- Робот-спасатель

Содержание
- 2. «РОБОТ - СПАСАТЕЛЬ» ОПИСАНИЕ Робот имеет небольшие размеры 30х20х20 см. Вес – 1 кг. Робот собран
- 3. Змей и спаситель Змеевидный робот, разработанный российскими учеными, сможет отыскивать людей под завалами и проводить разведывательные
- 4. ОБЩЕЕ ОПИСАНИЕ ПРОЕКТА Представленный проект решает практическую задачу – изготовление «робота-спасателя». Робот осуществляет поиск людей под
- 5. Изучение вопроса – что такое «Робот-спасатель». Где и для чего такие роботы применяются, какие бывают, с
- 6. ЭТАП 1. ВЫБОР МАТЕРИАЛОВ, ОБОРУДОВАНИЯ. Робота решено собрать на базе конструктора Lego. Для решения задачи поиска
- 7. ЭТАП 2. ПРОЕКТИРУЕМ МОДЕЛЬ РОБОТА. ВЫПОЛНЯЕМ СБОРКУ МОДЕЛИ Модель робота достаточна проста. Конструкция должна предусматривать: крепление
- 8. ЭТАП 3. ВЫБОР ХОДОВОЙ ЧАСТИ. Для ходовой части было принято решение использовать 4 колеса. Передние колеса
- 9. ЭТАП 4. ВЫБИРАЕМ И ИЗУЧАЕМ ПРОГРАММУ ДЛЯ ПОСТРОЕНИЯ 3D-МОДЕЛИ КОЛЕС. ВЫПОЛНЯЕМ КОНСТРУИРОВАНИЕ МОДЕЛИ. ВЫПОЛНЯЕМ ПЕЧАТЬ ЗАДНИХ
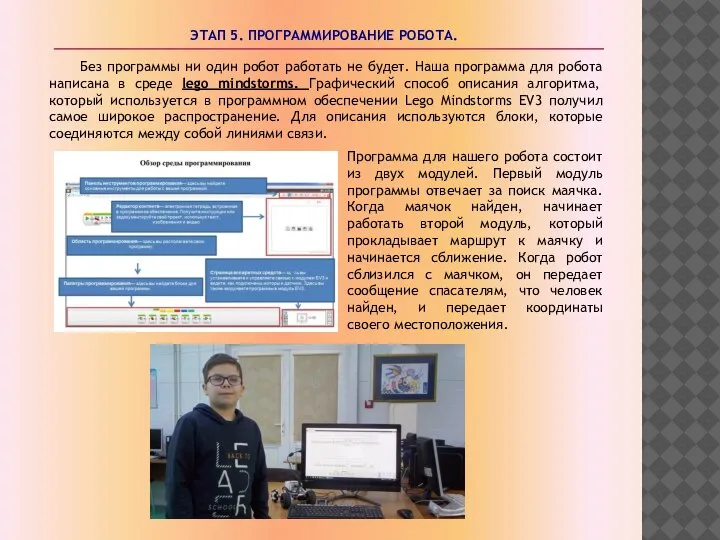
- 10. ЭТАП 5. ПРОГРАММИРОВАНИЕ РОБОТА. Без программы ни один робот работать не будет. Наша программа для робота
- 11. ЭТАП 6. УСОВЕРШЕНСТВОВАНИЕ. ДАТЧИК ЗВУКА И «МИНУТА ТИШИНЫ». ЭТАП 7. РАСЧЕТ СЕБЕСТОИМОСТИ У спасателей есть такое
- 12. ЭТАП 8. ИТОГИ. РОБОТ-СПАСАТЕЛЬ Результатом нашей работы – стал «Робот-спасатель», изготовленный с использованием самых современных Lego
- 14. Скачать презентацию
«РОБОТ - СПАСАТЕЛЬ» ОПИСАНИЕ
Робот имеет небольшие размеры 30х20х20 см. Вес –
«РОБОТ - СПАСАТЕЛЬ» ОПИСАНИЕ
Робот имеет небольшие размеры 30х20х20 см. Вес –

Змей и спаситель
Змеевидный робот, разработанный российскими учеными, сможет отыскивать людей
Змей и спаситель
Змеевидный робот, разработанный российскими учеными, сможет отыскивать людей
ОБЩЕЕ ОПИСАНИЕ ПРОЕКТА
Представленный проект решает практическую задачу – изготовление «робота-спасателя».
Робот осуществляет
ОБЩЕЕ ОПИСАНИЕ ПРОЕКТА
Представленный проект решает практическую задачу – изготовление «робота-спасателя».
Робот осуществляет

