- Регулирование скорости вращения электроприводов с асинхронным двигателем. Лекция №6

Содержание
- 2. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Регулированием скорости называется принудительное изменение скорости электропривода в
- 3. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Регулирование угловой скорости электропривода возможно механическими и электрическими
- 4. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Электрические способы регулирования угловой скорости электропривода заключаются в
- 5. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Основными показателями характеризующими различные способы регулирования электроприводов являются:
- 6. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования.
- 7. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Плавность регулирования характеризуется числом устойчивых скоростей, получаемых в
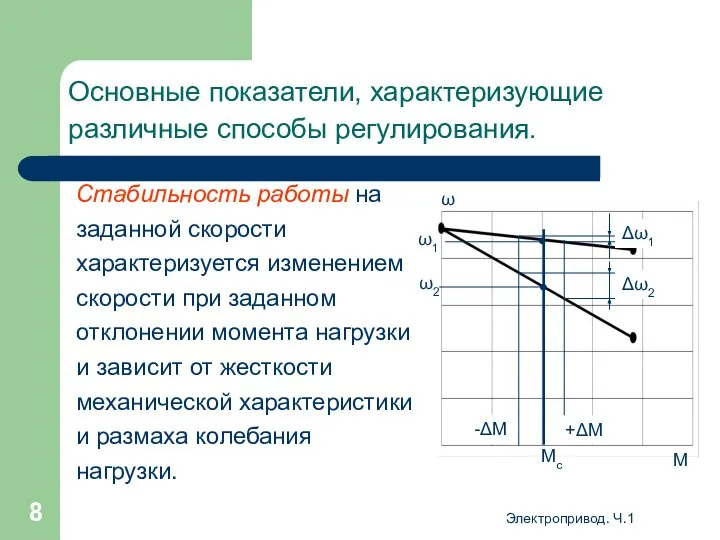
- 8. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Стабильность работы на заданной скорости характеризуется изменением скорости
- 9. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Направление регулирования скорости электропривода, то есть увеличение или
- 10. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Допустимая нагрузка двигателя также зависит от принятого способа
- 11. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. Эффективность регулирования угловой скорости численно оценивается экономическим эффектом
- 12. Электропривод. Ч.1 Основные показатели, характеризующие различные способы регулирования. В общем случае для работы регулируемого электропривода с
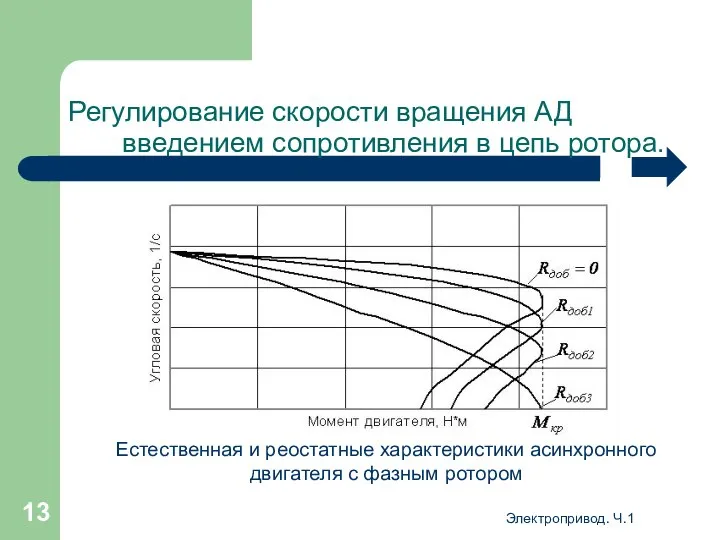
- 13. Электропривод. Ч.1 Регулирование скорости вращения АД введением сопротивления в цепь ротора.
