- Машины постоянного тока. Назначение, области применения и устройство машин постоянного тока

Содержание
- 2. Назначение и области применения машин постоянного тока Машины постоянного тока (МПТ) являются обратимыми, т. е. они
- 3. Машины постоянного тока унифицированы. Выпускаются двигатели серий 2П и 4П в диапазоне мощностей от 0,37 до
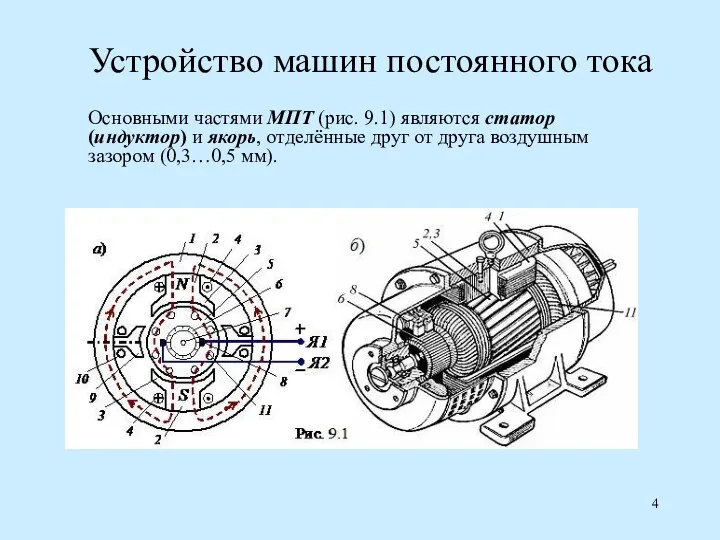
- 4. Устройство машин постоянного тока Основными частями МПТ (рис. 9.1) являются статор (индуктор) и якорь, отделённые друг
- 5. Статор (индуктор) - это стальной цилиндр 1, внутри которого крепятся главные полюса 2 с полюсными наконечниками
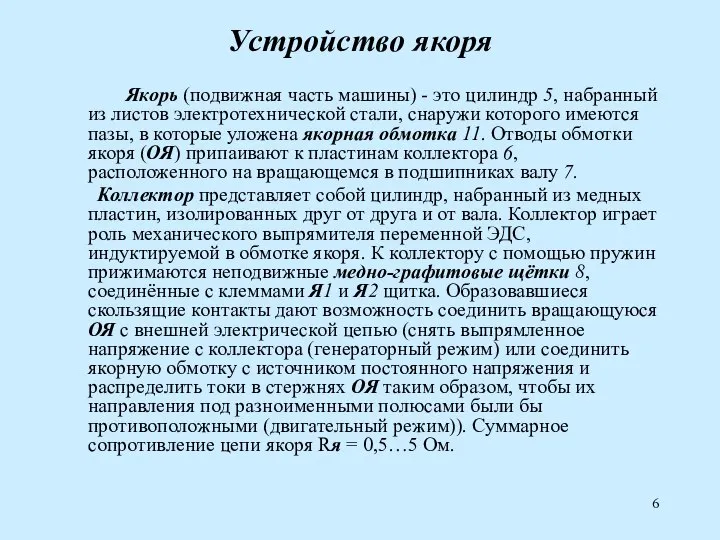
- 6. Устройство якоря Якорь (подвижная часть машины) - это цилиндр 5, набранный из листов электротехнической стали, снаружи
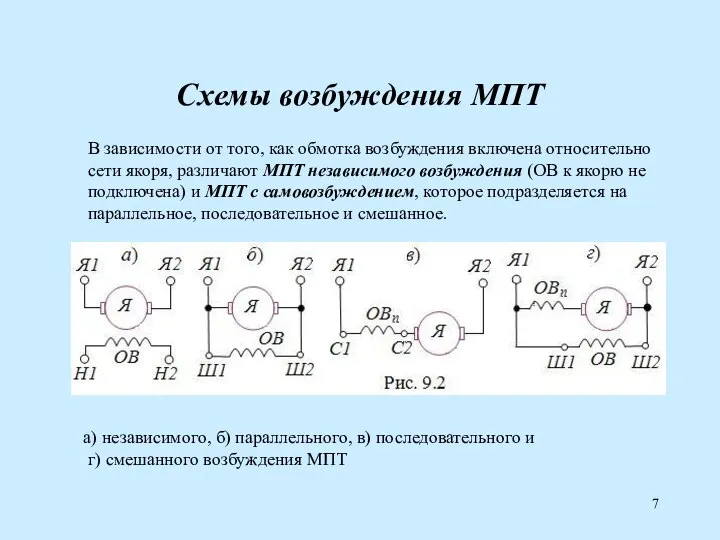
- 7. Схемы возбуждения МПТ В зависимости от того, как обмотка возбуждения включена относительно сети якоря, различают МПТ
- 8. Принцип работы генератора постоянного тока Генератор преобразует механическую энергию первичного двигателя в электрическую энергию. Принцип работы
- 9. Характеристика холостого хода Eя = Ux = f(Iв) (n = const; I = 0) снимается при
- 10. ГПТ независимого возбуждения и его характеристики схема характеристики: холостого хода внешняя регулировочная
- 11. Принцип работы двигателей постоянного тока В основе работы двигателя постоянного тока (ДПТ) - преобразователя электрической энергии
- 12. Уравнение электрического равновесия для якорной обмотки выглядит следующим образом: U = Eя + UяIя , где
- 13. Двигатели постоянного тока (ДПТ) параллельного возбуждения В этих двигателях обмотка возбуждения ОВ подключена параллельно с обмоткой
- 14. В начальный момент пуска ДПТ частота вращения якоря n = 0, по-этому противо-ЭДС Ея = 0
