- Использование радиолокатора и САРП для обеспечения безопасности плавания

Содержание
- 2. Понятие о радиолокации Процесс обнаружения объектов в пространстве и определение их координат радиотехническими методами называется радиолокацией.
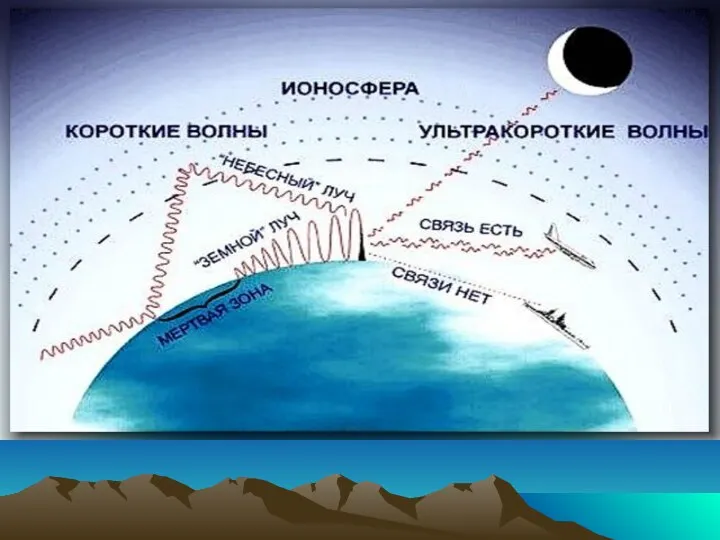
- 3. Радиочастоты и частотные диапозоны Частота радиоволн f(гц)Скорость распространения радиоволн = 300 000 км/сек = 300 000
- 4. ДИАПОЗОНЫ ЧАСТОТ
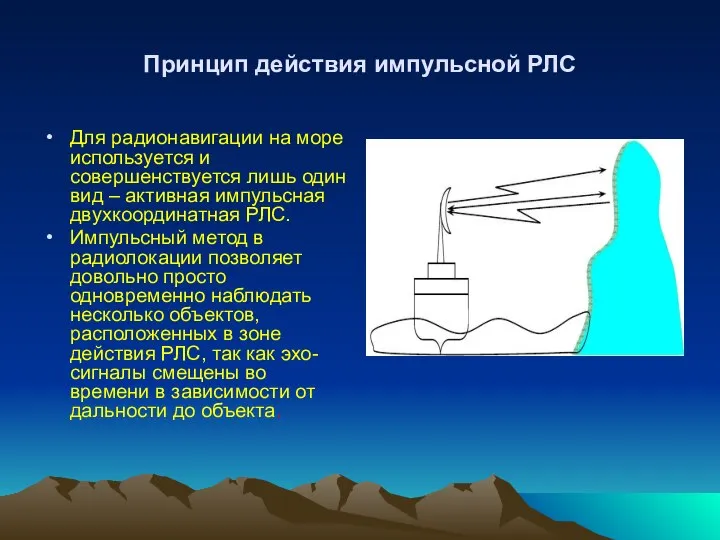
- 6. Принцип действия импульсной РЛС Для радионавигации на море используется и совершенствуется лишь один вид – активная
- 7. Импульсный метод в радиолокации
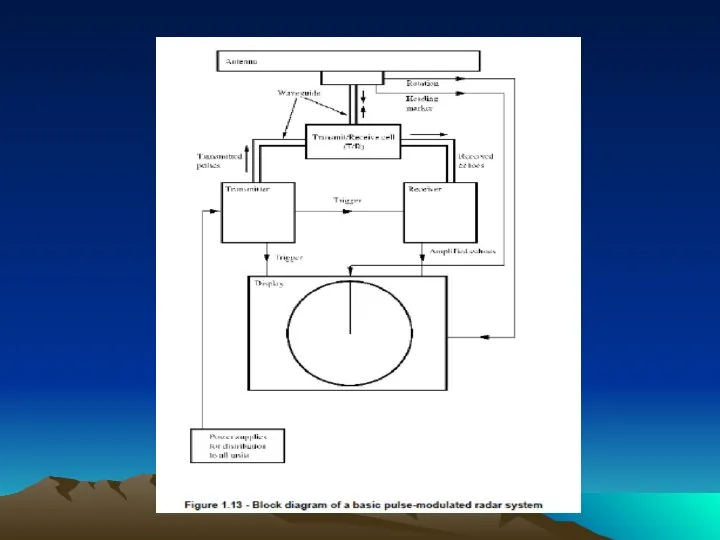
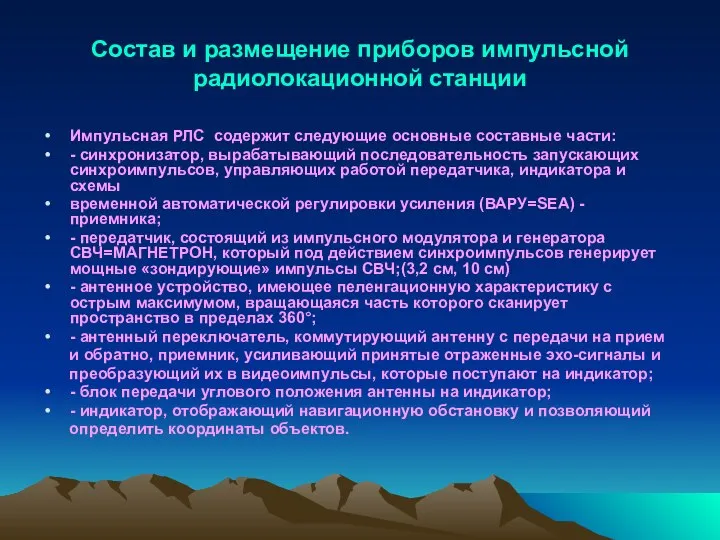
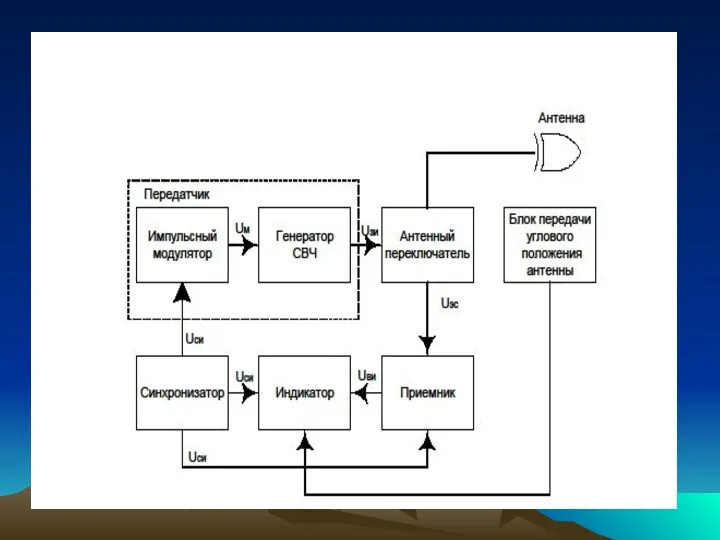
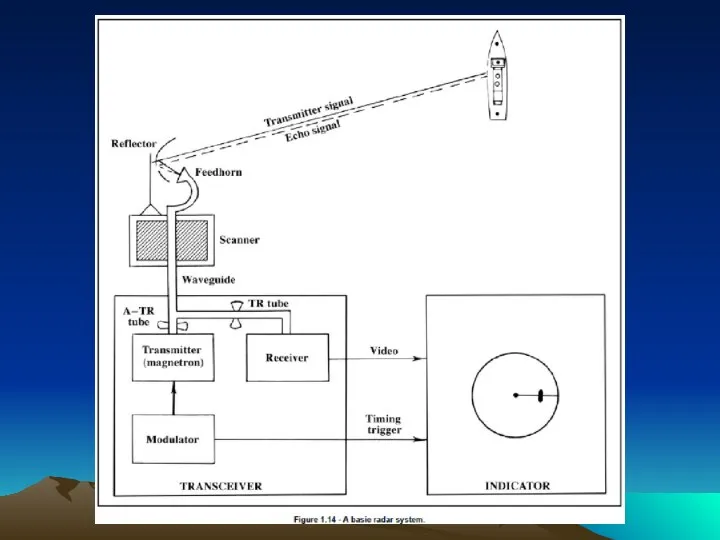
- 9. Состав и размещение приборов импульсной радиолокационной станции Импульсная РЛС содержит следующие основные составные части: - синхронизатор,
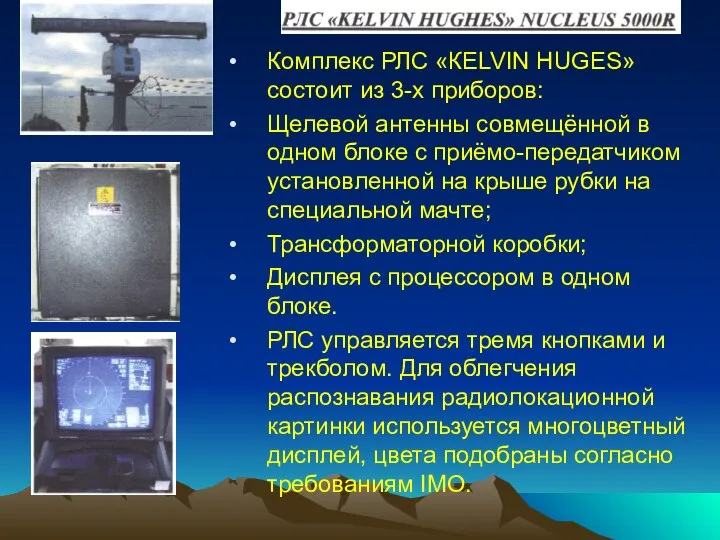
- 10. Комплекс РЛС «КЕLVIN HUGES» состоит из 3-х приборов: Щелевой антенны совмещённой в одном блоке с приёмо-передатчиком
- 13. Основные эксплуатационные характеристики РЛС Работа радиолокатора состоит из многих процессов, совокупность которых позволяет получить радиолокационное изображение
- 14. Направленность излучения В судовых радиолокаторах применяются антенны самых различных конструкций, формирующие радиолокационный луч, узкий в горизонтальной
- 15. Длительность импульса Радиоимпульс имеет два фронта: передний обращенный в сторону распространения, и задний. Время, в течение
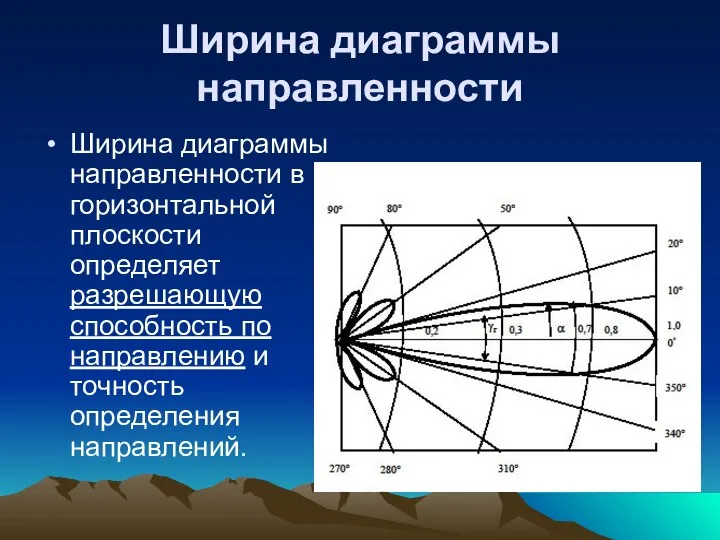
- 16. Ширина диаграммы направленности Ширина диаграммы направленности в горизонтальной плоскости определяет разрешающую способность по направлению и точность
- 17. Мощность излучения и чувствительность приемника Чем мощнее излучение и выше чувствительность приемника, тем на больших расстояниях
- 18. Частота следования импульсов и скорость вращения антенны чтобы получить достаточно устойчивую отметку на экране, необходимо каждый
- 19. Параметры разверток и шкалы дальности Масштаб развертки пропорционален скорости развертки, чем больше скорость развертки, тем крупнее
- 20. Параметры электроннолучевой трубки
- 21. Индикатор РЛС
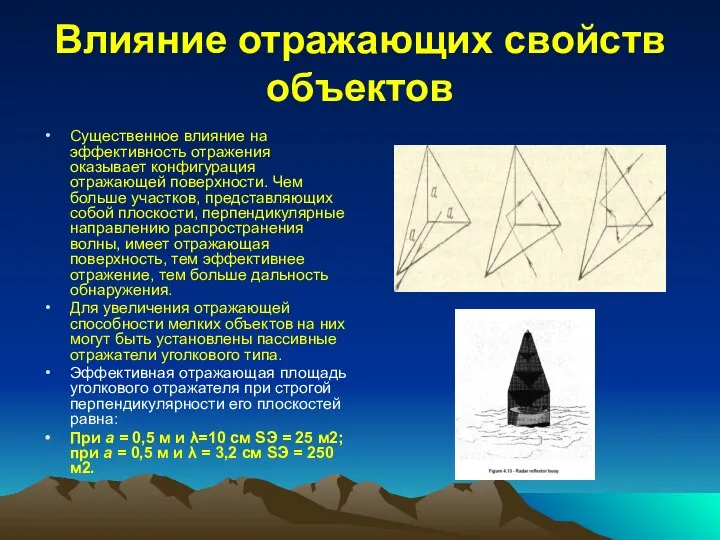
- 22. Влияние отражающих свойств объектов Существенное влияние на эффективность отражения оказывает конфигурация отражающей поверхности. Чем больше участков,
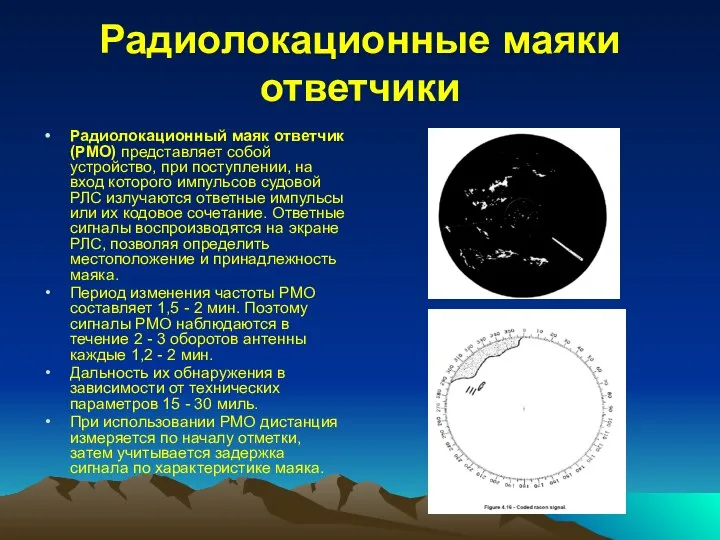
- 23. Радиолокационные маяки ответчики Радиолокационный маяк ответчик (РМО) представляет собой устройство, при поступлении, на вход которого импульсов
