Динамическое проектирование систем стабилизации летательных аппаратов. База систем стабилизации. Измерительные устройства
- Динамическое проектирование систем стабилизации летательных аппаратов. База систем стабилизации. Измерительные устройства

Содержание
- 2. ЭЛЕМЕНТЫ СИСТЕМ СТАБИЛИЗАЦИИ Измерительные устройства Усилительно-преобразующие и логико-вычислительные устройства Исполнительные устройства
- 3. ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
- 4. КЛАССИФИКАЦИЯ Измерители параметров углового движения (вокруг ЦМ): ϑ (ϑ,γ,ψ) ω ε α, β Измерители параметров движения
- 5. СТРУКТУРНАЯ СХЕМА ИЗМЕРИТЕЛЯ
- 6. ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЕЙ Динамическая характеристика: W(p)=M(p)/N(p) Статическая характеристика: U/ϕ=K
- 7. ПОГРЕШНОСТИ ИЗМЕРИТЕЛЕЙ
- 8. ОБЩЕТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ Интерфейсы: электрический, информационный, механический Масса и размеры Надежность Устойчивость к внешним воздействиям (соответствие стандартам)
- 9. ИЗМЕРИТЕЛИ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОКРУГ ЦЕНТРА МАСС Свойства гироскопа ω≠0 → Мг = H x ω =
