- Конструкции и принципы работы микромеханических приборов. Гироскопы

Содержание
- 2. Гироско́п (от др.-греч. γῦρος — круг + σκοπέω — смотрю) — устройство, способное реагировать на изменение
- 3. Основные определения Микромеханические, или микрогироскопы (МГ), являются электромеханическими системами, в которых энергия вынужденных (первичных) колебаний инерционной
- 4. Классификационные признаки микрогироскопов Число измерительных осей Число инерционных масс Тип подвеса Наличие кинематических связей Вид перемещения
- 5. Основные определения
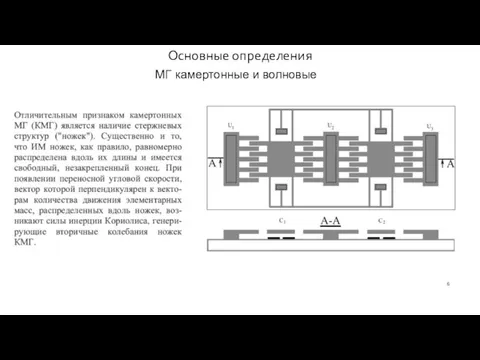
- 6. Основные определения МГ камертонные и волновые
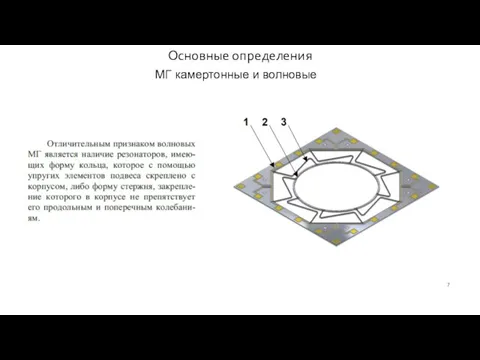
- 7. Основные определения МГ камертонные и волновые
- 8. Основные определения Типовые характеристиками МГ Диапазон измерений Чувствительность Полоса пропускания частот Масштабный коэффициент и его стабильность
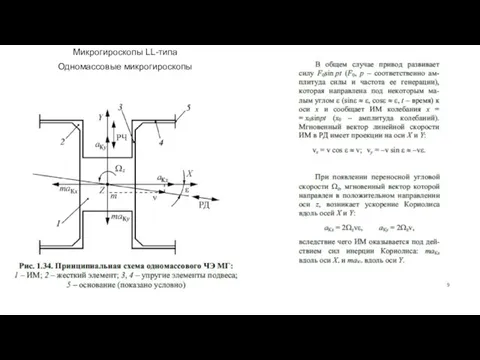
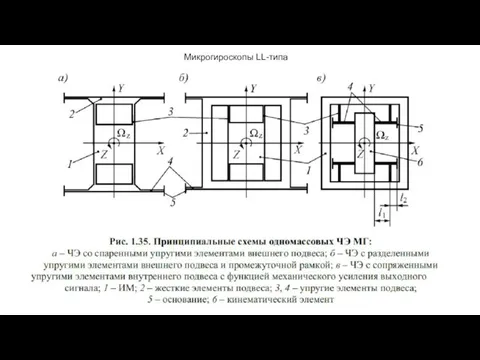
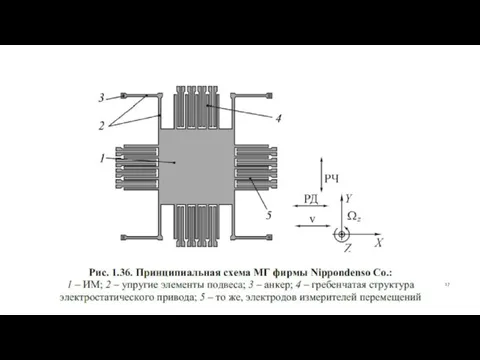
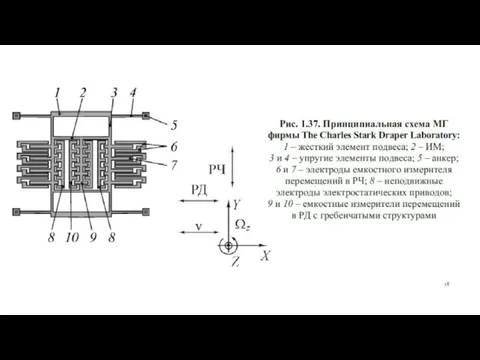
