Устрій та бойове застосування КЗА 86Ж6. Методика розрахунку змінних величин. Розрахунок змінних величин. (Тема 11.2)
- Устрій та бойове застосування КЗА 86Ж6. Методика розрахунку змінних величин. Розрахунок змінних величин. (Тема 11.2)

Содержание
- 2. Устрій та бойове застосування КЗА 86Ж6 Тема №11 : Методика розрахунку змінних величин Заняття № 2
- 3. Навчальні питання 1. Підготовка технічних та програмних засобів 2. Розрахунок змінних величин 3. Порядок розрахунку змінних
- 4. Схема розрахунку та записи змінних величин
- 5. 1. Підготовка технічних та програмних засобів 1.1. перевірити працездатность СВ по повному складу тестів 1.2. підготувати
- 6. Тестова директива розрахунку Ш / 11111/ 31 12 1982// ТАБЛИЦА 01/ 1 06376700 06410071 0100/ 2
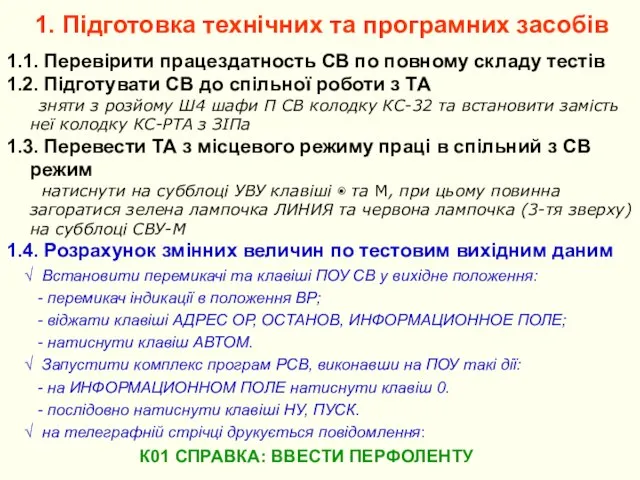
- 7. 1. Підготовка технічних та програмних засобів 1.1. Перевірити працездатность СВ по повному складу тестів 1.2. Підготувати
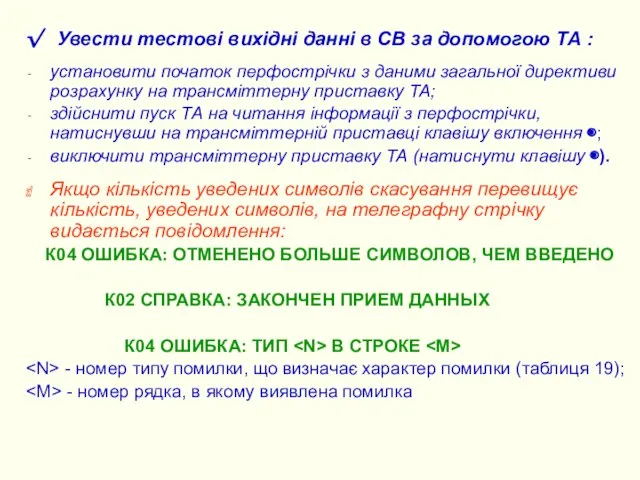
- 8. √ Увести тестові вихідні данні в СВ за допомогою ТА : установити початок перфострічки з даними
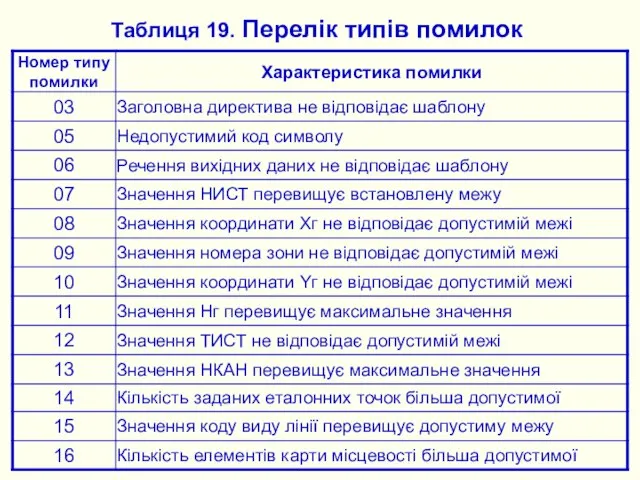
- 9. Таблиця 19. Перелік типів помилок
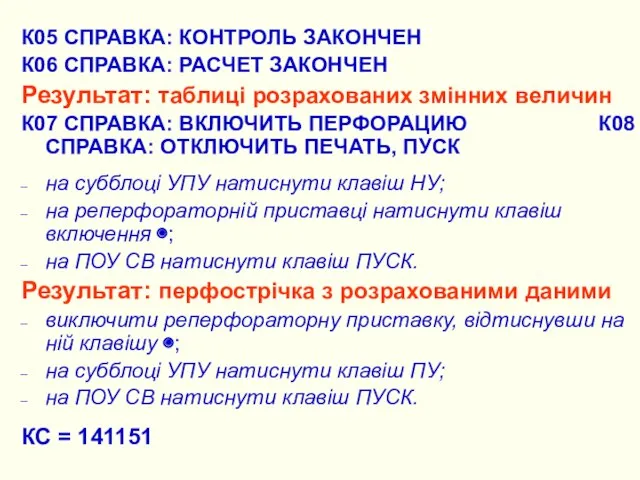
- 10. К05 СПРАВКА: КОНТРОЛЬ ЗАКОНЧЕН К06 СПРАВКА: РАСЧЕТ ЗАКОНЧЕН Результат: таблиці розрахованих змінних величин К07 СПРАВКА: ВКЛЮЧИТЬ
- 11. Результатом розрахунку змінних величин є: - таблиці змінних величин; - перфострічка з кодами змінних величин.
