Проектно-баллистические исследования проблемы управления спуском перспективного пилотируемого корабля
- Проектно-баллистические исследования проблемы управления спуском перспективного пилотируемого корабля

Содержание
- 2. ● В Российской Федерации создаётся многоцелевой пилотируемый корабль нового поколения (ПТК НП), одно из назначений –
- 3. ОСОБЕННОСТИ ПОСАДКИ СПУСКАЕМЫХ АППАРАТОВ КОРАБЛЕЙ «СОЮЗ МС» Районы посадки на территории Республики Казахстан Область рассеивания точек
- 4. ОБОСНОВАНИЕ ТРЕБУЕМОЙ ТОЧНОСТИ УПРАВЛЕНИЯ СПУСКОМ ВА ПТК Районы штатной посадки ВА на территории России Парашютирование ВА
- 5. ПРОБЛЕМЫ БЕЗОПАСНОСТИ ЗАВЕРШЕНИЯ ПОЛЁТА ДВИГАТЕЛЬНОГО ОТСЕКА Двигательный отсек ПТК ● масса ДО на момент разделения отсеков
- 6. РАЙОН ЗАТОПЛЕНИЯ ДВИГАТЕЛЬНОГО ОТСЕКА ● район расположен в южной части Тихого океана ● протяжённость водной части
- 7. СХЕМА БЕЗОПАСНОГО ЗАВЕРШЕНИЯ ПОЛЁТА ПТК
- 8. ● анализ требуемого состава и точности навигационных измерений текущих параметров траектории спуска ВА в плотных слоях
- 9. ● разработка метода и алгоритма решения задачи прицеливания при выборе параметров тормозного импульса схода ПТК с
- 10. КОМПЛЕКСНОЕ БАЛЛИСТИЧЕСКОЕ ИССЛЕДОВАНИЕ ВОПРОСОВ ПОСТРОЕНИЯ КОМБИНИРОВАННОЙ СИСТЕМЫ ВЫСОКОТОЧНОГО УПРАВЛЕНИЯ СПУСКОМ Метод и результаты оценки предельной точности
- 11. РЕШЕНИЕ ЗАДАЧИ НАВИГАЦИИ ВА НА АТМОСФЕРНОМ УЧАСТКЕ СПУСКА Анализ точности автономной инерциальной навигационной системы Ошибки БИНС
- 12. СХЕМА РАБОТЫ КОМБИНИРОВАННОЙ СУС, ИСПОЛЬЗУЮЩЕЙ СПУТНИКОВУЮ НАВИГАЦИОННУЮ ИНФОРМАЦИЮ Условие реализуемости комбинированной СУС Достаточность маневренных возможностей ВА
- 13. БАЛЛИСТИЧЕСКОЕ ОБОСНОВАНИЕ РЕАЛИЗУЕМОСТИ КОМБИНИРОВАННОЙ СУС Постановка задачи : ● определить высоту начала участка терминального наведения hтн