- 10. СВОБОДНЫЙ ГИРОСКОП – ИЗМЕРИТЕЛЬ УГЛА 1 — ротор; 2, 3 — внутреннее и наружное кардановы кольца;
- 11. ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП
- 12. ДИФФЕРЕНЦИРУЮЩИЙ ГИРОСКОП (ДГ, ДУС) 1 - ротор; 2 - карданово кольцо; 3 - пружина; 4 -
- 13. ПОПЛАВКОВЫЙ ДГ
- 14. МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП
- 15. КОНСТРУКЦИЯ ММГ
- 16. ВНЕШНИЙ ВИД ММГ
- 17. ЛАЗЕРНЫЙ (ВОЛОКОННООПТИЧЕСКИЙ) ГИРОСКОП
- 18. ВИДЫ ЛГ ВОГ ЛГ
- 19. НЕКОТОРЫЕ ВИДЫ ПОГРЕШНОСТИ ЛГ
- 20. ИНТЕГРИРУЮЩИЙ ГИРОСКОП – ИЗМЕРИТЕЛЬ СКОРОСТИ И УСКОРЕНИЯ При добавлении ОС: а — упрощенная принципиальная; б —
- 21. ИЗМЕРИТЕЛЬ УГЛОВЫХ УСКОРЕНИЙ
- 22. ДАТЧИКИ УГЛА АТАКИ И СКОЛЬЖЕНИЯ
- 23. ИЗМЕРИТЕЛИ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕНТРА МАСС Датчик линейных ускорений
- 24. МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР
- 25. УГЛОВОЙ АКСЕЛЕРОМЕТР
- 26. ИЗМЕРИТЕЛИ СКОРОСТНОГО НАПОРА, ВОЗДУШНОЙ СКОРОСТИ
- 27. ИЗМЕРЕНИЕ ВЫСОТЫ
- 28. БАРОМЕТРИЧЕСКИЙ ВЫСОТОМЕР
- 29. ХАРАКТЕРИСТИКИ АТМОСФЕРЫ
- 30. РАДИОВЫСОТОМЕРЫ
- 32. Скачать презентацию

ЭЛЕМЕНТЫ СИСТЕМ СТАБИЛИЗАЦИИ
Измерительные устройства
