- Электромеханические измерительные механизмы

Содержание
- 2. ЦЕЛИ ЗАНЯТИЯ: 1. Изучить классификацию ЭИП 2. Изучить назначение и основные узлы ЭИП. Условные обозначения, наносимые
- 3. ВОПРОСЫ: 3. Магнитоэлектрические механизмы 1. Классификация электроизмерительных приборов 2. Основные узлы и принцип работы электроизмери-тельных механизмов
- 4. 1. Классификация электроизмерительных приборов Электроизмерительные приборы классифицируют: электромеханические электротепловые электронные электронно-лучевые
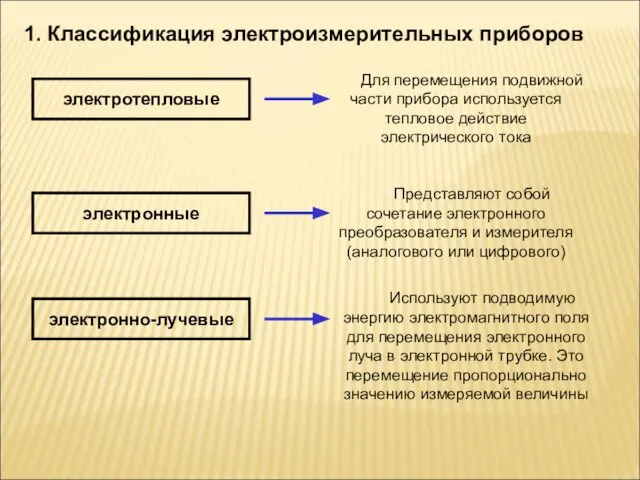
- 5. 1. Классификация электроизмерительных приборов электротепловые Для перемещения подвижной части прибора используется тепловое действие электрического тока электронные
- 6. 1. КЛАССИФИКАЦИЯ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ электромеханические Для перемещения подвижной части прибора используются различные электромагнитные процессы магнитоэлектрические электромагнитные
- 7. 2. Основные узлы и принцип работы электроизмери-тельных механизмов 2.1. Структурная схема электромеханического прибора 2.2. Принцип работы
- 8. 2. Основные узлы и принцип работы электроизмери-тельных механизмов Противодействующий момент, возникающий при закручивании пружины (растяжки, подвеса),
- 9. 2. Основные узлы и принцип работы электроизмери-тельных механизмов 2.3. Основные узлы электроизмерительных механизмов шкала корпус успокоитель