- 24. Радиолокационный маяк-ответчик (РЛМО) (РЛМО) обеспечивает определение местоположения судов, терпящих бедствие, посредством передачи сигналов, которые на экране
- 25. Влияние условий распространения радиоволн Радиоволны сантиметрового диапазона при наиболее часто встречающемся состоянии атмосферы распространяются, слегка огибая
- 26. При отклонении атмосферных условий от нормальных в ту или другую сторону изменяется степень огибания радиоволной земной
- 27. Помехи в работе РЛС Источники помех можно разделить на два вида: реально существующие мешающие объекты, отражающие
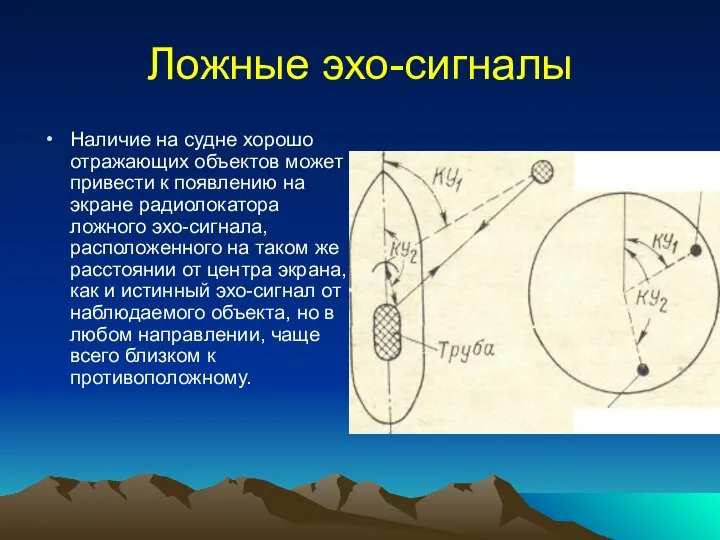
- 28. Ложные эхо-сигналы Наличие на судне хорошо отражающих объектов может привести к появлению на экране радиолокатора ложного
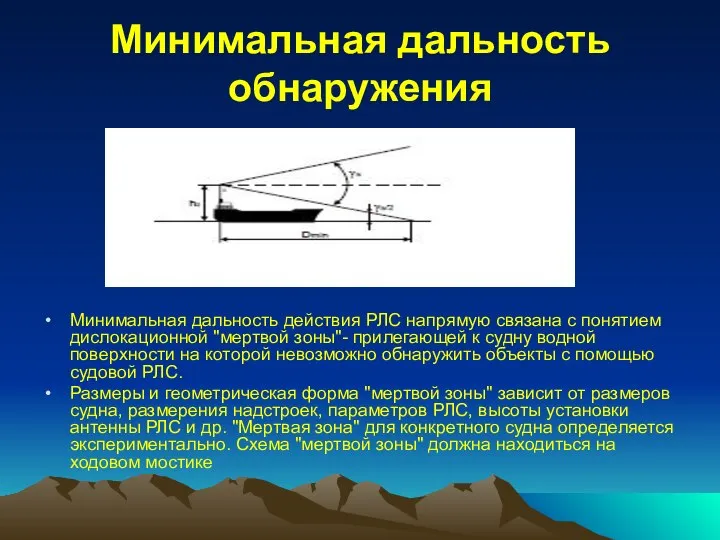
- 29. Минимальная дальность обнаружения Минимальная дальность действия РЛС напрямую связана с понятием дислокационной "мертвой зоны"- прилегающей к
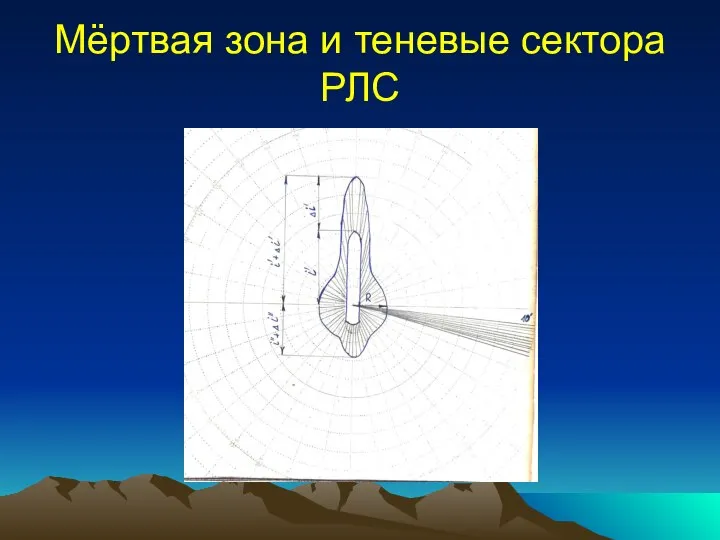
- 30. Мёртвая зона и теневые сектора РЛС
- 31. Мёртвая зона и теневые сектора РЛС «Кеlvin Hages» М Кбт R1 36 0,7 R2 9 0,05
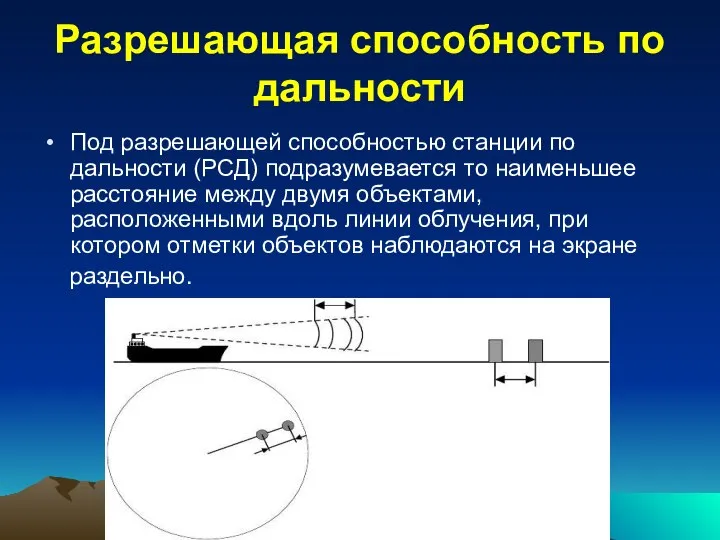
- 32. Разрешающая способность по дальности Под разрешающей способностью станции по дальности (РСД) подразумевается то наименьшее расстояние между
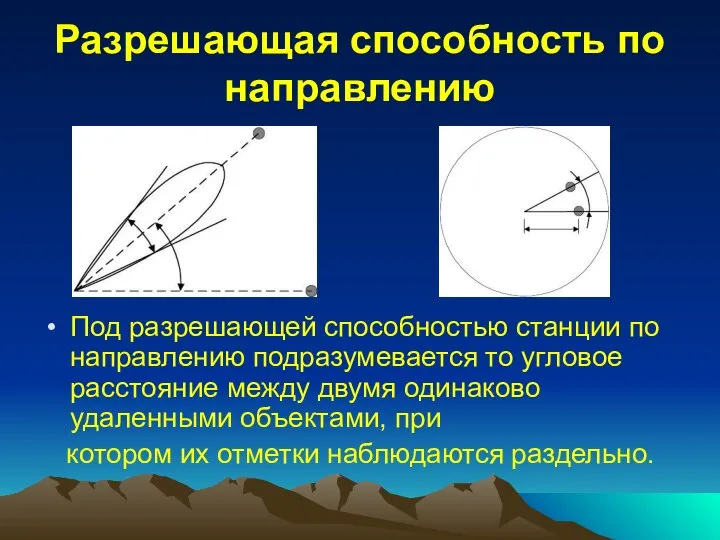
- 33. Разрешающая способность по направлению Под разрешающей способностью станции по направлению подразумевается то угловое расстояние между двумя
- 34. Режимы работы радиолокационной станции. Частотный диапазон. В случае двухканальной комплектации РЛС, имеется возможность работы в одном
- 35. Шкала дальности В современных РЛС используются различные шкалы дальности от 0.5 - 0.75 до 64 и
- 36. На этих шкалах предусмотрена возможность отображения истинного движения и смещения центра развертки
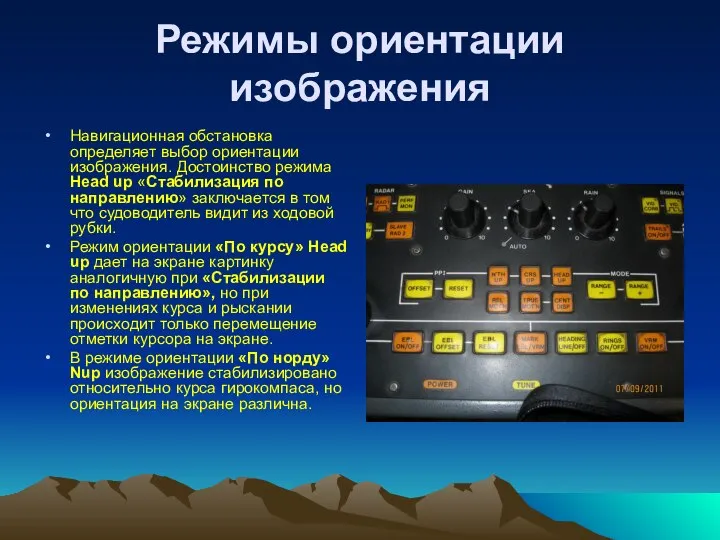
- 37. Режимы ориентации изображения Навигационная обстановка определяет выбор ориентации изображения. Достоинство режима Head up «Стабилизация по направлению»
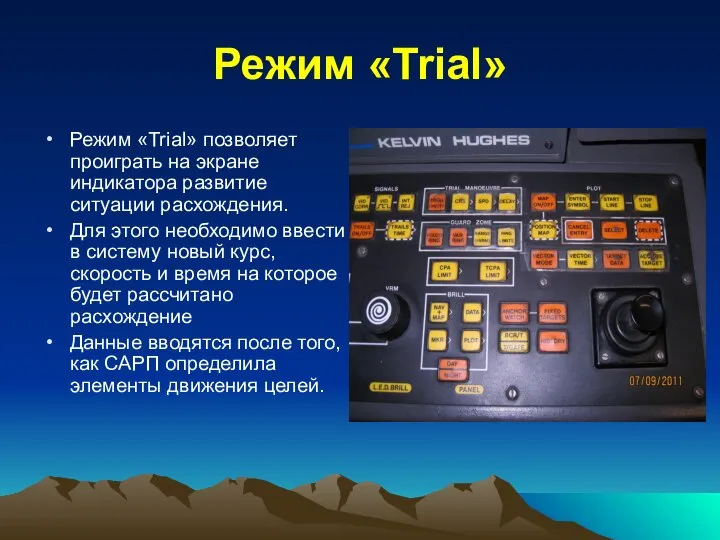
- 38. Режим «Trial» Режим «Trial» позволяет проиграть на экране индикатора развитие ситуации расхождения. Для этого необходимо ввести
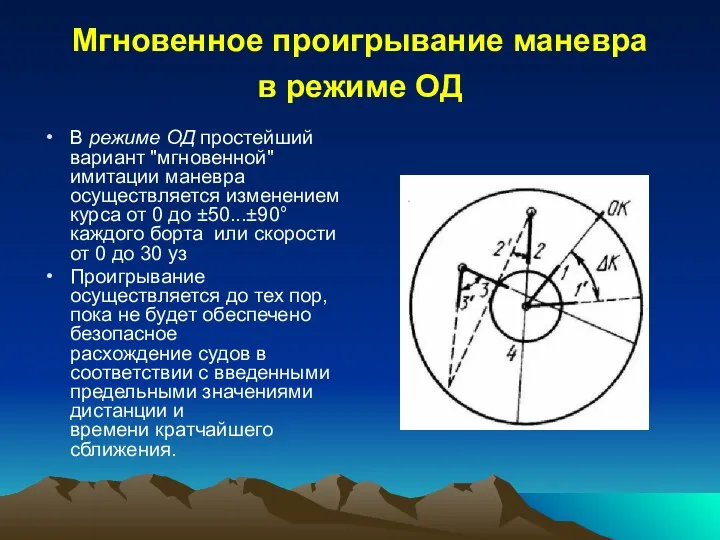
- 39. Мгновенное проигрывание маневра в режиме ОД В режиме ОД простейший вариант "мгновенной" имитации маневра осуществляется изменением
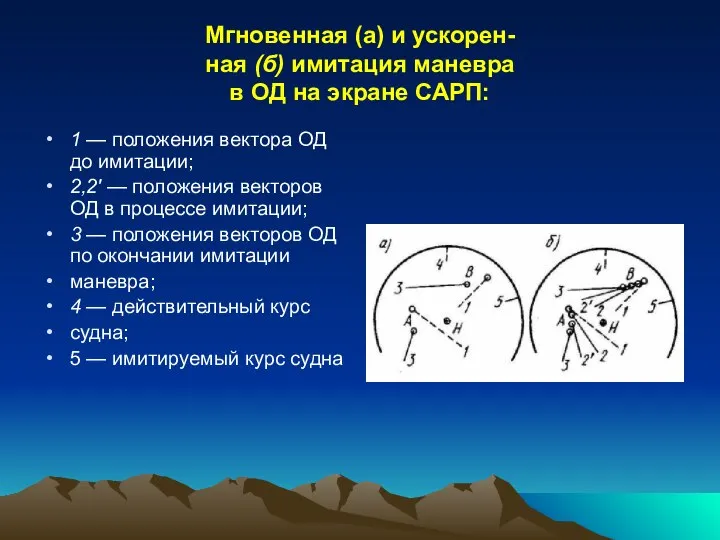
- 40. Мгновенная (а) и ускорен- ная (б) имитация маневра в ОД на экране САРП: 1 — положения