- 14. Баллистическое проектирование номинальной траектории спуска для обеспечения оптимальных условий работы комбинированной СУС Постановка задачи: определить зависимость
- 15. Анализ эффективности применения квазиоптимальной номинальной траектории Профиль перегрузки для квазиоптимальной траектории Профиль равновесной температуры в критической
- 16. Принцип управления на автономном участке наведения (управление относительно опорной траектории) Принцип управления на участке высокоточного наведения
- 17. СТРУКТУРНАЯ СХЕМА КОМПЛЕКСА АЛГОРИТМОВ ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
- 18. ДИСКРЕТНЫЙ МНОГОШАГОВЫЙ АЛГОРИТМ ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ Анализ управляемости динамической системы «ВА – прицельная точка» Вид зоны манёвра
- 19. ИССЛЕДОВАНИЯ ОСОБЕННОСТЕЙ ДВИЖЕНИЯ ЦЕНТРА МАСС ВА НА КОНЕЧНОМ УЧАСТКЕ НАВЕДЕНИЯ Задачи исследования: ● анализ изменения параметров
- 20. О ЗАДАЧАХ СТАБИЛИЗАЦИИ ВА В КАНАЛЕ КРЕНА ● процесс стабилизации не должен ухудшать показателей качества решения
- 21. ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК КОМБИНИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ СПУСКОМ Метод исследования: статистическое моделирование Схема вычислительного эксперимента: ● решение краевой
- 22. ОЦЕНКА ТОЧНОСТИ ПРИВЕДЕНИЯ ВА ПРИ ИДЕАЛЬНОЙ СТАБИЛИЗАЦИИ В КАНАЛЕ КРЕНА
- 23. ОЦЕНКА ВЛИЯНИЯ МАКСИМАЛЬНОЙ УГЛОВОЙ СКОРОСТИ РАЗВОРОТОВ ВА ПО КРЕНУ НА ТОЧНОСТЬ ПРИВЕДЕНИЯ Область рассеивания точек приведения
- 24. АНАЛИЗ ПРОЦЕССА ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ Пример изменения параметров управления Пример траектории прогнозируемого центра зоны манёвра ВА Пример
- 25. АНАЛИЗ ПЕРЕГРУЗОЧНОГО РЕЖИМА СПУСКА Перегрузочный режим без ограничения величины максимальной перегрузки Анализ возможности ограничения величины максимальной