Усилительно-преобразующие и логико-вычислительные устройства
Исполнительные устройства
ЭЛЕМЕНТЫ СИСТЕМ СТАБИЛИЗАЦИИ
Измерительные устройства
Усилительно-преобразующие и логико-вычислительные устройства
Исполнительные устройства
ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
КЛАССИФИКАЦИЯ
Измерители параметров углового движения (вокруг ЦМ):
ϑ (ϑ,γ,ψ)
ω
ε
α,
КЛАССИФИКАЦИЯ
Измерители параметров углового движения (вокруг ЦМ):
ϑ (ϑ,γ,ψ)
ω
ε
α,
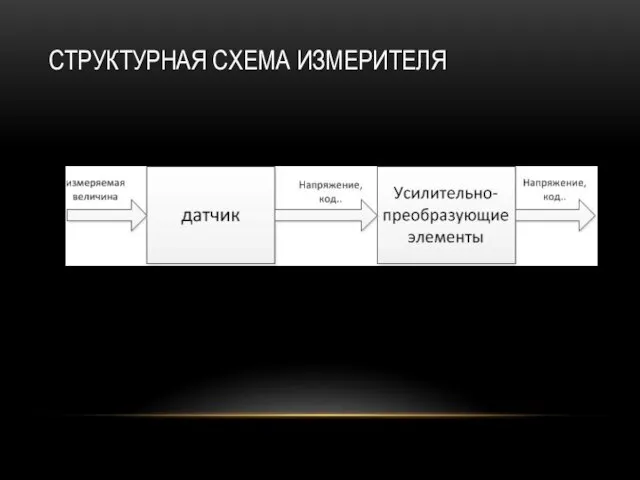
СТРУКТУРНАЯ СХЕМА ИЗМЕРИТЕЛЯ
СТРУКТУРНАЯ СХЕМА ИЗМЕРИТЕЛЯ
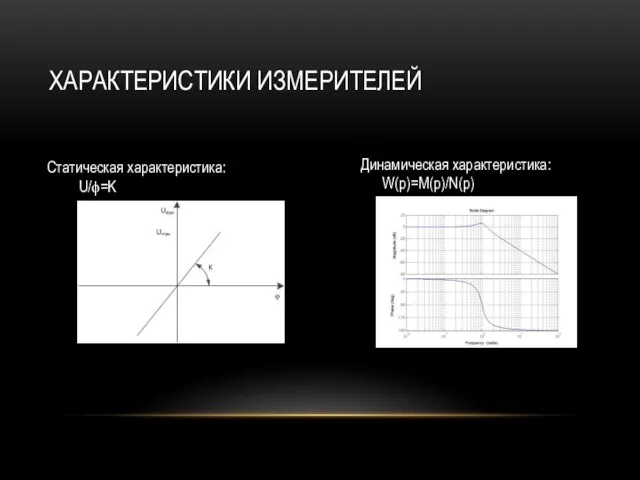
ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЕЙ
Динамическая характеристика:
W(p)=M(p)/N(p)
Статическая характеристика:
U/ϕ=K
ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЕЙ
Динамическая характеристика:
W(p)=M(p)/N(p)
Статическая характеристика:
U/ϕ=K

ПОГРЕШНОСТИ ИЗМЕРИТЕЛЕЙ
ПОГРЕШНОСТИ ИЗМЕРИТЕЛЕЙ
ОБЩЕТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Интерфейсы: электрический, информационный, механический
Масса и размеры
Надежность
Устойчивость к внешним воздействиям
ОБЩЕТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Интерфейсы: электрический, информационный, механический
Масса и размеры
Надежность
Устойчивость к внешним воздействиям
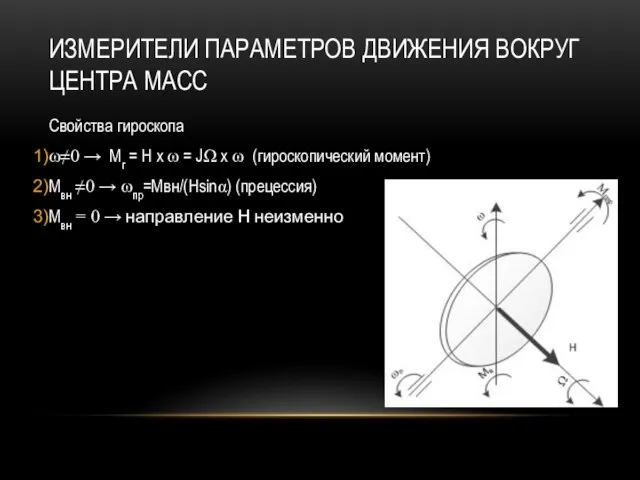
ИЗМЕРИТЕЛИ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОКРУГ ЦЕНТРА МАСС
Свойства гироскопа
ω≠0 → Мг = H
ИЗМЕРИТЕЛИ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОКРУГ ЦЕНТРА МАСС
Свойства гироскопа
ω≠0 → Мг = H

СВОБОДНЫЙ ГИРОСКОП – ИЗМЕРИТЕЛЬ УГЛА
1 — ротор; 2, 3 —
СВОБОДНЫЙ ГИРОСКОП – ИЗМЕРИТЕЛЬ УГЛА
1 — ротор; 2, 3 —
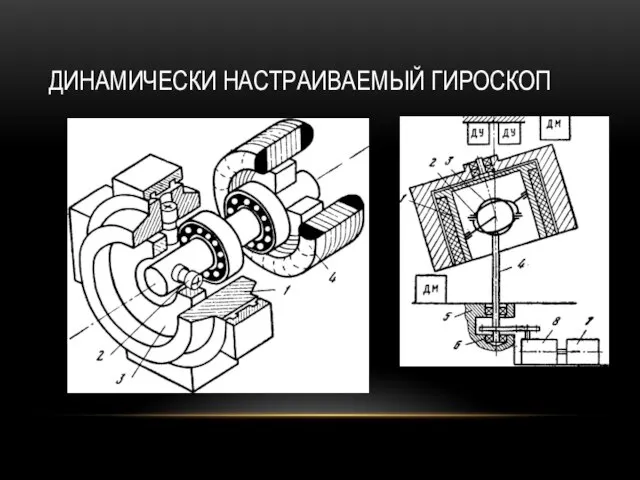
ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП
ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП
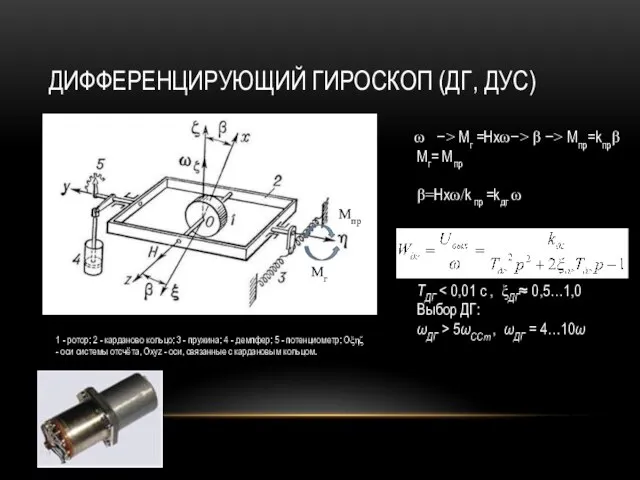
ДИФФЕРЕНЦИРУЮЩИЙ ГИРОСКОП (ДГ, ДУС)
1 - ротор; 2 - карданово кольцо; 3
ДИФФЕРЕНЦИРУЮЩИЙ ГИРОСКОП (ДГ, ДУС)
1 - ротор; 2 - карданово кольцо; 3

ПОПЛАВКОВЫЙ ДГ
ПОПЛАВКОВЫЙ ДГ
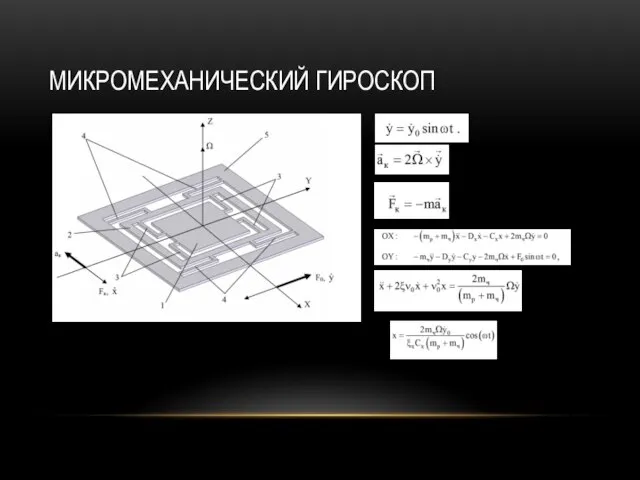
МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП
МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП

КОНСТРУКЦИЯ ММГ
КОНСТРУКЦИЯ ММГ
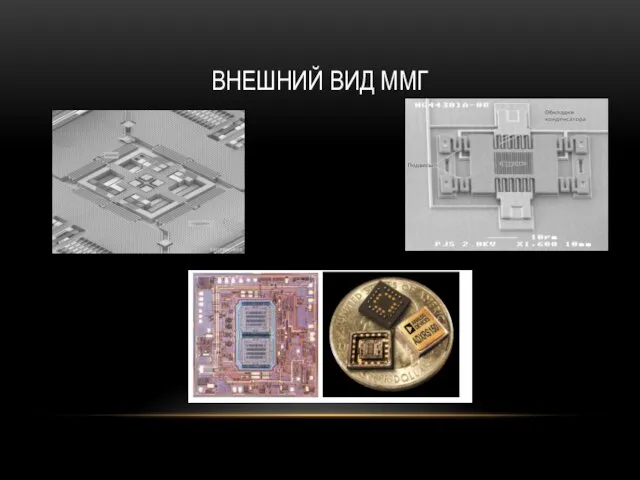
