- Переходные процессы в электроприводах. Лекция №9

Содержание
- 2. Электропривод Расчет продолжительности переходных процессов электропривода. Исходя из основного уравнения движения электропривода с постоянным моментом инерции
- 3. Электропривод Расчет продолжительности переходных процессов электропривода. Из-за сложности представления аналитической зависимости избыточного момента от скорости вращения
- 4. Электропривод. Ч.1 Расчет продолжительности переходных процессов электропривода. Суть метода конечных приращений сводится к замене дифференциалов переменных
- 5. Электропривод Расчет продолжительности переходных процессов электропривода. Таким образом, полная продолжительность переходного процесса электропривода будет равна где
- 6. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. Общие потери мощности в
- 7. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. Под переменными потерями подразумеваются
- 8. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. В трехфазных асинхронных электродвигателях
- 9. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. Переменные потери мощности, выделяющиеся
- 10. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. Большое значение определение потерь
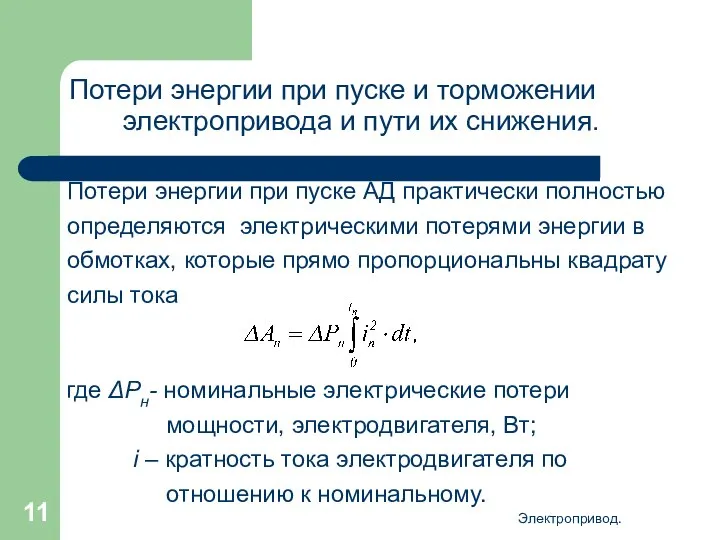
- 11. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. Потери энергии при пуске
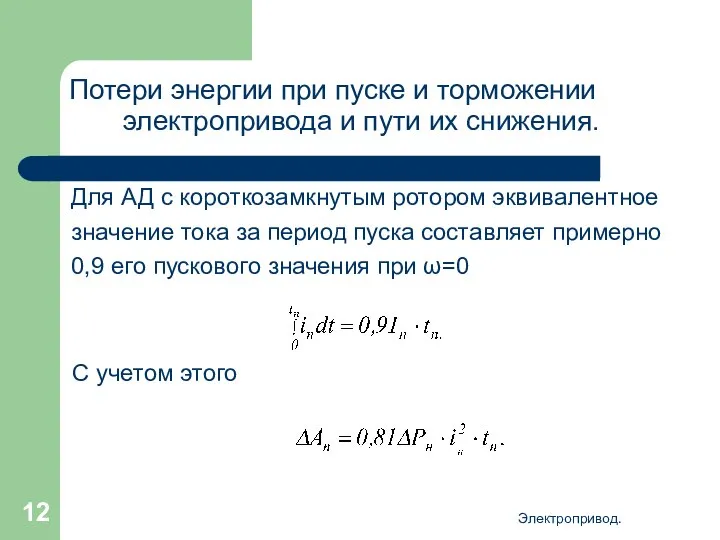
- 12. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. Для АД с короткозамкнутым
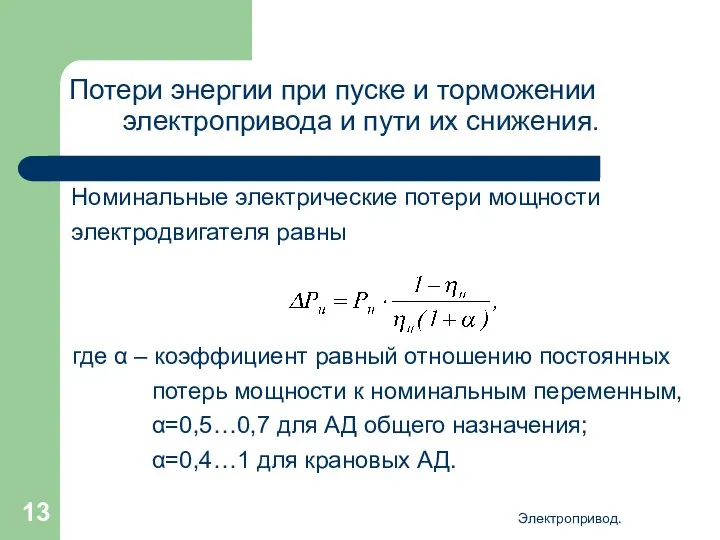
- 13. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. Номинальные электрические потери мощности
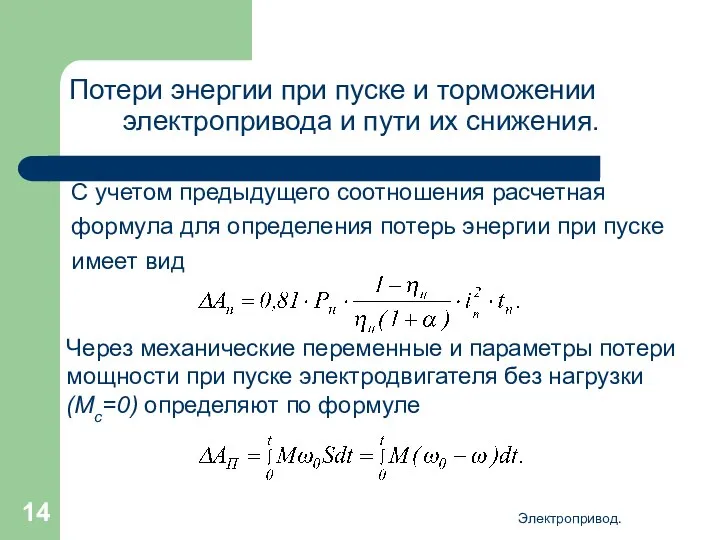
- 14. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. С учетом предыдущего соотношения
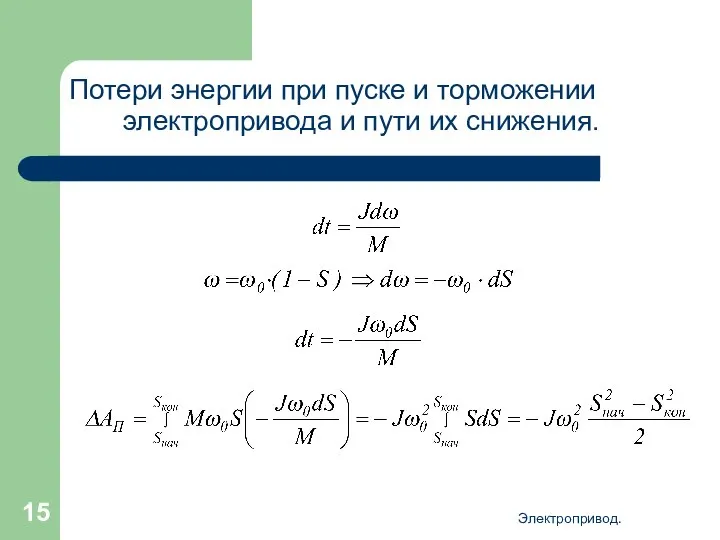
- 15. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения.