- 26. МЕТОД РЕШЕНИЯ ЗАДАЧИ ПРИЦЕЛИВАНИЯ ДЛЯ ГАРАНТИРОВАННОГО ВЫСОКОТОЧНОГО ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ Схема прицеливания при спуске с ОИСЗ Влияние
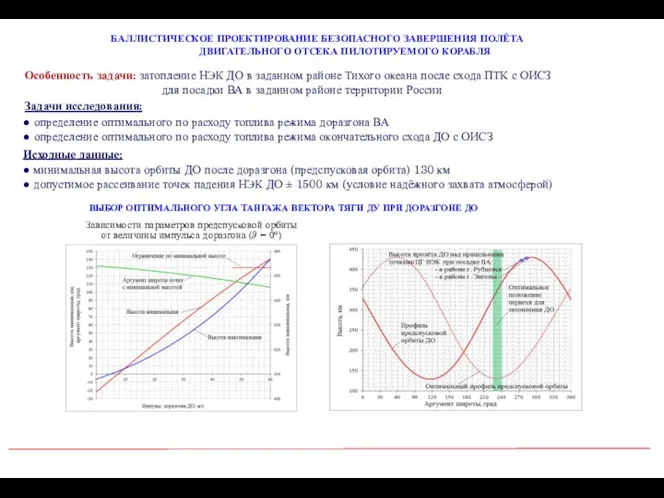
- 27. БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ БЕЗОПАСНОГО ЗАВЕРШЕНИЯ ПОЛЁТА ДВИГАТЕЛЬНОГО ОТСЕКА ПИЛОТИРУЕМОГО КОРАБЛЯ Задачи исследования: ● определение оптимального по расходу
- 28. Алгоритм оптимизации (метод наискорейшего спуска) ● рекомендуемый угол тангажа вектора тяги ДО при доразгоне ДО +20°
- 29. МИНИМИЗАЦИЯ РАСХОДА ТОПЛИВА НА ОКОНЧАТЕЛЬНЫЙ СХОД ДО С ОРБИТЫ ● минимизация рассеивания НЭК ДО путём организации
- 30. Составляющие продольного рассеивания НЭК ДО Алгоритм терминального наведения при сходе с орбиты
- 31. РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ: ● суммарный расход топлива на безопасное завершение полёта ДО (без учёта расхода на ориентацию)
- 33. Скачать презентацию
● В Российской Федерации создаётся многоцелевой
пилотируемый корабль нового поколения (ПТК
● В Российской Федерации создаётся многоцелевой
пилотируемый корабль нового поколения (ПТК
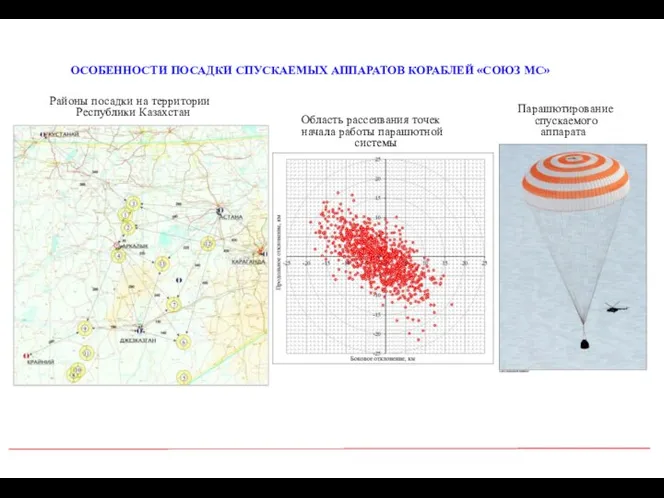
ОСОБЕННОСТИ ПОСАДКИ СПУСКАЕМЫХ АППАРАТОВ КОРАБЛЕЙ «СОЮЗ МС»
Районы посадки на территории
Республики
ОСОБЕННОСТИ ПОСАДКИ СПУСКАЕМЫХ АППАРАТОВ КОРАБЛЕЙ «СОЮЗ МС»
Районы посадки на территории
Республики

ОБОСНОВАНИЕ ТРЕБУЕМОЙ ТОЧНОСТИ УПРАВЛЕНИЯ СПУСКОМ ВА ПТК
Районы штатной посадки ВА на
ОБОСНОВАНИЕ ТРЕБУЕМОЙ ТОЧНОСТИ УПРАВЛЕНИЯ СПУСКОМ ВА ПТК
Районы штатной посадки ВА на
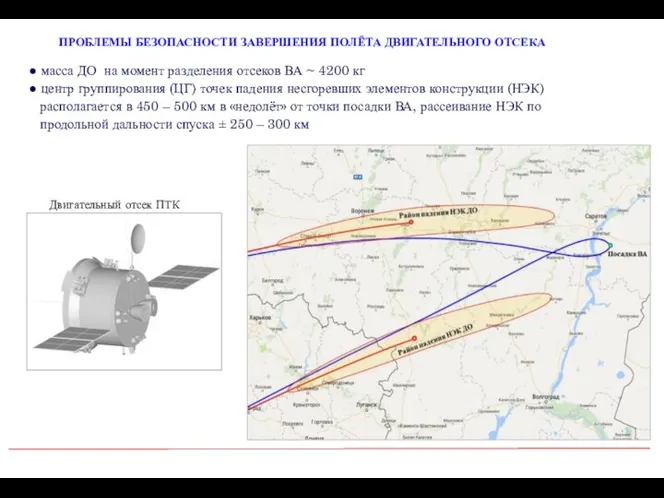
ПРОБЛЕМЫ БЕЗОПАСНОСТИ ЗАВЕРШЕНИЯ ПОЛЁТА ДВИГАТЕЛЬНОГО ОТСЕКА
Двигательный отсек ПТК
● масса ДО на
ПРОБЛЕМЫ БЕЗОПАСНОСТИ ЗАВЕРШЕНИЯ ПОЛЁТА ДВИГАТЕЛЬНОГО ОТСЕКА
Двигательный отсек ПТК
● масса ДО на
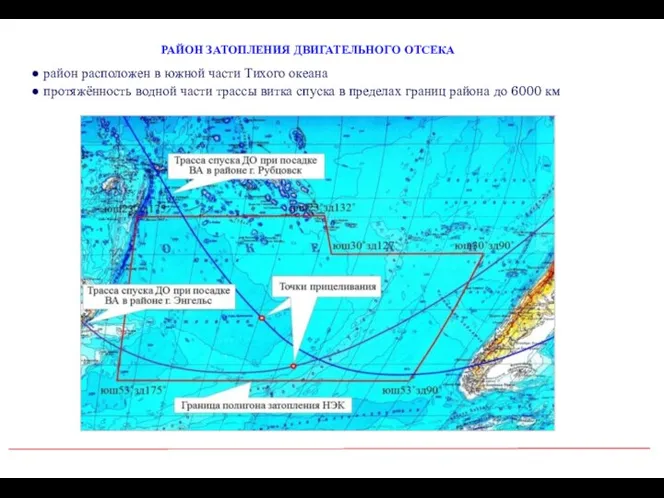