- 10. 3. Магнитоэлектрические механизмы. Структура магнитоэлектрического механизма (а) и принцип его действия (б) Принцип действия магнитоэлектрических механизмов
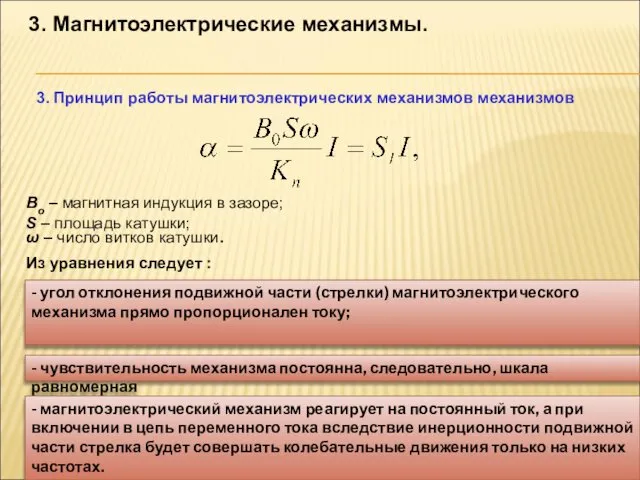
- 11. 3. Магнитоэлектрические механизмы. 3. Принцип работы магнитоэлектрических механизмов механизмов Во – магнитная индукция в зазоре; S
- 12. 3. Магнитоэлектрические механизмы. Достоинства: малое потребление мощности, высокая чувствительность ,равномерная шкала, небольшие погрешности измерений. Недостатки: малая
- 13. 4. Электромагнитные механизмы. Принцип работы электромагнитных механизмов основан на взаимодействии магнитного поля катушки с током и
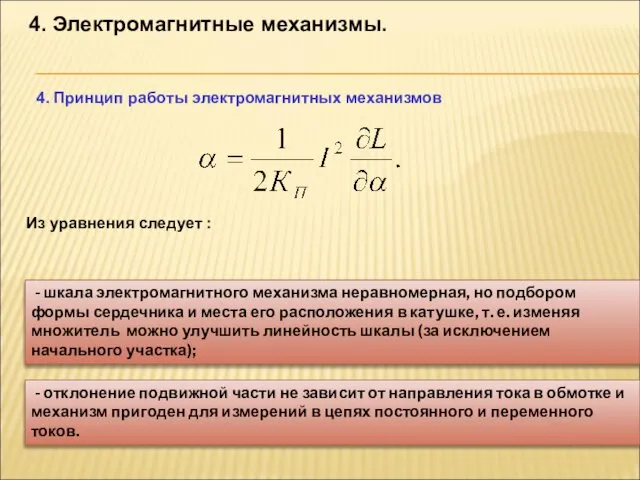
- 14. 4. Электромагнитные механизмы. 4. Принцип работы электромагнитных механизмов Из уравнения следует : - шкала электромагнитного механизма
- 15. 4. Электромагнитные механизмы. Достоинства: надежность и сравнительно низкая стоимость. Недостатки: неравномерность шкалы и сравнительно большая погрешность,
- 16. 5. Электродинамические механизмы. Принцип действия электродинамических механизмов заключается во взаимодействии магнитных полей неподвижных и подвижных контуров
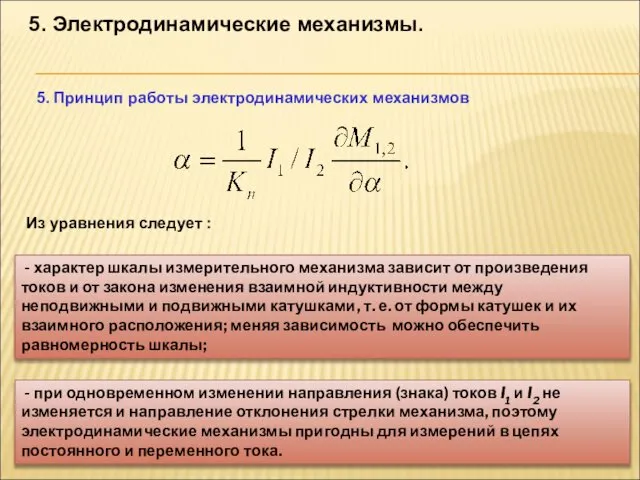
- 17. 5. Электродинамические механизмы. 5. Принцип работы электродинамических механизмов Из уравнения следует : - характер шкалы измерительного
