- Многофункциональный радиолокационный комплекс БЛА для освещения ледовой обстановки “Арктика”

Содержание
- 2. Автономное плавание морских судов к устьям Сибирских рек. Многофункциональный радиолокационный комплекс освещения ледовой обстановки морского и
- 3. Освоение и эксплуатация СМП и районов крайнего Севера Для успешного освоения и эксплуатации СМП и районов
- 4. МРК “Арктика” предназначен для автономной проводки судов из Северных морей в устья Сибирских рек. Обеспечивает измерение
- 5. Радиолокатор Х диапазона Радиолокатор L диапазона Варианты вычислителя – планшетный ноутбук, встроенный в панель процессор с
- 6. Виды размещения МРК “Арктика” на носителях Размещение блоков X и L д.в. МРК в носовой части
- 7. ТАКТИКО ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ МНОГОФУНКЦИОНАЛЬНОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА “АРКТИКА”
- 8. Состав измерительного модуля Х д.в.
- 9. В работе планировалось применение планшетного компьютера производства ОАО «МКБ «Компас» (может использоваться для работы с изделием
- 10. Структурная схема программного обеспечения
- 11. Драйвер прибора Программа управления и отображения данных пробор USB RS-485 БПВВ БПГА БПОХ БПКЛ БПВВ –
- 12. Результат измерения толщины льда
- 13. Просмотр сохраненных результатов измерений ледового слоя
- 14. Измерение тонкого льда
- 15. НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ Характеристики аэромобильной платформы для периодического/постоянного (в ходе движения объекта) контроля трассы
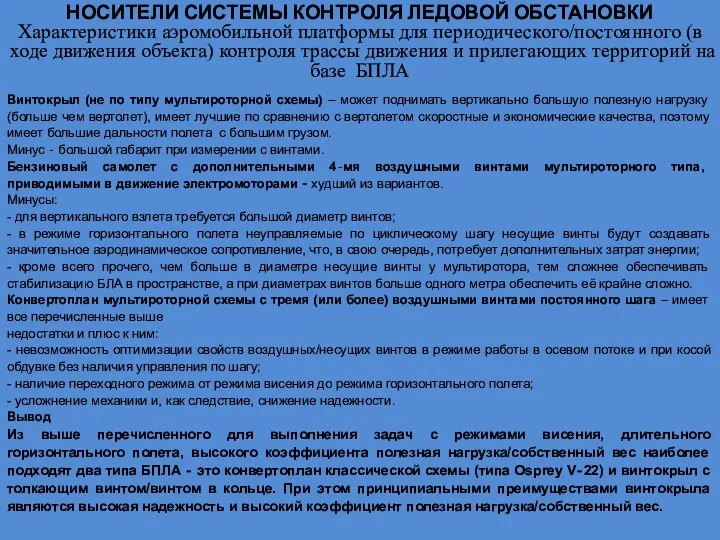
- 16. НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ Характеристики аэромобильной платформы для периодического/постоянного (в ходе движения объекта) контроля трассы