РАЙОН ЗАТОПЛЕНИЯ ДВИГАТЕЛЬНОГО ОТСЕКА
● район расположен в южной части Тихого океана
●
РАЙОН ЗАТОПЛЕНИЯ ДВИГАТЕЛЬНОГО ОТСЕКА
● район расположен в южной части Тихого океана
●
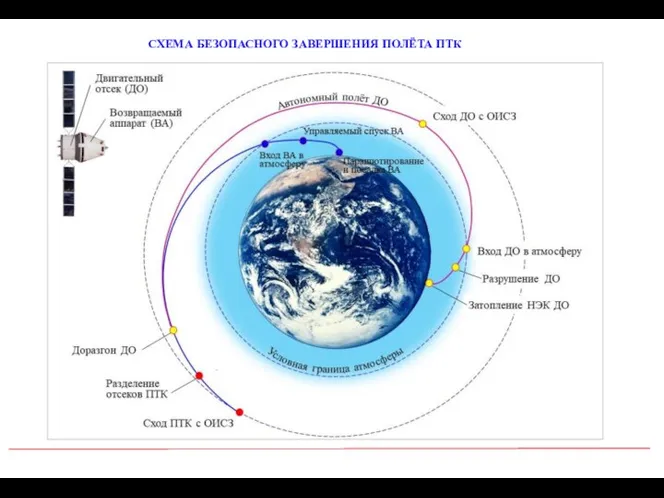
СХЕМА БЕЗОПАСНОГО ЗАВЕРШЕНИЯ ПОЛЁТА ПТК
СХЕМА БЕЗОПАСНОГО ЗАВЕРШЕНИЯ ПОЛЁТА ПТК
● анализ требуемого состава и точности навигационных измерений текущих параметров
траектории
● анализ требуемого состава и точности навигационных измерений текущих параметров
траектории
● разработка метода и алгоритма решения задачи прицеливания при выборе параметров
● разработка метода и алгоритма решения задачи прицеливания при выборе параметров
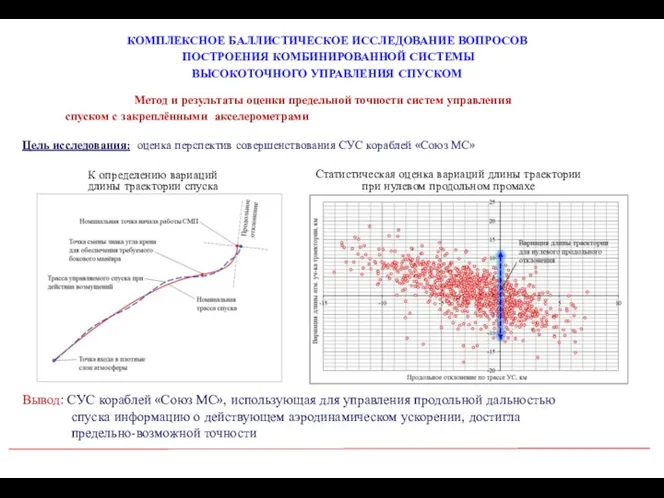
КОМПЛЕКСНОЕ БАЛЛИСТИЧЕСКОЕ ИССЛЕДОВАНИЕ ВОПРОСОВ
ПОСТРОЕНИЯ КОМБИНИРОВАННОЙ СИСТЕМЫ
ВЫСОКОТОЧНОГО УПРАВЛЕНИЯ СПУСКОМ
Метод
КОМПЛЕКСНОЕ БАЛЛИСТИЧЕСКОЕ ИССЛЕДОВАНИЕ ВОПРОСОВ
ПОСТРОЕНИЯ КОМБИНИРОВАННОЙ СИСТЕМЫ
ВЫСОКОТОЧНОГО УПРАВЛЕНИЯ СПУСКОМ
Метод
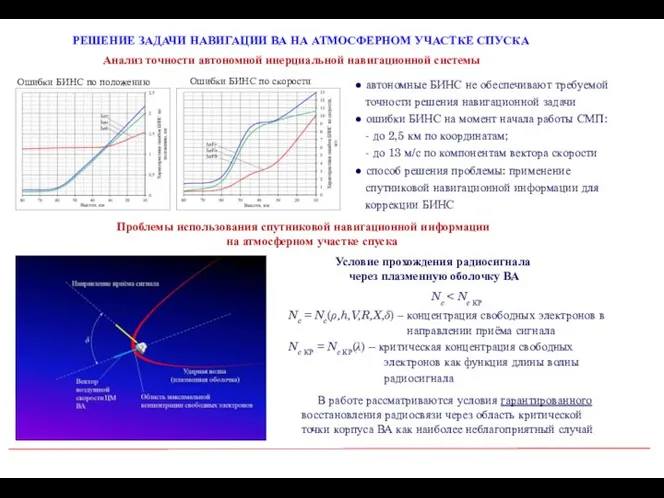
РЕШЕНИЕ ЗАДАЧИ НАВИГАЦИИ ВА НА АТМОСФЕРНОМ УЧАСТКЕ СПУСКА
Анализ точности автономной инерциальной
РЕШЕНИЕ ЗАДАЧИ НАВИГАЦИИ ВА НА АТМОСФЕРНОМ УЧАСТКЕ СПУСКА
Анализ точности автономной инерциальной
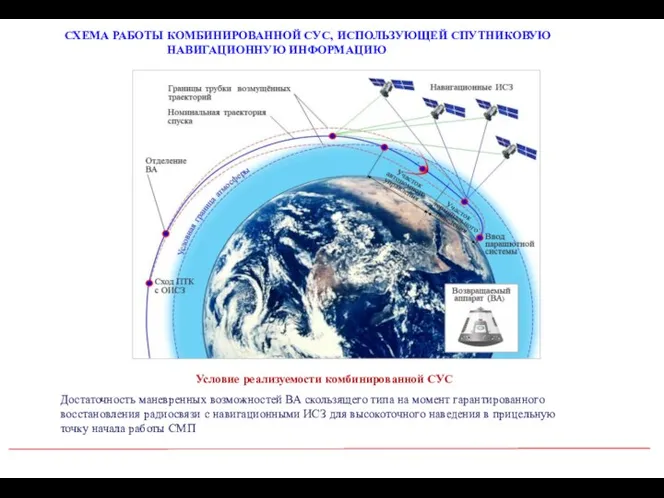
СХЕМА РАБОТЫ КОМБИНИРОВАННОЙ СУС, ИСПОЛЬЗУЮЩЕЙ СПУТНИКОВУЮ
НАВИГАЦИОННУЮ ИНФОРМАЦИЮ
Условие реализуемости комбинированной СУС
СХЕМА РАБОТЫ КОМБИНИРОВАННОЙ СУС, ИСПОЛЬЗУЮЩЕЙ СПУТНИКОВУЮ
НАВИГАЦИОННУЮ ИНФОРМАЦИЮ
Условие реализуемости комбинированной СУС
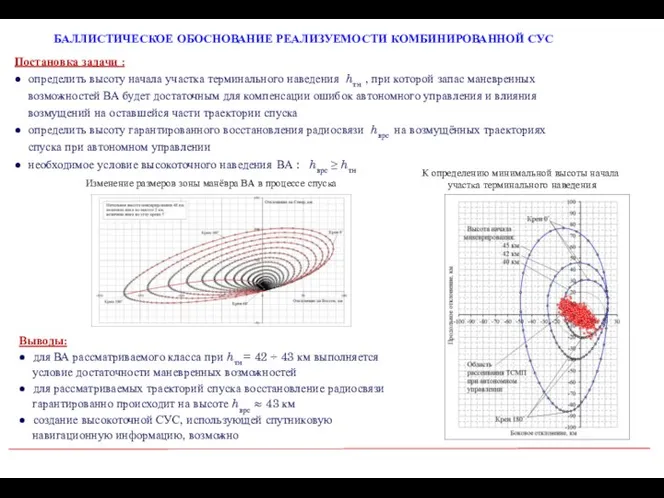
БАЛЛИСТИЧЕСКОЕ ОБОСНОВАНИЕ РЕАЛИЗУЕМОСТИ КОМБИНИРОВАННОЙ СУС
Постановка задачи :
● определить высоту начала
БАЛЛИСТИЧЕСКОЕ ОБОСНОВАНИЕ РЕАЛИЗУЕМОСТИ КОМБИНИРОВАННОЙ СУС
Постановка задачи :
● определить высоту начала
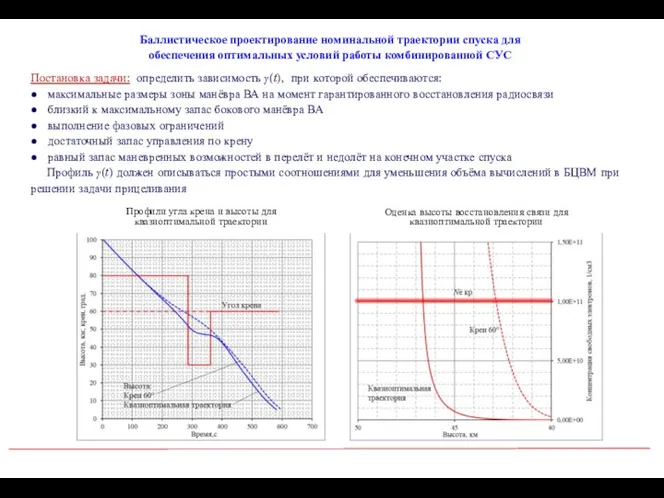
