- Специальные функции PLC. PID - регулятор

Содержание
- 3. Регулятор в системе управления
- 5. Расчёт управляющего воздействия (1)
- 6. Расчёт управляющего воздействия (2) (продолжение) ап
- 8. Пропорциональная составляющая регулятора
- 9. Интегральная составляющая регулятора
- 10. Дифференциальная составляющая регулятора
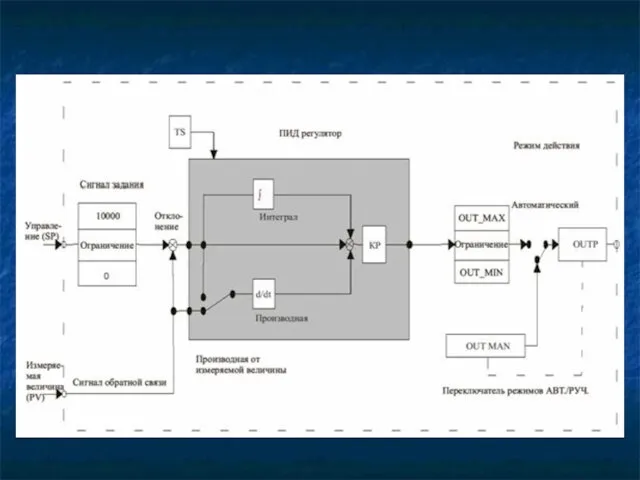
- 11. PID - регулирование
- 12. Встроенный PID-регулятор
- 13. Настройки регулятора
- 14. Настройки регулятора
- 15. Режимы управления
- 16. Прямая и обратная работа регулятора:
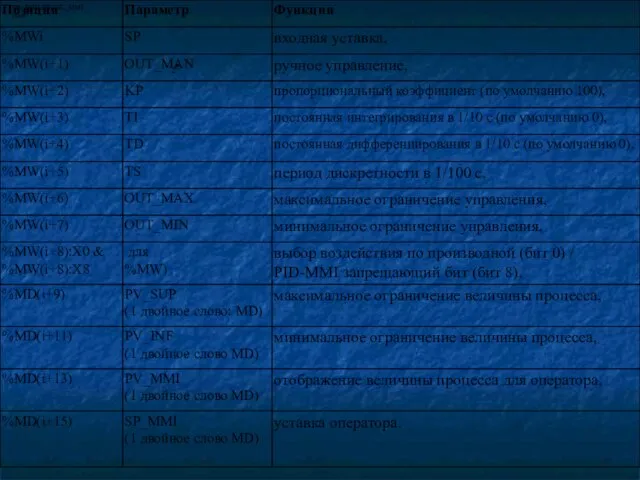
- 17. Вызов функции PID-регулятора Синтаксис вызова функции:
- 18. PV_DEV/DEVAL_MMI (бит и
- 19. Примеры вызова функции PID 1. Программирование на языке Ladder С PID(‘TEMP’, ‘DEGREES’, %MW10, %MW11, %M10, %MW20:43)
- 20. Программная реализация PID-регулятора
- 21. Расчёт управляющего воздействия для PID-регулятора • Алгоритм без интегральной составляющей (TI = 0) выполняет следующие действия:
