- Подводный дрон

Содержание
- 2. Назначение и актуальность устройства Назначение: Инспекция подводных объектов Поисковые и спасательные операции Подводная съемка Актуальность: Дороговизна
- 3. Аналоги Gladius Mini - 140т.р. Chasing M2 - 300т.р.
- 4. Функциональная схема 1
- 5. Функциональная схема 2
- 6. Структурная схема
- 7. Список необходимых компонентов Бесколлекторные двигатели 4шт. Контроллер двигателя 4шт. Модуль реле x4 - 2 шт. Биполярный
- 8. Автоматизация Задача: автоматическое удержание дроном начальной глубины Параметры для моделирования → ↑ Модель двигателей ↑
- 9. Физическая часть моделирования (вертикальная ось):
- 11. Полная схема моделирования в режиме удержания начальной глубины
- 12. График зависимости глубины от времени
- 13. Информационная безопасность Оценка уязвимости разрабатываемой системы
- 14. Анатомия атаки Электромагнитная наводка - воздействие магнитных или электрических полей, токов или напряжений, которое нарушает нормальную
- 15. Альфа возможностей Доступность всех элементов и материалов Наличие устройства для разработки конструкции дрона и программирования Выход
- 16. Альфа заинтересованных сторон Компании, занимающиеся очисткой водоемов Компании, занимающиеся подводной съемкой животных или растений в естественных
- 17. Альфа требований Автономность работы: 3 часа Максимальная скорость вперед: 0,7 м/c Возможность поддержания глубины Стоимость: 30000
- 18. Альфа программной системы Основные технологии: Arduino IDE Solidworks Риски: Блокировка иностранного ПО на территории РФ Уход
- 19. Альфа работы
- 20. Альфа команды Менеджер (Знания микроэкономики, навыки контроля над циклом производства, понимание технических основ, высшее образование в
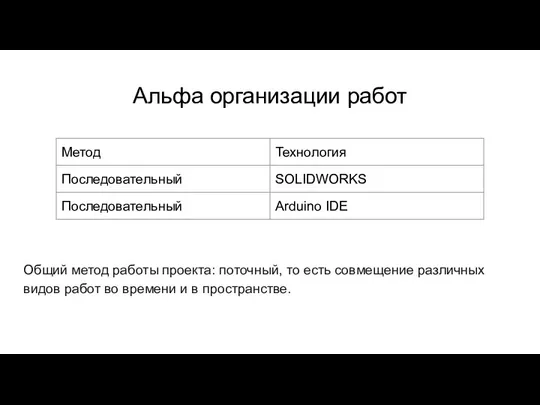
- 21. Альфа организации работ Общий метод работы проекта: поточный, то есть совмещение различных видов работ во времени
- 22. Диаграмма активностей
- 23. Диаграмма потока данных (по Юрдану и Коаду)
- 24. Диаграмма размещений
- 26. Скачать презентацию
Назначение и актуальность устройства
Назначение:
Инспекция подводных объектов
Поисковые и спасательные операции
Подводная съемка
Актуальность:
Назначение и актуальность устройства
Назначение:
Инспекция подводных объектов
Поисковые и спасательные операции
Подводная съемка
Актуальность:

Аналоги
Gladius Mini - 140т.р. Chasing M2 - 300т.р.
Аналоги
Gladius Mini - 140т.р. Chasing M2 - 300т.р.

Функциональная схема 1
Функциональная схема 1

Функциональная схема 2
Функциональная схема 2

Структурная схема
Структурная схема
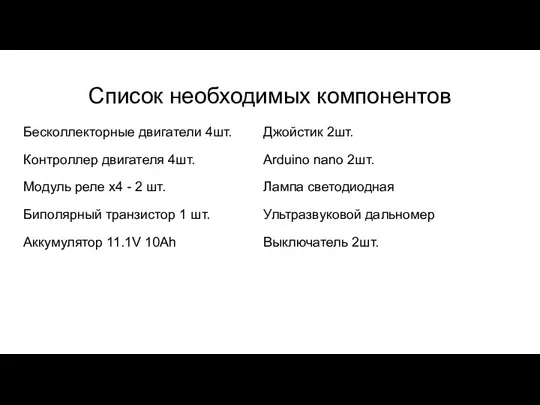
Список необходимых компонентов
Бесколлекторные двигатели 4шт.
Контроллер двигателя 4шт.
Модуль реле x4 - 2
Список необходимых компонентов
Бесколлекторные двигатели 4шт.
Контроллер двигателя 4шт.
Модуль реле x4 - 2
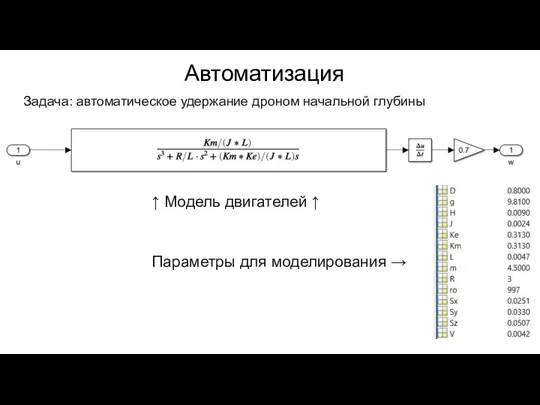
Автоматизация
Задача: автоматическое удержание дроном начальной глубины
Параметры для моделирования →
↑ Модель двигателей
Автоматизация
Задача: автоматическое удержание дроном начальной глубины
Параметры для моделирования →
↑ Модель двигателей