- 18. 5. Электродинамические механизмы. Достоинства: возможность измерения тока, мощности, разности фаз между током и напряжением на нагрузке,
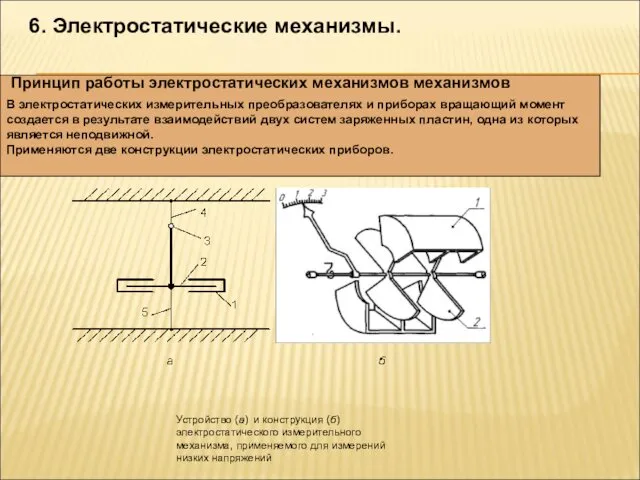
- 19. 6. Электростатические механизмы. В электростатических измерительных преобразователях и приборах вращающий момент создается в результате взаимодействий двух
- 20. 6. Электростатические механизмы. Принцип работы электростатических механизмов механизмов Устройство электростатического измерительного механизма, применяемого для измерений высоких
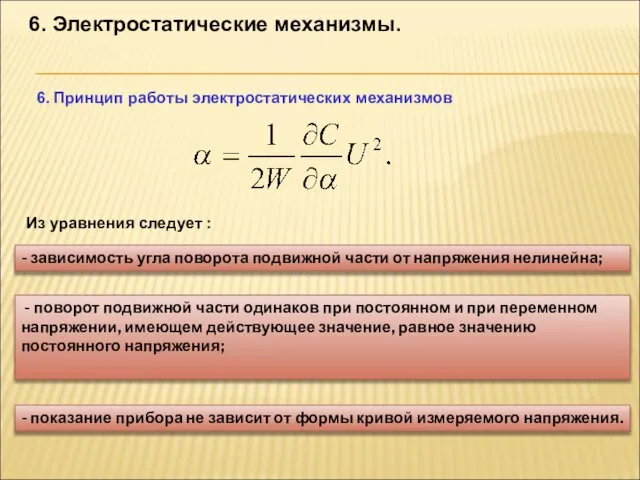
- 21. 6. Электростатические механизмы. 6. Принцип работы электростатических механизмов Из уравнения следует : - поворот подвижной части
- 22. 6. Электростатические механизмы. Достоинства: очень малое собственное потребление мощности от измеряемой цепи. Недостатки: малая чувствительность, неравномерность
- 23. 2. Основные узлы и принцип работы электроизмери-тельных механизмов Электромеханический измерительный механизм (ЭИМ) прибора прямого действия состоит
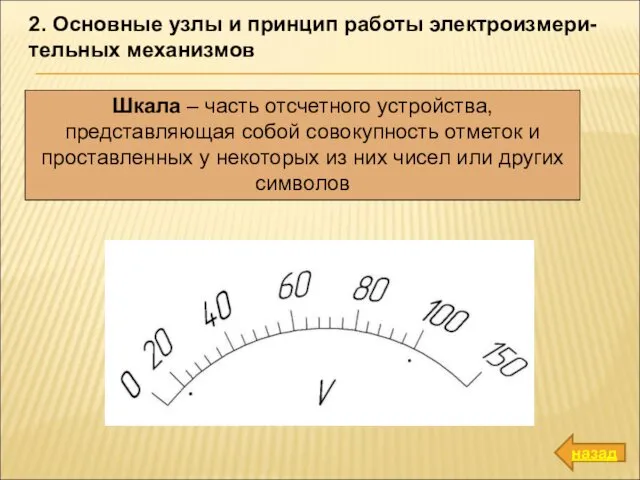
- 24. 2. Основные узлы и принцип работы электроизмери-тельных механизмов Шкала – часть отсчетного устройства, представляющая собой совокупность
- 25. 2. Основные узлы и принцип работы электроизмери-тельных механизмов Условные обозначения, наносимые на шкалу и вспомогательные части