- 22. Настройка параметров PID Существуют различные способы настройки параметров PID регулятора. Здесь описан метод Ziegler и Nichols
- 23. Настройка замкнутого контура Правило требует использования пропорционального управления (TI = 0, TD = 0) при оценке
- 24. В зависимости от типа используемого устройства управления процессом (PID или PI), настраиваемым коэффициентам присваиваются следующие значения:
- 25. Настройка разомкнутого контура
- 26. Переключите регулятор в ручной режим, задайте приращение на выход и анализируйте начальную реакцию процесса, для того
- 27. В результате такого типа настройки также получается высоко динамичное устройство управление, которое может выйти за граничные
- 28. Влияние параметров PID на процесс
- 29. Влияние пропорционального воздействия на реакцию процесса при ступенчатом управлении
- 30. Влияние интегрального воздействия на реакцию процесса при ступенчатом управлении
- 31. Влияние воздействия по производной на реакцию процесса при ступенчатом управлении
- 32. Ограничения PID регулятора Если процесс представляется моделью с передаточной функцией со звеном чистого запаздывания: где:•τ =
- 33. PID управление дает хорошие результаты при выполнении следующих условий: Для τ/ θ. Для τ/ θ >
- 35. Скачать презентацию
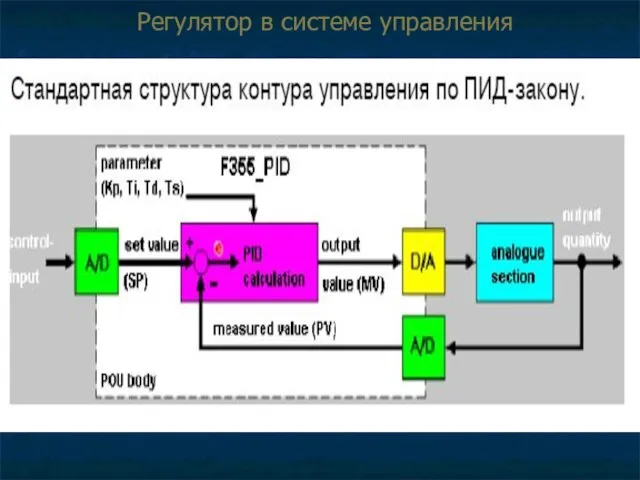
Регулятор в системе управления
Регулятор в системе управления

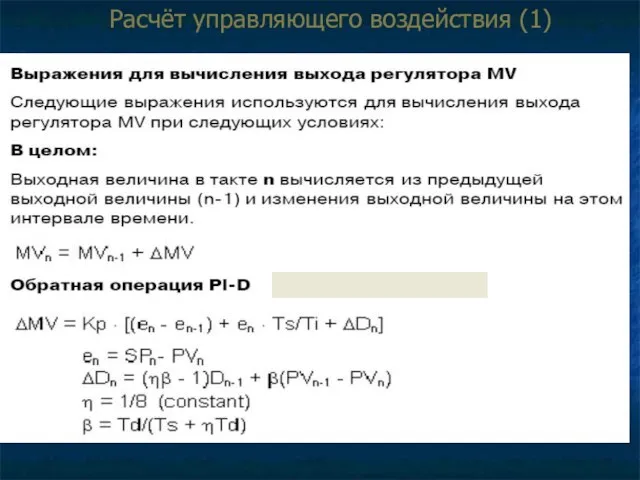
Расчёт управляющего воздействия (1)
Расчёт управляющего воздействия (1)
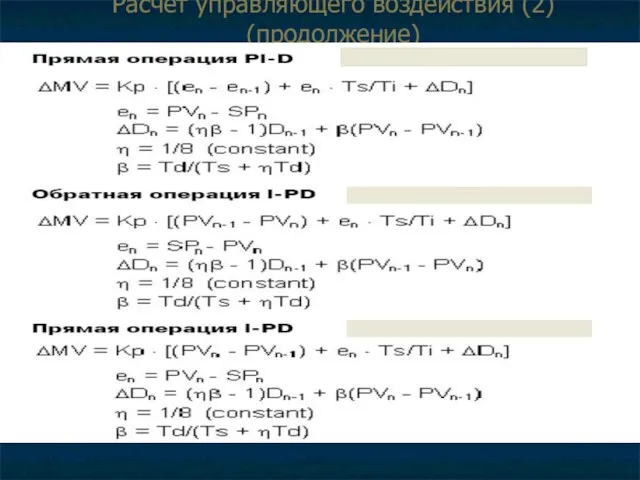
Расчёт управляющего воздействия (2) (продолжение)
ап
Расчёт управляющего воздействия (2) (продолжение)
ап
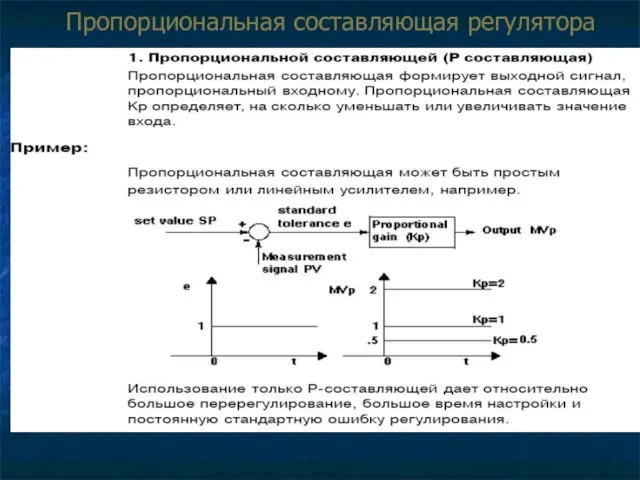
Пропорциональная составляющая регулятора
Пропорциональная составляющая регулятора
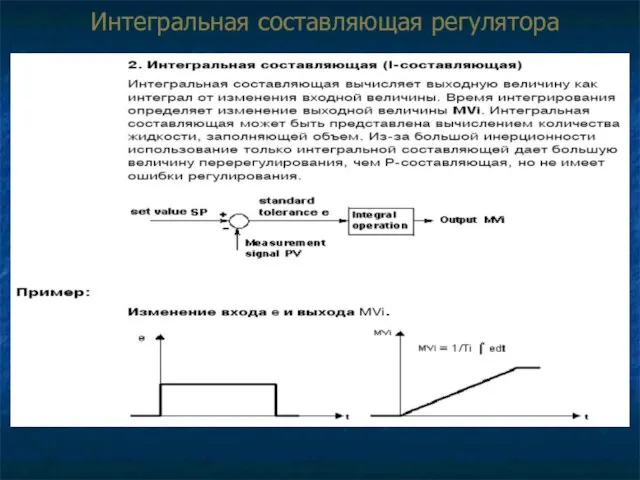
Интегральная составляющая регулятора
Интегральная составляющая регулятора
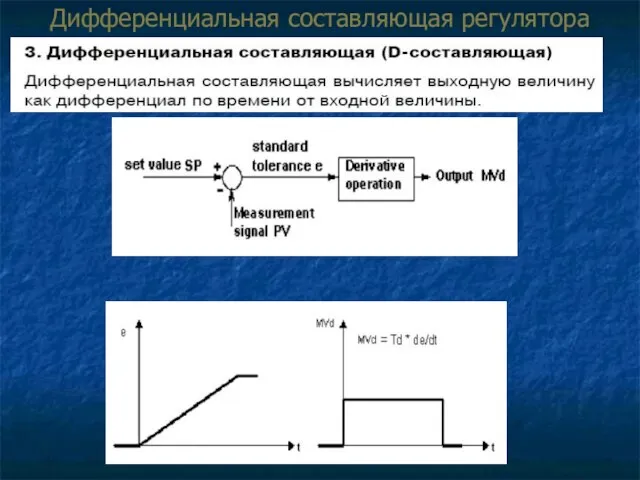
Дифференциальная составляющая регулятора
Дифференциальная составляющая регулятора
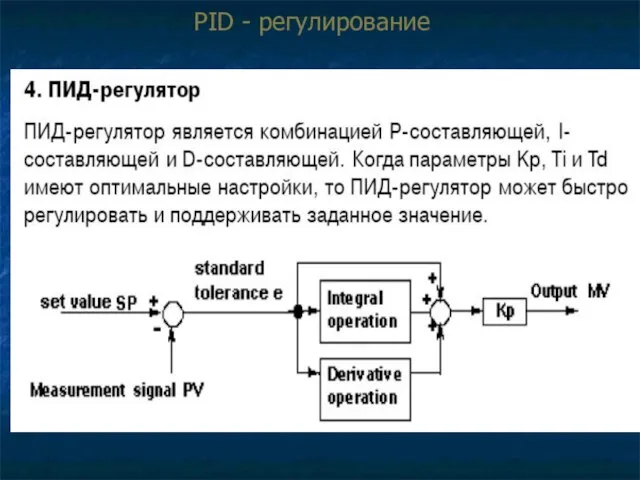
PID - регулирование
PID - регулирование
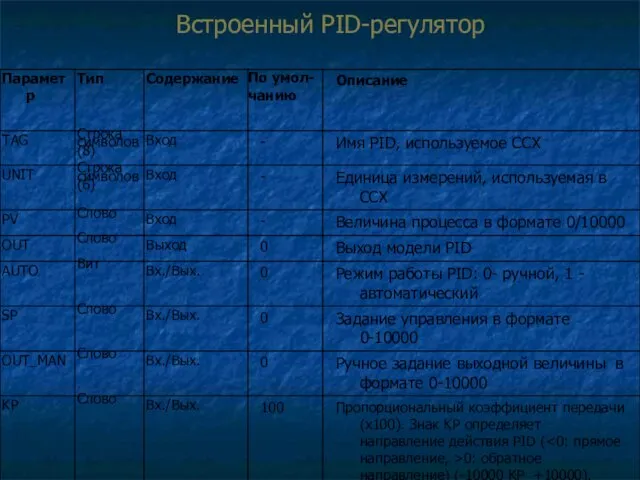
Встроенный PID-регулятор
Встроенный PID-регулятор