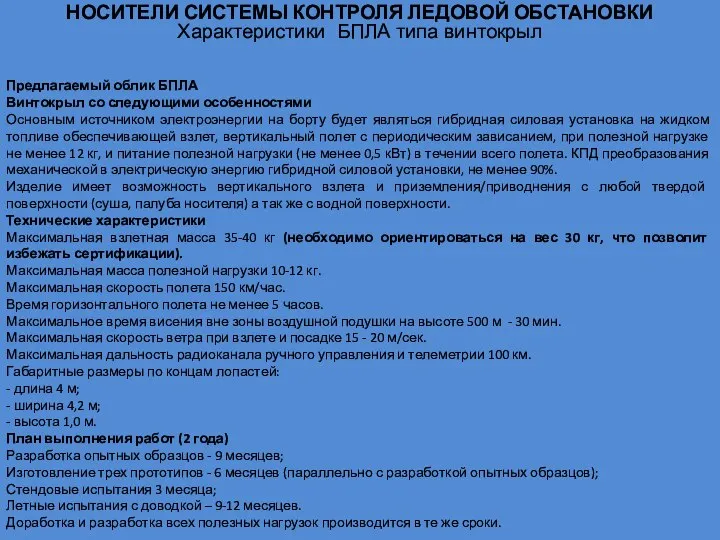
- 17. НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ Характеристики БПЛА типа винтокрыл Предлагаемый облик БПЛА Винтокрыл со следующими особенностями
- 18. НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ Концепт БПЛА на базе винтокрыла
- 19. ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА Целесообразный комплект оборудования для сбора информации на базе БПЛА при движении
- 20. ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА Чрезсредные лазерные сканеры Системы чрезсредного сканирования. Системы чрезсрендного сканирования используются для
- 21. ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА Чрезсредные лазерные сканеры Вертолетная система поиска подводных мин ALMDS (вес, только
- 23. Скачать презентацию
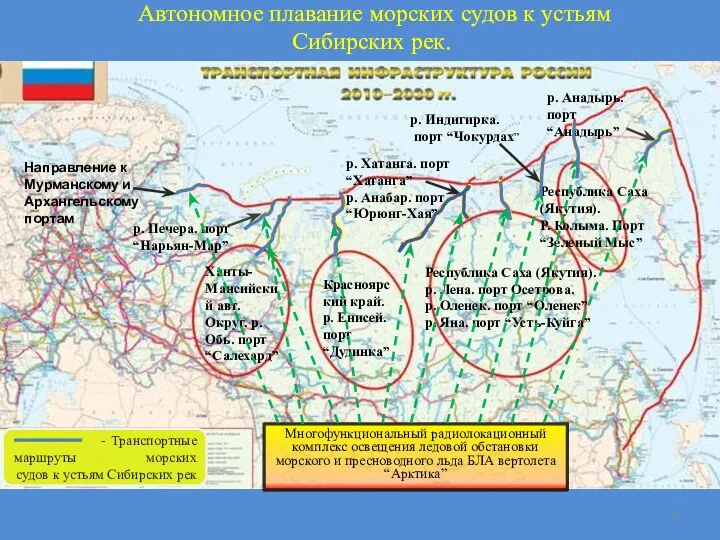
Автономное плавание морских судов к устьям Сибирских рек.
Многофункциональный радиолокационный комплекс освещения
Автономное плавание морских судов к устьям Сибирских рек.
Многофункциональный радиолокационный комплекс освещения

Освоение и эксплуатация СМП и районов крайнего Севера
Для успешного освоения
Освоение и эксплуатация СМП и районов крайнего Севера
Для успешного освоения
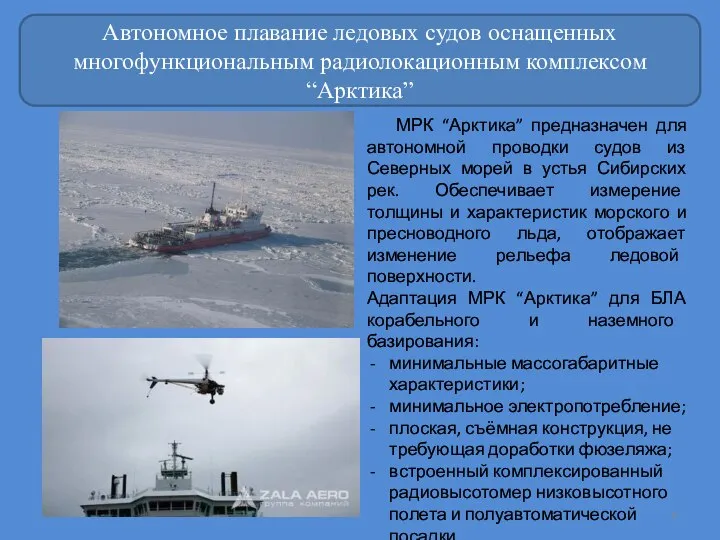
МРК “Арктика” предназначен для автономной проводки судов из Северных морей
МРК “Арктика” предназначен для автономной проводки судов из Северных морей

Радиолокатор Х диапазона
Радиолокатор L диапазона
Варианты вычислителя – планшетный ноутбук, встроенный в
Радиолокатор Х диапазона
Радиолокатор L диапазона
Варианты вычислителя – планшетный ноутбук, встроенный в

Виды размещения МРК “Арктика” на носителях
Размещение блоков X и L д.в.
