- Transparent interaction and human-robot collaboration for military operations

Содержание
- 2. THEY GO WHERE SOLDIERS CANNOT THEY KEEP BOTH SOLDIERS AND CIVILIANS SAFE WHY ROBOTS ARE IMPORTANT
- 3. ROBOTICS PROGRESS TIMELINE Past Future Nowadays Autonomous teammates Teleoperated tools HRI PROGRESS TIMELINE Human and robot
- 4. HR BEHAVIORS Work related activities needed to accomplish the team’s goals TASKWORK Coordination, sharing knowledge, and
- 5. METHODS OF HRI AUTONOMOUS SYSTEMS a system that can use its understanding of the world, itself,
- 6. Effective teamwork between humans and robots, like effective teamwork between people, depends on a mutual understanding
- 7. THE LOOP – WHAT IS IT AND WHY WE WANT TO BE IN IT so long
- 8. COMMUNICATION BETWEEN HUMANS AND ROBOTS ROBOT’S GESTURES Animal-like or human-like gestures This increased independence can make
- 9. The RoboNurse can be exploited in dangerous environments, harmful to the ordinary nurse (COVID-19 hospitals, battlefields,
- 11. Скачать презентацию

THEY GO WHERE SOLDIERS CANNOT
THEY KEEP BOTH SOLDIERS AND CIVILIANS SAFE
WHY
THEY GO WHERE SOLDIERS CANNOT
THEY KEEP BOTH SOLDIERS AND CIVILIANS SAFE
WHY

ROBOTICS PROGRESS
TIMELINE
Past
Future
Nowadays
Autonomous teammates
Teleoperated tools
HRI PROGRESS
TIMELINE
Human and robot share the task load
Human
ROBOTICS PROGRESS
TIMELINE
Past
Future
Nowadays
Autonomous teammates
Teleoperated tools
HRI PROGRESS
TIMELINE
Human and robot share the task load
Human

HR BEHAVIORS
Work related activities needed to accomplish the team’s goals
TASKWORK
Coordination, sharing
HR BEHAVIORS
Work related activities needed to accomplish the team’s goals
TASKWORK
Coordination, sharing

METHODS OF HRI
AUTONOMOUS SYSTEMS
a system that can use its understanding of
METHODS OF HRI
AUTONOMOUS SYSTEMS
a system that can use its understanding of

Effective teamwork between humans and robots, like effective teamwork between people,
Effective teamwork between humans and robots, like effective teamwork between people,

THE LOOP – WHAT IS IT AND WHY WE WANT TO
THE LOOP – WHAT IS IT AND WHY WE WANT TO

COMMUNICATION BETWEEN HUMANS AND ROBOTS
ROBOT’S GESTURES
Animal-like or human-like gestures
This increased independence
COMMUNICATION BETWEEN HUMANS AND ROBOTS
ROBOT’S GESTURES
Animal-like or human-like gestures
This increased independence
The RoboNurse can be exploited in dangerous environments, harmful to the
The RoboNurse can be exploited in dangerous environments, harmful to the
 Овощата ВК
Овощата ВК Операции с данными
Операции с данными 20140328_metod_polucheniya_informatsii_-_tablitsy
20140328_metod_polucheniya_informatsii_-_tablitsy Фотоальбом
Фотоальбом Разработка линии производства консервов Мясо тушёное
Разработка линии производства консервов Мясо тушёное Domashnee_zadanie_po_geometrii_k_13_sentyabrya
Domashnee_zadanie_po_geometrii_k_13_sentyabrya Вовлечение молодежи в развитие городов и регионов евраза
Вовлечение молодежи в развитие городов и регионов евраза 20131124_istoriya_russkoy_literatury
20131124_istoriya_russkoy_literatury История холодильника
История холодильника Ти знаеш що ти людина?
Ти знаеш що ти людина? Искусственный интеллект / робототехника
Искусственный интеллект / робототехника Тест. Строгальные инструменты
Тест. Строгальные инструменты Моя сім’я
Моя сім’я Фотоальбом. Посвящение мамам
Фотоальбом. Посвящение мамам 20131219_2._nivkhskie_skazki
20131219_2._nivkhskie_skazki Управление персоналом. Введение в профессию
Управление персоналом. Введение в профессию Здравствуй, Осень!
Здравствуй, Осень! Сучасний період в теології
Сучасний період в теології Оценка и исследование ресурса асинхронного электродвигателя в зависимости от планируемых условий эксплуатации
Оценка и исследование ресурса асинхронного электродвигателя в зависимости от планируемых условий эксплуатации презентация Космическое путешествие к аппликации
презентация Космическое путешествие к аппликации Масштабирование сетей VLAN
Масштабирование сетей VLAN 20141108_ispolzovanie_ikt_v_obshcheobrazovatelnom_protsesse_2
20141108_ispolzovanie_ikt_v_obshcheobrazovatelnom_protsesse_2 ПАЎТАРЭННЕ. гукі оэа еёя
ПАЎТАРЭННЕ. гукі оэа еёя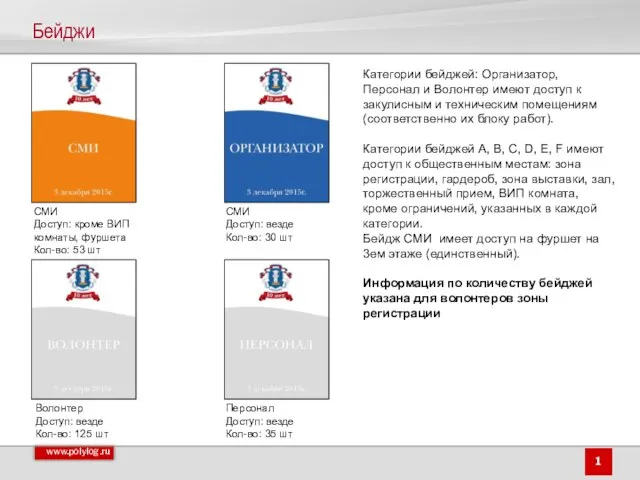 Бейджи и система доступа
Бейджи и система доступа Антоненко. Что внутри него?
Антоненко. Что внутри него? Урок №7 Слово як частина мови
Урок №7 Слово як частина мови 20161101_prezentatsiya_kvn_6_klass
20161101_prezentatsiya_kvn_6_klass Любимой и дорогой подруге Поле
Любимой и дорогой подруге Поле