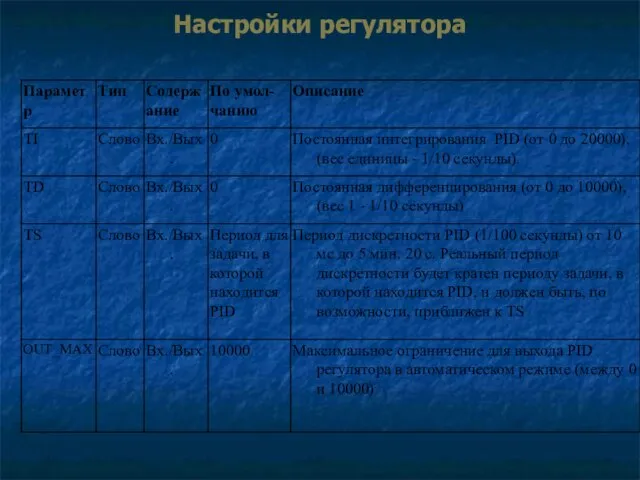
Настройки регулятора
Настройки регулятора
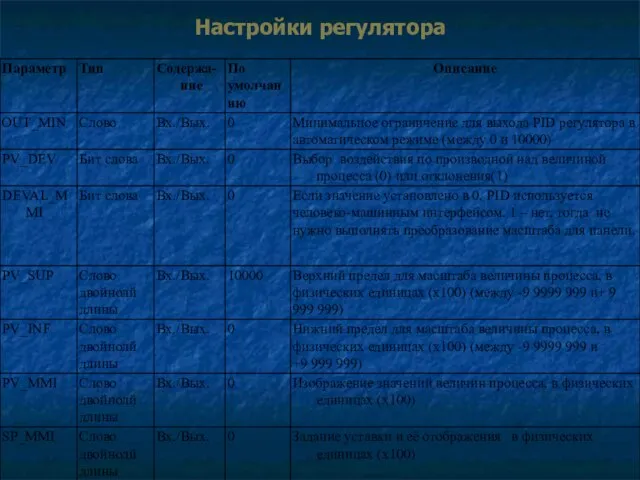
Настройки регулятора
Настройки регулятора
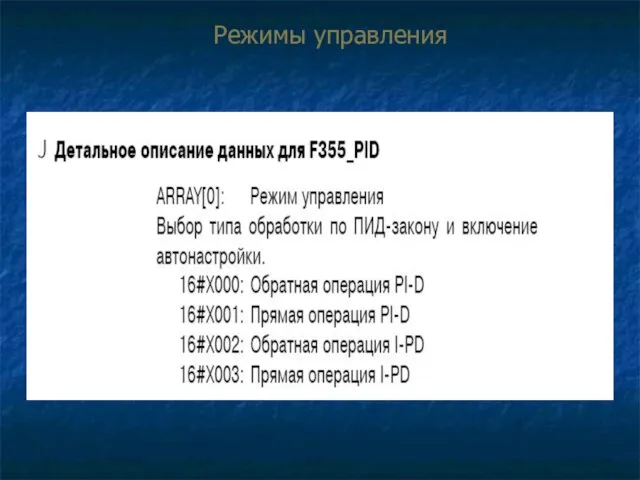
Режимы управления
Режимы управления
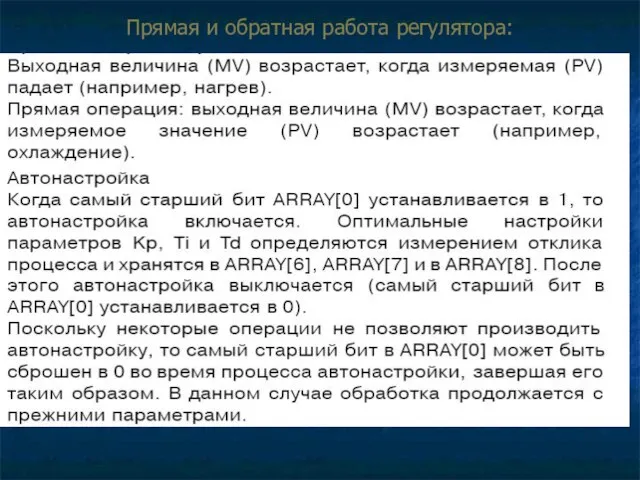
Прямая и обратная работа регулятора:
Прямая и обратная работа регулятора:
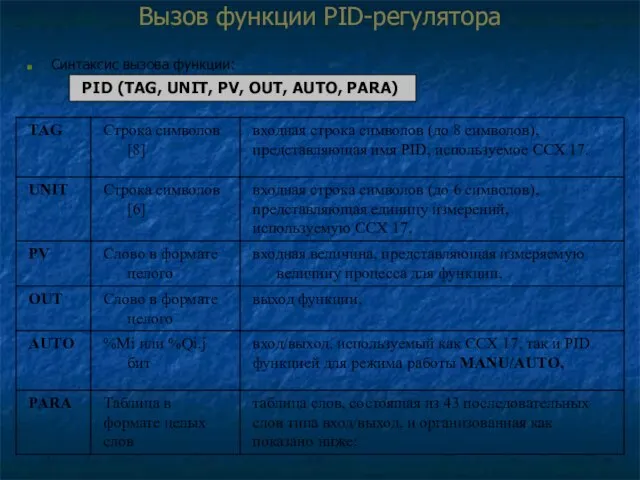
Вызов функции PID-регулятора
Синтаксис вызова функции:
Вызов функции PID-регулятора
Синтаксис вызова функции:
PV_DEV/DEVAL_MMI
(бит
и
PV_DEV/DEVAL_MMI
(бит
и
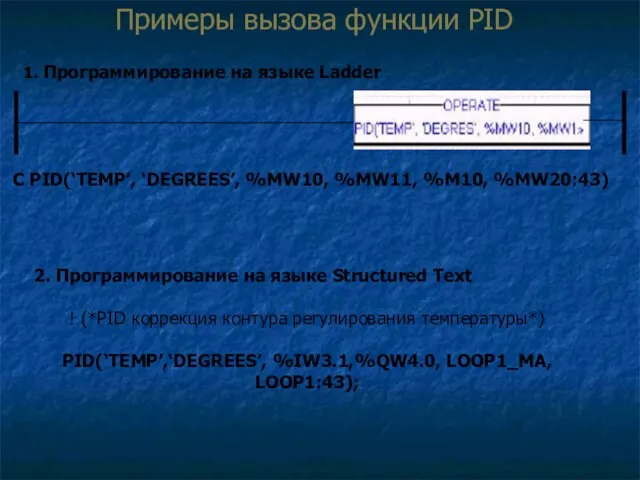
Примеры вызова функции PID
1. Программирование на языке Ladder
С PID(‘TEMP’, ‘DEGREES’,
Примеры вызова функции PID
1. Программирование на языке Ladder
С PID(‘TEMP’, ‘DEGREES’,
Программная реализация PID-регулятора
Программная реализация PID-регулятора
Расчёт управляющего воздействия для PID-регулятора
• Алгоритм без интегральной составляющей (TI =
Расчёт управляющего воздействия для PID-регулятора
• Алгоритм без интегральной составляющей (TI =