- 12. 2. Розрахунок змінних величин Результатом розрахунку змінних величин є: - контрольна сума КС = - таблиці
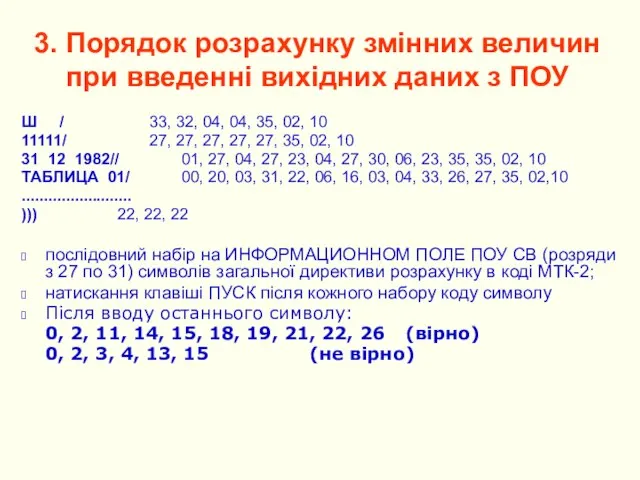
- 13. 3. Порядок розрахунку змінних величин при введенні вихідних даних з ПОУ Ш / 11111/ 31 12
- 15. 3. Порядок розрахунку змінних величин при введенні вихідних даних з ПОУ Ш / 33, 32, 04,
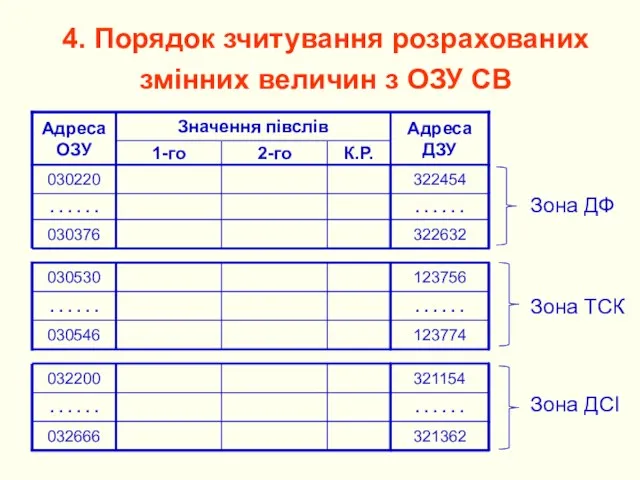
- 16. 4. Порядок зчитування розрахованих змінних величин з ОЗУ СВ
- 17. 5. Розрахунок змінних величин вручну або за допомогою ПЕОМ X А2 R2 XБi+1 А1 R1 ЄТ
- 18. 5. Розрахунок змінних величин вручну або за допомогою ПЕОМ Необхідно перерахувати: дислокаційні змінні величини еталонні точки
- 19. Вихідні дані для дислокаційних змінних величин: координати головного та підлеглих джерел для еталонних точок координати еталонних
- 20. Результати розрахунків для дислокаційних змінних величин: базові координати та направляючі косинуси підлеглих джерел і 5Д91 для
- 21. Перерахунок координат Хг, Yг в координати В та L де: αх ‑ коефіцієнт, рад; Хг ‑
- 22. L=L1+l де: L – довгота в геодезичній системі координат, рад; L1 ‑ довгота в геодезичній системі
- 23. Розрахунок направляючих косинусів: k11=cosB0 ∙ cosBi + sinB0 ∙ sinBi∙cos(Li – L0); k12=sinB0 ∙ sin(Li –
- 24. Розрахунок базових координат віддалених РЛС, еталонних точок та елементів карти місцевості ХБ=k13 ∙ (Ni + Ні)
- 26. Скачать презентацию
Устрій та бойове застосування КЗА 86Ж6
Тема №11 : Методика розрахунку
Устрій та бойове застосування КЗА 86Ж6
Тема №11 : Методика розрахунку
Навчальні питання
1. Підготовка технічних та програмних засобів