- 14. Электропривод. Ч.1 Регулирование скорости вращения АД введением сопротивления в цепь ротора. Показатели реостатного регулирования скорости асинхронных
- 15. Электропривод. Ч.1 Регулирование скорости вращения АД введением сопротивления в цепь ротора. Регулирование ступенчатое. С энергетической точки
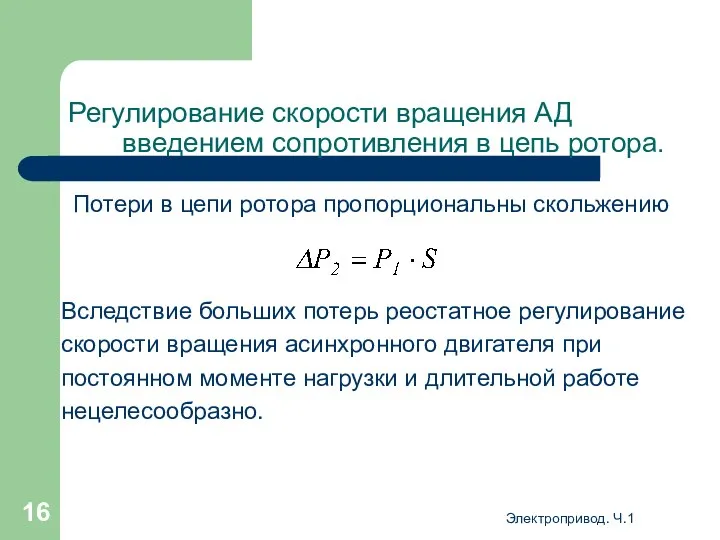
- 16. Электропривод. Ч.1 Регулирование скорости вращения АД введением сопротивления в цепь ротора. Потери в цепи ротора пропорциональны
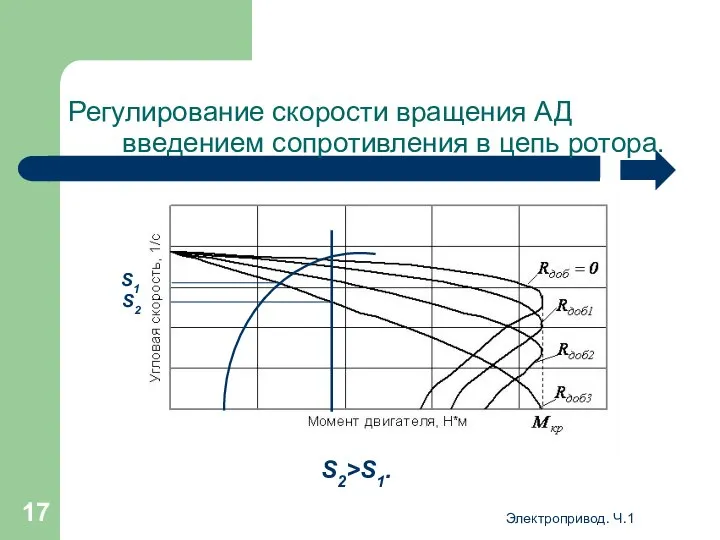
- 17. Электропривод. Ч.1 Регулирование скорости вращения АД введением сопротивления в цепь ротора. S1 S2 S2>S1.
- 18. Электропривод. Ч.1 Регулирование скорости вращения АД изменением числа полюсов. Синхронная угловая скорость асинхронного двигателя зависит от
- 19. Электропривод. Ч.1 Регулирование скорости вращения АД изменением числа полюсов.