Настройка параметров PID
Существуют различные способы настройки параметров PID регулятора. Здесь описан
Настройка параметров PID
Существуют различные способы настройки параметров PID регулятора. Здесь описан
Настройка замкнутого контура
Правило требует использования пропорционального управления (TI = 0, TD
Настройка замкнутого контура
Правило требует использования пропорционального управления (TI = 0, TD
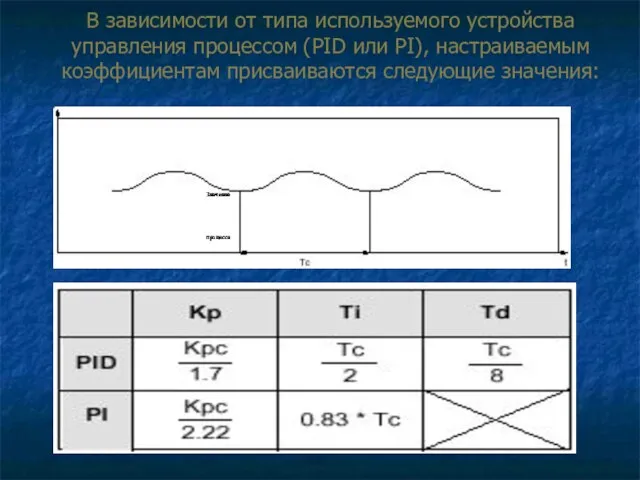
В зависимости от типа используемого устройства управления процессом (PID или PI),
В зависимости от типа используемого устройства управления процессом (PID или PI),
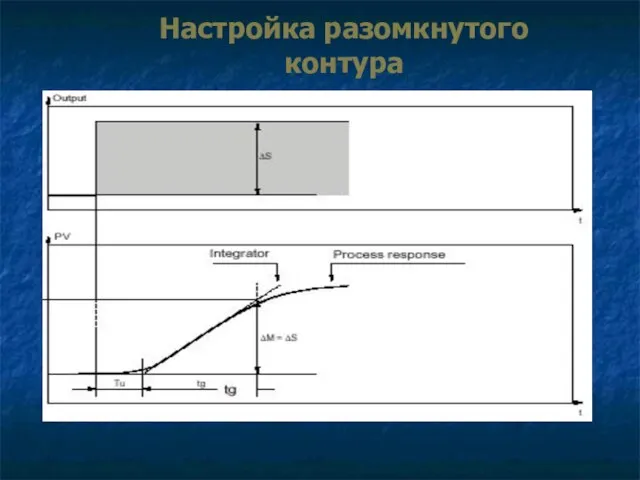
Настройка разомкнутого контура
Настройка разомкнутого контура
Переключите регулятор в ручной режим, задайте приращение на выход и анализируйте
Переключите регулятор в ручной режим, задайте приращение на выход и анализируйте
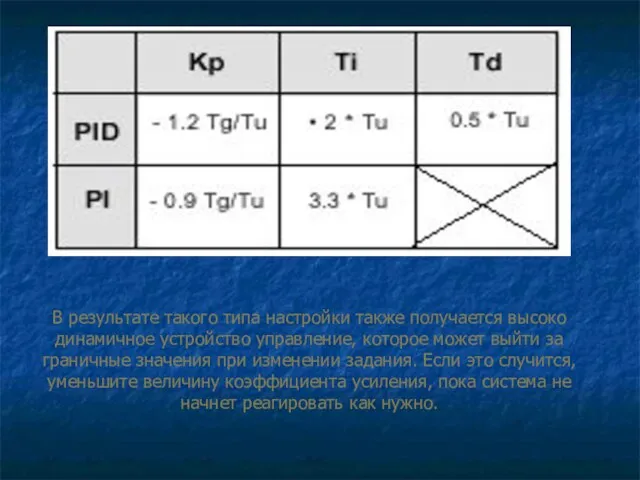
В результате такого типа настройки также получается высоко динамичное устройство управление,