- 26. 2. Основные узлы и принцип работы электроизмери-тельных механизмов Условные обозначения, наносимые на шкалу и вспомогательные части
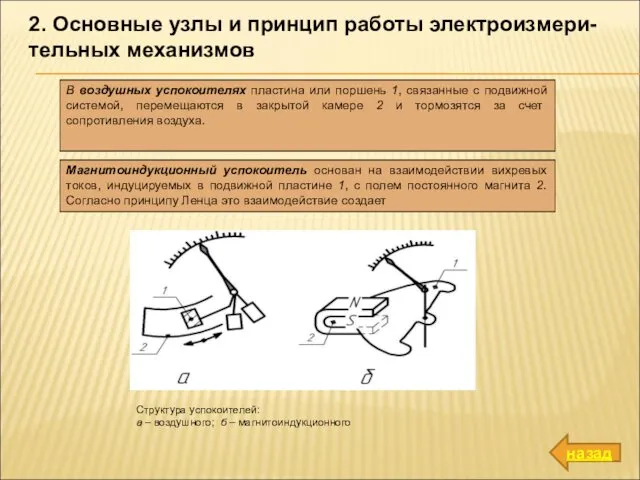
- 27. 2. Основные узлы и принцип работы электроизмери-тельных механизмов В воздушных успокоителях пластина или поршень 1, связанные
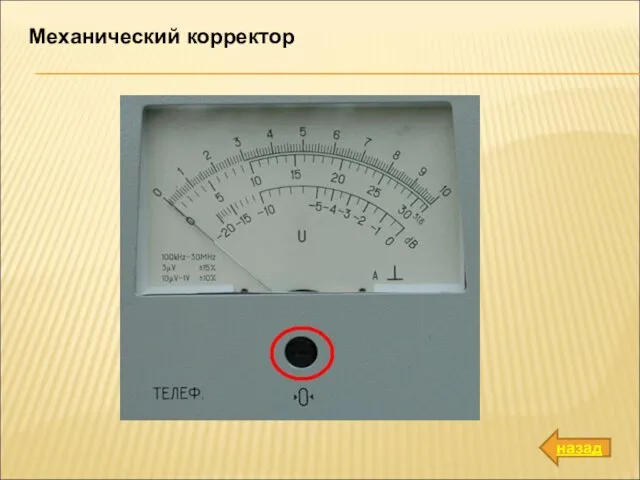
- 28. Механический корректор назад
- 29. Механический корректор назад
- 31. Скачать презентацию
ЦЕЛИ ЗАНЯТИЯ:
1. Изучить классификацию ЭИП
2. Изучить назначение и основные узлы ЭИП.
ЦЕЛИ ЗАНЯТИЯ:
1. Изучить классификацию ЭИП
2. Изучить назначение и основные узлы ЭИП.
ВОПРОСЫ:
3. Магнитоэлектрические механизмы
1. Классификация электроизмерительных приборов
2. Основные узлы и принцип работы
ВОПРОСЫ:
3. Магнитоэлектрические механизмы
1. Классификация электроизмерительных приборов
2. Основные узлы и принцип работы
1. Классификация электроизмерительных приборов
Электроизмерительные приборы
классифицируют:
электромеханические
электротепловые
электронные
электронно-лучевые
1. Классификация электроизмерительных приборов
Электроизмерительные приборы
классифицируют:
электромеханические
электротепловые
электронные
электронно-лучевые
1. Классификация электроизмерительных приборов
электротепловые
Для перемещения подвижной части прибора используется тепловое действие