Изучение вопроса – что такое «Робот-спасатель». Где и для чего такие
Изучение вопроса – что такое «Робот-спасатель». Где и для чего такие
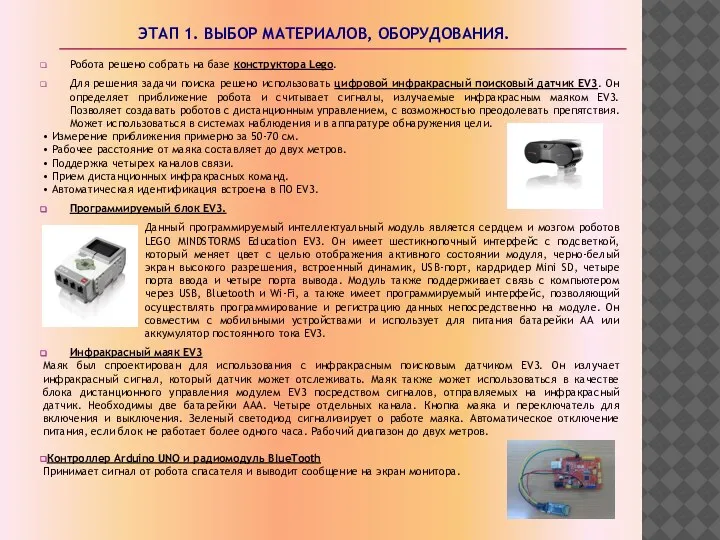
ЭТАП 1. ВЫБОР МАТЕРИАЛОВ, ОБОРУДОВАНИЯ.
Робота решено собрать на базе конструктора Lego.
Для
ЭТАП 1. ВЫБОР МАТЕРИАЛОВ, ОБОРУДОВАНИЯ.
Робота решено собрать на базе конструктора Lego.
Для

ЭТАП 2. ПРОЕКТИРУЕМ МОДЕЛЬ РОБОТА. ВЫПОЛНЯЕМ СБОРКУ МОДЕЛИ
Модель робота достаточна проста.
ЭТАП 2. ПРОЕКТИРУЕМ МОДЕЛЬ РОБОТА. ВЫПОЛНЯЕМ СБОРКУ МОДЕЛИ
Модель робота достаточна проста.

ЭТАП 3. ВЫБОР ХОДОВОЙ ЧАСТИ.
Для ходовой части было принято решение использовать
ЭТАП 3. ВЫБОР ХОДОВОЙ ЧАСТИ.
Для ходовой части было принято решение использовать
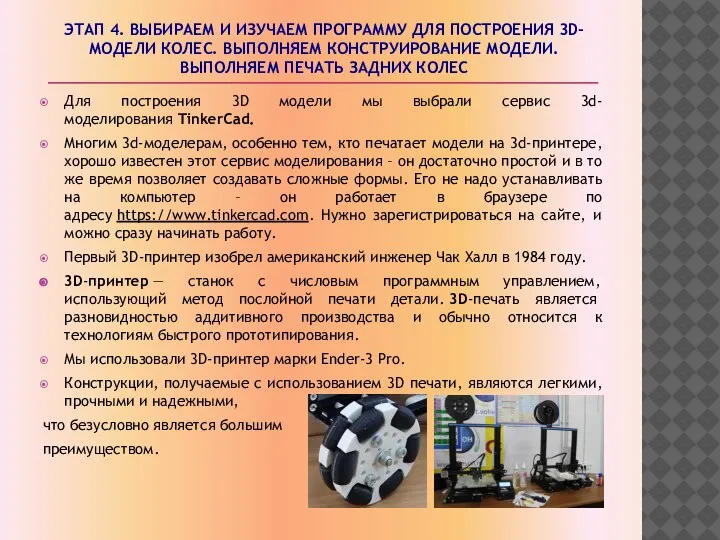
ЭТАП 4. ВЫБИРАЕМ И ИЗУЧАЕМ ПРОГРАММУ ДЛЯ ПОСТРОЕНИЯ 3D-МОДЕЛИ КОЛЕС. ВЫПОЛНЯЕМ
ЭТАП 4. ВЫБИРАЕМ И ИЗУЧАЕМ ПРОГРАММУ ДЛЯ ПОСТРОЕНИЯ 3D-МОДЕЛИ КОЛЕС. ВЫПОЛНЯЕМ
ЭТАП 5. ПРОГРАММИРОВАНИЕ РОБОТА.
Без программы ни один робот работать
ЭТАП 5. ПРОГРАММИРОВАНИЕ РОБОТА.
Без программы ни один робот работать
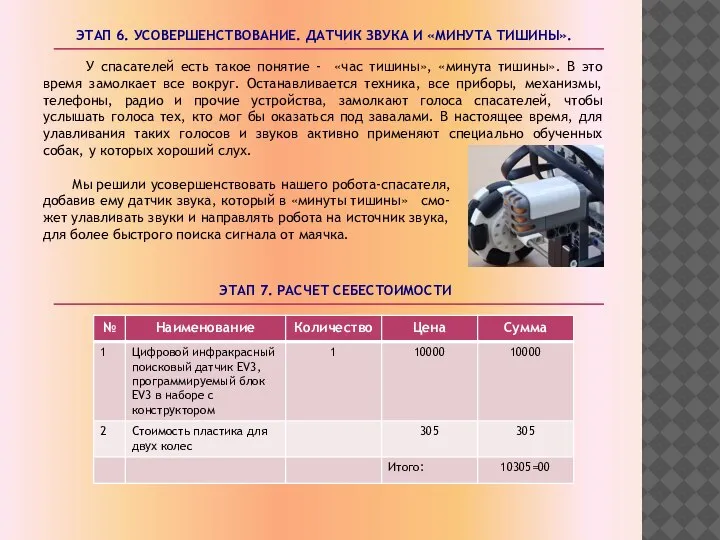
ЭТАП 6. УСОВЕРШЕНСТВОВАНИЕ. ДАТЧИК ЗВУКА И «МИНУТА ТИШИНЫ».
ЭТАП 7. РАСЧЕТ СЕБЕСТОИМОСТИ
ЭТАП 6. УСОВЕРШЕНСТВОВАНИЕ. ДАТЧИК ЗВУКА И «МИНУТА ТИШИНЫ».
ЭТАП 7. РАСЧЕТ СЕБЕСТОИМОСТИ