- 15. Электромеханические свойства ДПТ определяются его скоростной n(Iя) или механической n(M) характеристиками. Скоростная характеристика представляет зависимость частоты
- 16. Механическая характеристика n(M) представляет зависимость частоты вращения якоря n от развиваемого ДПТ момента М = Мс
- 17. Естественная механическая характеристика n(M) ДПТ параллельного возбуждения является жесткой, т. к. снижение частоты вращения n при
- 18. Пуск ДПТ Прямой пуск двигателя (Rп = 0) применяют только для двигателей малой мощности (до 1
- 19. При пуске двигателей большой мощности использование пускового реостата (из-за его громоздкости и значительных потерь энергии) становится
- 21. Скачать презентацию
Назначение и области применения машин постоянного тока
Машины постоянного тока (МПТ)
Назначение и области применения машин постоянного тока
Машины постоянного тока (МПТ)
Машины постоянного тока унифицированы.
Выпускаются двигатели серий 2П и 4П
Машины постоянного тока унифицированы.
Выпускаются двигатели серий 2П и 4П
Устройство машин постоянного тока
Основными частями МПТ (рис. 9.1) являются статор
Устройство машин постоянного тока
Основными частями МПТ (рис. 9.1) являются статор
Статор (индуктор) - это стальной цилиндр 1, внутри которого крепятся
Статор (индуктор) - это стальной цилиндр 1, внутри которого крепятся
Устройство якоря
Якорь (подвижная часть машины) - это цилиндр 5, набранный
Устройство якоря
Якорь (подвижная часть машины) - это цилиндр 5, набранный
Схемы возбуждения МПТ
В зависимости от того, как обмотка возбуждения включена
Схемы возбуждения МПТ
В зависимости от того, как обмотка возбуждения включена
Принцип работы генератора постоянного тока
Генератор преобразует механическую энергию первичного