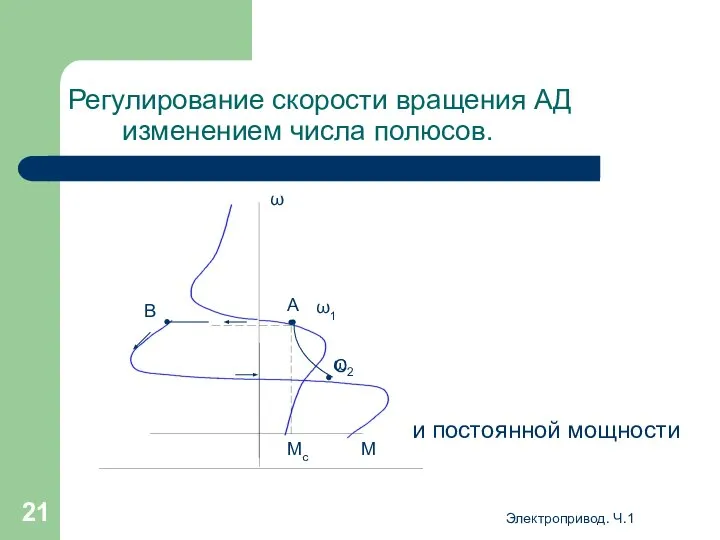
- 20. Электропривод. Ч.1 Регулирование скорости вращения АД изменением числа полюсов. Регулирование скорости асинхронного двигателя можно производить при
- 21. Электропривод. Ч.1 Регулирование скорости вращения АД изменением числа полюсов. и постоянной мощности
- 22. Электропривод. Ч.1 Регулирование скорости вращения АД изменением числа полюсов. Диапазон регулирования достигает (6:1)-(8:1). Увеличивать этот диапазон
- 23. Электропривод. Ч.1 Регулирование скорости вращения АД изменением числа полюсов. Регулирование скорости изменением числа полюсов является весьма
- 24. Электропривод. Ч.1 Регулирование скорости вращения АД изменением числа полюсов. Благодаря своим преимуществам двигатели с переключением полюсов
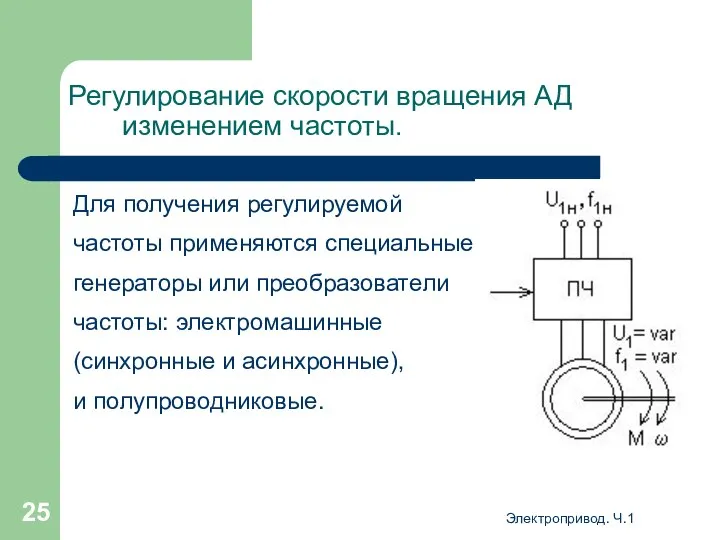
- 25. Электропривод. Ч.1 Регулирование скорости вращения АД изменением частоты. Для получения регулируемой частоты применяются специальные генераторы или
- 26. Электропривод. Ч.1 Регулирование скорости вращения АД изменением частоты. При регулировании частоты необходимо стремиться к тому. Чтобы
- 27. Электропривод. Ч.1 Регулирование скорости вращения АД изменением частоты. Для асинхронного двигателя можно приближенно принять Поэтому для
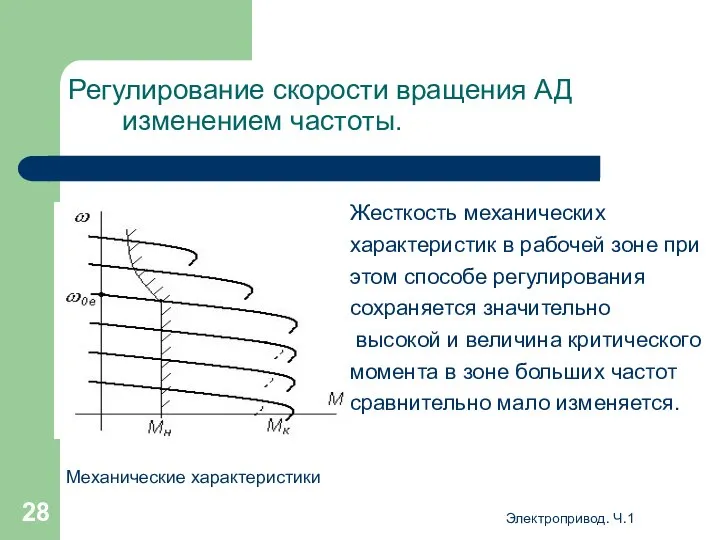
- 28. Электропривод. Ч.1 Регулирование скорости вращения АД изменением частоты. Жесткость механических характеристик в рабочей зоне при этом
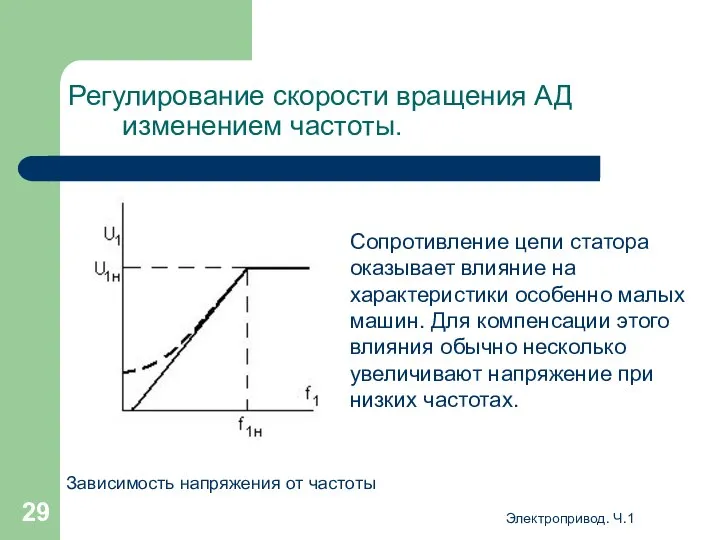
- 29. Электропривод. Ч.1 Регулирование скорости вращения АД изменением частоты. Сопротивление цепи статора оказывает влияние на характеристики особенно