Баллистическое проектирование номинальной траектории спуска для обеспечения оптимальных условий работы комбинированной
Баллистическое проектирование номинальной траектории спуска для обеспечения оптимальных условий работы комбинированной
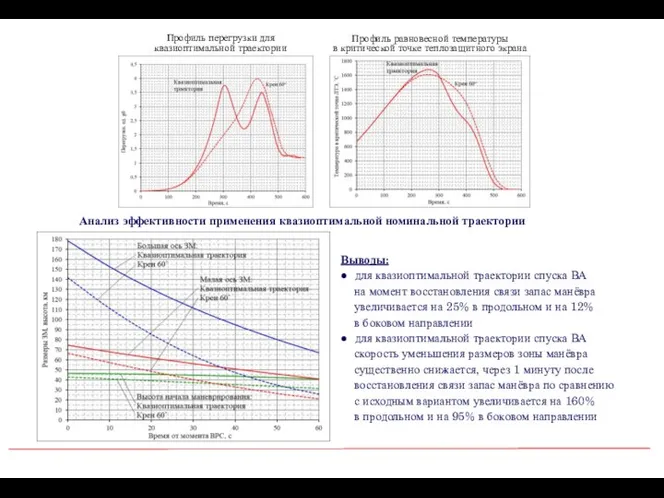
Анализ эффективности применения квазиоптимальной номинальной траектории
Профиль перегрузки для квазиоптимальной траектории
Профиль
Анализ эффективности применения квазиоптимальной номинальной траектории
Профиль перегрузки для квазиоптимальной траектории
Профиль
Принцип управления на автономном участке наведения
(управление относительно опорной траектории)
Принцип управления
Принцип управления на автономном участке наведения
(управление относительно опорной траектории)
Принцип управления
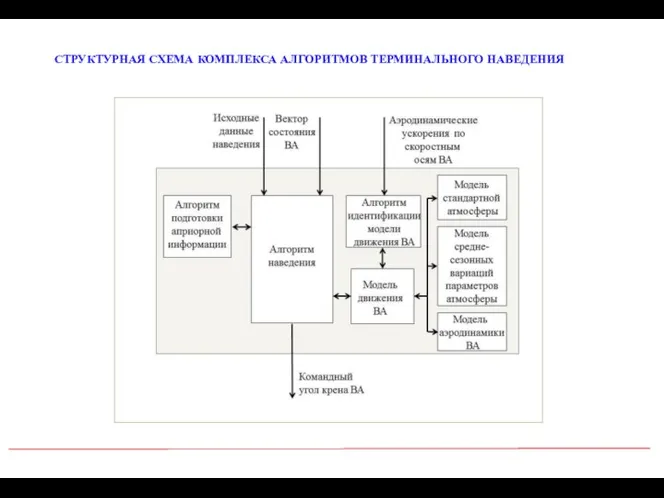
СТРУКТУРНАЯ СХЕМА КОМПЛЕКСА АЛГОРИТМОВ ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
СТРУКТУРНАЯ СХЕМА КОМПЛЕКСА АЛГОРИТМОВ ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
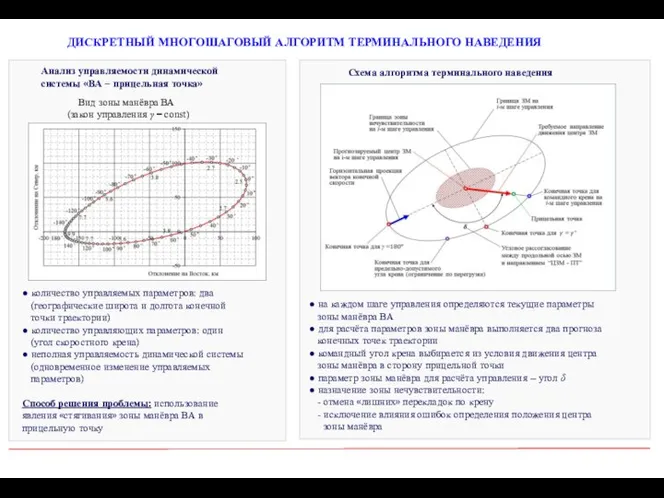
ДИСКРЕТНЫЙ МНОГОШАГОВЫЙ АЛГОРИТМ ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
Анализ управляемости динамической
системы «ВА – прицельная
ДИСКРЕТНЫЙ МНОГОШАГОВЫЙ АЛГОРИТМ ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
Анализ управляемости динамической
системы «ВА – прицельная
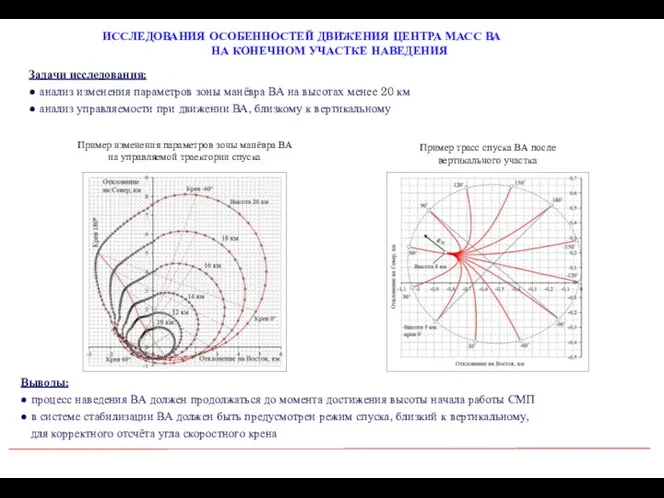
ИССЛЕДОВАНИЯ ОСОБЕННОСТЕЙ ДВИЖЕНИЯ ЦЕНТРА МАСС ВА
НА КОНЕЧНОМ УЧАСТКЕ НАВЕДЕНИЯ
Задачи исследования:
●
ИССЛЕДОВАНИЯ ОСОБЕННОСТЕЙ ДВИЖЕНИЯ ЦЕНТРА МАСС ВА
НА КОНЕЧНОМ УЧАСТКЕ НАВЕДЕНИЯ
Задачи исследования:
●
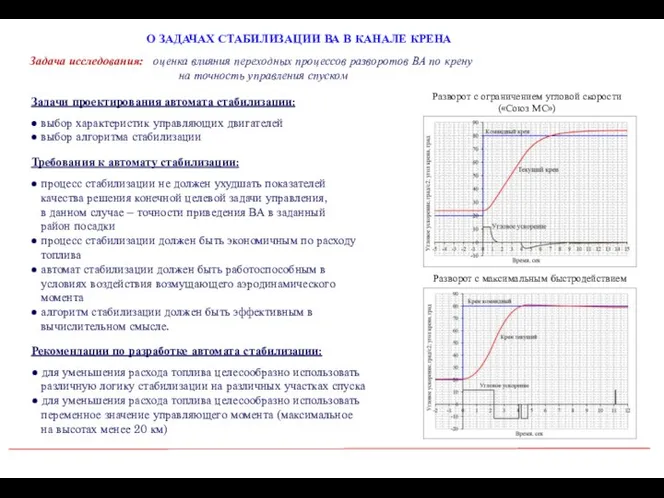
О ЗАДАЧАХ СТАБИЛИЗАЦИИ ВА В КАНАЛЕ КРЕНА
● процесс стабилизации не должен
О ЗАДАЧАХ СТАБИЛИЗАЦИИ ВА В КАНАЛЕ КРЕНА
● процесс стабилизации не должен
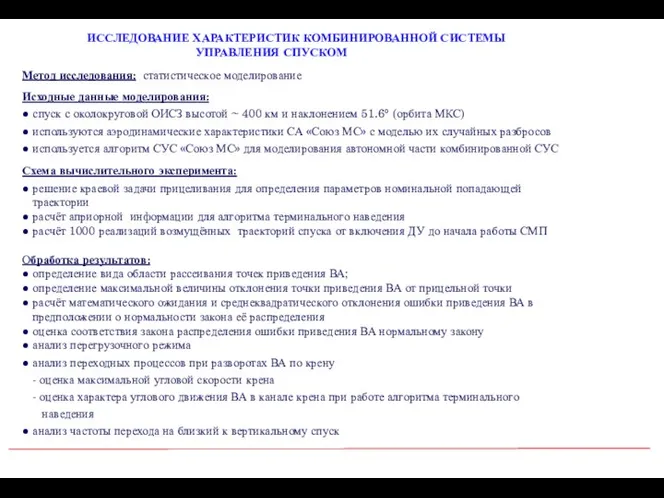
