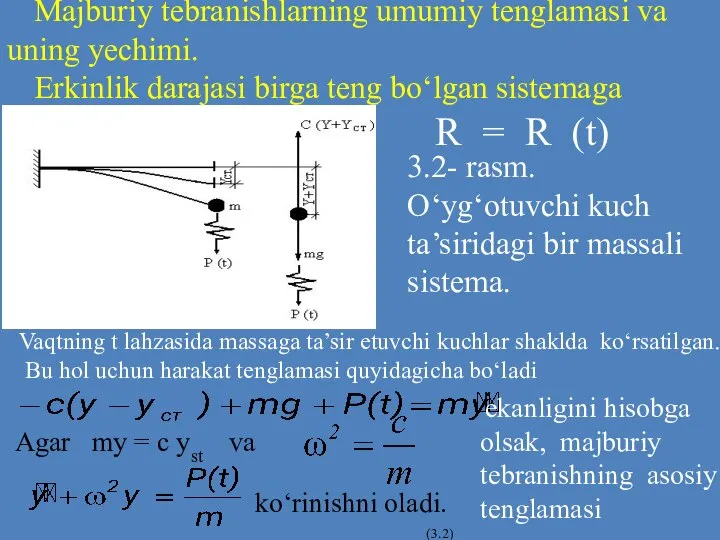
- 33. Majburiy tebranishlarning umumiy tenglamasi va uning yechimi. Erkinlik darajasi birga teng bo‘lgan sistemaga R = R
- 34. Bu usulga ko‘ra (3.2) tenglamaning xususiy yechimi (3.3) Buning uchun (3.3) dan vaqt bo‘yicha hosila olamiz.
- 35. Tezlanishni topamiz: (3.5) (3.3) va (3.5) ifodalarni (3.2) tenglamaga qo‘yib, yoqoridagi formulani hosil qilamiz. (3.6). (3.4)
- 36. ni topamiz. Bu yerda B1 va B2 boshlang‘ich shartlarga bog‘liq bo‘lgan doimiy sonlardir. Integrallash jarayonida o‘zgarib
- 37. Bundan hosila olib, tezlik tenglamasiga ega bo‘lamiz: (3.9) B1 va B2 doimiylarning qiymati harakat boshidagi shartlarga
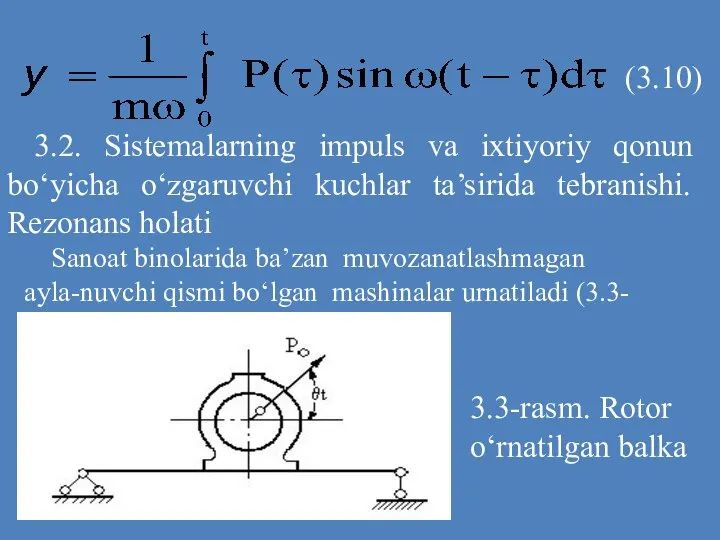
- 38. (3.10) 3.2. Sistemalarning impuls va ixtiyoriy qonun bo‘yicha o‘zgaruvchi kuchlar ta’sirida tebranishi. Rezonans holati Sanoat binolarida
- 39. Muvozanatlashmagan massaning o‘q atrofidan aylanishdan hosil bo‘lgan markazdan qochma kuchi R ta’sirida balka tebranadi. Bu kuchning
- 40. ω ≠ 0 hol uchun integralning yechimi bo‘ladi. Bu formulaga va belgilash kiritsak, (3.12) kelib chiqadi.