Физическая часть моделирования (вертикальная ось):
Физическая часть моделирования (вертикальная ось):


Полная схема моделирования в режиме удержания начальной глубины
Полная схема моделирования в режиме удержания начальной глубины
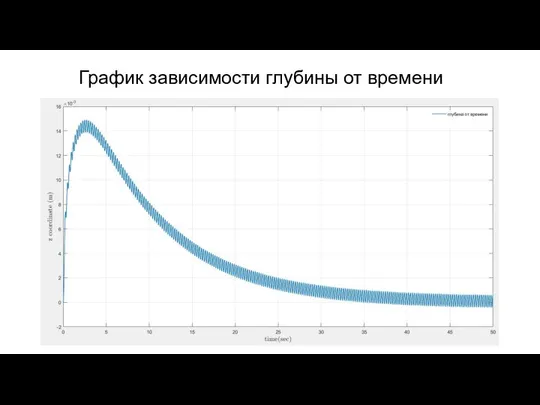
График зависимости глубины от времени
График зависимости глубины от времени
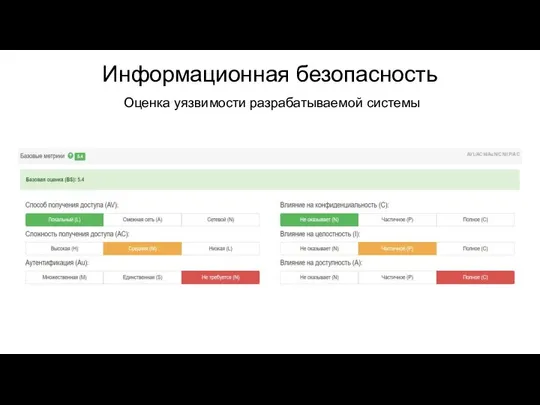
Информационная безопасность
Оценка уязвимости разрабатываемой системы
Информационная безопасность
Оценка уязвимости разрабатываемой системы
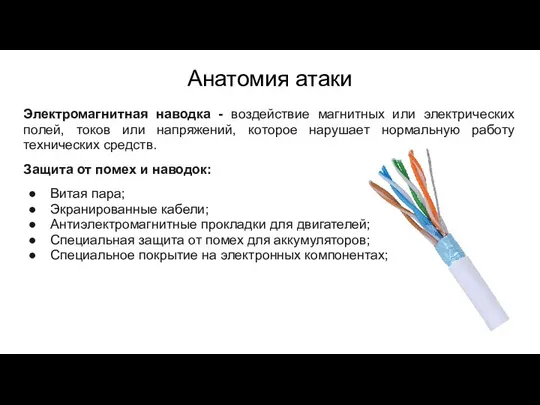
Анатомия атаки
Электромагнитная наводка - воздействие магнитных или электрических полей, токов или
Анатомия атаки
Электромагнитная наводка - воздействие магнитных или электрических полей, токов или
Альфа возможностей
Доступность всех элементов и материалов
Наличие устройства для разработки конструкции дрона
Альфа возможностей
Доступность всех элементов и материалов
Наличие устройства для разработки конструкции дрона
Альфа заинтересованных сторон
Компании, занимающиеся очисткой водоемов
Компании, занимающиеся подводной съемкой животных
Альфа заинтересованных сторон
Компании, занимающиеся очисткой водоемов
Компании, занимающиеся подводной съемкой животных
Альфа требований
Автономность работы: 3 часа
Максимальная скорость вперед: 0,7 м/c
Возможность поддержания глубины
Стоимость:
Альфа требований
Автономность работы: 3 часа
Максимальная скорость вперед: 0,7 м/c
Возможность поддержания глубины
Стоимость:
Альфа программной системы
Основные технологии:
Arduino IDE
Solidworks
Риски:
Блокировка иностранного ПО на территории
Альфа программной системы
Основные технологии:
Arduino IDE
Solidworks
Риски:
Блокировка иностранного ПО на территории
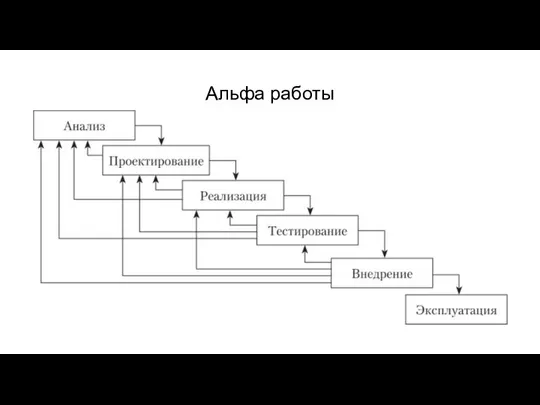
Альфа работы
Альфа работы
Альфа команды
Менеджер (Знания микроэкономики, навыки контроля над циклом производства, понимание технических
Альфа команды
Менеджер (Знания микроэкономики, навыки контроля над циклом производства, понимание технических
Альфа организации работ
Общий метод работы проекта: поточный, то есть совмещение различных
Альфа организации работ
Общий метод работы проекта: поточный, то есть совмещение различных
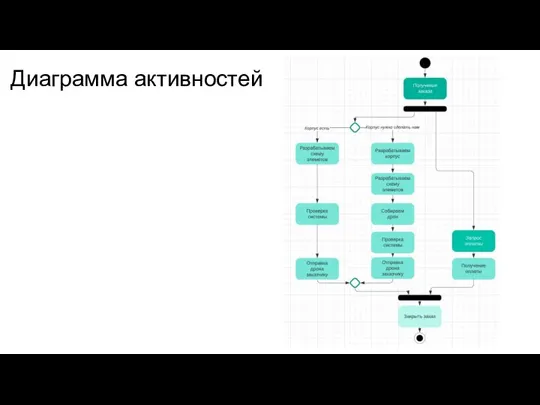
Диаграмма активностей
Диаграмма активностей
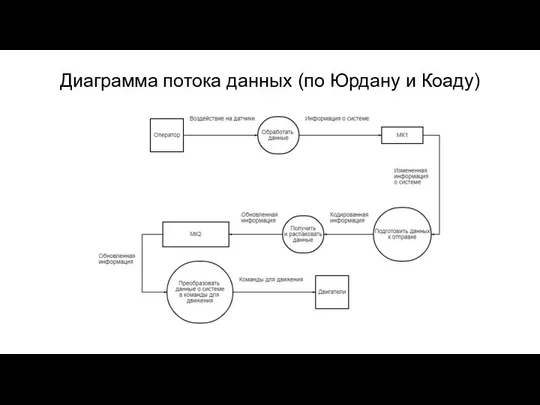
Диаграмма потока данных (по Юрдану и Коаду)
Диаграмма потока данных (по Юрдану и Коаду)