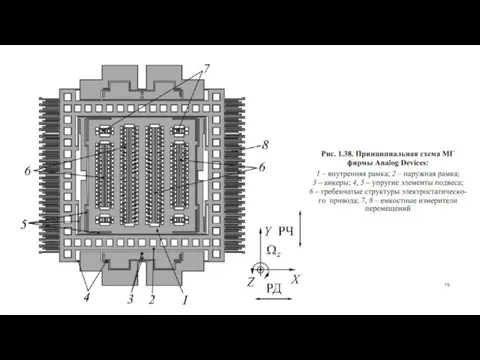
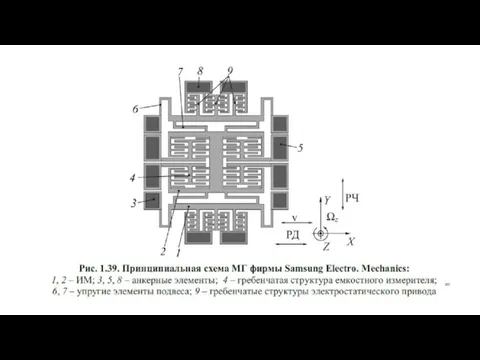
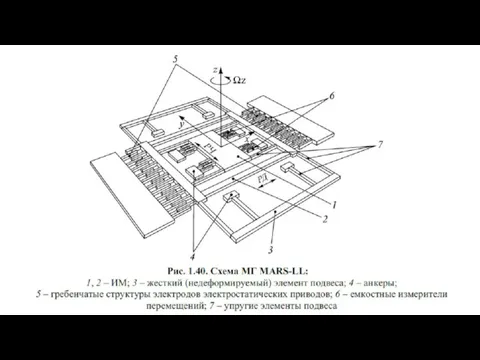
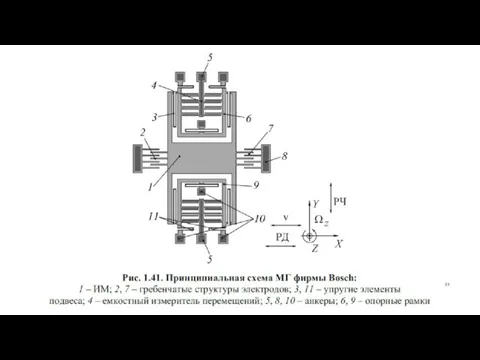
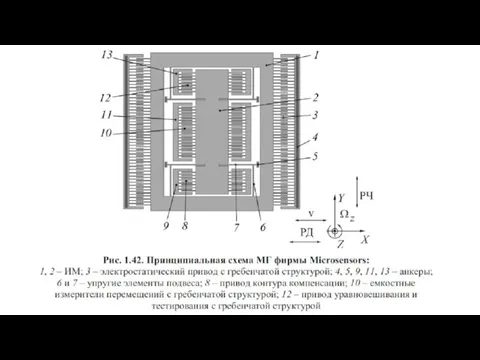
- 9. Микрогироскопы LL-типа Одномассовые микрогироскопы
- 10. Микрогироскопы LL-типа Одномассовые микрогироскопы
- 11. Микрогироскопы LL-типа
- 12. Микрогироскопы LL-типа
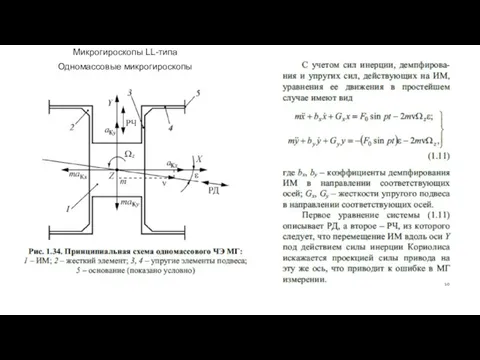
- 14. Микрогироскопы LL-типа
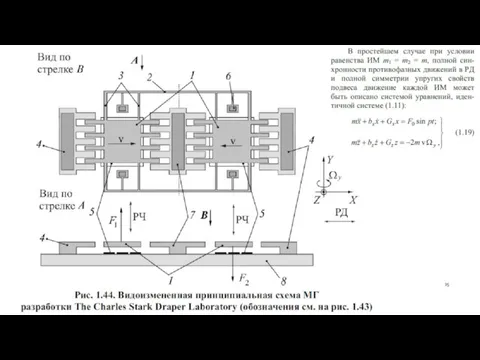
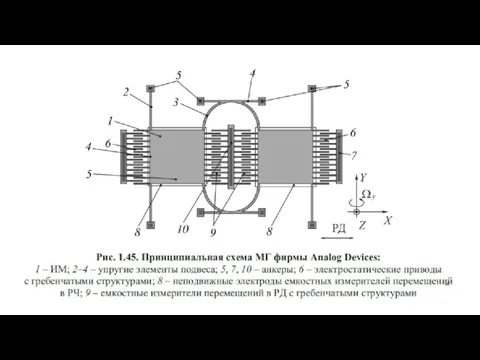
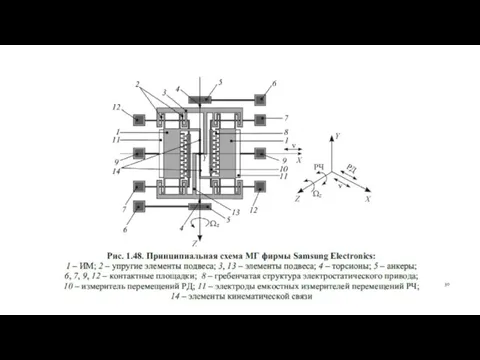
- 24. Двухмассовые микрогироскопы Микрогироскопы LL-типа
- 27. Микрогироскопы LR-типа
- 32. Микрогироскопы RR-типа
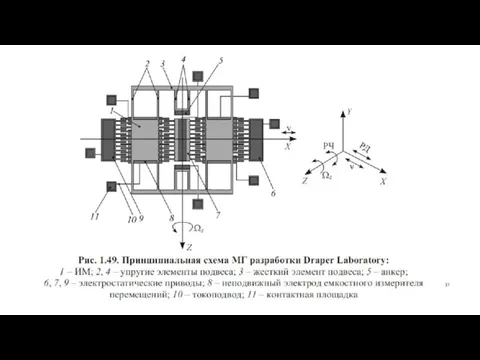
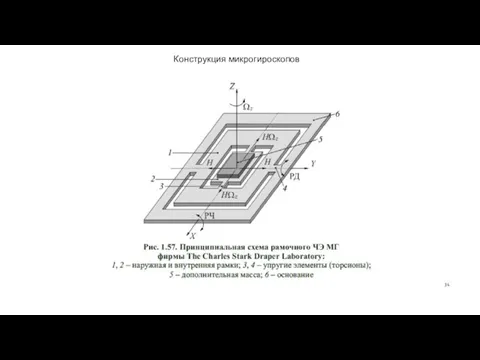
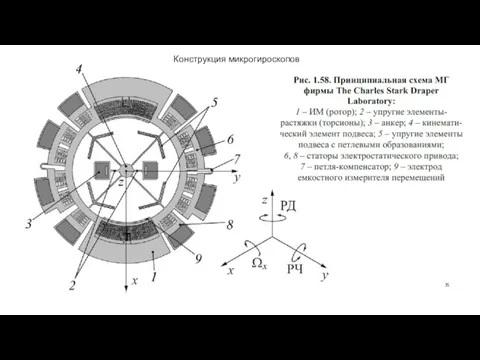
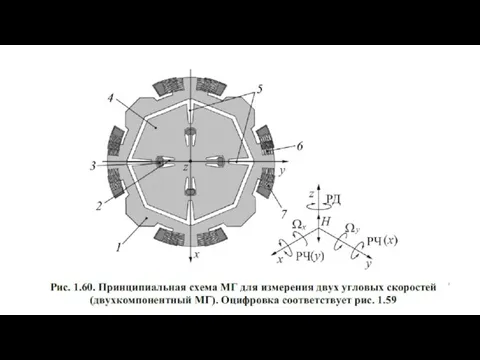
- 34. Конструкция микрогироскопов
- 35. Конструкция микрогироскопов
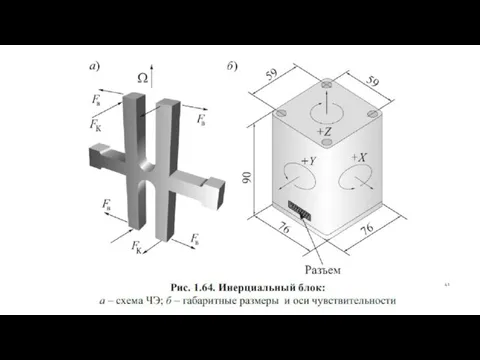
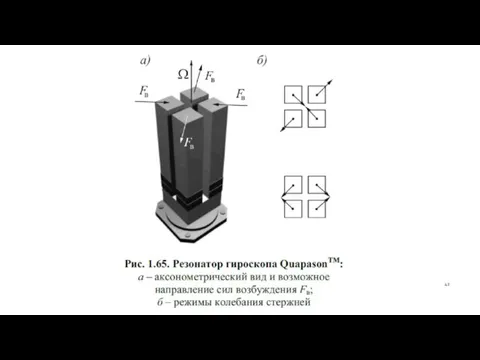
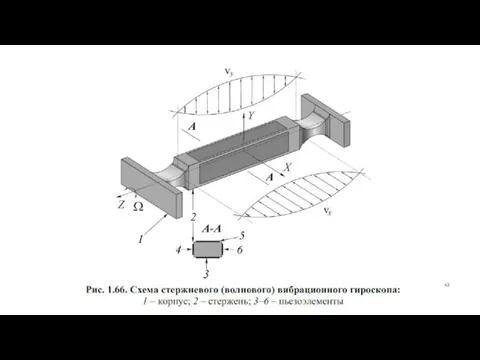
- 40. Камертонные и волновые микрогироскопы
- 45. Скачать презентацию
Гироско́п (от др.-греч. γῦρος — круг + σκοπέω — смотрю) — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительноинерциальной
Гироско́п (от др.-греч. γῦρος — круг + σκοπέω — смотрю) — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительноинерциальной
Основные определения
Микромеханические, или микрогироскопы (МГ), являются электромеханическими системами, в которых энергия
Основные определения
Микромеханические, или микрогироскопы (МГ), являются электромеханическими системами, в которых энергия
Классификационные признаки микрогироскопов
Число измерительных осей
Число инерционных масс
Тип подвеса
Наличие кинематических связей
Вид перемещения
Классификационные признаки микрогироскопов
Число измерительных осей
Число инерционных масс
Тип подвеса
Наличие кинематических связей
Вид перемещения
Основные определения
Основные определения
Основные определения
МГ камертонные и волновые
Основные определения
МГ камертонные и волновые
Основные определения
МГ камертонные и волновые
Основные определения
МГ камертонные и волновые