- 56. Скачать презентацию
Reja
1. Bino va inshootlar zilzilabardoshligi fanining ahamiyati va usullari.
2. Bino
Reja
1. Bino va inshootlar zilzilabardoshligi fanining ahamiyati va usullari.
2. Bino
Lecture 1 Topic: Introduction
Plan
1. The importance and methods of the
Lecture 1 Topic: Introduction
Plan
1. The importance and methods of the
1. Bino va inshootlar zilzilabardoshligi fanining ahamiyati va usullari
Fanning o’qitishdan maqsad
1. Bino va inshootlar zilzilabardoshligi fanining ahamiyati va usullari
Fanning o’qitishdan maqsad
Fanning vazifasi.
.
– inshoot va konstruktsiyalarda statik va dinamik kuchlar ta’siridan hosil
Fanning vazifasi.
.
– inshoot va konstruktsiyalarda statik va dinamik kuchlar ta’siridan hosil
1. Binolarni texnik baholashning vazifalari.
.
bino konstruktsiyalarining eskirishini belgilovchi omillar, jismoniy eskirishini
1. Binolarni texnik baholashning vazifalari.
.
bino konstruktsiyalarining eskirishini belgilovchi omillar, jismoniy eskirishini
ASOSIY ADABIYOTLAR
1. M.M. Mirsaidov, T.Z.Sultanov Inshootlar zilzilabardoshligi Toshkent, 2012.
2. B.C.
ASOSIY ADABIYOTLAR
1. M.M. Mirsaidov, T.Z.Sultanov Inshootlar zilzilabardoshligi Toshkent, 2012.
2. B.C.
ASOSIY ADABIYOTLAR
7. М.Мартемьянов. Проектирование и строительства в сейсмических районах. М.:
ASOSIY ADABIYOTLAR
7. М.Мартемьянов. Проектирование и строительства в сейсмических районах. М.:
QUSHIMCHA ADABIYOTLAR
1. И.Л.Корчинский. Основы проектирование и строительства в сейсмических районах. М.,
QUSHIMCHA ADABIYOTLAR
1. И.Л.Корчинский. Основы проектирование и строительства в сейсмических районах. М.,
QUSHIMCHA ADABIYOTLAR
6. Charles K. Erdey “Earthquake Engineering”: Application to Design. Copyright.