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК КОМБИНИРОВАННОЙ СИСТЕМЫ
УПРАВЛЕНИЯ СПУСКОМ
Метод исследования: статистическое моделирование
Схема вычислительного
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК КОМБИНИРОВАННОЙ СИСТЕМЫ
УПРАВЛЕНИЯ СПУСКОМ
Метод исследования: статистическое моделирование
Схема вычислительного
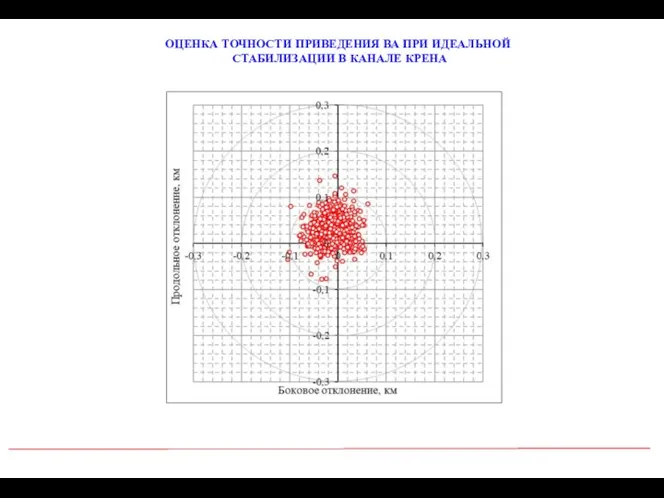
ОЦЕНКА ТОЧНОСТИ ПРИВЕДЕНИЯ ВА ПРИ ИДЕАЛЬНОЙ
СТАБИЛИЗАЦИИ В КАНАЛЕ КРЕНА
ОЦЕНКА ТОЧНОСТИ ПРИВЕДЕНИЯ ВА ПРИ ИДЕАЛЬНОЙ
СТАБИЛИЗАЦИИ В КАНАЛЕ КРЕНА
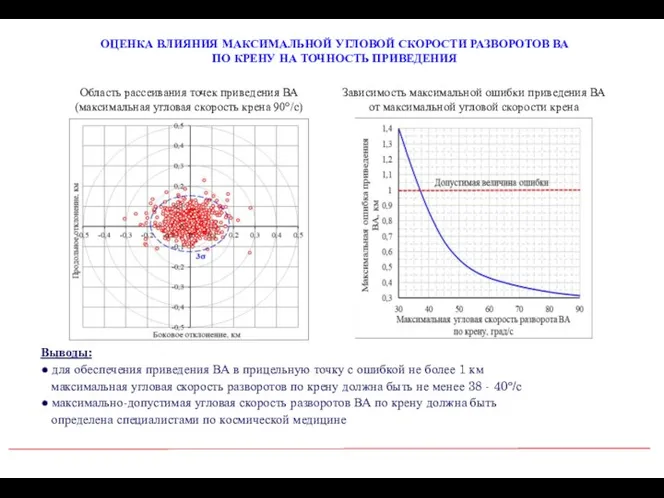
ОЦЕНКА ВЛИЯНИЯ МАКСИМАЛЬНОЙ УГЛОВОЙ СКОРОСТИ РАЗВОРОТОВ ВА
ПО КРЕНУ НА ТОЧНОСТЬ ПРИВЕДЕНИЯ
Область
ОЦЕНКА ВЛИЯНИЯ МАКСИМАЛЬНОЙ УГЛОВОЙ СКОРОСТИ РАЗВОРОТОВ ВА
ПО КРЕНУ НА ТОЧНОСТЬ ПРИВЕДЕНИЯ
Область
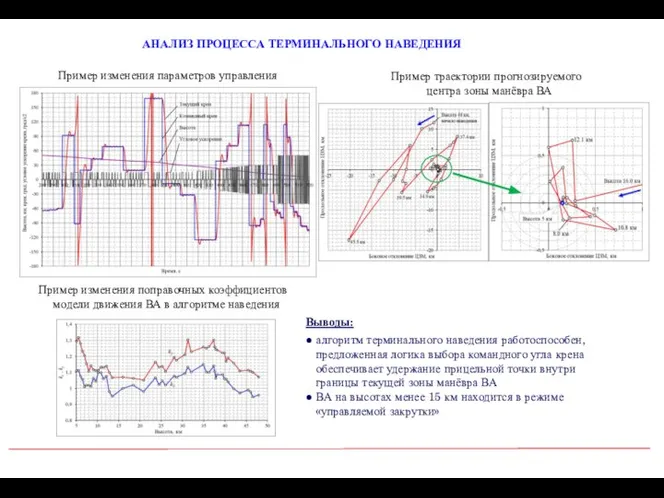
АНАЛИЗ ПРОЦЕССА ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
Пример изменения параметров управления
Пример траектории прогнозируемого
центра зоны
АНАЛИЗ ПРОЦЕССА ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
Пример изменения параметров управления
Пример траектории прогнозируемого
центра зоны
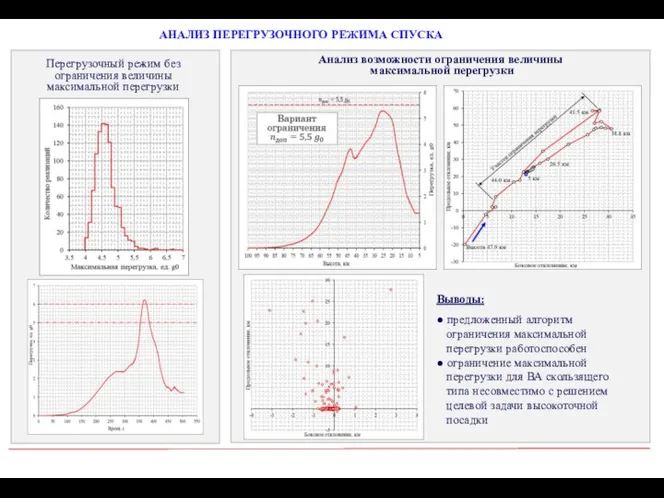
АНАЛИЗ ПЕРЕГРУЗОЧНОГО РЕЖИМА СПУСКА
Перегрузочный режим без
ограничения величины
максимальной перегрузки
Анализ возможности ограничения величины
АНАЛИЗ ПЕРЕГРУЗОЧНОГО РЕЖИМА СПУСКА
Перегрузочный режим без
ограничения величины
максимальной перегрузки
Анализ возможности ограничения величины
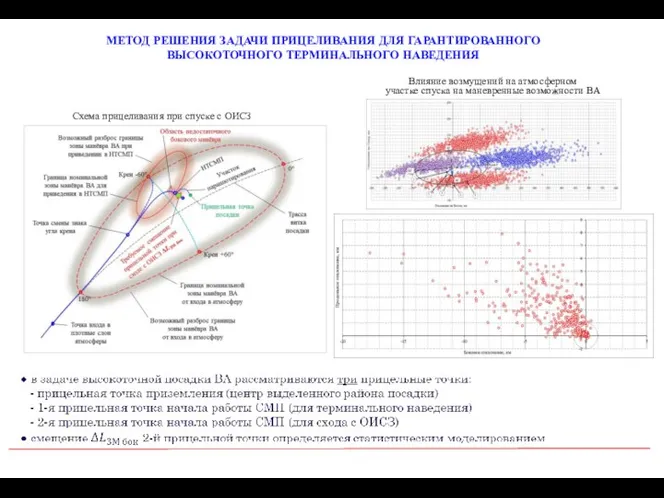
МЕТОД РЕШЕНИЯ ЗАДАЧИ ПРИЦЕЛИВАНИЯ ДЛЯ ГАРАНТИРОВАННОГО
ВЫСОКОТОЧНОГО ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
Схема прицеливания при
МЕТОД РЕШЕНИЯ ЗАДАЧИ ПРИЦЕЛИВАНИЯ ДЛЯ ГАРАНТИРОВАННОГО
ВЫСОКОТОЧНОГО ТЕРМИНАЛЬНОГО НАВЕДЕНИЯ
Схема прицеливания при
БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ БЕЗОПАСНОГО ЗАВЕРШЕНИЯ ПОЛЁТА