ЭТАП 8. ИТОГИ. РОБОТ-СПАСАТЕЛЬ
Результатом нашей работы – стал «Робот-спасатель», изготовленный с
ЭТАП 8. ИТОГИ. РОБОТ-СПАСАТЕЛЬ
Результатом нашей работы – стал «Робот-спасатель», изготовленный с
 Промышленная безопасность систем газораспределения и газопотребления
Промышленная безопасность систем газораспределения и газопотребления Виртуальная экскурсия По страницам истории
Виртуальная экскурсия По страницам истории Страстная седьмица особенности богослужения
Страстная седьмица особенности богослужения Статистические методы контроля качества продукции и услуг. Тема 1.1
Статистические методы контроля качества продукции и услуг. Тема 1.1 Средства ландшафтной архитектуры
Средства ландшафтной архитектуры Миф о бэкапах
Миф о бэкапах Повелительное наклонение
Повелительное наклонение 2 смена Дом Романовых. Наследие
2 смена Дом Романовых. Наследие КЛАСС
КЛАСС Строительство хоккейной коробки в д. Новая Казмаска
Строительство хоккейной коробки в д. Новая Казмаска 20180219_4_poema_odisseya
20180219_4_poema_odisseya англиканство(9)
англиканство(9) 20161029_pravovoy_turnir
20161029_pravovoy_turnir Курсовой проект Технология ремонта лазерного принтера HP LaserJet 1020
Курсовой проект Технология ремонта лазерного принтера HP LaserJet 1020 С юбилеем
С юбилеем 25 титульные листы разделов
25 титульные листы разделов С праздником 8 марта. Наши девочки
С праздником 8 марта. Наши девочки Basic translation theories
Basic translation theories Дед по матери - Михаил Теодорович Аллик (1879-1949)
Дед по матери - Михаил Теодорович Аллик (1879-1949) Диоды Ганна
Диоды Ганна Сальмонеллез
Сальмонеллез Я знаю, что мы делали прошлым летом
Я знаю, что мы делали прошлым летом Волшебный мир фортепиано
Волшебный мир фортепиано Швейные ручные работы. 6 класс
Швейные ручные работы. 6 класс 20150122_otechestvennaya_voyna_1812_goda
20150122_otechestvennaya_voyna_1812_goda Бухгалтерлік есеп негіздері Презентация
Бухгалтерлік есеп негіздері Презентация Анализ влияния ограничений предельных деформаций бетона при растяжении и сжатии на трещиностойкость и несущую способность ЖБК
Анализ влияния ограничений предельных деформаций бетона при растяжении и сжатии на трещиностойкость и несущую способность ЖБК Импульсные свойства транзистора
Импульсные свойства транзистора