ВНЕШНИЙ ВИД ММГ
ВНЕШНИЙ ВИД ММГ

ЛАЗЕРНЫЙ (ВОЛОКОННООПТИЧЕСКИЙ) ГИРОСКОП
ЛАЗЕРНЫЙ (ВОЛОКОННООПТИЧЕСКИЙ) ГИРОСКОП
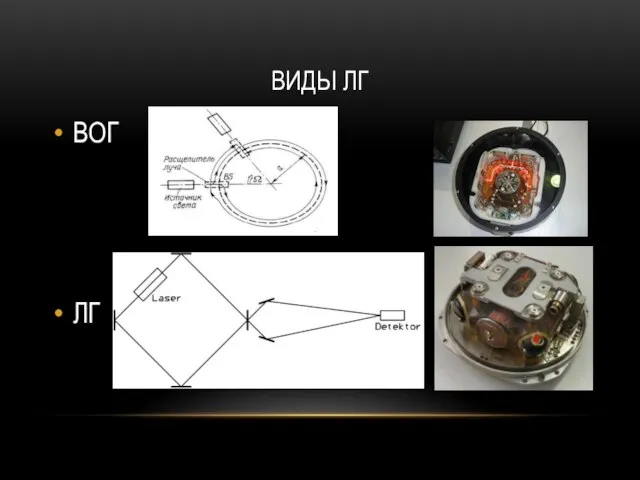
ВИДЫ ЛГ
ВОГ
ЛГ
ВИДЫ ЛГ
ВОГ
ЛГ

НЕКОТОРЫЕ ВИДЫ ПОГРЕШНОСТИ ЛГ
НЕКОТОРЫЕ ВИДЫ ПОГРЕШНОСТИ ЛГ
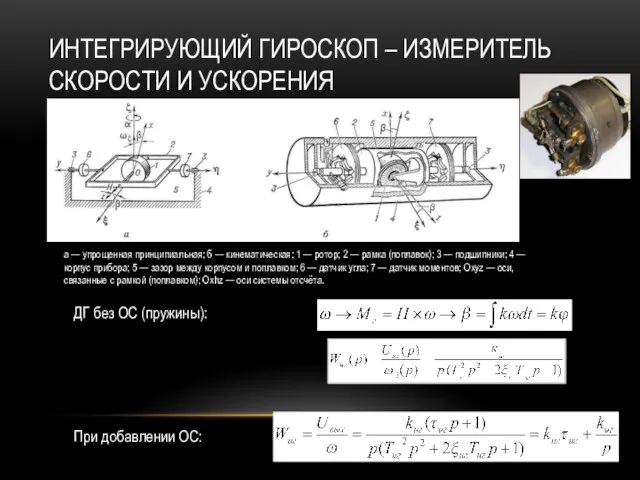
ИНТЕГРИРУЮЩИЙ ГИРОСКОП – ИЗМЕРИТЕЛЬ СКОРОСТИ И УСКОРЕНИЯ
При добавлении ОС:
а — упрощенная
ИНТЕГРИРУЮЩИЙ ГИРОСКОП – ИЗМЕРИТЕЛЬ СКОРОСТИ И УСКОРЕНИЯ
При добавлении ОС:
а — упрощенная
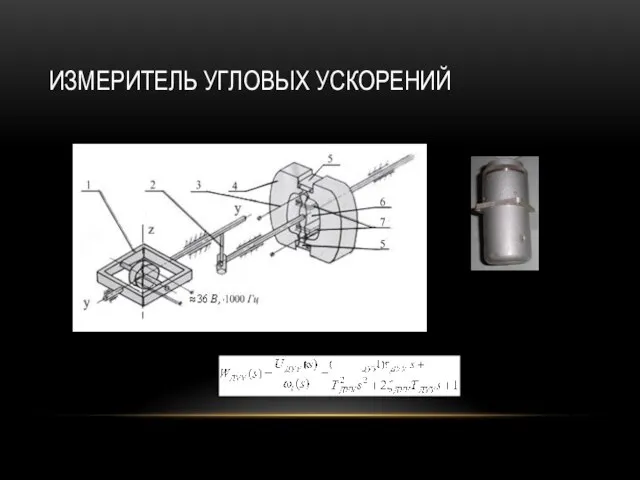
ИЗМЕРИТЕЛЬ УГЛОВЫХ УСКОРЕНИЙ
ИЗМЕРИТЕЛЬ УГЛОВЫХ УСКОРЕНИЙ
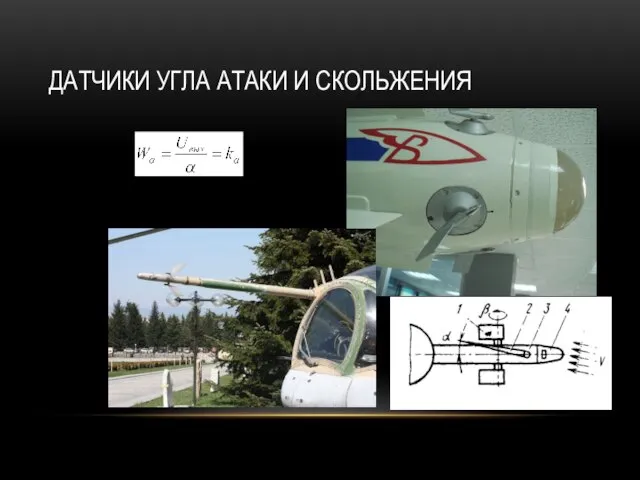
ДАТЧИКИ УГЛА АТАКИ И СКОЛЬЖЕНИЯ
ДАТЧИКИ УГЛА АТАКИ И СКОЛЬЖЕНИЯ
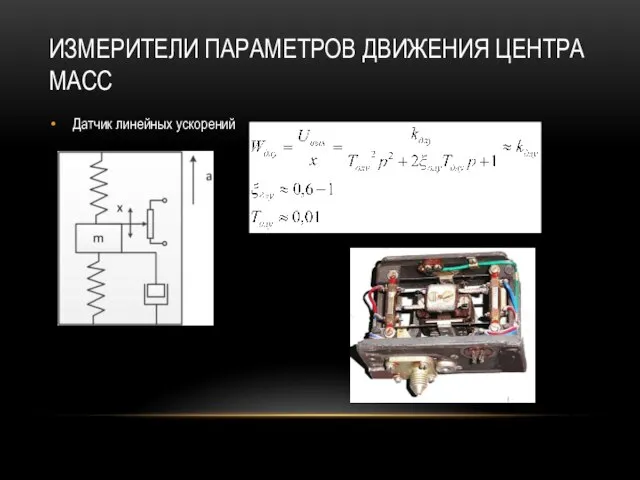
ИЗМЕРИТЕЛИ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕНТРА МАСС
Датчик линейных ускорений
ИЗМЕРИТЕЛИ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕНТРА МАСС
Датчик линейных ускорений

МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР
МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР

УГЛОВОЙ АКСЕЛЕРОМЕТР
УГЛОВОЙ АКСЕЛЕРОМЕТР

ИЗМЕРИТЕЛИ СКОРОСТНОГО НАПОРА, ВОЗДУШНОЙ СКОРОСТИ