Принцип работы генератора постоянного тока
Генератор преобразует механическую энергию первичного
Характеристика холостого хода
Eя = Ux = f(Iв) (n = const;
Характеристика холостого хода
Eя = Ux = f(Iв) (n = const;
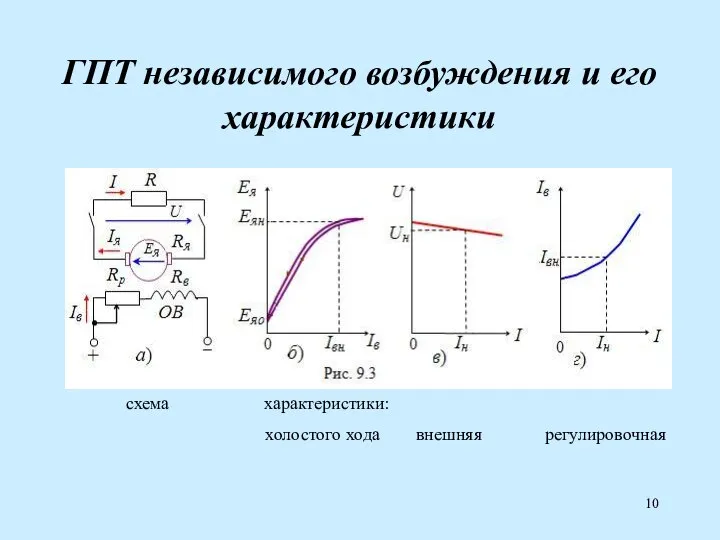
ГПТ независимого возбуждения и его характеристики
схема характеристики:
холостого хода внешняя
ГПТ независимого возбуждения и его характеристики
схема характеристики:
холостого хода внешняя
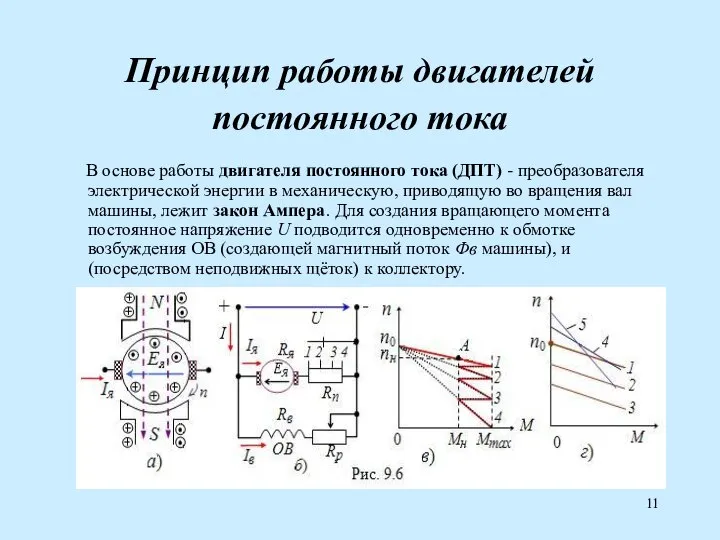
Принцип работы двигателей постоянного тока
В основе работы двигателя постоянного
Принцип работы двигателей постоянного тока
В основе работы двигателя постоянного

Уравнение электрического равновесия для якорной обмотки выглядит следующим образом:
U =
Уравнение электрического равновесия для якорной обмотки выглядит следующим образом:
U =
Двигатели постоянного тока (ДПТ) параллельного возбуждения
В этих двигателях обмотка возбуждения
Двигатели постоянного тока (ДПТ) параллельного возбуждения
В этих двигателях обмотка возбуждения
В начальный момент пуска ДПТ частота вращения якоря n = 0,
В начальный момент пуска ДПТ частота вращения якоря n = 0,
Электромеханические свойства ДПТ определяются его скоростной n(Iя) или механической n(M) характеристиками.
Электромеханические свойства ДПТ определяются его скоростной n(Iя) или механической n(M) характеристиками.
Механическая характеристика n(M) представляет зависимость частоты вращения якоря n от
Механическая характеристика n(M) представляет зависимость частоты вращения якоря n от
Естественная механическая характеристика n(M) ДПТ параллельного возбуждения является жесткой, т. к.
Естественная механическая характеристика n(M) ДПТ параллельного возбуждения является жесткой, т. к.