ДВИГАТЕЛЬНОГО ОТСЕКА ПИЛОТИРУЕМОГО КОРАБЛЯ
Задачи исследования:
●
БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ БЕЗОПАСНОГО ЗАВЕРШЕНИЯ ПОЛЁТА
ДВИГАТЕЛЬНОГО ОТСЕКА ПИЛОТИРУЕМОГО КОРАБЛЯ
Задачи исследования:
●
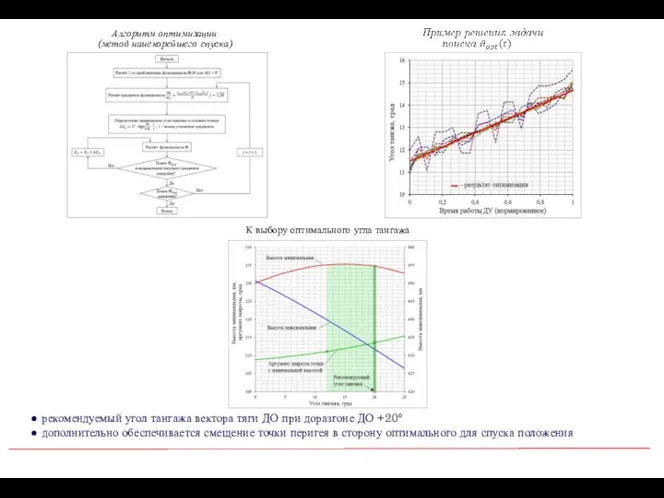
Алгоритм оптимизации
(метод наискорейшего спуска)
● рекомендуемый угол тангажа вектора
Алгоритм оптимизации
(метод наискорейшего спуска)
● рекомендуемый угол тангажа вектора
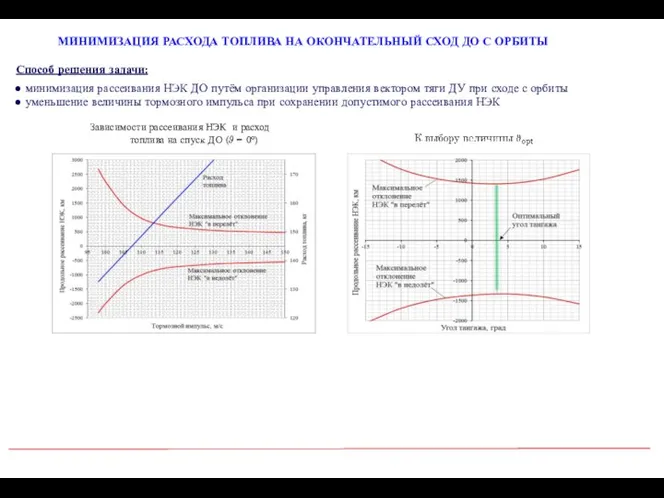
МИНИМИЗАЦИЯ РАСХОДА ТОПЛИВА НА ОКОНЧАТЕЛЬНЫЙ СХОД ДО С ОРБИТЫ
● минимизация
МИНИМИЗАЦИЯ РАСХОДА ТОПЛИВА НА ОКОНЧАТЕЛЬНЫЙ СХОД ДО С ОРБИТЫ
● минимизация
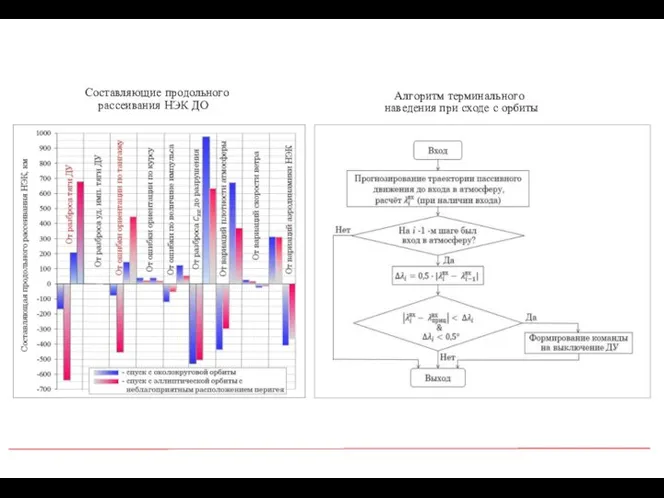
Составляющие продольного
рассеивания НЭК ДО
Алгоритм терминального
наведения при сходе
Составляющие продольного
рассеивания НЭК ДО
Алгоритм терминального
наведения при сходе
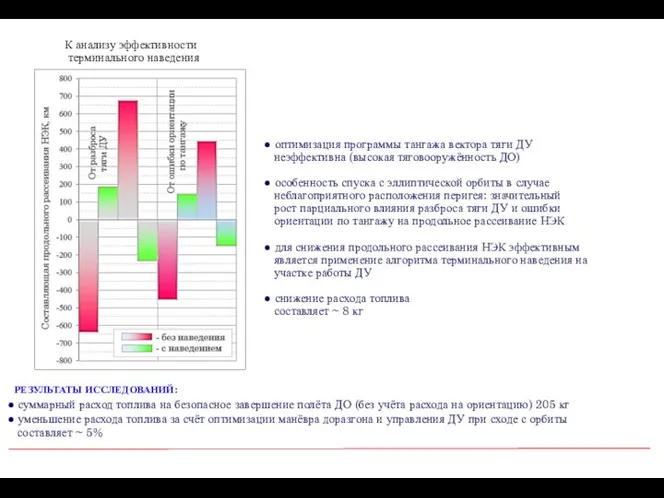
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ:
● суммарный расход топлива на безопасное завершение полёта ДО
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ:
● суммарный расход топлива на безопасное завершение полёта ДО
 20140830_poeticheskaya_masterskaya
20140830_poeticheskaya_masterskaya Согласные. Корейский язык. (Урок 3)
Согласные. Корейский язык. (Урок 3) Introduction robot: a mechanic al piece robots and robotics intelligent systems computation and search tools. Math review
Introduction robot: a mechanic al piece robots and robotics intelligent systems computation and search tools. Math review Штампы
Штампы Юг металлопроцессинг - итоги 2015 г
Юг металлопроцессинг - итоги 2015 г Проектирование вертолета
Проектирование вертолета Деннис Ритчи и его вклад в развитие операционных систем
Деннис Ритчи и его вклад в развитие операционных систем Избрание Иисусом Христом учеников