1. Классификация электроизмерительных приборов
электротепловые
Для перемещения подвижной части прибора используется тепловое действие
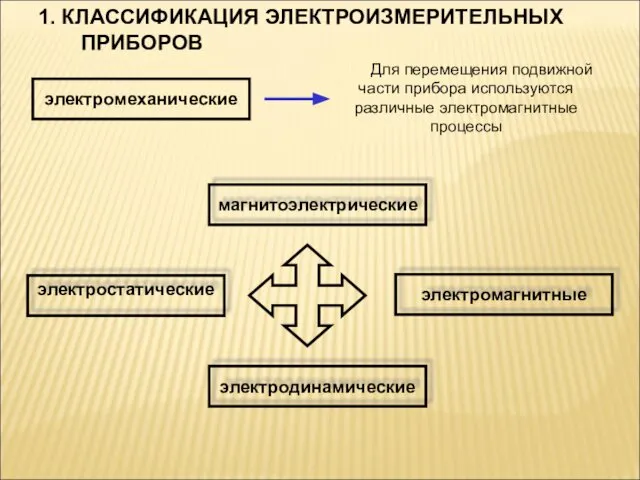
1. КЛАССИФИКАЦИЯ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
электромеханические
Для перемещения подвижной части прибора используются различные электромагнитные
1. КЛАССИФИКАЦИЯ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
электромеханические
Для перемещения подвижной части прибора используются различные электромагнитные
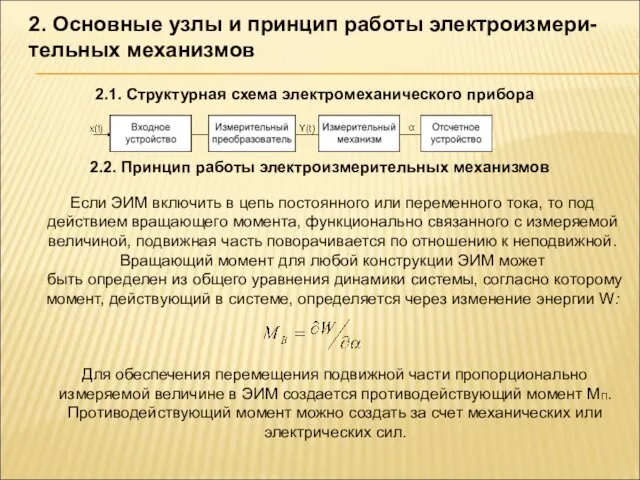
2. Основные узлы и принцип работы электроизмери-тельных механизмов
2.1. Структурная схема электромеханического
2. Основные узлы и принцип работы электроизмери-тельных механизмов
2.1. Структурная схема электромеханического
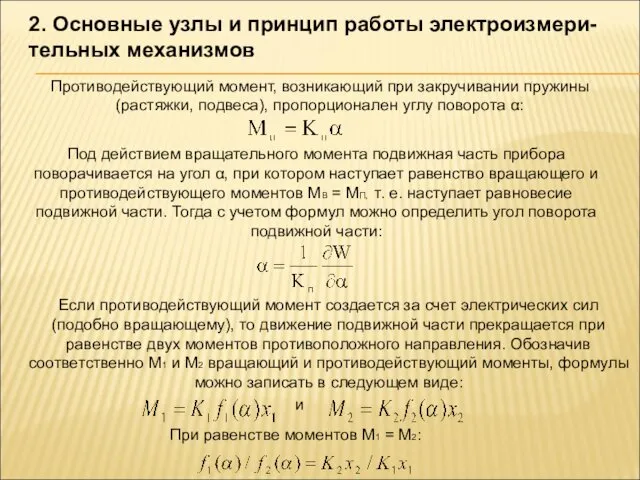
2. Основные узлы и принцип работы электроизмери-тельных механизмов
Противодействующий момент, возникающий при
2. Основные узлы и принцип работы электроизмери-тельных механизмов
Противодействующий момент, возникающий при
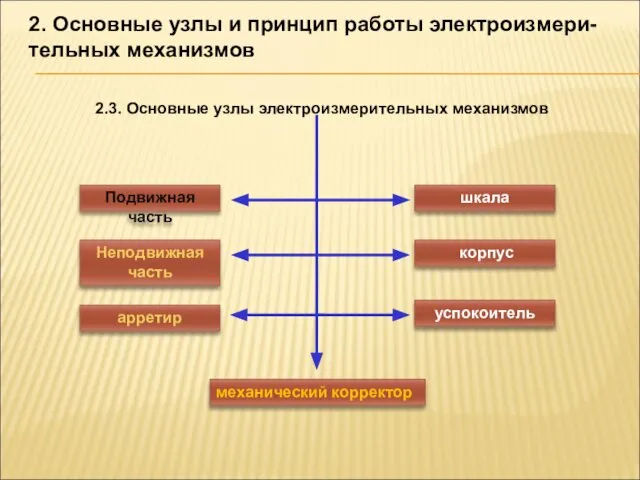
2. Основные узлы и принцип работы электроизмери-тельных механизмов
2.3. Основные узлы электроизмерительных
2. Основные узлы и принцип работы электроизмери-тельных механизмов
2.3. Основные узлы электроизмерительных
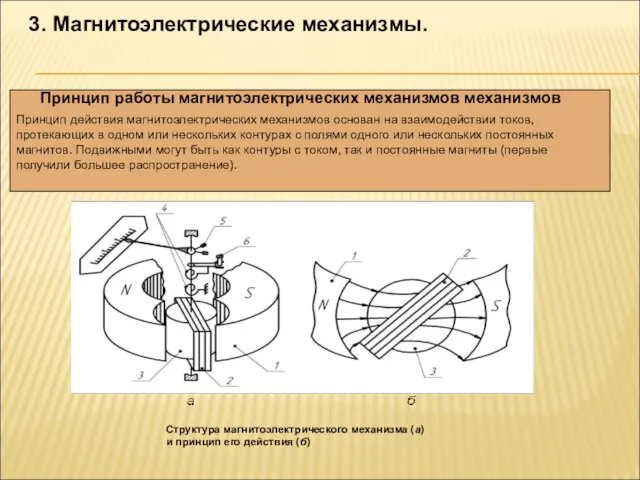
3. Магнитоэлектрические механизмы.