ИЗМЕРИТЕЛИ СКОРОСТНОГО НАПОРА, ВОЗДУШНОЙ СКОРОСТИ
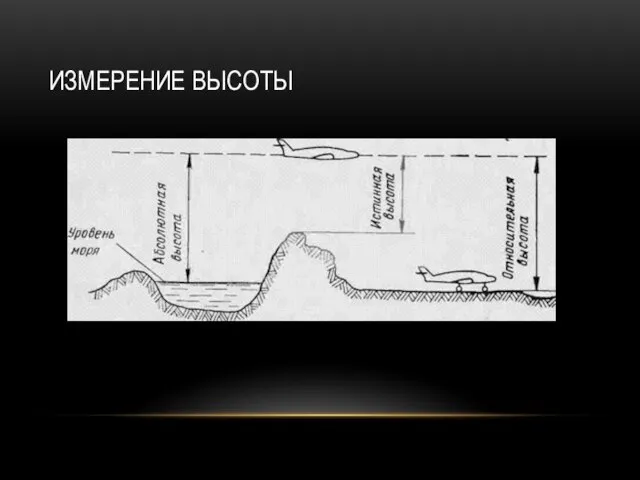
ИЗМЕРЕНИЕ ВЫСОТЫ
ИЗМЕРЕНИЕ ВЫСОТЫ
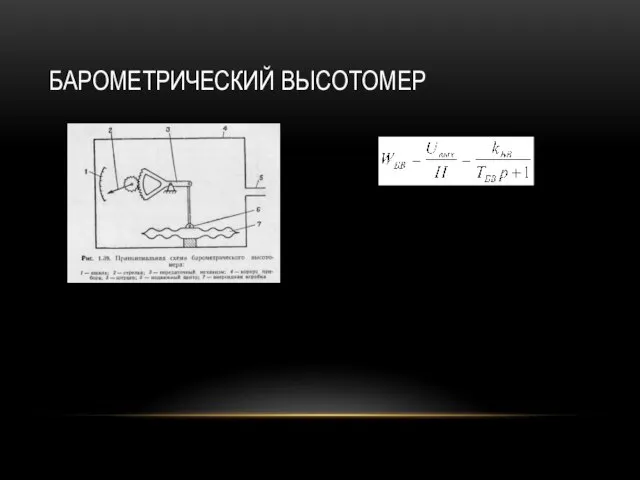
БАРОМЕТРИЧЕСКИЙ ВЫСОТОМЕР
БАРОМЕТРИЧЕСКИЙ ВЫСОТОМЕР
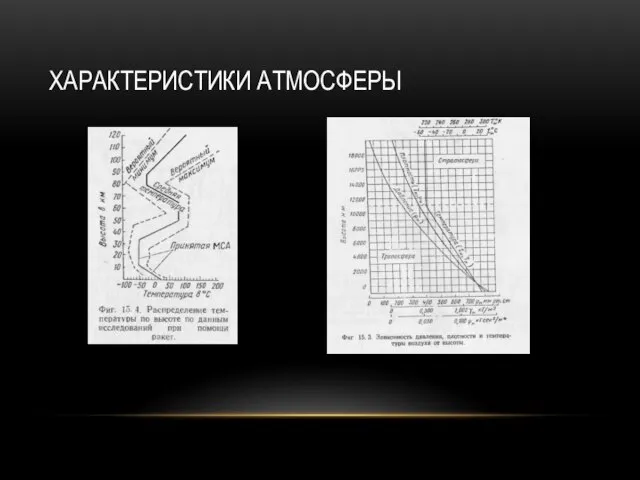
ХАРАКТЕРИСТИКИ АТМОСФЕРЫ
ХАРАКТЕРИСТИКИ АТМОСФЕРЫ
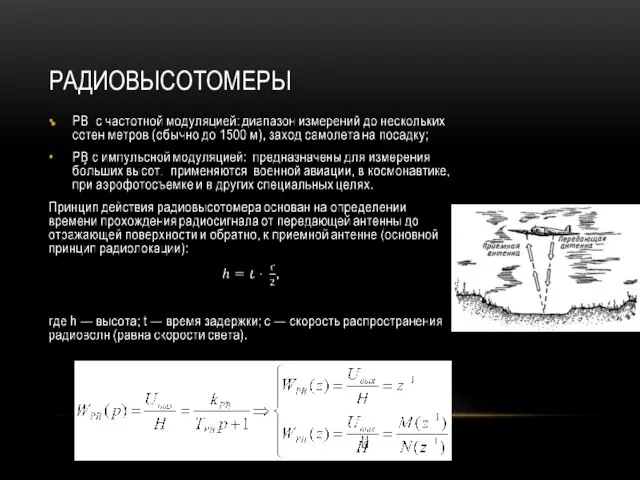
РАДИОВЫСОТОМЕРЫ
РАДИОВЫСОТОМЕРЫ
 Презентация БАС Fantom - 2022
Презентация БАС Fantom - 2022 Lean-case summary. Storybook
Lean-case summary. Storybook Электродвигатель компрессора НБ-231М
Электродвигатель компрессора НБ-231М Перекрестки
Перекрестки Кайзен – бережливое производство для всех
Кайзен – бережливое производство для всех National features of the Russian people
National features of the Russian people Продукты природного преобразования нефти. Методы исследования нефти
Продукты природного преобразования нефти. Методы исследования нефти Оборудование
Оборудование LR2_MSSiKK_2022_2
LR2_MSSiKK_2022_2 Основні технологічні процеси очистки води
Основні технологічні процеси очистки води Фоновая анимация
Фоновая анимация Токарные станки