В результате такого типа настройки также получается высоко динамичное устройство управление,
Влияние параметров PID на процесс
Влияние параметров PID на процесс
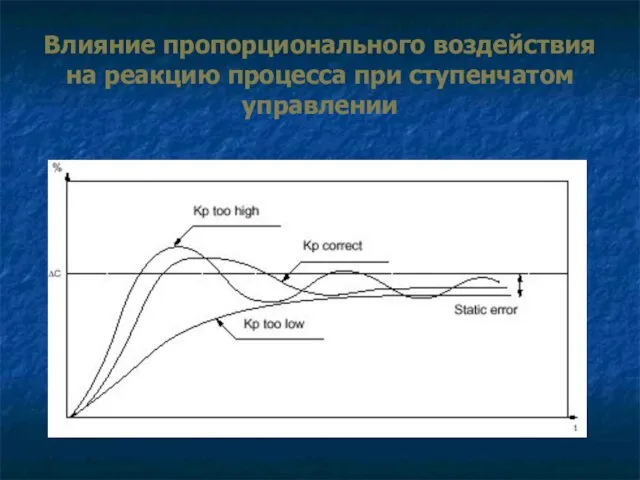
Влияние пропорционального воздействия на реакцию процесса при ступенчатом управлении
Влияние пропорционального воздействия на реакцию процесса при ступенчатом управлении
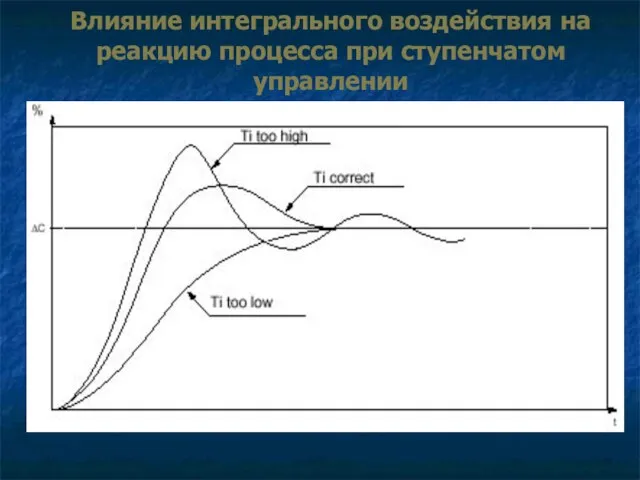
Влияние интегрального воздействия на реакцию процесса при ступенчатом управлении
Влияние интегрального воздействия на реакцию процесса при ступенчатом управлении
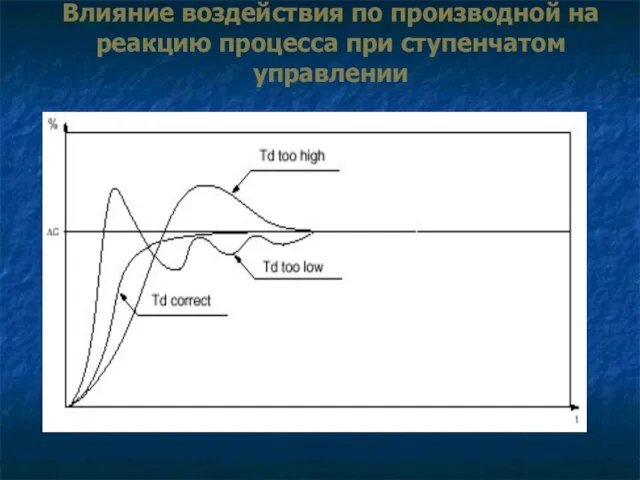
Влияние воздействия по производной на реакцию процесса при ступенчатом управлении
Влияние воздействия по производной на реакцию процесса при ступенчатом управлении
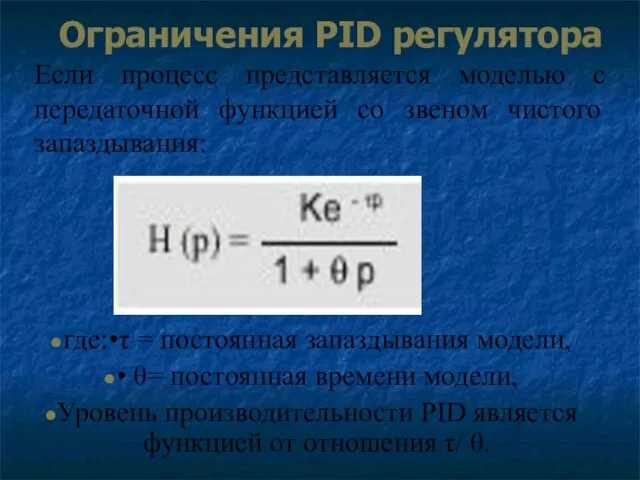
Ограничения PID регулятора
Если процесс представляется моделью с передаточной функцией со звеном
Ограничения PID регулятора
Если процесс представляется моделью с передаточной функцией со звеном
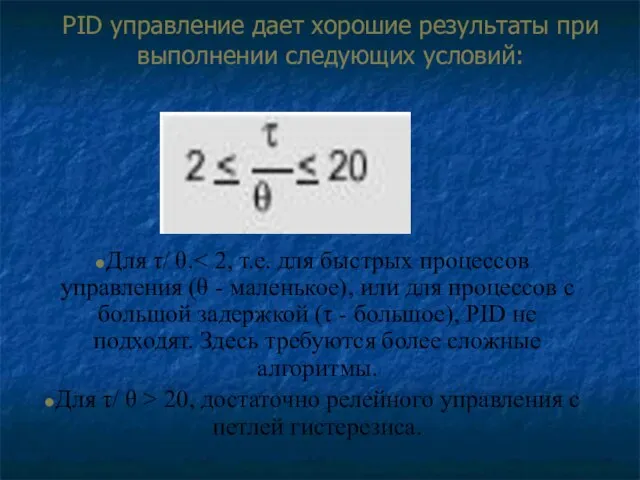
