- Принцип действия и устройство навигационных эхолотов и гидролокаторов

Содержание
- 2. Учебная и воспитательная цель: «Формирование у студентов целостного представления о современных автоматизированных системах управления движением судов»
- 3. Среди средств наблюдения, связи и управления в подводной среде особое место занимают гидроакустические станции (ГАС) активного
- 4. Принцип измерения дистанции до подводного объекта Принцип измерения дистанции до подводного объекта с помощью эхолота или
- 5. Электромеханические указатели глубин Электромеханические указатели глубин предназначаются для визуального отсчета глубин и управления посылками акустических импульсов.
- 6. Электромеханические указатели глубин Зондирующий импульс в основном максимуме диаграммы направленности распространяется ко дну, а в боковом
- 7. Электромеханические указатели глубин Применение неоновой лампочки вызвано тем, что она практически безынерционна, т. е. мгновенно зажигается
- 8. Самописцы указателей глубин В настоящее время наибольшее распространение получают самописцы с линейной механической разверткой в виде
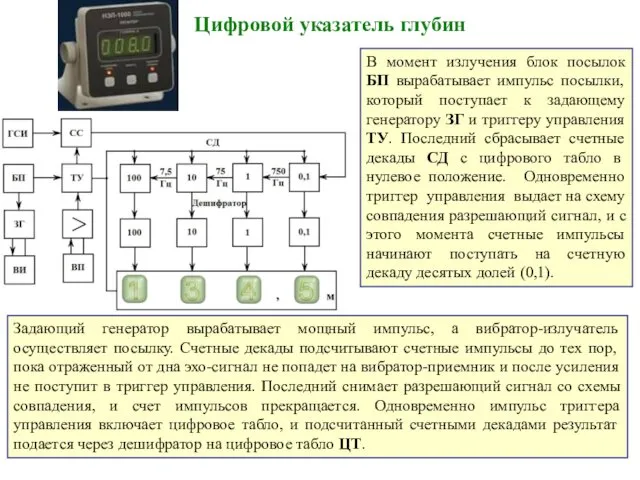
- 9. Цифровой указатель глубин Цифровой указатель глубин (ЦУГ) применяют при электронном методе измерения промежутка времени между посылкой
- 10. Цифровой указатель глубин В момент излучения блок посылок БП вырабатывает импульс посылки, который поступает к задающему
- 11. Измерение направления Наиболее простой и распространенной гидроакустической станцией для горизонтального обзора водного пространства является гидролокатор с
- 12. Измерение направления Обычно посылка зондирующих импульсов и прием эхо-сигналов происходят только при повороте антенны в одну
- 13. Измерение направления Одновременное наблюдение за подводной обстановкой в пределах любого сектора, вплоть до кругового (360), позволяют
- 14. Измерение направления При вертикальном сканировании в излучателях фазированная решетка ориентирована для сканирования 12-градусным лучом от поверхности
- 15. Измерение направления Горизонтальное сканирование предоставляет обзор подводной области перед судном и по левому и правому борту.
- 16. По принципу использования фазированной антенной решетки существуют два метода обзора подводного пространства – последовательный и параллельный.
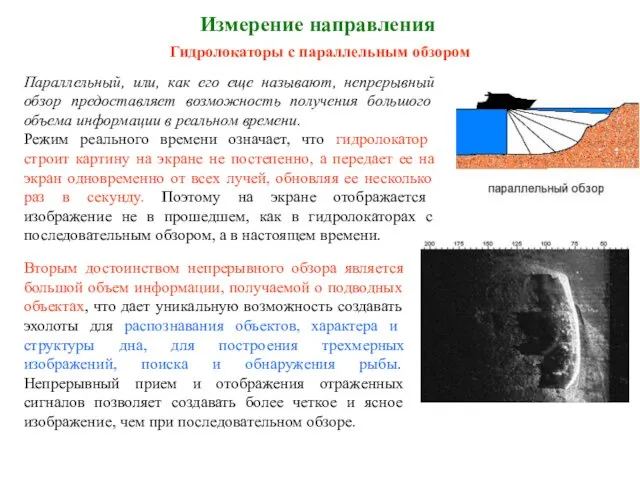
- 17. Измерение направления Параллельный, или, как его еще называют, непрерывный обзор предоставляет возможность получения большого объема информации
- 18. Для обработки такого большого объема информации в гидролокаторах с параллельным обзором используется мощный микропроцессор, способный выполнять
- 20. Скачать презентацию
Учебная и воспитательная цель:
«Формирование у студентов целостного представления о современных
Учебная и воспитательная цель: «Формирование у студентов целостного представления о современных