- 30. Электропривод. Ч.1 Регулирование скорости вращения АД изменением частоты. Оценку частотного регулирования. Регулирование двухзонное - вниз (U1/f1≈const)
- 31. Электропривод. Ч.1 Регулирование скорости вращения АД изменением частоты. Допустимая нагрузка - М=Мн при регулировании вниз от
- 32. Электропривод. Ч.1 Регулирование скорости вращения АД изменением частоты. Способ требует использования преобразователя частоты (ПЧ) - устройства,
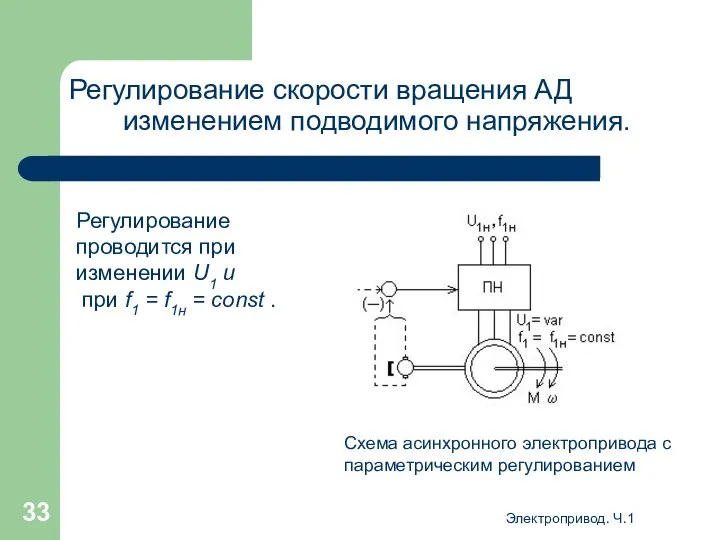
- 33. Электропривод. Ч.1 Регулирование скорости вращения АД изменением подводимого напряжения. Схема асинхронного электропривода с параметрическим регулированием Регулирование
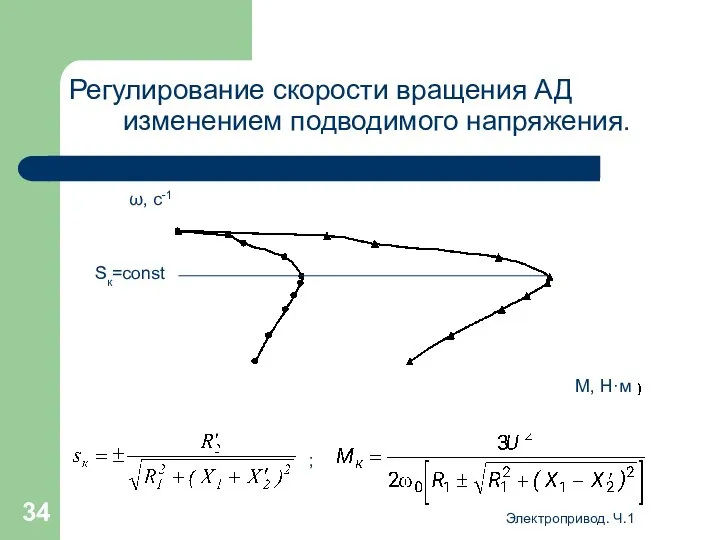
- 34. Электропривод. Ч.1 Регулирование скорости вращения АД изменением подводимого напряжения. Sк=const
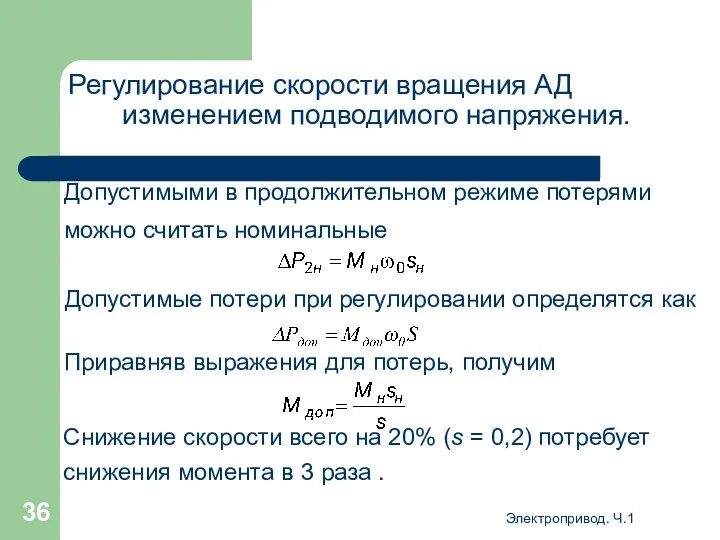
- 35. Электропривод. Ч.1 Регулирование скорости вращения АД изменением подводимого напряжения. Регулирование однозонное - вниз от основной скорости
- 36. Электропривод. Ч.1 Регулирование скорости вращения АД изменением подводимого напряжения. Допустимыми в продолжительном режиме потерями можно считать
- 38. Скачать презентацию
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Регулированием скорости называется принудительное
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Регулированием скорости называется принудительное
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Регулирование угловой скорости электропривода
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Регулирование угловой скорости электропривода
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Электрические способы регулирования угловой
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Электрические способы регулирования угловой
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Основными показателями характеризующими различные
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Основными показателями характеризующими различные
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Плавность регулирования характеризуется числом
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Плавность регулирования характеризуется числом
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Стабильность работы на заданной
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Стабильность работы на заданной
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Направление регулирования скорости электропривода,
то
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Направление регулирования скорости электропривода,
то
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Допустимая нагрузка двигателя также
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Допустимая нагрузка двигателя также
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Эффективность регулирования угловой скорости
численно
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
Эффективность регулирования угловой скорости
численно
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
В общем случае для
Электропривод. Ч.1
Основные показатели, характеризующие различные способы регулирования.