Пуск ДПТ
Прямой пуск двигателя (Rп = 0) применяют только для
Пуск ДПТ
Прямой пуск двигателя (Rп = 0) применяют только для
При пуске двигателей большой мощности использование пускового реостата (из-за его громоздкости
При пуске двигателей большой мощности использование пускового реостата (из-за его громоздкости
 Геологічна будова і нафтогазоносність внутрішньоконтинентальних морських басейнів
Геологічна будова і нафтогазоносність внутрішньоконтинентальних морських басейнів 20130103_konspekt_individualnogo_zanyatiya_po_rsv_i_fp_0
20130103_konspekt_individualnogo_zanyatiya_po_rsv_i_fp_0 У кого сегодня юбилей
У кого сегодня юбилей Техника для цементирования и оборудование
Техника для цементирования и оборудование Отзывы ПРОФИ.РУ
Отзывы ПРОФИ.РУ Урок 4
Урок 4 Смирнов А.А. Об участии в областной профильной юнармейской онлайн-смене
Смирнов А.А. Об участии в областной профильной юнармейской онлайн-смене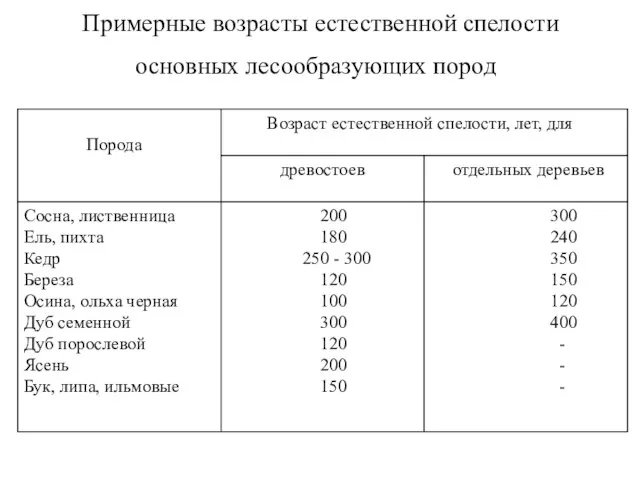 Примерные возрасты естественной спелости основных лесообразующих пород
Примерные возрасты естественной спелости основных лесообразующих пород 20150320_kartiny
20150320_kartiny 牛肉面真好吃. Китайский язык
牛肉面真好吃. Китайский язык Республиканский проект Тимуровцы
Республиканский проект Тимуровцы Презентпция Серёгина С.А
Презентпция Серёгина С.А Россия- страна возможностей
Россия- страна возможностей 20141102_razvenchannyy_geroy_nachalo
20141102_razvenchannyy_geroy_nachalo Построение детали по чертежу
Построение детали по чертежу Психологические особенности развития детей дошкольного возраста
Психологические особенности развития детей дошкольного возраста Модернизация натяжного устройства ленточного конвейера
Модернизация натяжного устройства ленточного конвейера Единицы массы
Единицы массы Псалом 14
Псалом 14 71366274
71366274 5_Юридичний_та_організаційний_план
5_Юридичний_та_організаційний_план Трагедия одного гения. Создатель русского фарфора Д. И. Виноградов
Трагедия одного гения. Создатель русского фарфора Д. И. Виноградов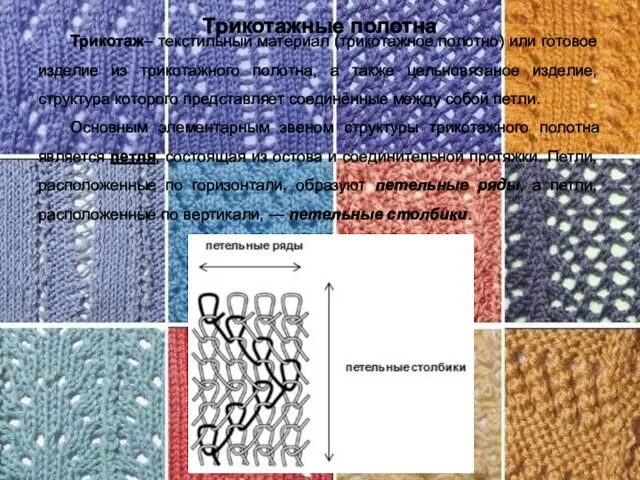 Трикотажные полотна
Трикотажные полотна ландшафты угледобычи
ландшафты угледобычи Благоустройство территории по адресу ул. Депутатская 61 в рамках проекта Наш Двор
Благоустройство территории по адресу ул. Депутатская 61 в рамках проекта Наш Двор 20130622_vinni_puh_differenciaciya_zvukov_zh_i_z
20130622_vinni_puh_differenciaciya_zvukov_zh_i_z Детская площадка в melis stoke park
Детская площадка в melis stoke park ЕРМ инструкция пользователя
ЕРМ инструкция пользователя