Избрание Иисусом Христом учеников Анализ работы механизированного фонда нефтяных скважин на хохряковском месторождении
Анализ работы механизированного фонда нефтяных скважин на хохряковском месторождении 1__
1__ Техническая инвентаризация инженерных сооружений (тема 4.7)
Техническая инвентаризация инженерных сооружений (тема 4.7) Истории нашего детства
Истории нашего детства День Земли
День Земли Портфель ДПП_7-8.09.2022
Портфель ДПП_7-8.09.2022 Бессмертный полк. Книга памяти семьи Осеевых, Гараниных, Миловановых, Масаловых и их ветвей
Бессмертный полк. Книга памяти семьи Осеевых, Гараниных, Миловановых, Масаловых и их ветвей Правописание союзов тоже, также, чтобы, зато
Правописание союзов тоже, также, чтобы, зато Зображення тварин
Зображення тварин Зимний пейзаж
Зимний пейзаж № 9. Презентация - Яркое царство пернатых ( о птицах)
№ 9. Презентация - Яркое царство пернатых ( о птицах)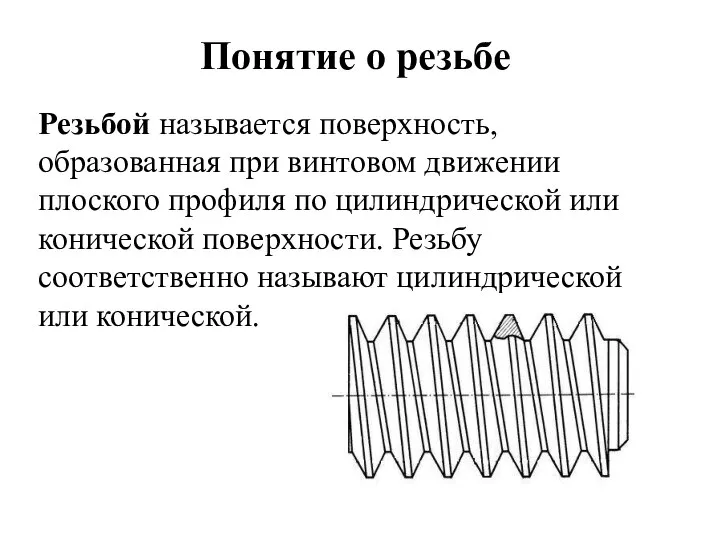 Понятие о резьбе
Понятие о резьбе Тонколистовой металл и проволока
Тонколистовой металл и проволока 20121218_psihologo-pedagogicheskoe_obespechenie_processa_adaptacii_uchashchihsya_15_klass_novaya_0
20121218_psihologo-pedagogicheskoe_obespechenie_processa_adaptacii_uchashchihsya_15_klass_novaya_0 Электропроводки
Электропроводки Ангара
Ангара разновидности танцев пр
разновидности танцев пр Модуль ввода сигналов термоэлектрических преобразователей, термопреобразователей сопротивления и унифицированных сигналов тока
Модуль ввода сигналов термоэлектрических преобразователей, термопреобразователей сопротивления и унифицированных сигналов тока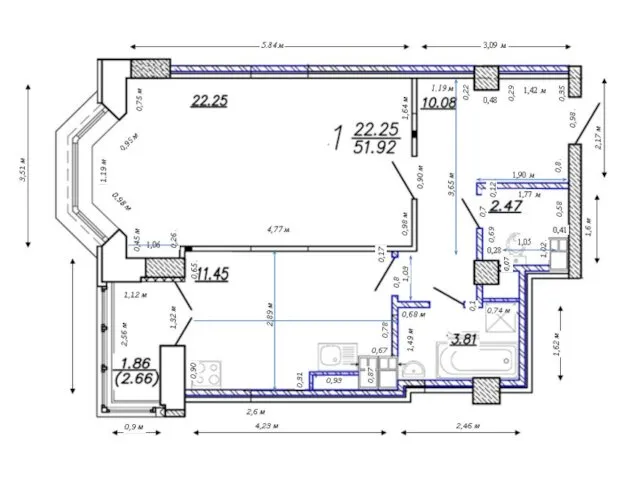 План-схема перепланировки помещения. Квартира №78
План-схема перепланировки помещения. Квартира №78 Презентация для 1 класса. (1)
Презентация для 1 класса. (1)