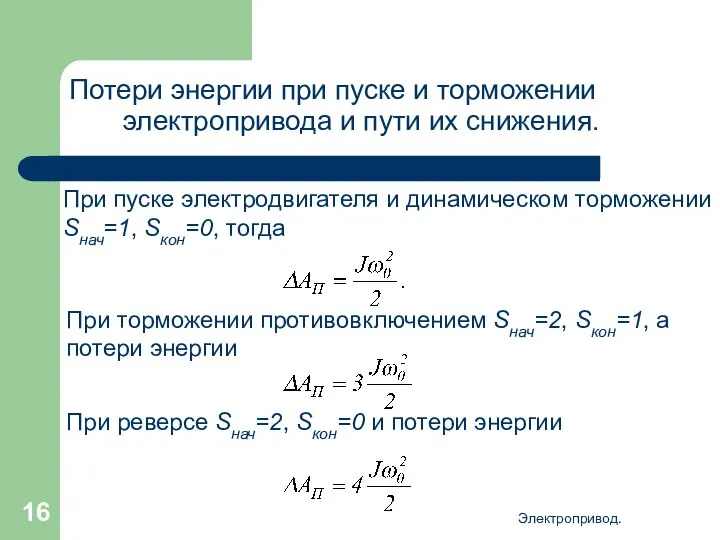
- 16. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. При пуске электродвигателя и
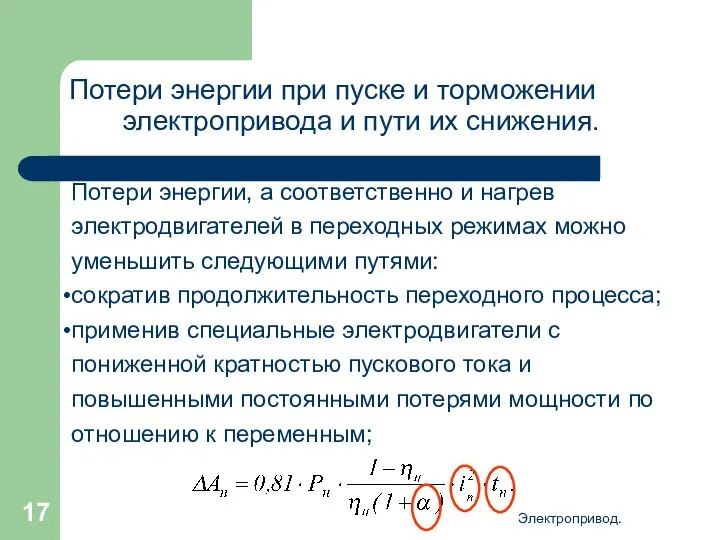
- 17. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. Потери энергии, а соответственно
- 18. Электропривод. Потери энергии при пуске и торможении электропривода и пути их снижения. применив ступенчатое поочередное переключение
- 19. Электропривод. Статическая устойчивость электропривода. При рассмотрении динамики различных электроприводов возникает задача оценки их устойчивой работы при
- 20. Электропривод. Статическая устойчивость электропривода. Статическую устойчивость ЭП рассматривают в том случае, если длительность избыточного момента нагрузки
- 21. Электропривод. Статическая устойчивость электропривода. При возникновении в системе электропривода внешнего воздействия уравнение движения можно записать в
- 22. Электропривод. Статическая устойчивость электропривода. Разделяя переменные, запишем дифференциальное уравнение решая которое будем иметь где с –
- 23. Электропривод. Статическая устойчивость электропривода. Из начальных условий при t=0 Δω=Δωнач. Тогда на основании последнего соотношения с=
- 24. Электропривод. Статическая устойчивость электропривода. Из предыдущего уравнения следует, что для обеспечения статической устойчивости необходимо, чтобы при
- 25. Электропривод. Динамическая устойчивость электропривода. При работе ЭП момент статического сопротивления перегрузки Мсп, действующий со стороны нагрузки,
- 26. Электропривод Динамическая устойчивость электропривода. При динамической устойчивости работоспособность ЭП сохраняется за счет дополнительного действия кинетической энергии
- 27. Электропривод. Динамическая устойчивость электропривода. Рабочий участок механической характеристики аппроксимируется прямой. В этом случае при ударной нагрузке
- 28. Электропривод. Динамическая устойчивость электропривода. Для электропривода с асинхронным электродвигателем где Sн - скольжение АД при номинальном
- 29. Электропривод. Динамическая устойчивость электропривода. Момент электродвигателя достигает максимального значения по истечении некоторого допустимого времени перегрузки.
- 31. Скачать презентацию
Электропривод
Расчет продолжительности переходных процессов электропривода.
Исходя из основного уравнения движения электропривода с
Электропривод
Расчет продолжительности переходных процессов электропривода.
Исходя из основного уравнения движения электропривода с
Электропривод
Расчет продолжительности переходных процессов электропривода.
Из-за сложности представления аналитической зависимости избыточного момента
Электропривод
Расчет продолжительности переходных процессов электропривода.
Из-за сложности представления аналитической зависимости избыточного момента
Электропривод. Ч.1
Расчет продолжительности переходных процессов электропривода.
Суть метода конечных приращений сводится к
Электропривод. Ч.1
Расчет продолжительности переходных процессов электропривода.
Суть метода конечных приращений сводится к
Электропривод
Расчет продолжительности переходных процессов электропривода.
Таким образом, полная продолжительность переходного процесса электропривода
Электропривод
Расчет продолжительности переходных процессов электропривода.
Таким образом, полная продолжительность переходного процесса электропривода
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Под
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Под
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
В
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
В
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Потери энергии при пуске и торможении электропривода и пути их
Электропривод.
Статическая устойчивость электропривода.
При рассмотрении динамики различных электроприводов возникает задача
Электропривод.
Статическая устойчивость электропривода.
При рассмотрении динамики различных электроприводов возникает задача
Электропривод.