Виды размещения МРК “Арктика” на носителях
Размещение блоков X и L д.в.
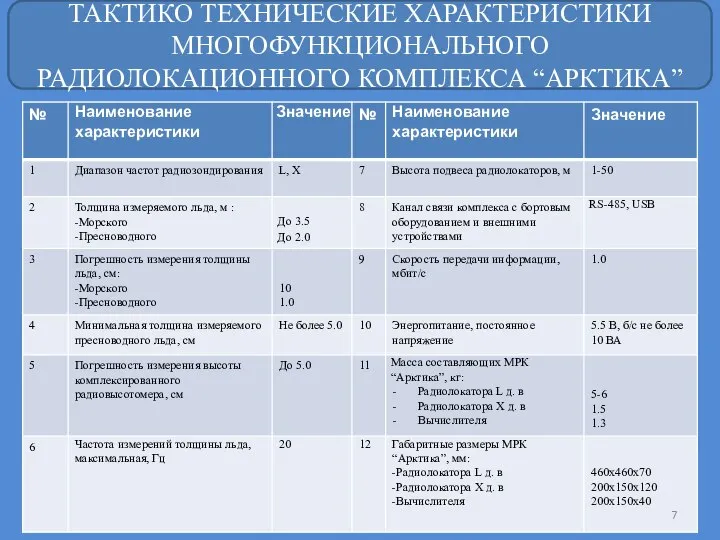
ТАКТИКО ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ МНОГОФУНКЦИОНАЛЬНОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА “АРКТИКА”
ТАКТИКО ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ МНОГОФУНКЦИОНАЛЬНОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА “АРКТИКА”
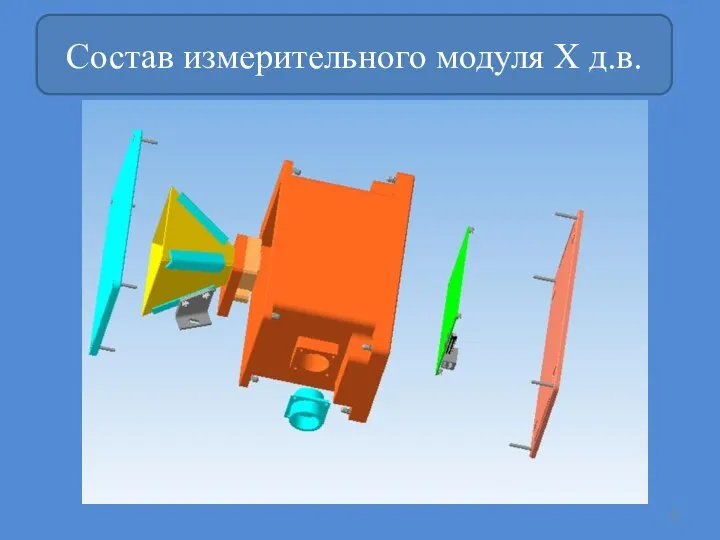
Состав измерительного модуля Х д.в.
Состав измерительного модуля Х д.в.