Структура магнитоэлектрического механизма (а)
и принцип его действия (б)
Принцип действия
3. Магнитоэлектрические механизмы.
Структура магнитоэлектрического механизма (а)
и принцип его действия (б)
Принцип действия
3. Магнитоэлектрические механизмы.
3. Принцип работы магнитоэлектрических механизмов механизмов
Во – магнитная индукция
3. Магнитоэлектрические механизмы.
3. Принцип работы магнитоэлектрических механизмов механизмов
Во – магнитная индукция
3. Магнитоэлектрические механизмы.
Достоинства: малое потребление мощности, высокая чувствительность ,равномерная шкала, небольшие
3. Магнитоэлектрические механизмы.
Достоинства: малое потребление мощности, высокая чувствительность ,равномерная шкала, небольшие

4. Электромагнитные механизмы.
Принцип работы электромагнитных механизмов основан на взаимодействии магнитного
4. Электромагнитные механизмы.
Принцип работы электромагнитных механизмов основан на взаимодействии магнитного
4. Электромагнитные механизмы.
4. Принцип работы электромагнитных механизмов
Из уравнения следует :
4. Электромагнитные механизмы.
4. Принцип работы электромагнитных механизмов
Из уравнения следует :
4. Электромагнитные механизмы.
Достоинства: надежность и сравнительно низкая стоимость.
Недостатки: неравномерность шкалы
4. Электромагнитные механизмы.
Достоинства: надежность и сравнительно низкая стоимость.
Недостатки: неравномерность шкалы

5. Электродинамические механизмы.
Принцип действия электродинамических механизмов заключается во взаимодействии магнитных полей
5. Электродинамические механизмы.
Принцип действия электродинамических механизмов заключается во взаимодействии магнитных полей
5. Электродинамические механизмы.
5. Принцип работы электродинамических механизмов
Из уравнения следует :
-
5. Электродинамические механизмы.
5. Принцип работы электродинамических механизмов
Из уравнения следует :
-
5. Электродинамические механизмы.
Достоинства: возможность измерения тока, мощности, разности фаз между током
5. Электродинамические механизмы.
Достоинства: возможность измерения тока, мощности, разности фаз между током
6. Электростатические механизмы.
В электростатических измерительных преобразователях и приборах вращающий момент создается
6. Электростатические механизмы.
В электростатических измерительных преобразователях и приборах вращающий момент создается

6. Электростатические механизмы.
Принцип работы электростатических механизмов механизмов
Устройство электростатического измерительного механизма,
6. Электростатические механизмы.
Принцип работы электростатических механизмов механизмов
Устройство электростатического измерительного механизма,
6. Электростатические механизмы.
6. Принцип работы электростатических механизмов
Из уравнения следует :
-
6. Электростатические механизмы.
6. Принцип работы электростатических механизмов
Из уравнения следует :
-
6. Электростатические механизмы.
Достоинства: очень малое собственное потребление мощности от измеряемой цепи.
Недостатки:
6. Электростатические механизмы.
Достоинства: очень малое собственное потребление мощности от измеряемой цепи.
Недостатки:

2. Основные узлы и принцип работы электроизмери-тельных механизмов
Электромеханический измерительный механизм (ЭИМ)
2. Основные узлы и принцип работы электроизмери-тельных механизмов
Электромеханический измерительный механизм (ЭИМ)
2. Основные узлы и принцип работы электроизмери-тельных механизмов
Шкала – часть отсчетного
2. Основные узлы и принцип работы электроизмери-тельных механизмов
Шкала – часть отсчетного

2. Основные узлы и принцип работы электроизмери-тельных механизмов
Условные обозначения, наносимые на
2. Основные узлы и принцип работы электроизмери-тельных механизмов
Условные обозначения, наносимые на

2. Основные узлы и принцип работы электроизмери-тельных механизмов
Условные обозначения, наносимые на
2. Основные узлы и принцип работы электроизмери-тельных механизмов
Условные обозначения, наносимые на
2. Основные узлы и принцип работы электроизмери-тельных механизмов
В воздушных успокоителях пластина
2. Основные узлы и принцип работы электроизмери-тельных механизмов
В воздушных успокоителях пластина

Механический корректор
назад
Механический корректор
назад
Механический корректор
назад
Механический корректор
назад
 Виды туризма
Виды туризма Журналист? Кто такой?!
