- Разработка line following robot

Содержание
- 2. Создать универсальную беспилотную платформу, способную выполнять действия, а именно: перемещаться по горизонтали по черной полосе ЦЕЛЬ
- 3. ЗАДАЧИ: Ознакомление с системами управления роботов . Поиск материалов и опциональных деталей для создания робота. Написание
- 4. АКТУАЛЬНОСТЬ Будущее
- 5. УПРАВЛЕНИЕ РОБОТОМ
- 6. ПРОГРАММИРОВАНИЕ Язык прошивки Си компилированный в Hex
- 7. ОСНОВНЫЕ КОМПОНЕНТЫ РОБОТА 2 колеса Текстолит Два мотора Схема L293D Микр Atmega8 Фоторезистор Источник питания
- 8. ЛАЗЕРНО-УТЮЖНАЯ ТЕХНОЛОГИЯ Достоинства: Весьма высокая скорость травления. Не оставляет грязных пятен Процесс быстро протекает при комнатной
- 9. ПРОЦЕСС РЕАЛИЗАЦИИ
- 10. СБОРКА
- 11. РЕЗУЛЬТАТ РАБОТЫ
- 13. Скачать презентацию
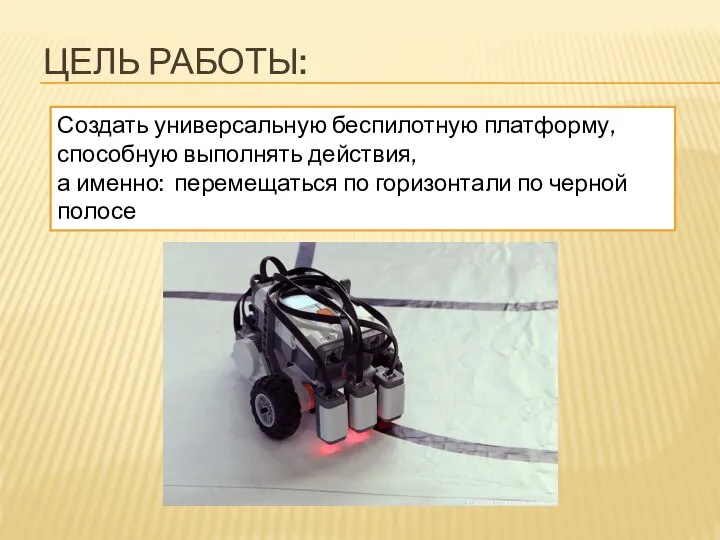
Создать универсальную беспилотную платформу, способную выполнять действия,
а именно: перемещаться по
Создать универсальную беспилотную платформу, способную выполнять действия,
а именно: перемещаться по
ЗАДАЧИ:
Ознакомление с системами управления роботов .
Поиск материалов и опциональных деталей
ЗАДАЧИ:
Ознакомление с системами управления роботов .
Поиск материалов и опциональных деталей

АКТУАЛЬНОСТЬ
Будущее
АКТУАЛЬНОСТЬ
Будущее

УПРАВЛЕНИЕ РОБОТОМ
УПРАВЛЕНИЕ РОБОТОМ
ПРОГРАММИРОВАНИЕ
Язык прошивки Си компилированный в Hex
ПРОГРАММИРОВАНИЕ
Язык прошивки Си компилированный в Hex

ОСНОВНЫЕ КОМПОНЕНТЫ РОБОТА
2 колеса
Текстолит
Два мотора
Схема L293D
Микр Atmega8
Фоторезистор
Источник питания
ОСНОВНЫЕ КОМПОНЕНТЫ РОБОТА
2 колеса
Текстолит
Два мотора
Схема L293D
Микр Atmega8
Фоторезистор
Источник питания
ЛАЗЕРНО-УТЮЖНАЯ ТЕХНОЛОГИЯ
Достоинства:
Весьма высокая скорость травления.
Не оставляет грязных пятен
Процесс быстро протекает
ЛАЗЕРНО-УТЮЖНАЯ ТЕХНОЛОГИЯ
Достоинства:
Весьма высокая скорость травления.
Не оставляет грязных пятен
Процесс быстро протекает
ПРОЦЕСС РЕАЛИЗАЦИИ
ПРОЦЕСС РЕАЛИЗАЦИИ
СБОРКА
СБОРКА
РЕЗУЛЬТАТ РАБОТЫ
РЕЗУЛЬТАТ РАБОТЫ
 Запишем обыкновенной дробью, какая часть площади многоугольника закрашена
Запишем обыкновенной дробью, какая часть площади многоугольника закрашена ССО “АТОМ им. Г.И. Егорова”, Томская область. Достижения комсостава отряда
ССО “АТОМ им. Г.И. Егорова”, Томская область. Достижения комсостава отряда Градостроительство и типы планировочной структуры городов
Градостроительство и типы планировочной структуры городов ҚазАгро ұлттық басқарушы холдингі
ҚазАгро ұлттық басқарушы холдингі Тестовая контрольная работа Деление на двузначное число
Тестовая контрольная работа Деление на двузначное число Святые мученицы Вера , Надежда , Любовь и матерь их София
Святые мученицы Вера , Надежда , Любовь и матерь их София Celebrity presentation
Celebrity presentation Развитие транспортной инфраструктуры в России
Развитие транспортной инфраструктуры в России Здоровье души
Здоровье души Эффективное управление тепловой энергией (центральные/автономные системы отопления)
Эффективное управление тепловой энергией (центральные/автономные системы отопления) 9 вариантов ГИА
9 вариантов ГИА Опыт вакуумной закалки и цементации на печах seco/warwick
Опыт вакуумной закалки и цементации на печах seco/warwick С Днём Учителя!
С Днём Учителя! Профессиональный модуль (ПМ 01). Организация проведения технических осмотров
Профессиональный модуль (ПМ 01). Организация проведения технических осмотров Изготовление набора кухонного инвентаря с элементами художественной резьбы
Изготовление набора кухонного инвентаря с элементами художественной резьбы Лекция 4
Лекция 4 Ключевая фраза, характеризующая продукт или технологию
Ключевая фраза, характеризующая продукт или технологию Изготовление чертежа фартука на поясе
Изготовление чертежа фартука на поясе Книга – наш лучший друг!
Книга – наш лучший друг! Жизнь на конюшне
Жизнь на конюшне Анализ систем телемеханики электрифицированных железных дорог
Анализ систем телемеханики электрифицированных железных дорог We build, because we design
We build, because we design Система пуска. Пусковой двигатель
Система пуска. Пусковой двигатель Проект: Профессии
Проект: Профессии Проект интерьера гостиной в эко-стиле
Проект интерьера гостиной в эко-стиле bloc quebecois
bloc quebecois 20121017_kto_takie_ryby
20121017_kto_takie_ryby Вертикально-интегрированный птицекомплекс по промышленному производству и переработке мяса индейки в Хабаровском крае
Вертикально-интегрированный птицекомплекс по промышленному производству и переработке мяса индейки в Хабаровском крае