В работе планировалось применение планшетного компьютера производства ОАО «МКБ «Компас» (может
В работе планировалось применение планшетного компьютера производства ОАО «МКБ «Компас» (может
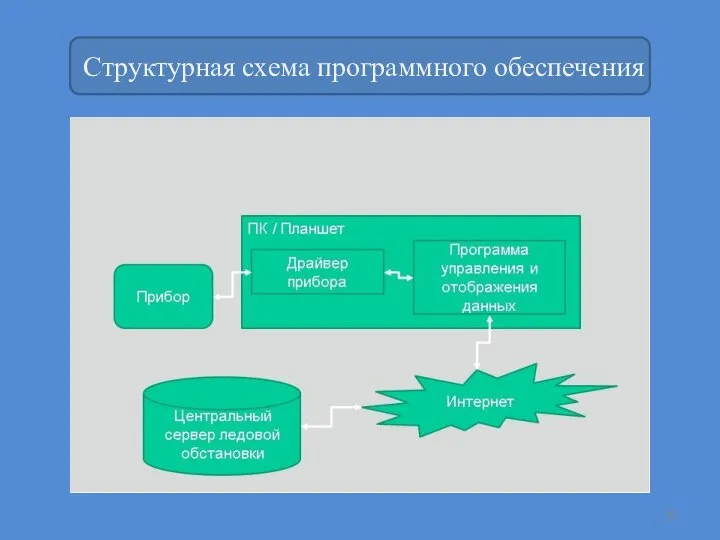
Структурная схема программного обеспечения
Структурная схема программного обеспечения
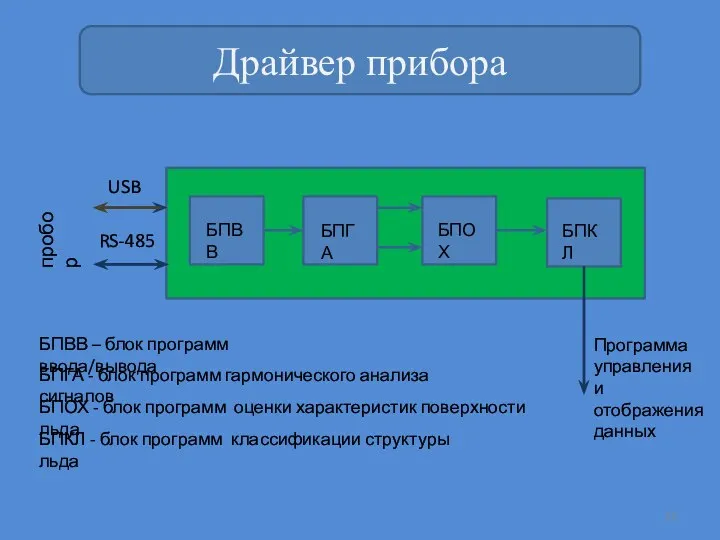
Драйвер прибора
Программа управления и отображения данных
пробор
USB
RS-485
БПВВ
БПГА
БПОХ
БПКЛ
БПВВ – блок программ ввода/вывода
БПГА -
Драйвер прибора
Программа управления и отображения данных
пробор
USB
RS-485
БПВВ
БПГА
БПОХ
БПКЛ
БПВВ – блок программ ввода/вывода
БПГА -
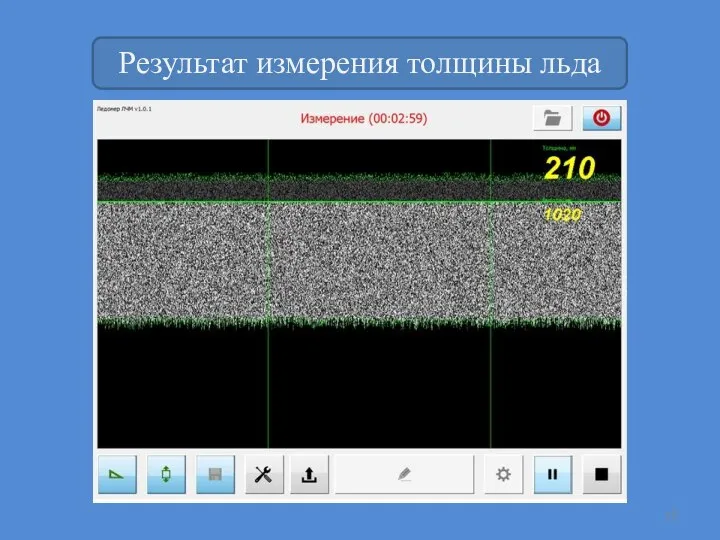
Результат измерения толщины льда
Результат измерения толщины льда
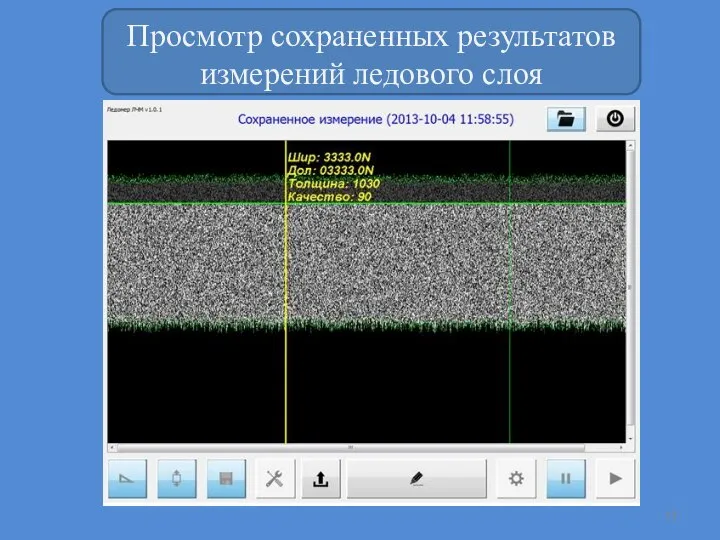
Просмотр сохраненных результатов измерений ледового слоя
Просмотр сохраненных результатов измерений ледового слоя
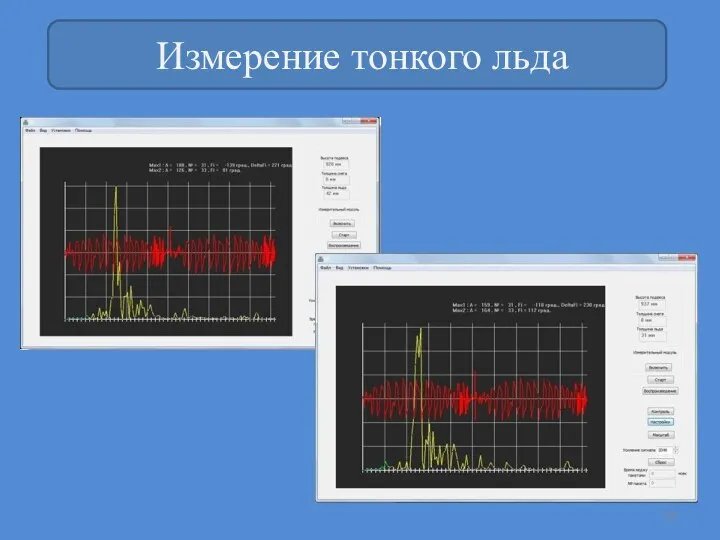
Измерение тонкого льда
Измерение тонкого льда
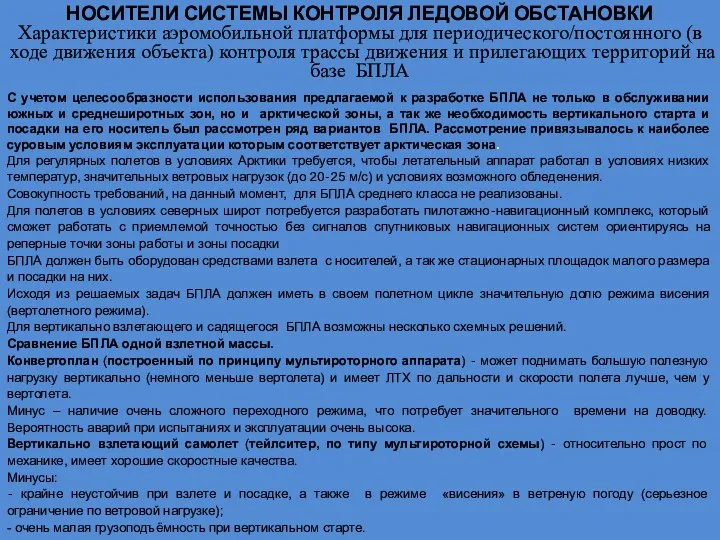
НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ
Характеристики аэромобильной платформы для периодического/постоянного (в ходе
НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ
Характеристики аэромобильной платформы для периодического/постоянного (в ходе
НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ
Характеристики аэромобильной платформы для периодического/постоянного (в
НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ
Характеристики аэромобильной платформы для периодического/постоянного (в
НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ
Характеристики БПЛА типа винтокрыл
Предлагаемый облик БПЛА
Винтокрыл
НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ
Характеристики БПЛА типа винтокрыл
Предлагаемый облик БПЛА
Винтокрыл

НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ
Концепт БПЛА на базе винтокрыла
НОСИТЕЛИ СИСТЕМЫ КОНТРОЛЯ ЛЕДОВОЙ ОБСТАНОВКИ
Концепт БПЛА на базе винтокрыла
ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА
Целесообразный комплект оборудования для сбора информации
ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА
Целесообразный комплект оборудования для сбора информации
ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА
Чрезсредные лазерные сканеры
Системы чрезсредного сканирования.
Системы чрезсрендного сканирования
ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА
Чрезсредные лазерные сканеры
Системы чрезсредного сканирования.
Системы чрезсрендного сканирования

ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА
Чрезсредные лазерные сканеры
Вертолетная система поиска подводных мин
ЭЛЕМЕНТЫ СИСТЕМЫ КОНТРОЛЯ ВОДНОГО ПРОСТРАНСТВА
Чрезсредные лазерные сканеры
Вертолетная система поиска подводных мин
 Дворянские усадьбы второй половины XIX века
Дворянские усадьбы второй половины XIX века Вчитель історії Одеської гімназії № 9
Вчитель історії Одеської гімназії № 9 20140921_3
20140921_3 Основные требования для строительства
Основные требования для строительства В. А. Осеева Что легче?
В. А. Осеева Что легче? Театральные игры для детей