QUSHIMCHA ADABIYOTLAR
6. Charles K. Erdey “Earthquake Engineering”: Application to Design. Copyright.
Inshoot massalarida tezlanish uyg‘otadigan kuchlar dinamik kuchlar deb ataladi. Inshoot qismlariga
Inshoot massalarida tezlanish uyg‘otadigan kuchlar dinamik kuchlar deb ataladi. Inshoot qismlariga
Dinamik kuchlarning quyidagi turlari mavjud:
1. Qo‘zg‘alma davriy kuchlar. Bunday kuchlar inshootning
Dinamik kuchlarning quyidagi turlari mavjud:
1. Qo‘zg‘alma davriy kuchlar. Bunday kuchlar inshootning
3. Qisqa muddat ta’sir etuvchi kuchlar (impulslar). Bunday kuchlar birdan paydo
3. Qisqa muddat ta’sir etuvchi kuchlar (impulslar). Bunday kuchlar birdan paydo

Seysmik kuchlar kattaligini to‘g‘ri aniqlay bilish inshootlarning seysmik mustaxkamligini ta’minlashda katta
Seysmik kuchlar kattaligini to‘g‘ri aniqlay bilish inshootlarning seysmik mustaxkamligini ta’minlashda katta
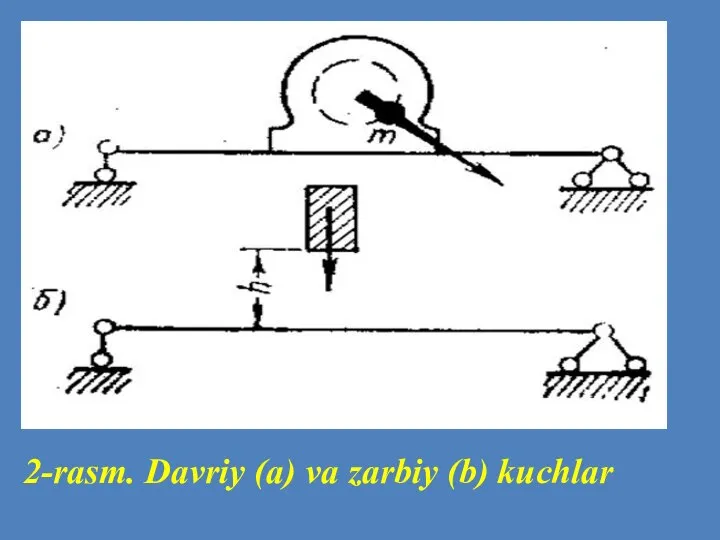
2-rasm. Davriy (a) va zarbiy (b) kuchlar
2-rasm. Davriy (a) va zarbiy (b) kuchlar
Tebranish turlari. Tebranish turlari benihoya ko‘p bo‘lib, inson yuragining urishi, o‘pkaning
Tebranish turlari. Tebranish turlari benihoya ko‘p bo‘lib, inson yuragining urishi, o‘pkaning
Agar tebranayotgan sistema doim qo‘zg‘atuv-
chi kuch ta’siri ostida bo‘lsa (1-rasm,a), siste-maning
Agar tebranayotgan sistema doim qo‘zg‘atuv-
chi kuch ta’siri ostida bo‘lsa (1-rasm,a), siste-maning
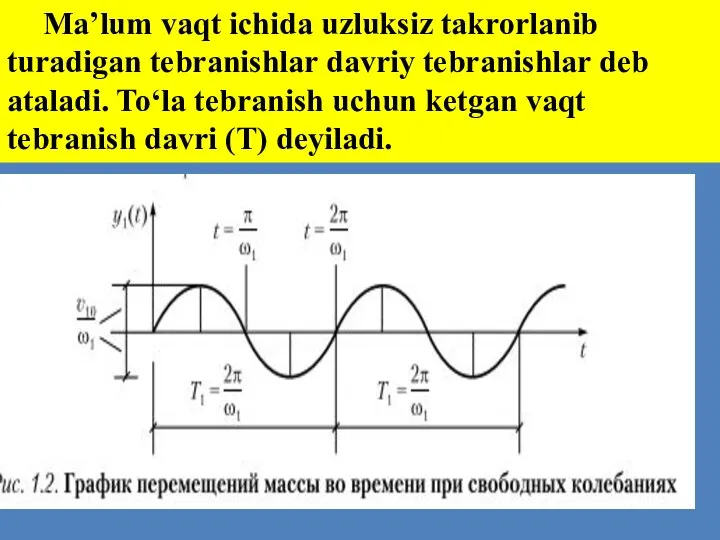
Ma’lum vaqt ichida uzluksiz takrorlanib turadigan tebranishlar davriy tebranishlar deb ataladi.
Ma’lum vaqt ichida uzluksiz takrorlanib turadigan tebranishlar davriy tebranishlar deb ataladi.