Статическая устойчивость электропривода.
Статическую устойчивость ЭП рассматривают в том случае, если
Электропривод.
Статическая устойчивость электропривода.
Статическую устойчивость ЭП рассматривают в том случае, если
Электропривод.
Статическая устойчивость электропривода.
При возникновении в системе электропривода внешнего воздействия
Электропривод.
Статическая устойчивость электропривода.
При возникновении в системе электропривода внешнего воздействия
Электропривод.
Статическая устойчивость электропривода.
Разделяя переменные, запишем дифференциальное уравнение
решая которое будем
Электропривод.
Статическая устойчивость электропривода.
Разделяя переменные, запишем дифференциальное уравнение
решая которое будем
Электропривод.
Статическая устойчивость электропривода.
Из начальных условий при t=0 Δω=Δωнач. Тогда на
Электропривод.
Статическая устойчивость электропривода.
Из начальных условий при t=0 Δω=Δωнач. Тогда на
Электропривод.
Статическая устойчивость электропривода.
Из предыдущего уравнения следует, что для обеспечения
Электропривод.
Статическая устойчивость электропривода.
Из предыдущего уравнения следует, что для обеспечения
Электропривод.
Динамическая устойчивость электропривода.
При работе ЭП момент статического сопротивления перегрузки Мсп,
Электропривод.
Динамическая устойчивость электропривода.
При работе ЭП момент статического сопротивления перегрузки Мсп,
Электропривод
Динамическая устойчивость электропривода.
При динамической устойчивости работоспособность ЭП сохраняется за счет
Электропривод
Динамическая устойчивость электропривода.
При динамической устойчивости работоспособность ЭП сохраняется за счет
Электропривод.
Динамическая устойчивость электропривода.
Рабочий участок механической характеристики аппроксимируется прямой. В
Электропривод.
Динамическая устойчивость электропривода.
Рабочий участок механической характеристики аппроксимируется прямой. В
Электропривод.
Динамическая устойчивость электропривода.
Для электропривода с асинхронным электродвигателем
где Sн
Электропривод.
Динамическая устойчивость электропривода.
Для электропривода с асинхронным электродвигателем
где Sн
Электропривод.
Динамическая устойчивость электропривода.
Момент электродвигателя достигает максимального значения по истечении
Электропривод.
Динамическая устойчивость электропривода.
Момент электродвигателя достигает максимального значения по истечении
 Жизнь без нефти
Жизнь без нефти Цитаты Эрика Леннарда Берна
Цитаты Эрика Леннарда Берна 20160123_pirey
20160123_pirey Petroschool presentation
Petroschool presentation 4D (2)
4D (2) 20150709_lirika
20150709_lirika Способы эксплуатации скважин
Способы эксплуатации скважин Любимая еда
Любимая еда Агрегатор скидок LIL.Price
Агрегатор скидок LIL.Price Software Testing Life Cycle (фундаментальний процес тестування) + тестова документація ч. 1
Software Testing Life Cycle (фундаментальний процес тестування) + тестова документація ч. 1 20160319_prilozhenie_3
20160319_prilozhenie_3 Система водоснабжения пассажирских вагонов
Система водоснабжения пассажирских вагонов Картскан Коммерческая презентация
Картскан Коммерческая презентация Inżynieria materiałowa i konstrukcja urządzeń
Inżynieria materiałowa i konstrukcja urządzeń Лужение и пайка проводов
Лужение и пайка проводов Инструкция+инвестора+
Инструкция+инвестора+ Контроллеры для систем автоматизации
Контроллеры для систем автоматизации Planificarea activitatilor de transport. Curs 3
Planificarea activitatilor de transport. Curs 3 School timetable
School timetable супер-презентация!
супер-презентация! Сольфеджио 7/7 тема урока : Ритмический аккомпанемент
Сольфеджио 7/7 тема урока : Ритмический аккомпанемент Самопрезентация студента Остапюк Дмитрия
Самопрезентация студента Остапюк Дмитрия новый проект
новый проект Самый большой рукотворный парк в пустыне. Слайды
Самый большой рукотворный парк в пустыне. Слайды Противодействие терроризму и экстремизму
Противодействие терроризму и экстремизму 20160217_podgotovka_k_ege_po_istorii-
20160217_podgotovka_k_ege_po_istorii- Робот, объезжающий препятствия, а также, робот, создающий еду
Робот, объезжающий препятствия, а также, робот, создающий еду Производство, передача и потребление электроэнергии
Производство, передача и потребление электроэнергии