- Проект на тему Машина на дистанционном управлении

Содержание
- 2. 2015 год Подготовительный этап Обоснование и тема проекта Как то давно лет 9 назад мне подарили
- 3. Технологический этап При работе над проектом я пользовался интернетом для поиска информации К защите технологического проекта
- 4. 4
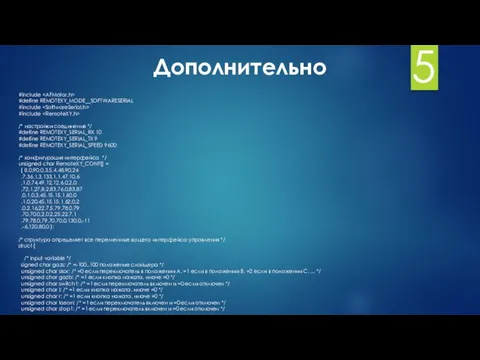
- 5. 5 Дополнительно #include #define REMOTEXY_MODE__SOFTWARESERIAL #include #include /* настройки соединения */ #define REMOTEXY_SERIAL_RX 10 #define REMOTEXY_SERIAL_TX
- 6. 6 1 2 3 4
- 7. Заключительный этап В результате изготовления Машинки на ДУ , я научился более правильно работать с радио
- 8. Себе стоимость изделия Примерная расчётная стоимость: Аккамуляторы ≈ 340 Канифоль Припой Всего ≈ 350 8
- 9. Испытание изделия Почти все что я хотел я сделать я сделал. Машина ездит, управление осуществляется с
- 10. Достоинства и недостатки Достоинства Работает Малая цена Небольшие затраты времени Недостатки Небольшая скорость 10
- 12. Скачать презентацию
2015 год
Подготовительный этап
Обоснование и тема проекта
Как то давно лет 9
2015 год
Подготовительный этап
Обоснование и тема проекта
Как то давно лет 9
Технологический этап
При работе над проектом я пользовался интернетом для поиска информации
Технологический этап
При работе над проектом я пользовался интернетом для поиска информации
4
4
5
Дополнительно
#include
#define REMOTEXY_MODE__SOFTWARESERIAL
#include
#include
/* настройки соединения */
5
Дополнительно
#include
#define REMOTEXY_MODE__SOFTWARESERIAL
#include
#include
/* настройки соединения */
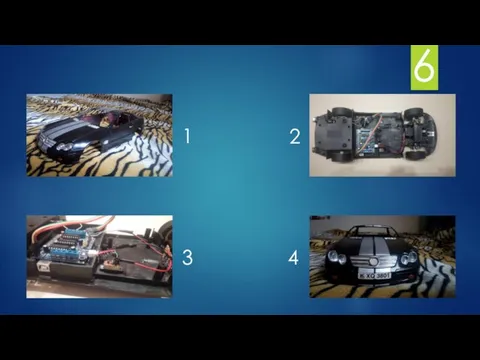
6
1
2
3
4
6
1
2
3
4
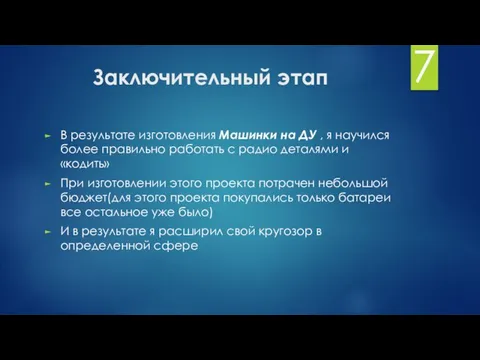
Заключительный этап
В результате изготовления Машинки на ДУ , я научился более
Заключительный этап
В результате изготовления Машинки на ДУ , я научился более
Себе стоимость изделия
Примерная расчётная стоимость:
Аккамуляторы ≈ 340
Канифоль
Припой
Всего ≈ 350
8
Себе стоимость изделия
Примерная расчётная стоимость:
Аккамуляторы ≈ 340
Канифоль
Припой
Всего ≈ 350
8
Испытание изделия
Почти все что я хотел я сделать я сделал. Машина
Испытание изделия
Почти все что я хотел я сделать я сделал. Машина
Достоинства и недостатки
Достоинства
Работает
Малая цена
Небольшие затраты времени
Недостатки
Небольшая
Достоинства и недостатки
Достоинства
Работает
Малая цена
Небольшие затраты времени
Недостатки
Небольшая
Похожие презентации
 Инженерно-гидрометеорологические изыскания Тема 7. Изыскания линий электропередач (ЛЭП)
Инженерно-гидрометеорологические изыскания Тема 7. Изыскания линий электропередач (ЛЭП) 20180304_na_puti_k_zhiznennomu_uspekhu
20180304_na_puti_k_zhiznennomu_uspekhu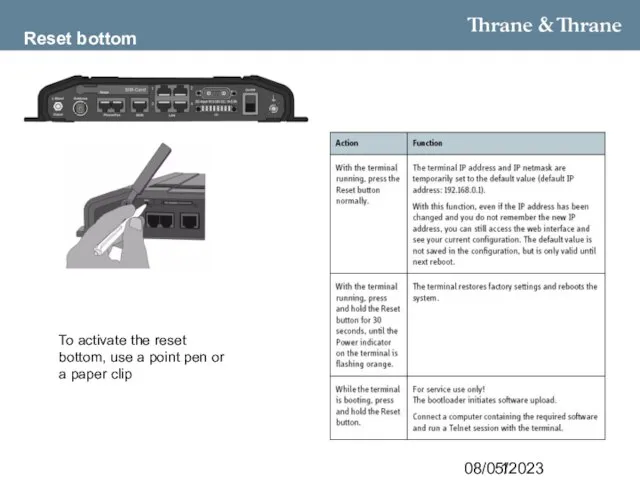 Reset bottom
Reset bottom Дружба с миром есть вражда против Бога
Дружба с миром есть вражда против Бога Actyon D20DT Engine
Actyon D20DT Engine Лесная прогулка
Лесная прогулка инструкция по МО (1) (1)
инструкция по МО (1) (1) 20141213_kultura_drevnego_egipta
20141213_kultura_drevnego_egipta Trimiteri Interne Trimiterile poștale interne sunt
Trimiteri Interne Trimiterile poștale interne sunt
 Угадай эмоции
Угадай эмоции По страницам любимых сказок
По страницам любимых сказок Алгоритмизация линейных, разветвляющихся и циклических алгоритмов
Алгоритмизация линейных, разветвляющихся и циклических алгоритмов Идент и аутентV3
Идент и аутентV3 Герои Великой Отечественной Войны
Герои Великой Отечественной Войны Машина резки труб ТРЕК-2М
Машина резки труб ТРЕК-2М Получение нутриентов методами биотехнологии
Получение нутриентов методами биотехнологии Знатоки Урала
Знатоки Урала Коллаж мамочка с днем рождения
Коллаж мамочка с днем рождения 20120217_vtoraya_mirovaya_voyna
20120217_vtoraya_mirovaya_voyna 20130421_baba_yaga
20130421_baba_yaga 20121228_koz-moyo2
20121228_koz-moyo2 кл.1 урок
кл.1 урок Фотоальбом
Фотоальбом гармония земля
гармония земля Respond & Achieve. Цифровая транкинговая система Hytera XPT
Respond & Achieve. Цифровая транкинговая система Hytera XPT Фрезерные приспособления
Фрезерные приспособления Arterial hypertension
Arterial hypertension