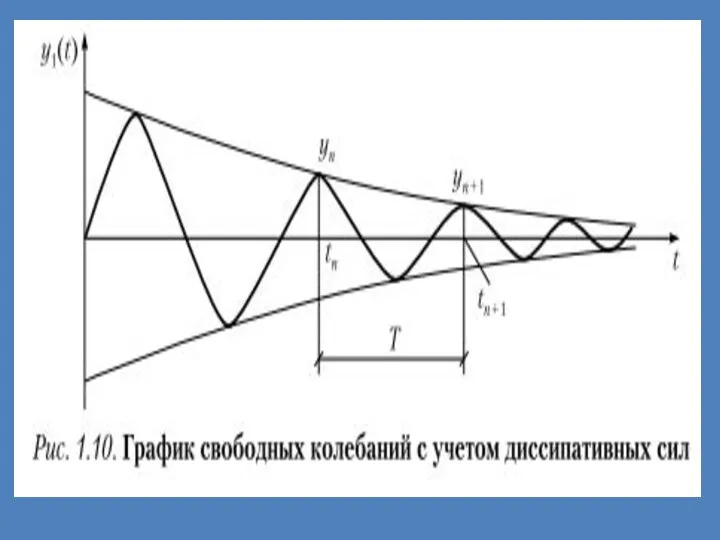
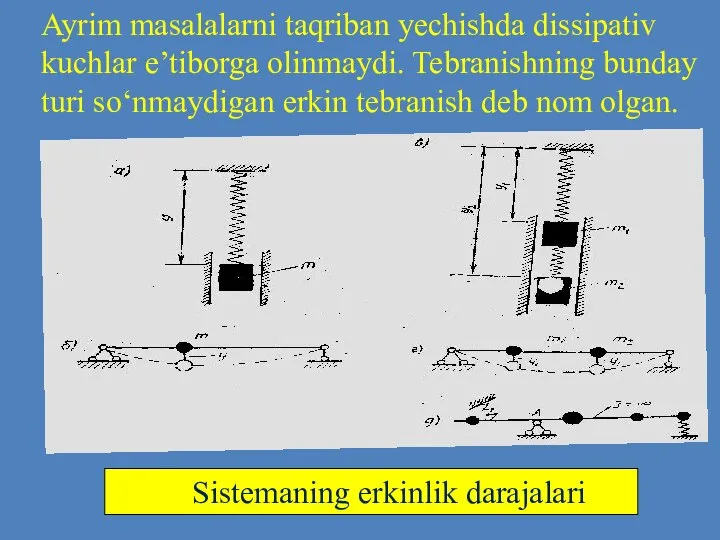
Ayrim masalalarni taqriban yechishda dissipativ
kuchlar e’tiborga olinmaydi. Tebranishning bunday
turi
Ayrim masalalarni taqriban yechishda dissipativ
kuchlar e’tiborga olinmaydi. Tebranishning bunday
turi
Sistemaning erkinlik darajasi. Inshootlar statikasidagi kabi dinamikasida ham «sistema» deganda sterjenli
Sistemaning erkinlik darajasi. Inshootlar statikasidagi kabi dinamikasida ham «sistema» deganda sterjenli
Sistema deformatsiyalanganda barcha massalarning holatini (o‘rnini) belgilovchi geometrik parametrlar soni sistemaning
Sistema deformatsiyalanganda barcha massalarning holatini (o‘rnini) belgilovchi geometrik parametrlar soni sistemaning
To‘planma (yig‘iq) massalar bikrligi cheksiz katta sterjen ustida joylashgan bo‘lsa, sistema-ning
To‘planma (yig‘iq) massalar bikrligi cheksiz katta sterjen ustida joylashgan bo‘lsa, sistema-ning
Shunday ekan, massalarning holatini belgi-lovchi parametrlar ham cheksiz ko‘p bo‘ladi. Shunga
Shunday ekan, massalarning holatini belgi-lovchi parametrlar ham cheksiz ko‘p bo‘ladi. Shunga
3-rasm. Erkinlik darajasi birga teng bo‘lgan sistemaning konstruk-siyasi va hisoblash sxemasi.
3-rasm. Erkinlik darajasi birga teng bo‘lgan sistemaning konstruk-siyasi va hisoblash sxemasi.
Inshootlar dinamikasi masalalarini yechish usullari.In-shootlar dinamikasi masalalarini yechishda statik va energetik
Inshootlar dinamikasi masalalarini yechish usullari.In-shootlar dinamikasi masalalarini yechishda statik va energetik
Dalamber prinsipiga ko‘ra dinamikaning muvozanat tenglamalari quyidagicha ifodalanadi:
Dalamber prinsipiga ko‘ra dinamikaning muvozanat tenglamalari quyidagicha ifodalanadi:
bu yerda, m - muvozanati tekshirilayotgan jismning massasi; x,y,z - jismning
bu yerda, m - muvozanati tekshirilayotgan jismning massasi; x,y,z - jismning
Dinamika masalalarini hal etishda energetik usuldan keng foydalaniladi. Bu usul sistemaning
Dinamika masalalarini hal etishda energetik usuldan keng foydalaniladi. Bu usul sistemaning
bu yerda, M,N,Q - eguvchi moment, bo‘ylama va ko‘ndalang kuchlar; J,F
bu yerda, M,N,Q - eguvchi moment, bo‘ylama va ko‘ndalang kuchlar; J,F
Erkinlik darajasi birga teng bo‘lgan sistemaning majburiy tebranishlari (qarshilik kuchlari hisobga
Erkinlik darajasi birga teng bo‘lgan sistemaning majburiy tebranishlari (qarshilik kuchlari hisobga
Majburiy tebranishlarning umumiy tenglamasi va uning yechimi.