В общем случае для
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
Показатели реостатного
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
Показатели реостатного
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
Регулирование ступенчатое.
С
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
Регулирование ступенчатое.
С
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
Потери в цепи
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
Потери в цепи
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
S1
S2
S2>S1.
Электропривод. Ч.1
Регулирование скорости вращения АД
введением сопротивления в цепь ротора.
S1
S2
S2>S1.
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Синхронная угловая скорость асинхронного
двигателя
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Синхронная угловая скорость асинхронного
двигателя
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.

Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Регулирование скорости
асинхронного двигателя
можно
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Регулирование скорости
асинхронного двигателя
можно
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
и постоянной мощности
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
и постоянной мощности
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Диапазон регулирования достигает (6:1)-(8:1).
Увеличивать
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Диапазон регулирования достигает (6:1)-(8:1).
Увеличивать
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Регулирование скорости изменением числа
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Регулирование скорости изменением числа
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Благодаря своим преимуществам двигатели
с
Электропривод. Ч.1
Регулирование скорости вращения АД изменением числа полюсов.
Благодаря своим преимуществам двигатели
с
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Для получения регулируемой
частоты применяются специальные
генераторы
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Для получения регулируемой
частоты применяются специальные
генераторы
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
При регулировании частоты необходимо
стремиться к
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
При регулировании частоты необходимо
стремиться к
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Для асинхронного двигателя можно приближенно
принять
Поэтому
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Для асинхронного двигателя можно приближенно
принять
Поэтому
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Жесткость механических
характеристик в рабочей
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Жесткость механических
характеристик в рабочей
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Сопротивление цепи статора оказывает влияние
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Сопротивление цепи статора оказывает влияние

Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Оценку частотного регулирования.
Регулирование двухзонное -
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Оценку частотного регулирования.
Регулирование двухзонное -
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Допустимая нагрузка - М=Мн при
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Допустимая нагрузка - М=Мн при
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Способ требует использования преобразователя частоты
Электропривод. Ч.1
Регулирование скорости вращения АД изменением частоты.
Способ требует использования преобразователя частоты
Электропривод. Ч.1
Регулирование скорости вращения АД изменением подводимого напряжения.
Схема асинхронного электропривода с
Электропривод. Ч.1
Регулирование скорости вращения АД изменением подводимого напряжения.
Схема асинхронного электропривода с
Электропривод. Ч.1
Регулирование скорости вращения АД изменением подводимого напряжения.
Sк=const
Электропривод. Ч.1
Регулирование скорости вращения АД изменением подводимого напряжения.
Sк=const
Электропривод. Ч.1
Регулирование скорости вращения АД изменением подводимого напряжения.
Регулирование однозонное - вниз
Электропривод. Ч.1
Регулирование скорости вращения АД изменением подводимого напряжения.
Регулирование однозонное - вниз
Электропривод. Ч.1
Регулирование скорости вращения АД изменением подводимого напряжения.
Допустимыми в продолжительном режиме
Электропривод. Ч.1
Регулирование скорости вращения АД изменением подводимого напряжения.
Допустимыми в продолжительном режиме
 Реконструкция системы электроснабжения БПЖТ, и электропривода насоса жидкого топлива
Реконструкция системы электроснабжения БПЖТ, и электропривода насоса жидкого топлива Давай поговорим о чудесах. Чудо
Давай поговорим о чудесах. Чудо Методи наукових досліджень в лексикології
Методи наукових досліджень в лексикології Инновационные технологии как ресурс для развития туризма на примере Японии
Инновационные технологии как ресурс для развития туризма на примере Японии Фототчет по пр.окр.среде.РычковаО.В
Фототчет по пр.окр.среде.РычковаО.В Природа и музыка
Природа и музыка Игра - тренажёр Словарные слова
Игра - тренажёр Словарные слова Организация ЭВМ и вычислительных систем. ЛЕКЦИЯ 1. Вводная часть В1
Организация ЭВМ и вычислительных систем. ЛЕКЦИЯ 1. Вводная часть В1 Финал_1_2_1_без примечаний (1)
Финал_1_2_1_без примечаний (1) Вечнозелёные горы
Вечнозелёные горы Кто ты из Гравити Фолз?