Среди средств наблюдения, связи и управления в подводной среде особое место
Среди средств наблюдения, связи и управления в подводной среде особое место
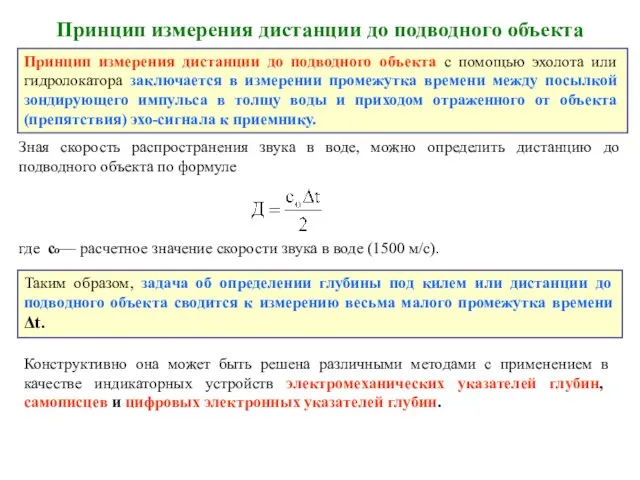
Принцип измерения дистанции до подводного объекта
Принцип измерения дистанции до подводного объекта
Принцип измерения дистанции до подводного объекта
Принцип измерения дистанции до подводного объекта
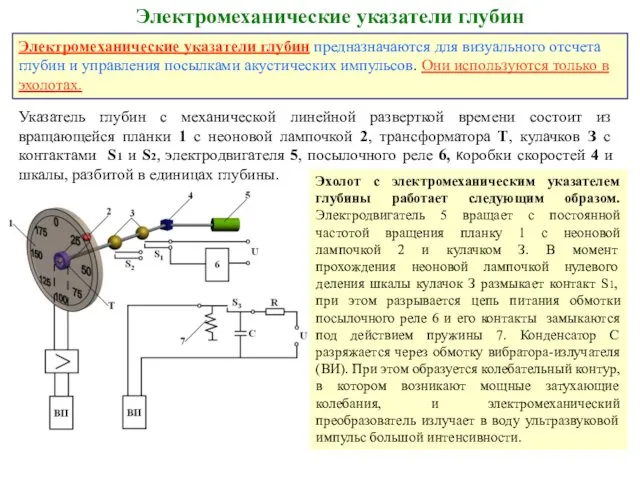
Электромеханические указатели глубин
Электромеханические указатели глубин предназначаются для визуального отсчета глубин
Электромеханические указатели глубин
Электромеханические указатели глубин предназначаются для визуального отсчета глубин

Электромеханические указатели глубин
Зондирующий импульс в основном максимуме диаграммы направленности распространяется
Электромеханические указатели глубин
Зондирующий импульс в основном максимуме диаграммы направленности распространяется

Электромеханические указатели глубин
Применение неоновой лампочки вызвано тем, что она практически
Электромеханические указатели глубин
Применение неоновой лампочки вызвано тем, что она практически

Самописцы указателей глубин
В настоящее время наибольшее распространение получают самописцы с линейной
Самописцы указателей глубин
В настоящее время наибольшее распространение получают самописцы с линейной
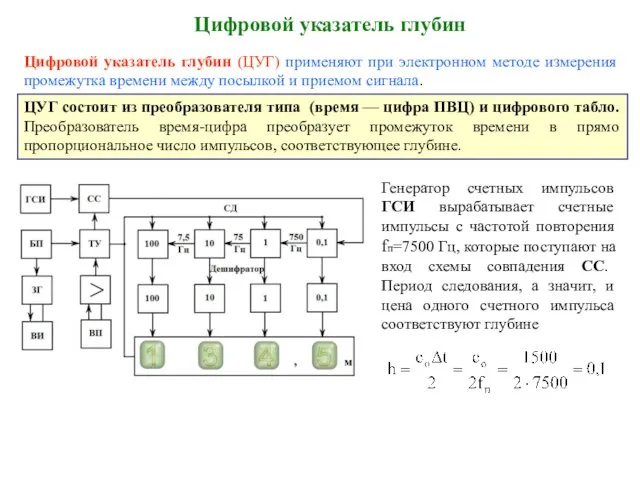
Цифровой указатель глубин
Цифровой указатель глубин (ЦУГ) применяют при электронном методе
Цифровой указатель глубин
Цифровой указатель глубин (ЦУГ) применяют при электронном методе
Цифровой указатель глубин
В момент излучения блок посылок БП вырабатывает импульс
Цифровой указатель глубин
В момент излучения блок посылок БП вырабатывает импульс