Токарные станки Сергей Образцов
Сергей Образцов 20131212_prezentatsiya_10
20131212_prezentatsiya_10 СДС
СДС Нормативно-правовое и методическое обеспечение деятельности заместителя директора, курирующего воспитательную работу
Нормативно-правовое и методическое обеспечение деятельности заместителя директора, курирующего воспитательную работу Николай Михайлович Рубцов (1936-1971)
Николай Михайлович Рубцов (1936-1971) PRO-KLIMA. Системы кондиционирования, оптимально для Вас
PRO-KLIMA. Системы кондиционирования, оптимально для Вас Нефть Краснодарского края
Нефть Краснодарского края Рассмотрите иллюстрации на следующем слайде, определите вид искусства
Рассмотрите иллюстрации на следующем слайде, определите вид искусства 20160116_desyatichnye_drobi
20160116_desyatichnye_drobi Grammar._Passive_Voice_1
Grammar._Passive_Voice_1 Рафф А. М. Электронные учебники
Рафф А. М. Электронные учебники Роль религии в современном мире
Роль религии в современном мире Ткацкий станок: вчера и сегодня
Ткацкий станок: вчера и сегодня Черная металлургия
Черная металлургия СС для 1-го курса2022(1)
СС для 1-го курса2022(1) PDDD
PDDD