Кто ты из Гравити Фолз? Машиностроительный комплекс
Машиностроительный комплекс Схемы электрических соединений электрических станций и подстанций
Схемы электрических соединений электрических станций и подстанций Рекомендации к родительскому собранию Не допустить беды
Рекомендации к родительскому собранию Не допустить беды 20130326_v.kaverin1.ppt
20130326_v.kaverin1.ppt Основные характеристики методики проведения полевых опытов
Основные характеристики методики проведения полевых опытов Макет слайдов на награждение ОМ
Макет слайдов на награждение ОМ Презентация. Рисуем робота
Презентация. Рисуем робота Ребусы
Ребусы Ar mums būvēt vienkārši un ērti
Ar mums būvēt vienkārši un ērti Закаливание
Закаливание Фокина Л. П. Шаблон
Фокина Л. П. Шаблон Искусство первобытного общества
Искусство первобытного общества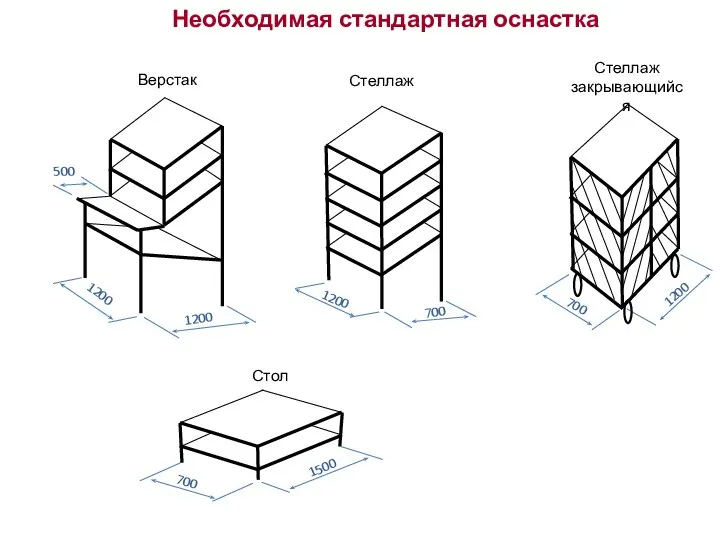 Необходимая стандартная оснастка
Необходимая стандартная оснастка Проект музея Поэты серебряного века
Проект музея Поэты серебряного века Смешарики. Война финал
Смешарики. Война финал Кислотные обработки ПЗП
Кислотные обработки ПЗП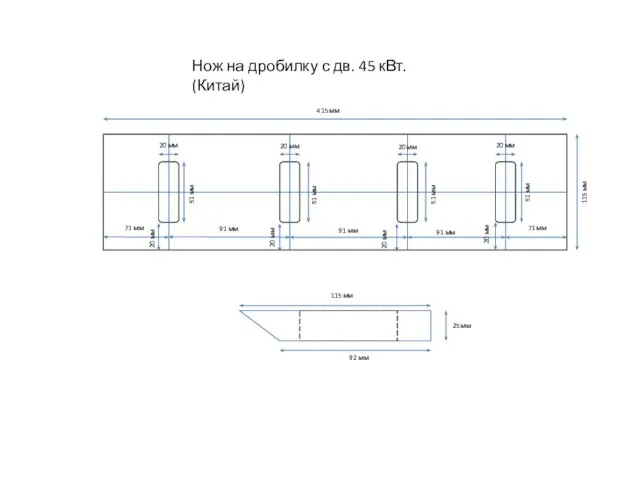 Нож на дробилку. Чертеж ножа
Нож на дробилку. Чертеж ножа