Основные определения
Типовые характеристиками МГ
Диапазон измерений
Чувствительность
Полоса пропускания частот
Масштабный коэффициент и
Основные определения
Типовые характеристиками МГ
Диапазон измерений
Чувствительность
Полоса пропускания частот
Масштабный коэффициент и
Микрогироскопы LL-типа
Одномассовые микрогироскопы
Микрогироскопы LL-типа
Одномассовые микрогироскопы
Микрогироскопы LL-типа
Одномассовые микрогироскопы
Микрогироскопы LL-типа
Одномассовые микрогироскопы
Микрогироскопы LL-типа
Микрогироскопы LL-типа

Микрогироскопы LL-типа
Микрогироскопы LL-типа


Микрогироскопы LL-типа
Микрогироскопы LL-типа


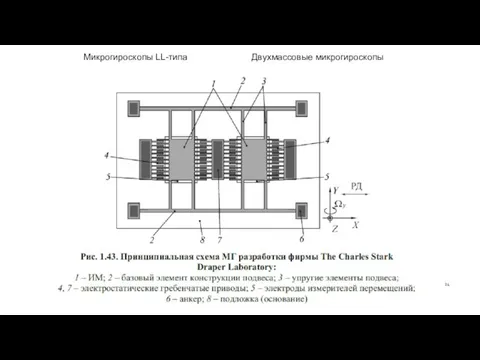
Двухмассовые микрогироскопы
Микрогироскопы LL-типа
Двухмассовые микрогироскопы
Микрогироскопы LL-типа

Микрогироскопы LR-типа
Микрогироскопы LR-типа



Микрогироскопы RR-типа
Микрогироскопы RR-типа

Конструкция микрогироскопов
Конструкция микрогироскопов
Конструкция микрогироскопов
Конструкция микрогироскопов