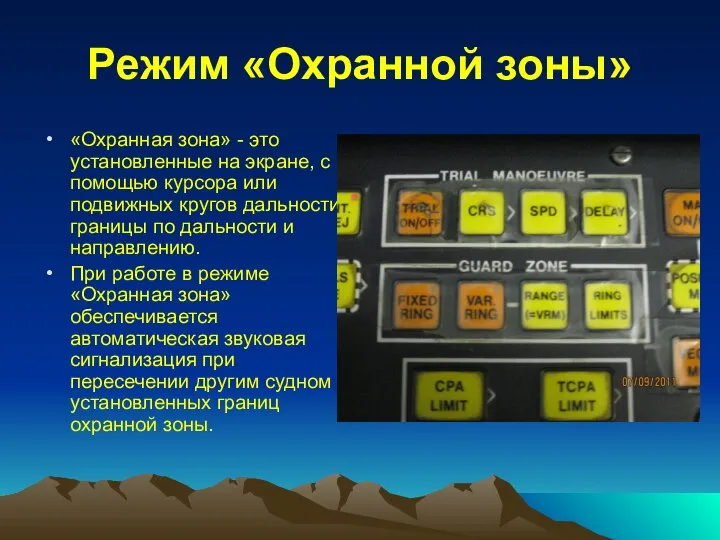
- 41. Режим «Охранной зоны» «Охранная зона» - это установленные на экране, с помощью курсора или подвижных кругов
- 43. Зона автоматического захвата и барьерные линии на экране САРП: Все САРП, отвечающие требованиям Резолюции А.422(ХI), обеспечивают
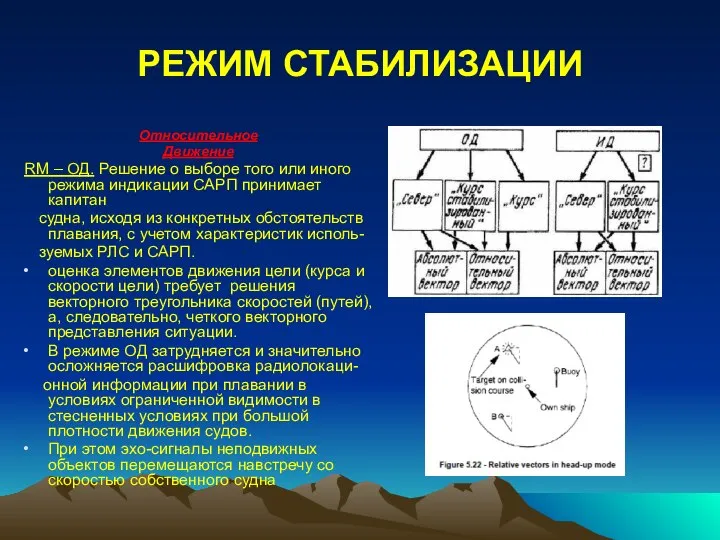
- 44. РЕЖИМ СТАБИЛИЗАЦИИ Относительное Движение RM – ОД. Решение о выборе того или иного режима индикации САРП
- 45. Относительные векторы движения
- 46. Оценка наличия опасности столкновения
- 47. Эффект при изменении курса в режиме ОД - RM
- 48. Схема закономерностей перемещения эхо-сигнала на экране РЛС в режиме ОД
- 49. Общая блок-схема выбора маневра на расхождение
- 50. Индикация на экране САРП в режиме ИД при вводе вектора скорости собственного судна относительно грунта (в)
- 51. ИСТИННОЕ ДВИЖЕНИЕ Истинное движение TM- ИД В режиме "истинного движения", когда окружающая обстановка наблюдается как бы
- 52. Векторы истинного движения
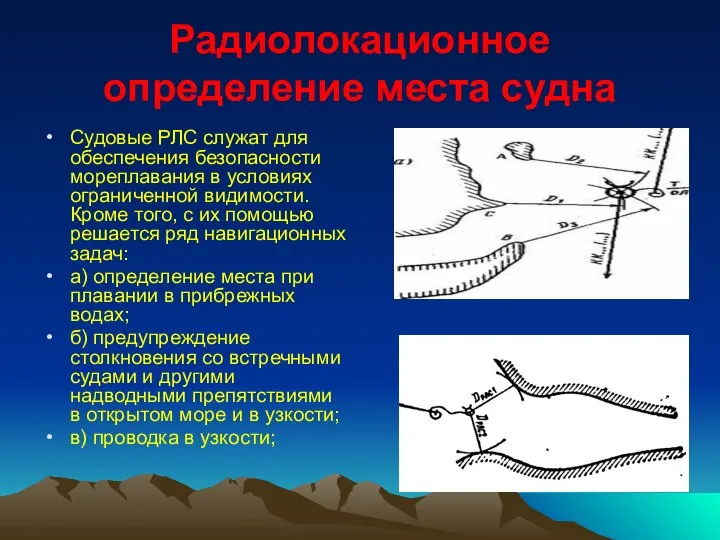
- 53. Радиолокационное определение места судна Судовые РЛС служат для обеспечения безопасности мореплавания в условиях ограниченной видимости. Кроме
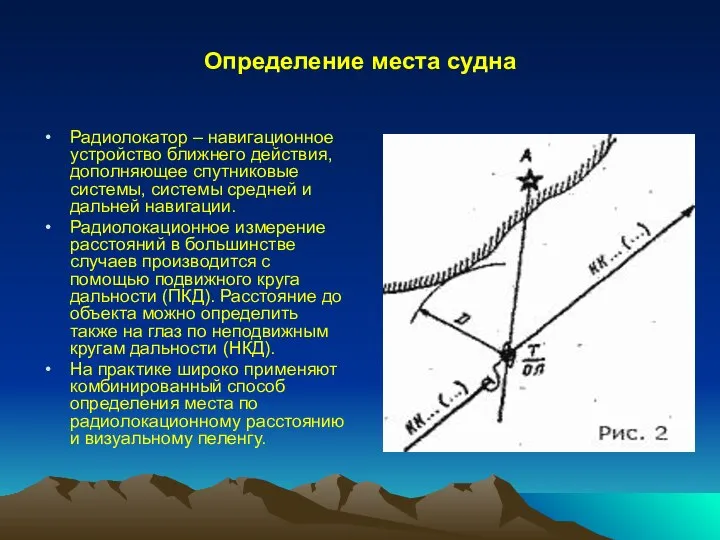
- 54. Определение места судна Радиолокатор – навигационное устройство ближнего действия, дополняющее спутниковые системы, системы средней и дальней
- 55. Использование радиолокатора для расхождения Организация радиолокационного наблюдения: « наблюдай – анализируй ситуацию–действуй». Всестороннее использование РЛС -
- 56. Общие принципы организации наблюдения ситуации, в которых использование РЛС является обязательным: при плавании в условиях ограниченной
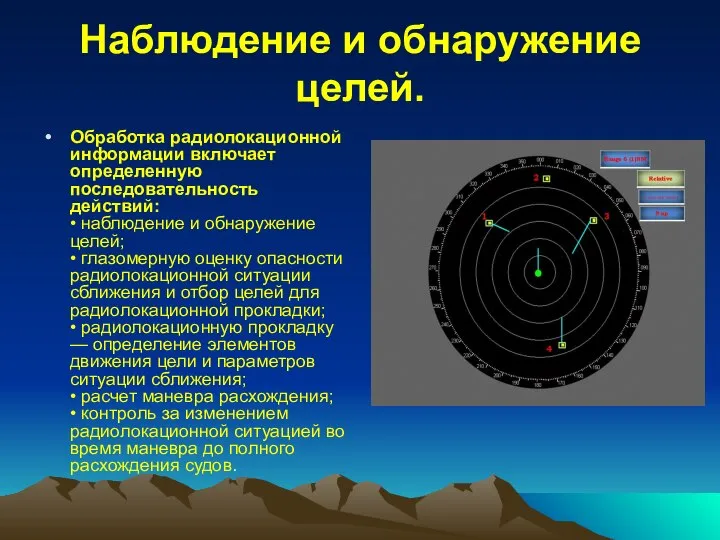
- 57. Наблюдение и обнаружение целей. Обработка радиолокационной информации включает определенную последовательность действий: • наблюдение и обнаружение целей;
- 58. ИСПОЛЬЗОВАНИЕ РАДИОЛОКАТОРА ДЛЯ РАСХОЖДЕНИЯ Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В открытом море
- 59. Глазомерная оценка радиолокационной ситуации Глазомерная оценка является обязательным этапом обработки радиолокационной информации и позволяет при большом
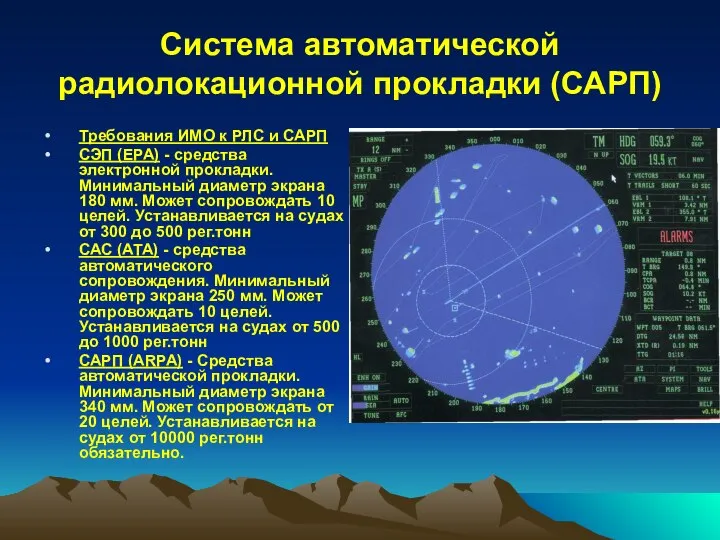
- 60. Система автоматической радиолокационной прокладки (САРП) Требования ИМО к РЛС и САРП СЭП (EPA) - средства электронной
- 61. Основные функции САРП Средства автоматической радиолокационной прокладки (САРП) — это радиолокационные информационно-вычислительные комплексы, обеспечивающие автоматизацию обработки
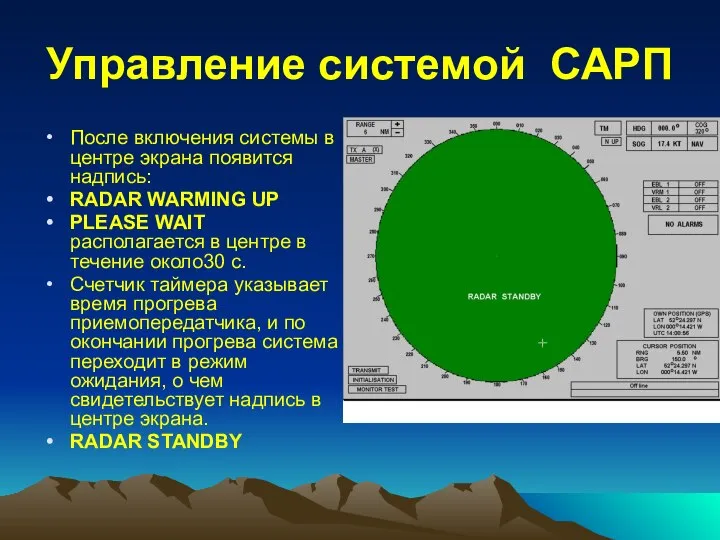