Диаграмма размещений
Диаграмма размещений
 20180904_urok_28_poslednie_desyatiletiya_rossiyskoy_imperii
20180904_urok_28_poslednie_desyatiletiya_rossiyskoy_imperii 1 урок 1 уровень (1)
1 урок 1 уровень (1) Публичное выступление
Публичное выступление Расчет и проектирование выпарного аппарата для концентрирования раствора аммиачной силитры
Расчет и проектирование выпарного аппарата для концентрирования раствора аммиачной силитры Моніторинг ЛКП квітень
Моніторинг ЛКП квітень Требования к объемному телевидению
Требования к объемному телевидению Правила машинного доения (тест)
Правила машинного доения (тест) Уникальный экспонат
Уникальный экспонат Успехи в освоении технологии за 6 класс
Успехи в освоении технологии за 6 класс 20131114_matveev_aleksandr_terentevich
20131114_matveev_aleksandr_terentevich Фундаменты мелкого заложения. Схема фундамента
Фундаменты мелкого заложения. Схема фундамента 4 Кач. вагонов
4 Кач. вагонов 20160220_1
20160220_1 Презентация Microsoft PowerPoint
Презентация Microsoft PowerPoint Английский язык – международный язык делового общения
Английский язык – международный язык делового общения География
География правила безопастности
правила безопастности труд людей весной гр.9
труд людей весной гр.9 У тебя есть борода , я скажу тебе да
У тебя есть борода , я скажу тебе да Вера православных христиан
Вера православных христиан Построение окружения для микросервисных приложений на примере CCFA
Построение окружения для микросервисных приложений на примере CCFA Типовые схемы автоматических сборочных агрегатов для автоматической и полуавтоматической сборки цилиндрических соединений
Типовые схемы автоматических сборочных агрегатов для автоматической и полуавтоматической сборки цилиндрических соединений islam_pavlov_felakov_stasyamba_-_kopiya
islam_pavlov_felakov_stasyamba_-_kopiya Роль экономики в развитии социальных отношений. Качество жизни
Роль экономики в развитии социальных отношений. Качество жизни Теплопроводность бетона
Теплопроводность бетона Новые пространственные концепции. Тема 2
Новые пространственные концепции. Тема 2 Пётр Ильич Чайковский (1840 – 1893)
Пётр Ильич Чайковский (1840 – 1893) PREZENTATsIYa_NA_ZAVTRA_33__33__33__33__33__33
PREZENTATsIYa_NA_ZAVTRA_33__33__33__33__33__33