Erkinlik darajasi birga teng
Majburiy tebranishlarning umumiy tenglamasi va uning yechimi.
Erkinlik darajasi birga teng
Bu usulga ko‘ra (3.2) tenglamaning xususiy yechimi
(3.3)
Buning uchun (3.3) dan vaqt
Bu usulga ko‘ra (3.2) tenglamaning xususiy yechimi
(3.3)
Buning uchun (3.3) dan vaqt
Tezlanishni topamiz:
(3.5)
(3.3) va (3.5) ifodalarni (3.2) tenglamaga qo‘yib,
yoqoridagi formulani hosil qilamiz.
Tezlanishni topamiz:
(3.5)
(3.3) va (3.5) ifodalarni (3.2) tenglamaga qo‘yib,
yoqoridagi formulani hosil qilamiz.
ni topamiz. Bu yerda B1 va B2 boshlang‘ich shartlarga bog‘liq bo‘lgan
ni topamiz. Bu yerda B1 va B2 boshlang‘ich shartlarga bog‘liq bo‘lgan
Bundan hosila olib, tezlik tenglamasiga ega bo‘lamiz:
(3.9)
B1 va B2 doimiylarning qiymati
Bundan hosila olib, tezlik tenglamasiga ega bo‘lamiz:
(3.9)
B1 va B2 doimiylarning qiymati
(3.10)
3.2. Sistemalarning impuls va ixtiyoriy qonun bo‘yicha o‘zgaruvchi kuchlar ta’sirida tebranishi.
(3.10)
3.2. Sistemalarning impuls va ixtiyoriy qonun bo‘yicha o‘zgaruvchi kuchlar ta’sirida tebranishi.
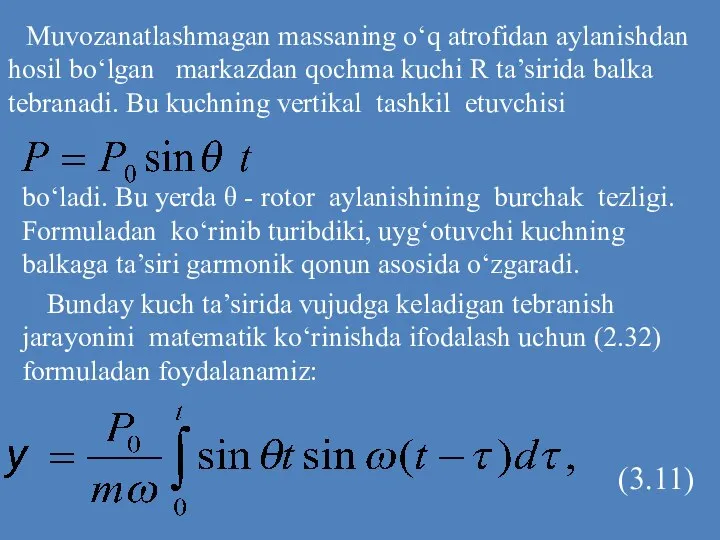
Muvozanatlashmagan massaning o‘q atrofidan aylanishdan hosil bo‘lgan markazdan qochma kuchi R
Muvozanatlashmagan massaning o‘q atrofidan aylanishdan hosil bo‘lgan markazdan qochma kuchi R
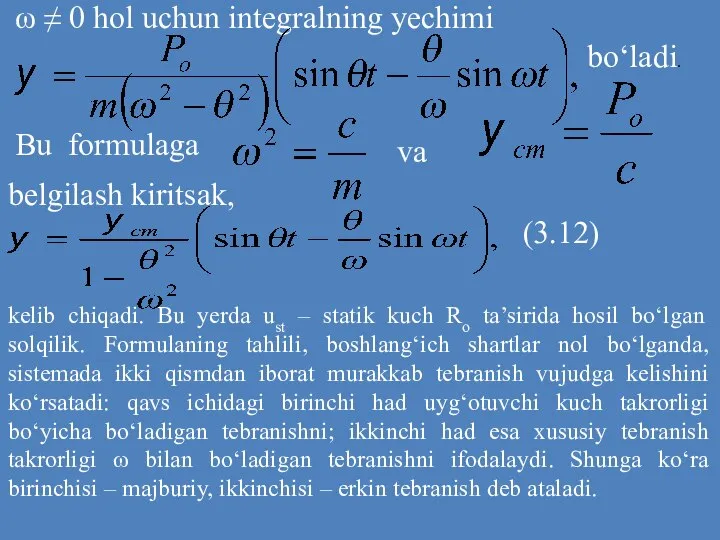
ω ≠ 0 hol uchun integralning yechimi
bo‘ladi.