- 62. Управление системой САРП После включения системы в центре экрана появится надпись: RADAR WARMING UP PLEASE WAIT
- 63. Из режима STANDBY имеется доступ к функциям регулировки яркости, изменения параметров курсора, выбор диапазона (при наличии
- 64. Информация на экране TX A - приемопередатчик А (В, С - если имеются) (X) (S) тип
- 65. Режим TRANSMIT - включение излучения При выборе функции TRANSMIT включается излучение и вращение антенны одновременно, экран
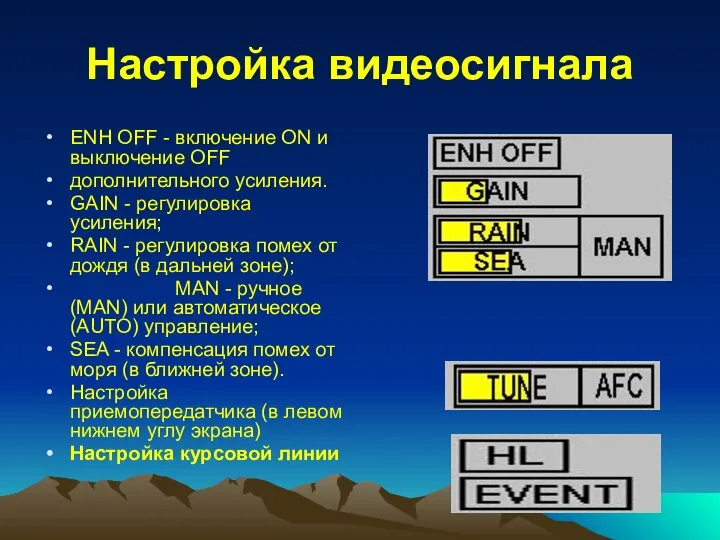
- 67. Настройка видеосигнала ENH OFF - включение ON и выключение OFF дополнительного усиления. GAIN - регулировка усиления;
- 68. Сравнение характеристик 3- и 10-сантиметровых диапазонов радиоволн мощность отраженного сигнала (для одинаковой цели) больше в 10-сантиметровом
- 69. Настройка яркости изображения на экране монитора BRILL DAY NIGHT1, NIGHT2, NIGHT3 HEADING LINE EBL/VRL TARGET ALARM
- 70. Режимы навигационного использования Режим "Проигрывание маневра" - проигрывание одного или двух маневров курсом (+/- 90 º)
- 71. Дополнительные функциональные возможности САРП автоматическое обнаружение эхо-сигналов надводных целей; ручной или автоматический захват целей на сопровождение;
- 72. Основные ограничения САРП Ни одно из существующих САРП не обеспечивает гарантированного обнаружения и захвата на автосопровождение
- 73. Погрешности вычисленных элементов движения цели истинный курс цели — ±5—7°; истинная скорость цели— ±1,2 уз; дистанция
- 74. Использование САРП при расхождении судов Полная оценка ситуации возможна только с помощью анализа как первичной (необработанные
- 75. Схема оценки ситуации: дистанция 10 – 12 миль–зона средней дальности обнаружения объектов на воде и начала
- 76. ИФОРМАЦИЯ ПО ЦЕЛИ
- 78. Использование САРП при расхождении судов Полная оценка ситуации возможна только с помощью анализа как первичной (необработанные
- 79. Выбор маневра Выбор маневра для безопасного расхождения надлежит осуществлять заблаговременно и решительно в строгом соответствии с
- 80. Контроль эффективности маневра При выполнении маневра необходимо внимательно следить за векторами встречных судов, включая индикацию их
- 81. РАДИОЛОКАТОР И МППСС
- 82. ПРАВИЛО 5. Н А Б Л Ю Д Е Н И Е Радиолокационное наблюдение подразумевает обзор
- 83. ПРАВИЛО 6. БЕЗОПАСНАЯ СКОРОСТЬ каждое судно должно ВСЕГДА следовать с безопасной скоростью. каждое судно должно ВСЕГДА
- 84. ПРАВИЛО 7. ОПАСНОСТЬ СТОЛКНОВЕНИЯ Правило 7 (а) рекомендует в случае сомнения в наличии опасности столкновения (ОС)
- 85. ПРАВИЛО 8. ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ Правило 8 применяется при ЛЮБЫХ УСЛОВИЯХ ВИДИМОСТИ.
