- Неструев Макар 1в_научная работа_роботы

Содержание
- 2. СОДЕРЖАНИЕ Определение и типы промышленных роботов. Применение промышленных роботов Привила безопасности при работе с промышленным роботом
- 3. ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ Промышленный робот совсем не похож на человека - это автоматическое устройство,
- 4. ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ Стандартный манипулятор выполнен из нескольких сегментов, которые соединяются с помощью суставов.
- 5. ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ Управляемы робот – управляется человеком (оператором) Полуавтономный робот – действуют строго
- 6. ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ Промышленные роботы выполняют сложную и тяжелую работу, заменяют людей в опасном производстве, способны
- 7. ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ Сварка Погрузка Раскрой материала плазменная резка лазерная резка гидроабразивная резка Литейное и кузнечно-прессовое
- 8. ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ Гибка труб Фрезерование и сверление Шлифование
- 9. ПРАВИЛА БЕЗОПАСНОСТИ Роботов устанавливают в специально отведенных местах, окрашивают в яркие цвета и монтируют ограждения в
- 10. КОЛЛАБОРАТИВНЫЙ РОБОТ (КОБОТ) Коллаборативный робот (кобот) — это автоматическое устройство, которое может работать совместно с человеком
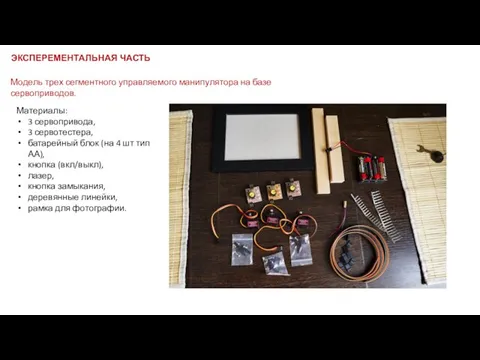
- 11. ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ Модель трех сегментного управляемого манипулятора на базе сервоприводов. Материалы: 3 сервопривода, 3 сервотестера, батарейный
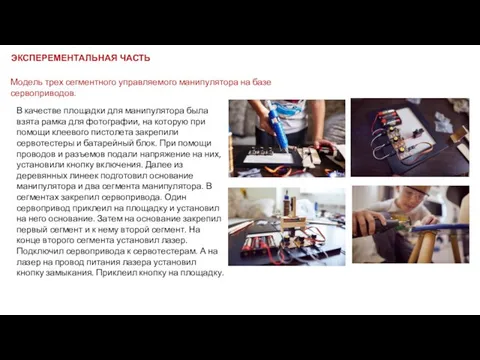
- 12. ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ Модель трех сегментного управляемого манипулятора на базе сервоприводов. В качестве площадки для манипулятора была
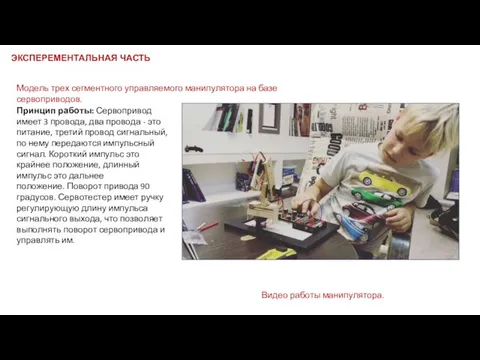
- 13. ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ Видео работы манипулятора. Принцип работы: Сервопривод имеет 3 провода, два провода - это питание,
- 14. ЗАКЛЮЧЕНИЕ Применение роботов в промышленном производстве имеет ряд преимуществ: Дольше и больше работает! Уменьшает производственные потери!
- 16. Скачать презентацию

СОДЕРЖАНИЕ
Определение и типы промышленных роботов.
Применение промышленных роботов
Привила безопасности при работе
СОДЕРЖАНИЕ
Определение и типы промышленных роботов.
Применение промышленных роботов
Привила безопасности при работе

ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ
Промышленный робот совсем не похож на человека
ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ
Промышленный робот совсем не похож на человека

ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ
Стандартный манипулятор выполнен из нескольких сегментов, которые
ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ
Стандартный манипулятор выполнен из нескольких сегментов, которые

ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ
Управляемы робот – управляется человеком (оператором)
Полуавтономный робот
ОПРЕДЕЛЕНИЕ И ТИПЫ ПРОМЫШЛЕННЫХ РОБОТОВ
Управляемы робот – управляется человеком (оператором)
Полуавтономный робот

ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ
Промышленные роботы выполняют сложную и тяжелую работу, заменяют людей
ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ
Промышленные роботы выполняют сложную и тяжелую работу, заменяют людей

ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ
Сварка
Погрузка
Раскрой материала
плазменная резка
лазерная резка
гидроабразивная резка
Литейное и кузнечно-прессовое производство
ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ
Сварка
Погрузка
Раскрой материала
плазменная резка
лазерная резка
гидроабразивная резка
Литейное и кузнечно-прессовое производство

ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ
Гибка труб
Фрезерование и сверление
Шлифование
ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ
Гибка труб
Фрезерование и сверление
Шлифование

ПРАВИЛА БЕЗОПАСНОСТИ
Роботов устанавливают в специально отведенных местах, окрашивают в яркие цвета
ПРАВИЛА БЕЗОПАСНОСТИ
Роботов устанавливают в специально отведенных местах, окрашивают в яркие цвета

КОЛЛАБОРАТИВНЫЙ РОБОТ (КОБОТ)
Коллаборативный робот (кобот) — это автоматическое устройство, которое может
КОЛЛАБОРАТИВНЫЙ РОБОТ (КОБОТ)
Коллаборативный робот (кобот) — это автоматическое устройство, которое может
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ
Модель трех сегментного управляемого манипулятора на базе сервоприводов.
Материалы:
3 сервопривода,
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ
Модель трех сегментного управляемого манипулятора на базе сервоприводов.
Материалы:
3 сервопривода,
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ
Модель трех сегментного управляемого манипулятора на базе сервоприводов.
В качестве площадки для манипулятора
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ
Модель трех сегментного управляемого манипулятора на базе сервоприводов.
В качестве площадки для манипулятора
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ
Видео работы манипулятора.
Принцип работы: Сервопривод имеет 3 провода, два провода -
ЭКСПЕРЕМЕНТАЛЬНАЯ ЧАСТЬ
Видео работы манипулятора.
Принцип работы: Сервопривод имеет 3 провода, два провода -
ЗАКЛЮЧЕНИЕ
Применение роботов в промышленном производстве имеет ряд преимуществ:
Дольше и больше работает!
Уменьшает
ЗАКЛЮЧЕНИЕ
Применение роботов в промышленном производстве имеет ряд преимуществ:
Дольше и больше работает!
Уменьшает
Похожие презентации
 Построение воротников
Построение воротников fd-663ec72e
fd-663ec72e
 Назначение, устройство и принцип работы основных элементов ГТУ. Лекция №2.2
Назначение, устройство и принцип работы основных элементов ГТУ. Лекция №2.2 Звуковая культура речи:дифференциация звуков [Р] – [Л]
Звуковая культура речи:дифференциация звуков [Р] – [Л] Вопросы права
Вопросы права Коммутаторы аналоговых сигналов. Устройство аналоговых ключей и коммутаторов сигналов
Коммутаторы аналоговых сигналов. Устройство аналоговых ключей и коммутаторов сигналов Теоретические основы инспекторской деятельности. Порядок действий при обнаружении правонарушения
Теоретические основы инспекторской деятельности. Порядок действий при обнаружении правонарушения Программа сообщества нового поколения
Программа сообщества нового поколения 20150408_po_motsartu
20150408_po_motsartu Подготовка модели исследований: система управления с ПИД-регулятором
Подготовка модели исследований: система управления с ПИД-регулятором Интерактивная игра - викторина. Здорового аппетита!
Интерактивная игра - викторина. Здорового аппетита! Молитва. Что такое молитва?
Молитва. Что такое молитва? Социальный проект на тему: Мы в ответе за тех, кого приручили
Социальный проект на тему: Мы в ответе за тех, кого приручили Работник контактной зоны – лицо, непосредственно контактирующее с клиентом
Работник контактной зоны – лицо, непосредственно контактирующее с клиентом Победа ковалась в тылу
Победа ковалась в тылу Интеллектуальная система контроля потребления энергоресурсов
Интеллектуальная система контроля потребления энергоресурсов Поздравление с юбилеем
Поздравление с юбилеем Интерьер Успенского собора
Интерьер Успенского собора 20161022_konkurs_eruditov
20161022_konkurs_eruditov Оценка эффективности эксплуатации коммерческого гибридного автотранспорта
Оценка эффективности эксплуатации коммерческого гибридного автотранспорта Подводные технические средства: основные составляющие
Подводные технические средства: основные составляющие История Сибирских городов
История Сибирских городов Путешествие в LEGO страну
Путешествие в LEGO страну Первое состязание в Лицее между параллельными группами
Первое состязание в Лицее между параллельными группами О комплексном благоустройстве площади Старосенной и утверждении комплексной схемы временных сооружений Старосенной площади
О комплексном благоустройстве площади Старосенной и утверждении комплексной схемы временных сооружений Старосенной площади Выполнение операций при получении транша в кредитном модуле iBank
Выполнение операций при получении транша в кредитном модуле iBank Лабораторная работа
Лабораторная работа