Bu formulaga
va
belgilash kiritsak,
(3.12)
kelib
ω ≠ 0 hol uchun integralning yechimi
bo‘ladi.
Bu formulaga
va
belgilash kiritsak,
(3.12)
kelib














 20121210_socialnaya_sreda_podrostka
20121210_socialnaya_sreda_podrostka 20130708_blic-opros_po_biografii_i._bunina
20130708_blic-opros_po_biografii_i._bunina Мечеть Кааба в Мекке
Мечеть Кааба в Мекке Schokoladefondue
Schokoladefondue Шлифовальные станки
Шлифовальные станки Вклад советских немцев
Вклад советских немцев Тема =Начать при получении письма=
Тема =Начать при получении письма= Производство электроэнергии в России
Производство электроэнергии в России Контактная подвеска на основе поддерживающих конструкций из алюминиевых сплавов
Контактная подвеска на основе поддерживающих конструкций из алюминиевых сплавов OSNOVY_PROEKTIROVANIYa_SChM
OSNOVY_PROEKTIROVANIYa_SChM 20171114_5
20171114_5 К нам весна пришла опять!
К нам весна пришла опять! Қосалқы станцияларда асқын кернеуден қорғаныстың қазiргi әдiстерiн зерттеу
Қосалқы станцияларда асқын кернеуден қорғаныстың қазiргi әдiстерiн зерттеу Металлические конструкции. Изготовление стали, свойства, классификация. (Лекция 3)
Металлические конструкции. Изготовление стали, свойства, классификация. (Лекция 3) Симфонический оркестр КНИГА
Симфонический оркестр КНИГА презентация Хабибуллин Д
презентация Хабибуллин Д 8, характ.усилит. ОС
8, характ.усилит. ОС Фальцеосадочная машина F 300-2 PLUS
Фальцеосадочная машина F 300-2 PLUS Анализ и моделирование процессов самоорганизации для автоматизированного управления нефтегазодобычей
Анализ и моделирование процессов самоорганизации для автоматизированного управления нефтегазодобычей Анализ рационализаторской деятельности ПАО ИНТЕРПАЙП НТЗ за 5 мес. 2015
Анализ рационализаторской деятельности ПАО ИНТЕРПАЙП НТЗ за 5 мес. 2015 Оборудование и оснастка. Сборочно-сварочные приспособления
Оборудование и оснастка. Сборочно-сварочные приспособления G-Common-Law-Court-22nd-September-2019
G-Common-Law-Court-22nd-September-2019 Схема проезда в склад
Схема проезда в склад 20180604_prezentatsiya_rytsarskiy_turnir
20180604_prezentatsiya_rytsarskiy_turnir Давайте познакомимся
Давайте познакомимся Подводные технические средства: основные составляющие
Подводные технические средства: основные составляющие Электроизмерительные приборы
Электроизмерительные приборы Дизайн среды
Дизайн среды