- 86. Действия при изменении КУРСА судна. “ЛЮБОЕ изменение курса ... должно быть достаточно большим, с тем чтобы
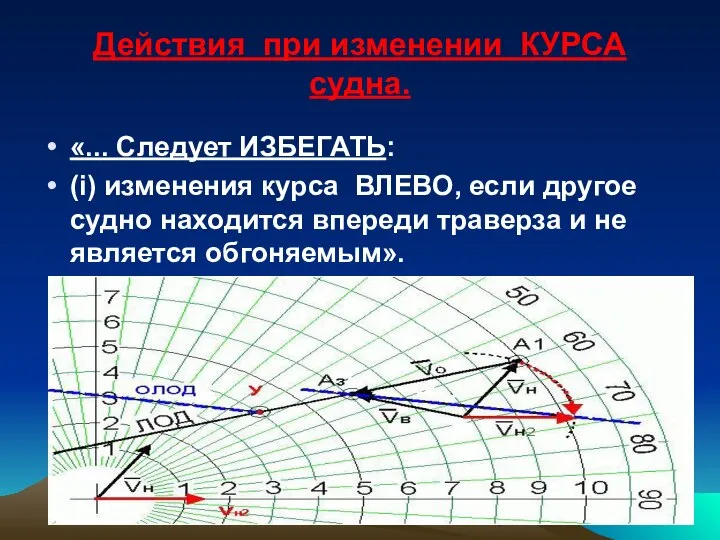
- 87. Действия при изменении КУРСА судна. «... Следует ИЗБЕГАТЬ: (i) изменения курса ВЛЕВО, если другое судно находится
- 88. Действия при изменении СКОРОСТИ судна «ЛЮБОЕ изменение ...СКОРОСТИ... должно быть достаточно большим с тем, чтобы оно
- 89. При определении наличия опасности столкновения необходимо, прежде всего, учитывать следующее: опасность столкновения должна считаться существующей, если
- 90. ТРЕБОВАНИЯ ПДНВ Демонстрация профессиональных навыков. Знание принципов радиолокации, умение пользоваться радиолокатором, расшифровывать и анализировать полученную информацию,
- 91. SOLAS -74 Требования к оснащению судов навигационными системами и оборудованием Все суда валовой вместимостью 3000 и
- 92. ПРАВИЛО 19. ПЛАВАНИЕ СУДОВ ПРИ ОГРАНИЧЕННОЙ ВИДИМОСТИ Термин «ограниченная видимость» означает любые условия, при которых видимость
- 93. Задачи, решаемые САРП САРП решает следующие основные задачи : отображение на экране всей радиолокационной обстановки в
- 94. ИСПОЛЬЗОВАНИЕ САРП ПРИ РАСХОЖДЕНИИ Внедрение средств автоматической радиолокационной прокладки (САРП) позволяет освободить судоводителя от рутинных операций
- 96. Скачать презентацию
Понятие о радиолокации
Процесс обнаружения объектов в пространстве и определение их координат
Понятие о радиолокации
Процесс обнаружения объектов в пространстве и определение их координат
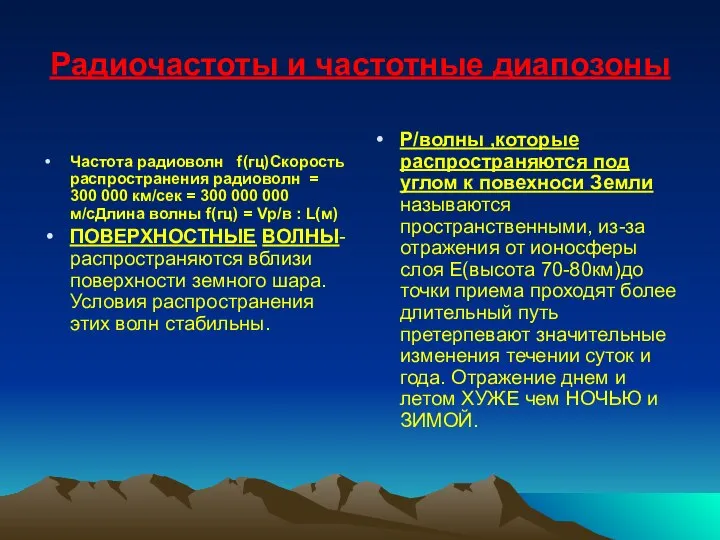
Радиочастоты и частотные диапозоны
Частота радиоволн f(гц)Скорость распространения радиоволн = 300 000
Радиочастоты и частотные диапозоны
Частота радиоволн f(гц)Скорость распространения радиоволн = 300 000
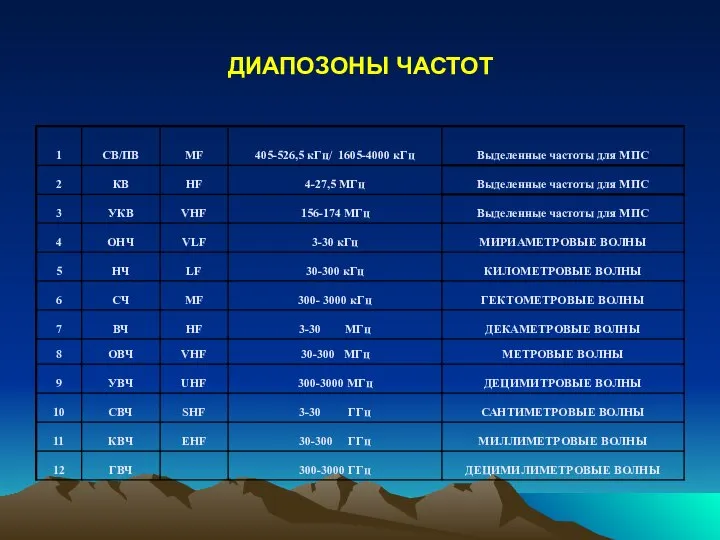
ДИАПОЗОНЫ ЧАСТОТ
ДИАПОЗОНЫ ЧАСТОТ
Принцип действия импульсной РЛС
Для радионавигации на море используется и совершенствуется лишь
Принцип действия импульсной РЛС
Для радионавигации на море используется и совершенствуется лишь
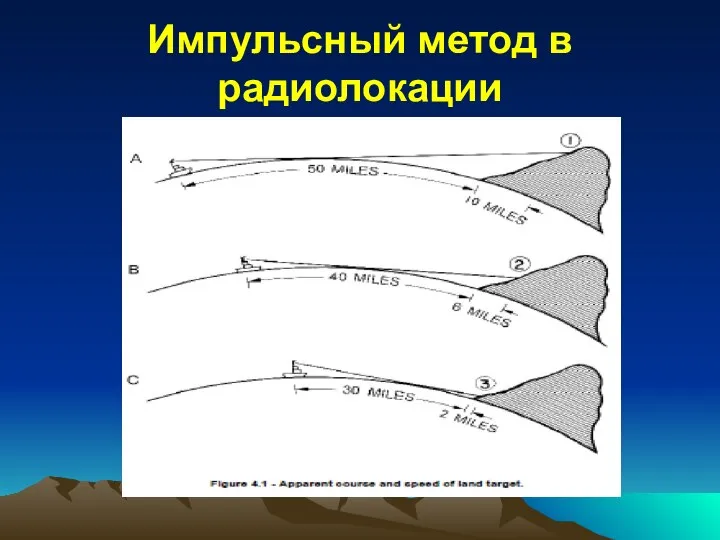
Импульсный метод в радиолокации
Импульсный метод в радиолокации
Состав и размещение приборов импульсной радиолокационной станции
Импульсная РЛС содержит следующие основные
Состав и размещение приборов импульсной радиолокационной станции
Импульсная РЛС содержит следующие основные
Комплекс РЛС «КЕLVIN HUGES» состоит из 3-х приборов:
Щелевой антенны совмещённой в
Комплекс РЛС «КЕLVIN HUGES» состоит из 3-х приборов:
Щелевой антенны совмещённой в
Основные эксплуатационные характеристики РЛС
Работа радиолокатора состоит из многих процессов, совокупность которых
Основные эксплуатационные характеристики РЛС
Работа радиолокатора состоит из многих процессов, совокупность которых
Направленность излучения
В судовых радиолокаторах применяются антенны самых различных конструкций, формирующие радиолокационный
Направленность излучения
В судовых радиолокаторах применяются антенны самых различных конструкций, формирующие радиолокационный
Длительность импульса
Радиоимпульс имеет два фронта: передний обращенный в сторону распространения, и
Длительность импульса
Радиоимпульс имеет два фронта: передний обращенный в сторону распространения, и
Ширина диаграммы направленности
Ширина диаграммы направленности в горизонтальной плоскости определяет разрешающую способность
Ширина диаграммы направленности
Ширина диаграммы направленности в горизонтальной плоскости определяет разрешающую способность
Мощность излучения и чувствительность приемника
Чем мощнее излучение и выше чувствительность приемника,
Мощность излучения и чувствительность приемника
Чем мощнее излучение и выше чувствительность приемника,
Частота следования импульсов и скорость вращения антенны
чтобы получить достаточно устойчивую отметку
Частота следования импульсов и скорость вращения антенны
чтобы получить достаточно устойчивую отметку
Параметры разверток и шкалы дальности
Масштаб развертки пропорционален скорости развертки, чем больше
Параметры разверток и шкалы дальности
Масштаб развертки пропорционален скорости развертки, чем больше
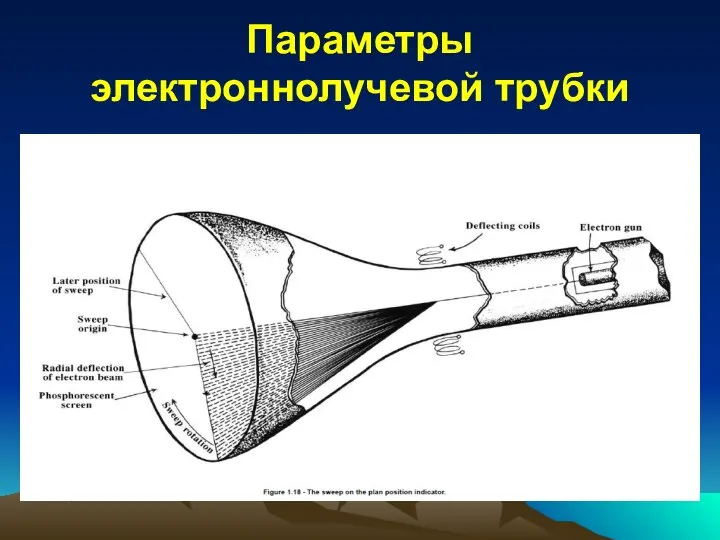
Параметры электроннолучевой трубки
Параметры электроннолучевой трубки