Журналист? Кто такой?! Новые стеклообразные материалы и методы их синтеза. Методы осаждения аморфной фазы из растворов
Новые стеклообразные материалы и методы их синтеза. Методы осаждения аморфной фазы из растворов Расчет основных режимов работы районной электрической сети в Ивановской области
Расчет основных режимов работы районной электрической сети в Ивановской области Культура ислама
Культура ислама Настилання підлоги ліноліумом
Настилання підлоги ліноліумом 20140123_agressiya_1_u_detey_kak_sledstvie_uvlecheniya_kompyuternymi_-_kopiya_0
20140123_agressiya_1_u_detey_kak_sledstvie_uvlecheniya_kompyuternymi_-_kopiya_0 Prezentatsia_po_literature (1)
Prezentatsia_po_literature (1) Энергия вокруг нас или как за нее не платить. Новые мировые тенденции 2016 года
Энергия вокруг нас или как за нее не платить. Новые мировые тенденции 2016 года Proekt_po_seti_pekaren_Bushe
Proekt_po_seti_pekaren_Bushe Домострой – энциклопедия ведения домашнего хозяйства
Домострой – энциклопедия ведения домашнего хозяйства Доклад начальника ОК и РЛС УФСИН России по Новгородской области. О результатах работы в учреждениях УИС Новгородской области
Доклад начальника ОК и РЛС УФСИН России по Новгородской области. О результатах работы в учреждениях УИС Новгородской области МБОУ СШ 9 Акция Синий платочек
МБОУ СШ 9 Акция Синий платочек Слайди. Новорічне асорті
Слайди. Новорічне асорті а
а Библейский цикл (древняя книга)
Библейский цикл (древняя книга) Интерактивная игра Загадки о войне
Интерактивная игра Загадки о войне Week 1 Lessons_1_2 (2)
Week 1 Lessons_1_2 (2) 20160507_ssha
20160507_ssha 1
1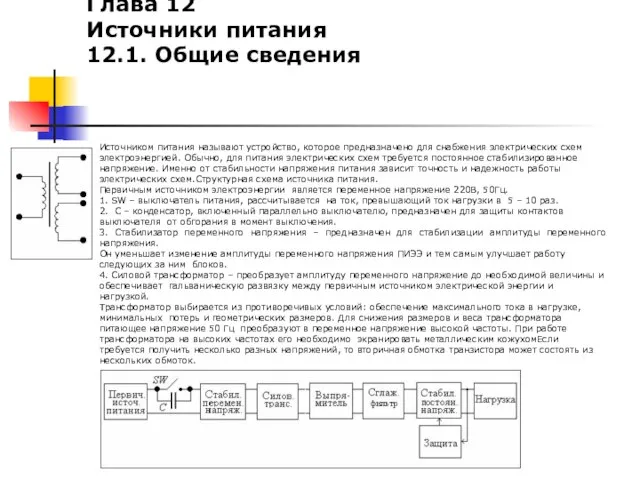 Источники питания. Общие сведения
Источники питания. Общие сведения Основы обогащения полезных ископаемых. Рудоподготовка. Измельчение. Классификация. Промывка
Основы обогащения полезных ископаемых. Рудоподготовка. Измельчение. Классификация. Промывка Презентация Технологические процессы по ТО и Ремонту автомобилей
Презентация Технологические процессы по ТО и Ремонту автомобилей Ленточные конвейеры, виды и назначение
Ленточные конвейеры, виды и назначение Особенности дистанционного обучения по физике
Особенности дистанционного обучения по физике С днём рождения
С днём рождения Do you have an example to follow?
Do you have an example to follow? Этикет принцессы
Этикет принцессы