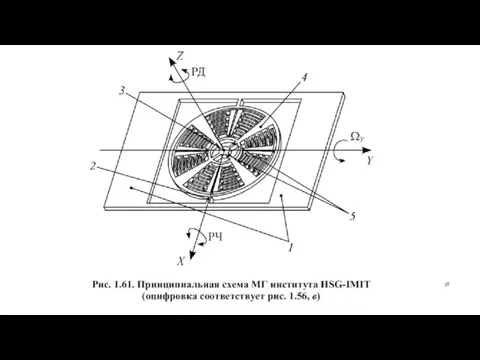
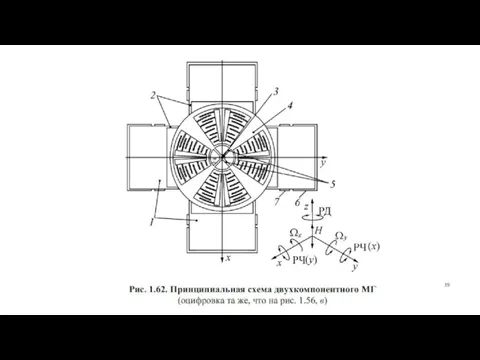
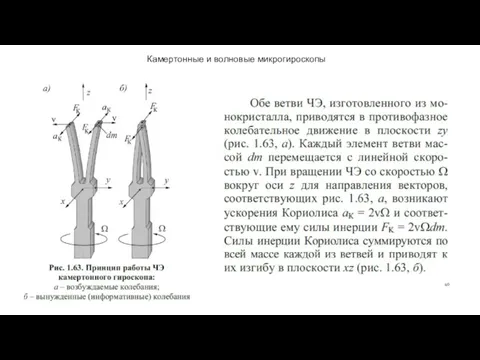
Камертонные и волновые микрогироскопы
Камертонные и волновые микрогироскопы
 Судова практика визнання недійсними результатів торгів через незаконні дії організаторів
Судова практика визнання недійсними результатів торгів через незаконні дії організаторів Мұнайды гидроөңдеу процестері. Катализаторлары
Мұнайды гидроөңдеу процестері. Катализаторлары Бытовые электроинструменты
Бытовые электроинструменты Проблема отношений к сайтам знакомств
Проблема отношений к сайтам знакомств Анонс конкурса Каким я вижу предприятие
Анонс конкурса Каким я вижу предприятие Работа_в_REDMINE
Работа_в_REDMINE Литературная игра Загадки Василисы Премудрой
Литературная игра Загадки Василисы Премудрой Предупрежден – значит вооружен
Предупрежден – значит вооружен Физкультурно-оздоровительные технологии как средство профилактики нарушения осанки у детей с ОВЗ
Физкультурно-оздоровительные технологии как средство профилактики нарушения осанки у детей с ОВЗ Закономерности строения геологических чечевиц Головкинского
Закономерности строения геологических чечевиц Головкинского Норма и вопрос в юридической теории и практике
Норма и вопрос в юридической теории и практике Живые системы и экосистемы
Живые системы и экосистемы Пособие для игр Разноцветные резиночки
Пособие для игр Разноцветные резиночки кл немuser_file_5721fada847f0
кл немuser_file_5721fada847f0 ПРОФИЛАКТИКА природоохрана
ПРОФИЛАКТИКА природоохрана Τρίτο μάθημα. Посвящается году Греции в России
Τρίτο μάθημα. Посвящается году Греции в России “Лялька Барбі”
“Лялька Барбі” F-F 1
F-F 1 Электронная сигарета
Электронная сигарета Влияние колокольного звона на организм человека
Влияние колокольного звона на организм человека 20150202_rodina
20150202_rodina Презентация Сенсорика 7 новая
Презентация Сенсорика 7 новая Музыкальная живопись и живописная музыка
Музыкальная живопись и живописная музыка Ukrainian Manufacturing Company 2019
Ukrainian Manufacturing Company 2019 Оригами. Животные зоопарка. Одна основа, а сколько фигурок?
Оригами. Животные зоопарка. Одна основа, а сколько фигурок? Використання над’яскравих світлодіодів в енергозберігаючих установках
Використання над’яскравих світлодіодів в енергозберігаючих установках Экологические аспекты укрепления и стабилизации грунтов под основание автомобильных дорог
Экологические аспекты укрепления и стабилизации грунтов под основание автомобильных дорог Жители и депутаты ЗакС за сохранение Старопарголовского квартала: против многоэтажного строительства у парка Сосновка
Жители и депутаты ЗакС за сохранение Старопарголовского квартала: против многоэтажного строительства у парка Сосновка