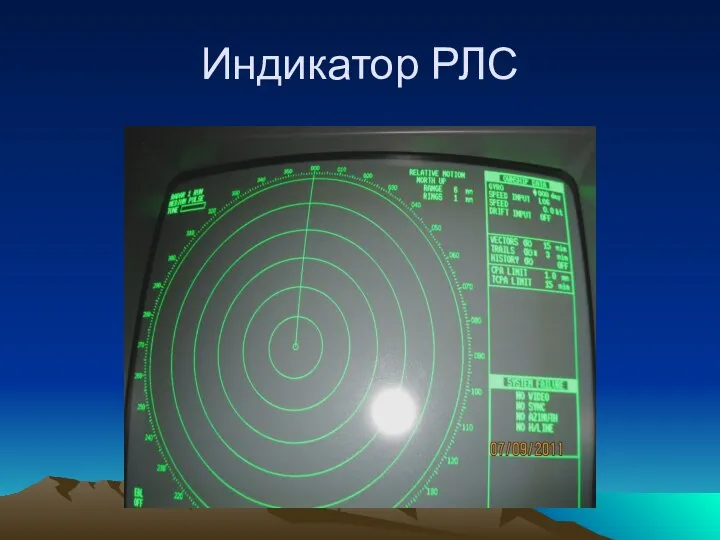
Индикатор РЛС
Индикатор РЛС
Влияние отражающих свойств объектов
Существенное влияние на эффективность отражения оказывает конфигурация отражающей
Влияние отражающих свойств объектов
Существенное влияние на эффективность отражения оказывает конфигурация отражающей
Радиолокационные маяки ответчики
Радиолокационный маяк ответчик (РМО) представляет собой устройство, при поступлении,
Радиолокационные маяки ответчики
Радиолокационный маяк ответчик (РМО) представляет собой устройство, при поступлении,

Радиолокационный маяк-ответчик (РЛМО)
(РЛМО) обеспечивает определение местоположения судов, терпящих бедствие, посредством
Радиолокационный маяк-ответчик (РЛМО)
(РЛМО) обеспечивает определение местоположения судов, терпящих бедствие, посредством
Влияние условий распространения радиоволн
Радиоволны сантиметрового диапазона при наиболее часто встречающемся состоянии
Влияние условий распространения радиоволн
Радиоволны сантиметрового диапазона при наиболее часто встречающемся состоянии
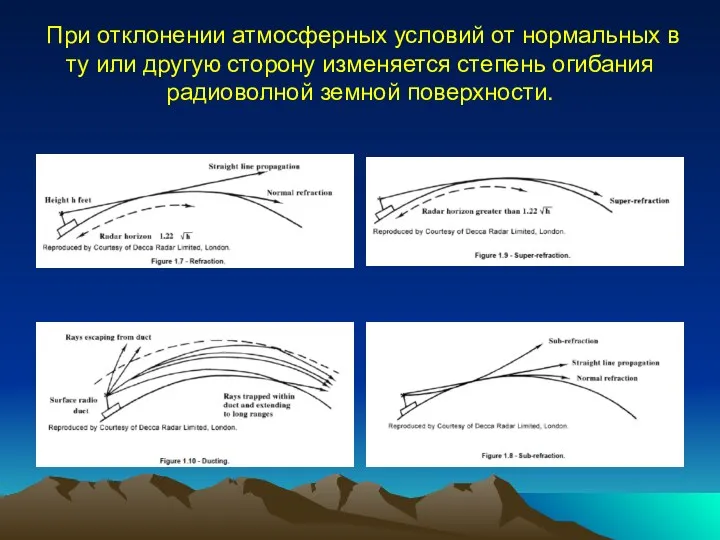
При отклонении атмосферных условий от нормальных в ту или другую сторону
При отклонении атмосферных условий от нормальных в ту или другую сторону
Помехи в работе РЛС
Источники помех можно разделить на два вида: реально
Помехи в работе РЛС
Источники помех можно разделить на два вида: реально
Ложные эхо-сигналы
Наличие на судне хорошо отражающих объектов может привести к
Ложные эхо-сигналы
Наличие на судне хорошо отражающих объектов может привести к
Минимальная дальность обнаружения
Минимальная дальность действия РЛС напрямую связана с понятием дислокационной
Минимальная дальность обнаружения
Минимальная дальность действия РЛС напрямую связана с понятием дислокационной
Мёртвая зона и теневые сектора РЛС
Мёртвая зона и теневые сектора РЛС

Мёртвая зона и теневые сектора
РЛС «Кеlvin Hages»
М Кбт
R1 36 0,7
R2
Мёртвая зона и теневые сектора
РЛС «Кеlvin Hages»
М Кбт
R1 36 0,7
R2
Разрешающая способность по дальности
Под разрешающей способностью станции по дальности (РСД) подразумевается
Разрешающая способность по дальности
Под разрешающей способностью станции по дальности (РСД) подразумевается
Разрешающая способность по направлению
Под разрешающей способностью станции по направлению подразумевается
Разрешающая способность по направлению
Под разрешающей способностью станции по направлению подразумевается
Режимы работы радиолокационной станции.
Частотный диапазон.
В случае двухканальной комплектации РЛС, имеется возможность
Режимы работы радиолокационной станции.
Частотный диапазон.
В случае двухканальной комплектации РЛС, имеется возможность
Шкала дальности
В современных РЛС используются различные шкалы дальности от 0.5 -
Шкала дальности
В современных РЛС используются различные шкалы дальности от 0.5 -

На этих шкалах предусмотрена возможность отображения истинного движения и смещения центра
На этих шкалах предусмотрена возможность отображения истинного движения и смещения центра
Режимы ориентации изображения
Навигационная обстановка определяет выбор ориентации изображения. Достоинство режима Head
Режимы ориентации изображения
Навигационная обстановка определяет выбор ориентации изображения. Достоинство режима Head
Режим «Trial»
Режим «Trial» позволяет проиграть на экране индикатора развитие ситуации расхождения.
Режим «Trial»
Режим «Trial» позволяет проиграть на экране индикатора развитие ситуации расхождения.
Мгновенное проигрывание маневра
в режиме ОД
В режиме ОД простейший вариант "мгновенной"
Мгновенное проигрывание маневра
в режиме ОД
В режиме ОД простейший вариант "мгновенной"
Мгновенная (а) и ускорен-
ная (б) имитация маневра
в ОД на экране САРП:
1
Мгновенная (а) и ускорен-
ная (б) имитация маневра
в ОД на экране САРП:
1
Режим «Охранной зоны»
«Охранная зона» - это установленные на экране, с помощью
Режим «Охранной зоны»
«Охранная зона» - это установленные на экране, с помощью


Зона автоматического захвата и барьерные линии на экране САРП:
Все САРП, отвечающие
Зона автоматического захвата и барьерные линии на экране САРП:
Все САРП, отвечающие
РЕЖИМ СТАБИЛИЗАЦИИ
Относительное
Движение
RM – ОД. Решение о выборе того или
РЕЖИМ СТАБИЛИЗАЦИИ
Относительное
Движение
RM – ОД. Решение о выборе того или