Театральные игры для детей Слайды на тему осень
Слайды на тему осень Разборка и сборка запорных устройств системы водоснабжения
Разборка и сборка запорных устройств системы водоснабжения Вентиляция и кондиционирование
Вентиляция и кондиционирование ЦАРСТВО БАКТЕРИИ ОГЭ
ЦАРСТВО БАКТЕРИИ ОГЭ Алгебра на 30.03
Алгебра на 30.03 Пути совершенствования транспортно-логистической деятельности производственного предприятия
Пути совершенствования транспортно-логистической деятельности производственного предприятия Зоотехнические основы ведения отрасли птицеводства
Зоотехнические основы ведения отрасли птицеводства Развитие речи детей дошкольного возраста Матюнина МС
Развитие речи детей дошкольного возраста Матюнина МС Презентация Тукай
Презентация Тукай Снежный человек
Снежный человек Помощник машиниста
Помощник машиниста Управление и защита ЯЭУ: СУЗ АЭС
Управление и защита ЯЭУ: СУЗ АЭС Топливная система
Топливная система 20161017_rossiyskaya_imperiya_vo_vtoroy_pol_xix-nach_xx_v
20161017_rossiyskaya_imperiya_vo_vtoroy_pol_xix-nach_xx_v Game Intro and Players's Strategy
Game Intro and Players's Strategy Қой шаруашылығы
Қой шаруашылығы 20170613_rytsarskiy_turnir
20170613_rytsarskiy_turnir Mi viaje favorito
Mi viaje favorito Лестница. Элементы лестницы
Лестница. Элементы лестницы Проект размера рубок ухода в сосновых лесах ГЛХУ Щучинский лесхоз с использованием ГИС-технологий
Проект размера рубок ухода в сосновых лесах ГЛХУ Щучинский лесхоз с использованием ГИС-технологий новое
новое Моя Улюблена книга
Моя Улюблена книга