PID управление дает хорошие результаты при выполнении следующих условий:
Для τ/ θ.<
PID управление дает хорошие результаты при выполнении следующих условий:
Для τ/ θ.<
Похожие презентации
 Лекция 15. Системный подход
Лекция 15. Системный подход Мастер-класс Изготовление карандашницы-Ботинок из фоамирана
Мастер-класс Изготовление карандашницы-Ботинок из фоамирана Достопримечательности Великобритании
Достопримечательности Великобритании Помоги приюту Хати
Помоги приюту Хати Эльфийские языки
Эльфийские языки Обсуждение результатов рецензирования заключений экспертов
Обсуждение результатов рецензирования заключений экспертов Рыцарский турнир (викторина)
Рыцарский турнир (викторина) Повещение и эвакуация при пожаре. Средства тушения пожаров
Повещение и эвакуация при пожаре. Средства тушения пожаров Каталог ТМ Доми
Каталог ТМ Доми Звонков. Настоящий человек
Звонков. Настоящий человек Показатели работы ПВЗ за май 2022
Показатели работы ПВЗ за май 2022 everyday-activities-flashcards_123699
everyday-activities-flashcards_123699 Полупроводниковые диоды. Лекция 2
Полупроводниковые диоды. Лекция 2
 20171012_pyotr_pervyy
20171012_pyotr_pervyy найди соседей
найди соседей Просечной металл
Просечной металл Prezentatsia_varenaya_kolbasa
Prezentatsia_varenaya_kolbasa Чтобы помнили
Чтобы помнили Своя игра. Английские традиции
Своя игра. Английские традиции Module 1a (с. 10) Картинка для беседы по тексту
Module 1a (с. 10) Картинка для беседы по тексту терроризм
терроризм Технология обработки грузовых поездов
Технология обработки грузовых поездов Презентация МБ практика иммунитет
Презентация МБ практика иммунитет Текстильные материалы животного происхождения
Текстильные материалы животного происхождения Запрошуємо на службу в поліції на вакантні посади до підрозділів головного управління національної поліції у вашій області
Запрошуємо на службу в поліції на вакантні посади до підрозділів головного управління національної поліції у вашій області География научно-образовательных и социальных услуг
География научно-образовательных и социальных услуг 20160420_globalnoe_poteplenie
20160420_globalnoe_poteplenie