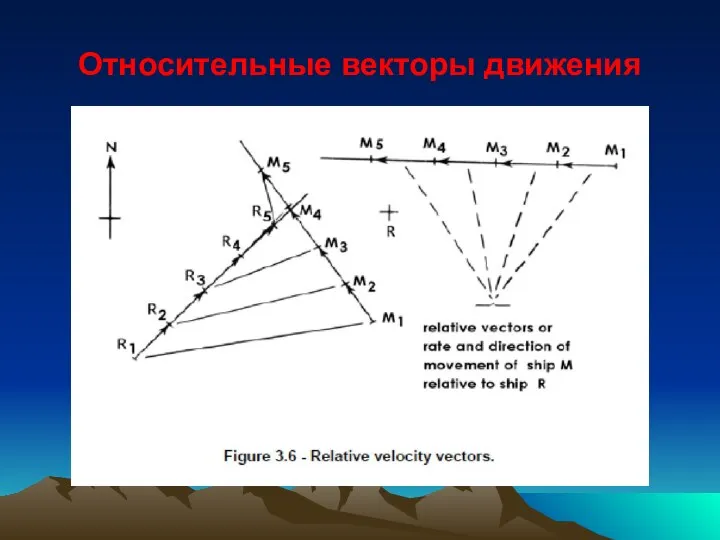
Относительные векторы движения
Относительные векторы движения

Оценка
наличия опасности столкновения
Оценка
наличия опасности столкновения

Эффект при изменении курса в режиме ОД - RM
Эффект при изменении курса в режиме ОД - RM
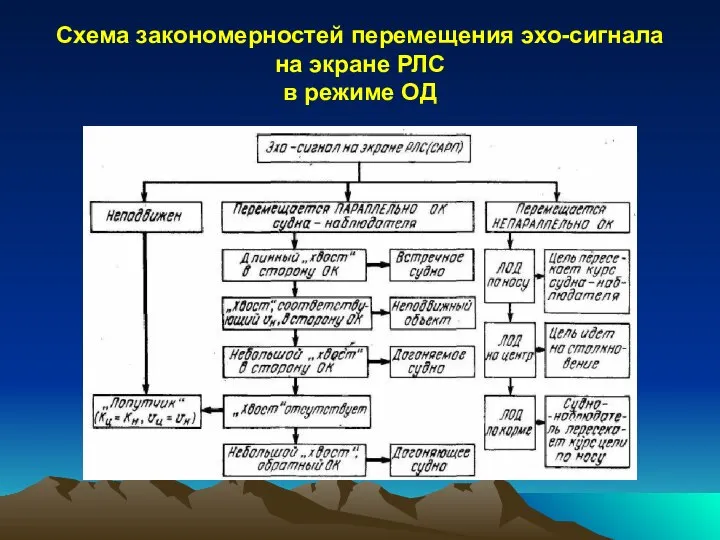
Схема закономерностей перемещения эхо-сигнала на экране РЛС
в режиме ОД
Схема закономерностей перемещения эхо-сигнала на экране РЛС
в режиме ОД
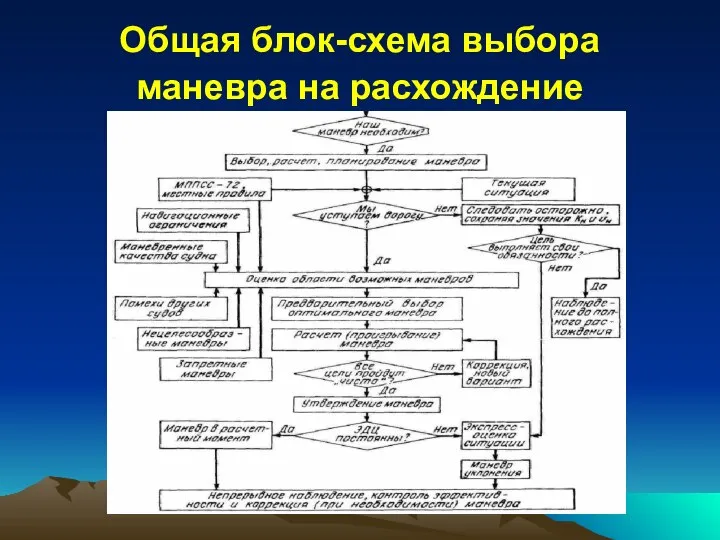
Общая блок-схема выбора маневра на расхождение
Общая блок-схема выбора маневра на расхождение
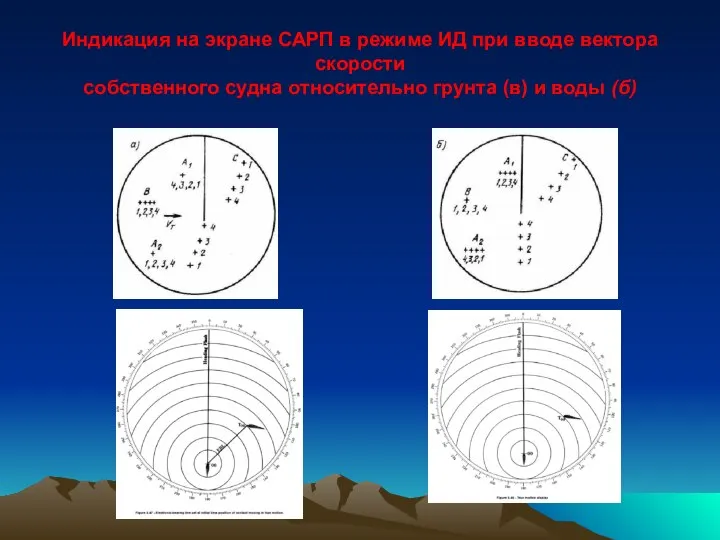
Индикация на экране САРП в режиме ИД при вводе вектора скорости
собственного
Индикация на экране САРП в режиме ИД при вводе вектора скорости собственного
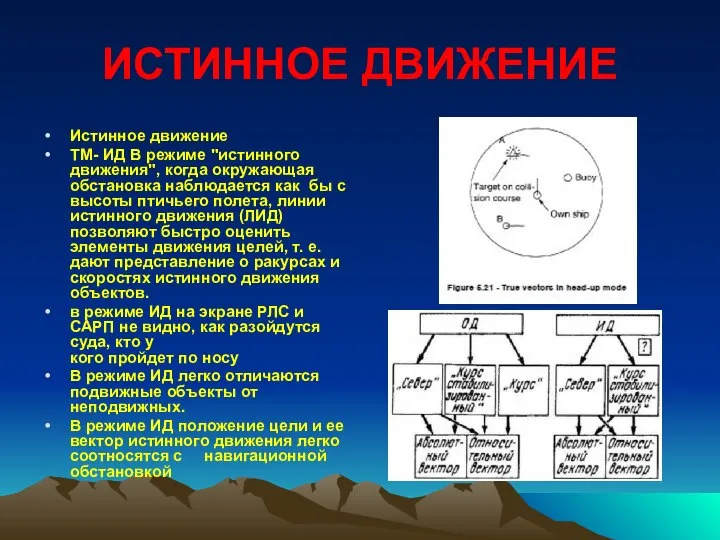
ИСТИННОЕ ДВИЖЕНИЕ
Истинное движение
TM- ИД В режиме "истинного движения", когда окружающая обстановка
ИСТИННОЕ ДВИЖЕНИЕ
Истинное движение
TM- ИД В режиме "истинного движения", когда окружающая обстановка
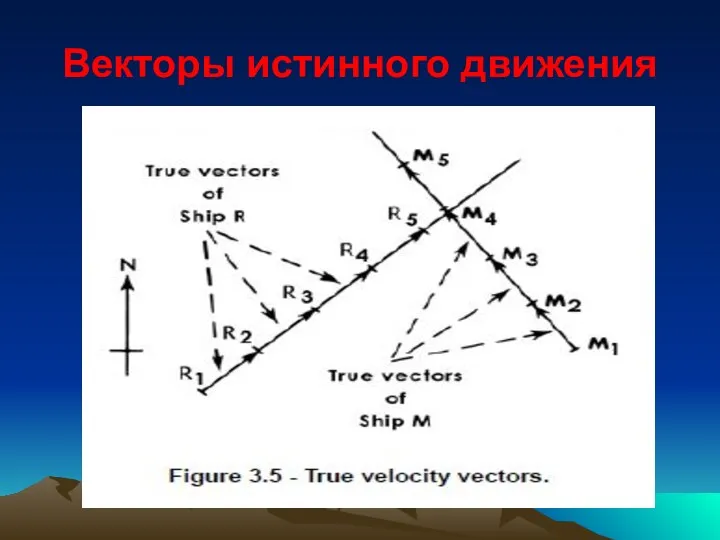
Векторы истинного движения
Векторы истинного движения
Радиолокационное определение места судна
Судовые РЛС служат для обеспечения безопасности мореплавания в
Радиолокационное определение места судна
Судовые РЛС служат для обеспечения безопасности мореплавания в
Определение места судна
Радиолокатор – навигационное устройство ближнего действия, дополняющее спутниковые системы,
Определение места судна
Радиолокатор – навигационное устройство ближнего действия, дополняющее спутниковые системы,

Использование радиолокатора для расхождения
Организация радиолокационного наблюдения: « наблюдай – анализируй ситуацию–действуй».
Использование радиолокатора для расхождения
Организация радиолокационного наблюдения: « наблюдай – анализируй ситуацию–действуй».
Общие принципы организации наблюдения
ситуации, в которых использование РЛС является обязательным:
при плавании
Общие принципы организации наблюдения
ситуации, в которых использование РЛС является обязательным:
при плавании
Наблюдение и обнаружение целей.
Обработка радиолокационной информации включает определенную последовательность действий:
Наблюдение и обнаружение целей.
Обработка радиолокационной информации включает определенную последовательность действий:
ИСПОЛЬЗОВАНИЕ РАДИОЛОКАТОРА ДЛЯ РАСХОЖДЕНИЯ
Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется
ИСПОЛЬЗОВАНИЕ РАДИОЛОКАТОРА ДЛЯ РАСХОЖДЕНИЯ
Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется
Глазомерная оценка радиолокационной ситуации
Глазомерная оценка является обязательным этапом обработки радиолокационной информации
Глазомерная оценка радиолокационной ситуации
Глазомерная оценка является обязательным этапом обработки радиолокационной информации
Система автоматической радиолокационной прокладки (САРП)
Требования ИМО к РЛС и САРП
СЭП (EPA)
Система автоматической радиолокационной прокладки (САРП)
Требования ИМО к РЛС и САРП
СЭП (EPA)

Основные функции САРП
Средства автоматической радиолокационной прокладки (САРП) — это радиолокационные информационно-вычислительные
Основные функции САРП
Средства автоматической радиолокационной прокладки (САРП) — это радиолокационные информационно-вычислительные
Управление системой САРП
После включения системы в центре экрана появится надпись:
RADAR WARMING
Управление системой САРП
После включения системы в центре экрана появится надпись:
RADAR WARMING
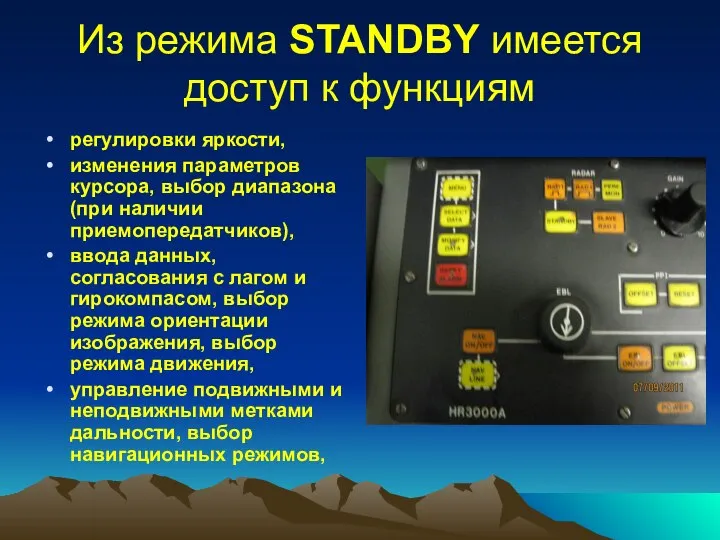
Из режима STANDBY имеется доступ к функциям
регулировки яркости,
изменения параметров курсора,
Из режима STANDBY имеется доступ к функциям
регулировки яркости,
изменения параметров курсора,
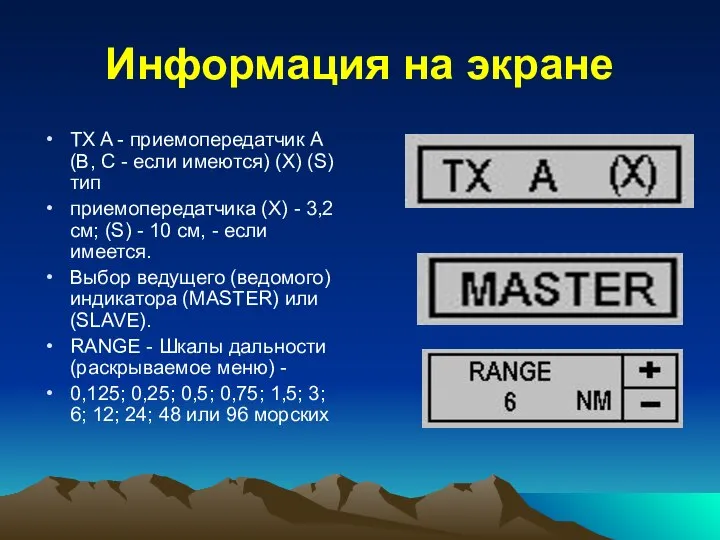
Информация на экране
TX A - приемопередатчик А (В, С -
Информация на экране
TX A - приемопередатчик А (В, С -
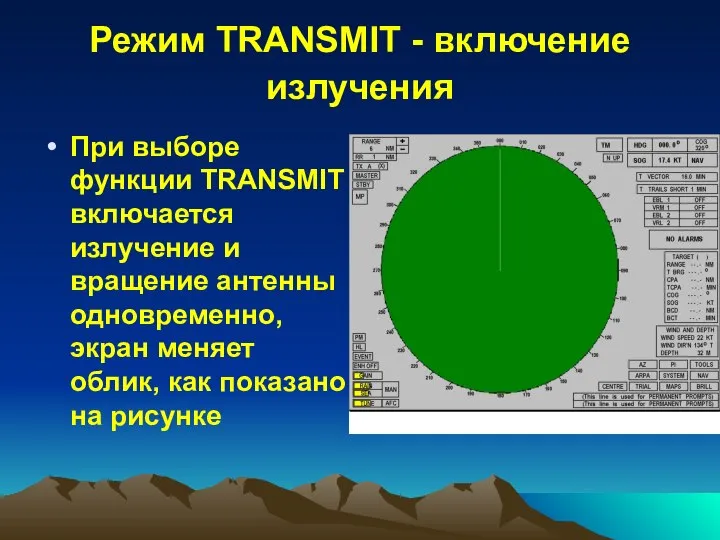
Режим TRANSMIT - включение излучения
При выборе функции TRANSMIT включается излучение
Режим TRANSMIT - включение излучения
При выборе функции TRANSMIT включается излучение
Настройка видеосигнала
ENH OFF - включение ON и выключение OFF
дополнительного усиления.
GAIN -
Настройка видеосигнала
ENH OFF - включение ON и выключение OFF
дополнительного усиления.