Измерение направления
Наиболее простой и распространенной гидроакустической станцией для горизонтального обзора
Измерение направления
Наиболее простой и распространенной гидроакустической станцией для горизонтального обзора

Измерение направления
Обычно посылка зондирующих импульсов и прием эхо-сигналов происходят только
Измерение направления
Обычно посылка зондирующих импульсов и прием эхо-сигналов происходят только

Измерение направления
Одновременное наблюдение за подводной обстановкой в пределах любого сектора,
Измерение направления
Одновременное наблюдение за подводной обстановкой в пределах любого сектора,

Измерение направления
При вертикальном сканировании в излучателях фазированная решетка ориентирована для сканирования
Измерение направления
При вертикальном сканировании в излучателях фазированная решетка ориентирована для сканирования

Измерение направления
Горизонтальное сканирование предоставляет обзор подводной области перед судном и по
Измерение направления
Горизонтальное сканирование предоставляет обзор подводной области перед судном и по

По принципу использования фазированной антенной решетки существуют два метода обзора подводного
По принципу использования фазированной антенной решетки существуют два метода обзора подводного
Измерение направления
Параллельный, или, как его еще называют, непрерывный обзор предоставляет возможность
Измерение направления
Параллельный, или, как его еще называют, непрерывный обзор предоставляет возможность

Для обработки такого большого объема информации в гидролокаторах с параллельным обзором
Для обработки такого большого объема информации в гидролокаторах с параллельным обзором
 Железнодорожные линии сложной конфигурации в горах
Железнодорожные линии сложной конфигурации в горах С Новым Годом 2015
С Новым Годом 2015 Accent/solaris(hcr)/проступание клея на потолке
Accent/solaris(hcr)/проступание клея на потолке Машинные швы. (7 класс)
Машинные швы. (7 класс)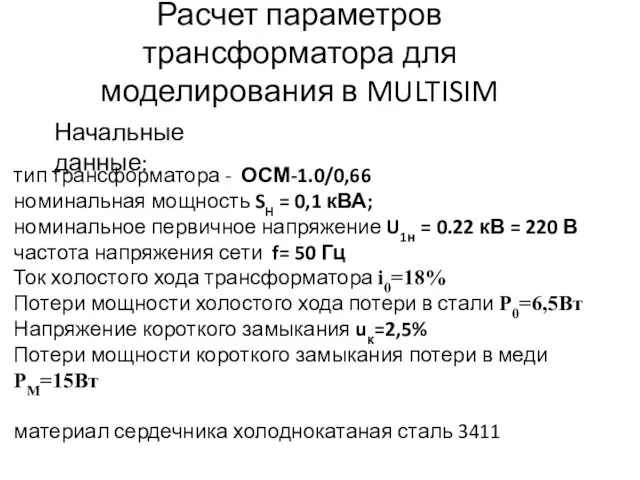 Расчет параметров трансформатора для моделирования в MULTISIM
Расчет параметров трансформатора для моделирования в MULTISIM Андезиты. Футеровка труб
Андезиты. Футеровка труб Викторина фото2
Викторина фото2 Производство и свойства тканей из химических волокон
Производство и свойства тканей из химических волокон Яхта
Яхта Competitors
Competitors Тварина - живий організм
Тварина - живий організм Конфессиональные особенности семьи
Конфессиональные особенности семьи Слайд шоу Птичкиной
Слайд шоу Птичкиной Новые ФСО 2022
Новые ФСО 2022 Подземное и наземное оборудование объектов нефтегазодобычи. Осмотр АГЗУ и выявление неисправностей. ННОУ ИПК НКИ
Подземное и наземное оборудование объектов нефтегазодобычи. Осмотр АГЗУ и выявление неисправностей. ННОУ ИПК НКИ Событие в кадре. Искусство фоторепортажа
Событие в кадре. Искусство фоторепортажа Фото Берлина
Фото Берлина Организация и управление коммерческой деятельностью в сфере розничной торговли (на примере ИП Казначеева Елена Николаевна)
Организация и управление коммерческой деятельностью в сфере розничной торговли (на примере ИП Казначеева Елена Николаевна) Новини школи №123
Новини школи №123 Великая Отечественная война
Великая Отечественная война Виды окрасов мопсов
Виды окрасов мопсов Horticulture of Great Britain
Horticulture of Great Britain Житие Блаженной Матроны Московской
Житие Блаженной Матроны Московской Кабельное ТВ в Великобритании
Кабельное ТВ в Великобритании концепт-прототип исследовательского марсохода
концепт-прототип исследовательского марсохода Narrow pelvis in obstetrics. Malposition
Narrow pelvis in obstetrics. Malposition Здравствуй, школа!
Здравствуй, школа! День посвящения в студенты
День посвящения в студенты