GAIN -
Сравнение характеристик 3- и 10-сантиметровых диапазонов радиоволн
мощность отраженного сигнала (для одинаковой
Сравнение характеристик 3- и 10-сантиметровых диапазонов радиоволн
мощность отраженного сигнала (для одинаковой
Настройка яркости изображения на экране монитора
BRILL
DAY
NIGHT1, NIGHT2, NIGHT3
Настройка яркости изображения на экране монитора
BRILL
DAY
NIGHT1, NIGHT2, NIGHT3
Режимы навигационного использования
Режим "Проигрывание маневра" - проигрывание одного или двух
Режимы навигационного использования
Режим "Проигрывание маневра" - проигрывание одного или двух
Дополнительные функциональные возможности САРП
автоматическое обнаружение эхо-сигналов надводных целей;
ручной или автоматический
Дополнительные функциональные возможности САРП
автоматическое обнаружение эхо-сигналов надводных целей;
ручной или автоматический
Основные ограничения САРП
Ни одно из существующих САРП не обеспечивает гарантированного обнаружения
Основные ограничения САРП
Ни одно из существующих САРП не обеспечивает гарантированного обнаружения
Погрешности вычисленных элементов движения цели
истинный курс цели — ±5—7°;
истинная скорость
Погрешности вычисленных элементов движения цели
истинный курс цели — ±5—7°;
истинная скорость
Использование САРП при расхождении судов
Полная оценка ситуации возможна только с помощью
Использование САРП при расхождении судов
Полная оценка ситуации возможна только с помощью
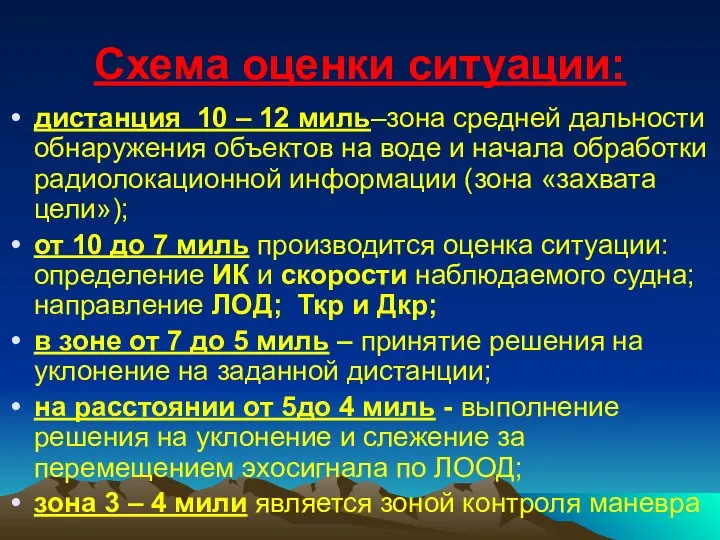
Схема оценки ситуации:
дистанция 10 – 12 миль–зона средней дальности обнаружения объектов
Схема оценки ситуации:
дистанция 10 – 12 миль–зона средней дальности обнаружения объектов
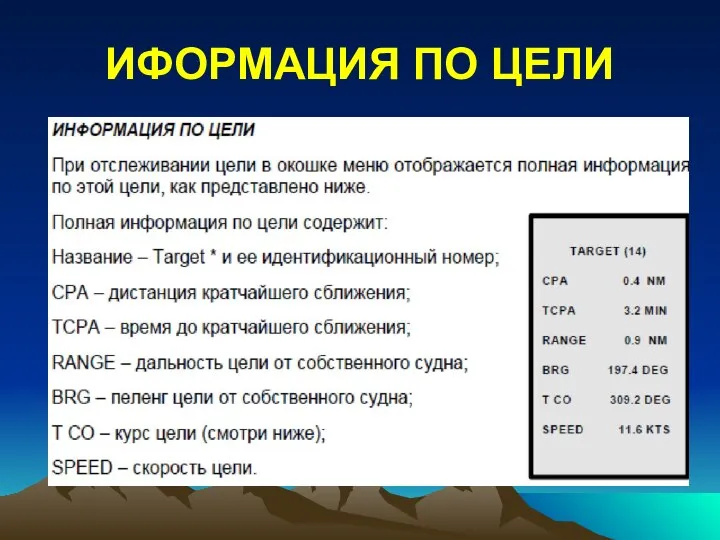
ИФОРМАЦИЯ ПО ЦЕЛИ
ИФОРМАЦИЯ ПО ЦЕЛИ
Использование САРП при расхождении судов
Полная оценка ситуации возможна только с помощью
Использование САРП при расхождении судов
Полная оценка ситуации возможна только с помощью
Выбор маневра
Выбор маневра для безопасного расхождения надлежит осуществлять заблаговременно и
Выбор маневра
Выбор маневра для безопасного расхождения надлежит осуществлять заблаговременно и
Контроль эффективности маневра
При выполнении маневра необходимо внимательно следить за векторами
Контроль эффективности маневра
При выполнении маневра необходимо внимательно следить за векторами
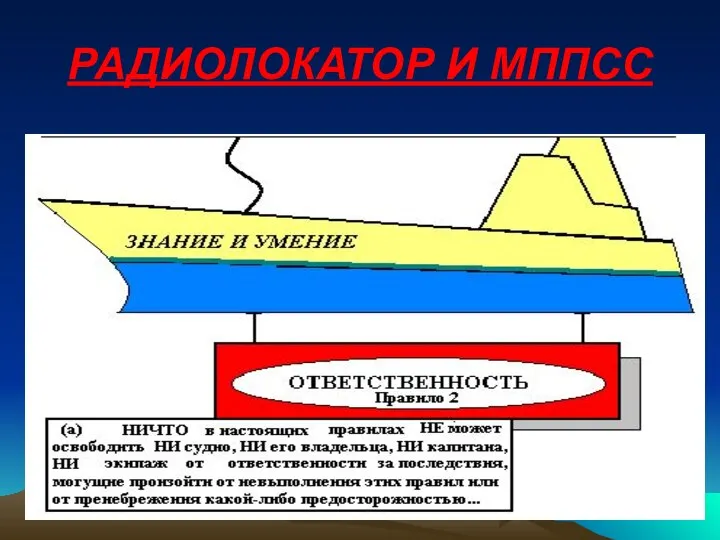
РАДИОЛОКАТОР И МППСС
РАДИОЛОКАТОР И МППСС
ПРАВИЛО 5. Н А Б Л Ю Д Е Н И
ПРАВИЛО 5. Н А Б Л Ю Д Е Н И

ПРАВИЛО 6. БЕЗОПАСНАЯ СКОРОСТЬ
каждое судно должно ВСЕГДА следовать с безопасной
ПРАВИЛО 6. БЕЗОПАСНАЯ СКОРОСТЬ каждое судно должно ВСЕГДА следовать с безопасной

ПРАВИЛО 7. ОПАСНОСТЬ СТОЛКНОВЕНИЯ
Правило 7 (а) рекомендует в случае
ПРАВИЛО 7. ОПАСНОСТЬ СТОЛКНОВЕНИЯ
Правило 7 (а) рекомендует в случае

ПРАВИЛО 8. ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ
Правило 8 применяется при
ПРАВИЛО 8. ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ
Правило 8 применяется при
Действия при изменении КУРСА судна.
“ЛЮБОЕ изменение курса ... должно быть
Действия при изменении КУРСА судна.
“ЛЮБОЕ изменение курса ... должно быть
Действия при изменении КУРСА судна.
«... Следует ИЗБЕГАТЬ:
(i) изменения курса ВЛЕВО, если
Действия при изменении КУРСА судна.
«... Следует ИЗБЕГАТЬ:
(i) изменения курса ВЛЕВО, если

Действия при изменении СКОРОСТИ судна
«ЛЮБОЕ изменение ...СКОРОСТИ... должно быть достаточно большим
Действия при изменении СКОРОСТИ судна
«ЛЮБОЕ изменение ...СКОРОСТИ... должно быть достаточно большим
При определении наличия опасности столкновения необходимо, прежде всего, учитывать следующее:
опасность столкновения
При определении наличия опасности столкновения необходимо, прежде всего, учитывать следующее:
опасность столкновения
ТРЕБОВАНИЯ ПДНВ Демонстрация профессиональных навыков.
Знание принципов радиолокации, умение пользоваться радиолокатором, расшифровывать
ТРЕБОВАНИЯ ПДНВ Демонстрация профессиональных навыков.
Знание принципов радиолокации, умение пользоваться радиолокатором, расшифровывать
SOLAS -74
Требования к оснащению судов навигационными системами и оборудованием
Все
SOLAS -74
Требования к оснащению судов навигационными системами и оборудованием
Все
ПРАВИЛО 19. ПЛАВАНИЕ СУДОВ ПРИ ОГРАНИЧЕННОЙ ВИДИМОСТИ
Термин «ограниченная видимость» означает
ПРАВИЛО 19. ПЛАВАНИЕ СУДОВ ПРИ ОГРАНИЧЕННОЙ ВИДИМОСТИ
Термин «ограниченная видимость» означает
Задачи, решаемые САРП
САРП решает следующие основные задачи :
отображение на экране
Задачи, решаемые САРП
САРП решает следующие основные задачи :
отображение на экране

ИСПОЛЬЗОВАНИЕ САРП ПРИ РАСХОЖДЕНИИ
Внедрение средств автоматической радиолокационной прокладки (САРП) позволяет освободить
ИСПОЛЬЗОВАНИЕ САРП ПРИ РАСХОЖДЕНИИ
Внедрение средств автоматической радиолокационной прокладки (САРП) позволяет освободить
 rabota_poezdnogo_dispetchera_0
rabota_poezdnogo_dispetchera_0 Kiy – miracle island
Kiy – miracle island 20140301_muzyka_v_khrame
20140301_muzyka_v_khrame Самый радостный и светлый праздник - пасха
Самый радостный и светлый праздник - пасха Шұжық өнімдері және тұзды өнімдердің, жартылай фабрикаттардың және дайын өнім өндірісі. (Дәріс 11)
Шұжық өнімдері және тұзды өнімдердің, жартылай фабрикаттардың және дайын өнім өндірісі. (Дәріс 11) Индустриальное общество новые проблемы и новые ценности
Индустриальное общество новые проблемы и новые ценности Подготовка инструмента к работе
Подготовка инструмента к работе Базирование
Базирование 20130614_etika_obshcheniya_v_seme
20130614_etika_obshcheniya_v_seme Встречные забои
Встречные забои ООО Проектно-строительная корпорация Глориус
ООО Проектно-строительная корпорация Глориус Личные местоимения
Личные местоимения ОВЧ-547 Приспособление для наведения боковых задвижек ФА под струей
ОВЧ-547 Приспособление для наведения боковых задвижек ФА под струей ответственность
ответственность Транзисторные ключи
Транзисторные ключи Метагалактика
Метагалактика Медицинская электроника
Медицинская электроника Самая красивая деревня во Владимирской области
Самая красивая деревня во Владимирской области Буктрейлер по книге Атлант расправил плечи
Буктрейлер по книге Атлант расправил плечи 20141213_prezentatsiya
20141213_prezentatsiya 20131020_povtorenie_dat_7_klass
20131020_povtorenie_dat_7_klass Транспортная инфпаструктура. Транспортный комплекс
Транспортная инфпаструктура. Транспортный комплекс 3 Kuņģa slimības
3 Kuņģa slimības 1 Краса i багатство української мови
1 Краса i багатство української мови За нас, за тебя и за твой юбилей
За нас, за тебя и за твой юбилей васкулит павлодар
васкулит павлодар Выпуск 1976 года 10а класс. Фотоальбом
Выпуск 1976 года 10а класс. Фотоальбом Волоконно-оптический кабель
Волоконно-оптический кабель