2. Розрахунок змінних
Навчальні питання
1. Підготовка технічних та програмних засобів
2. Розрахунок змінних

Схема розрахунку та записи змінних величин
Схема розрахунку та записи змінних величин
1. Підготовка технічних та програмних засобів
1.1. перевірити працездатность СВ по
1. Підготовка технічних та програмних засобів
1.1. перевірити працездатность СВ по
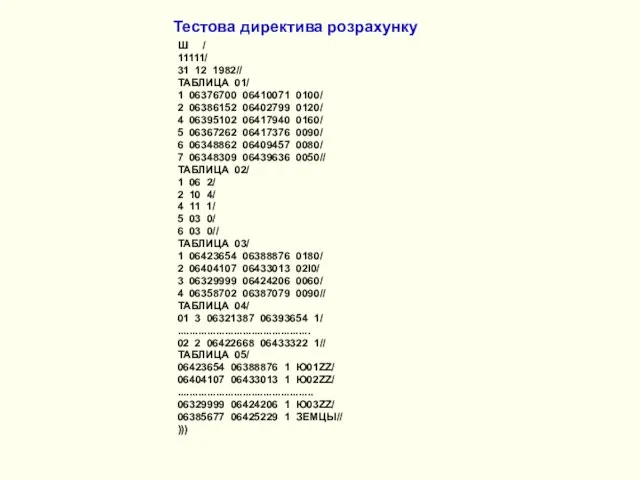
Тестова директива розрахунку
Ш /
11111/
31 12 1982//
ТАБЛИЦА 01/
1 06376700 06410071 0100/
2
Тестова директива розрахунку
Ш /
11111/
31 12 1982//
ТАБЛИЦА 01/
1 06376700 06410071 0100/
2
1. Підготовка технічних та програмних засобів
1.1. Перевірити працездатность СВ по
1. Підготовка технічних та програмних засобів
1.1. Перевірити працездатность СВ по
√ Увести тестові вихідні данні в СВ за допомогою ТА :
√ Увести тестові вихідні данні в СВ за допомогою ТА :
Таблиця 19. Перелік типів помилок
Таблиця 19. Перелік типів помилок
К05 СПРАВКА: КОНТРОЛЬ ЗАКОНЧЕН
К06 СПРАВКА: РАСЧЕТ ЗАКОНЧЕН
Результат: таблиці розрахованих змінних величин
К05 СПРАВКА: КОНТРОЛЬ ЗАКОНЧЕН
К06 СПРАВКА: РАСЧЕТ ЗАКОНЧЕН
Результат: таблиці розрахованих змінних величин
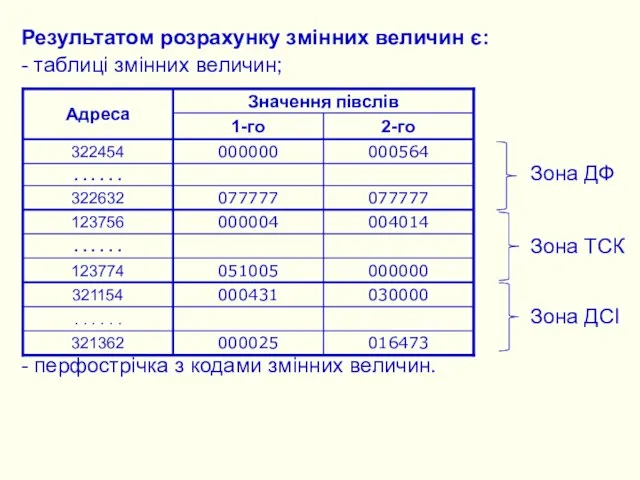
Результатом розрахунку змінних величин є:
- таблиці змінних величин;
- перфострічка з кодами
Результатом розрахунку змінних величин є:
- таблиці змінних величин;
- перфострічка з кодами
2. Розрахунок змінних величин
Результатом розрахунку змінних величин є:
- контрольна сума
КС
2. Розрахунок змінних величин
Результатом розрахунку змінних величин є:
- контрольна сума
КС
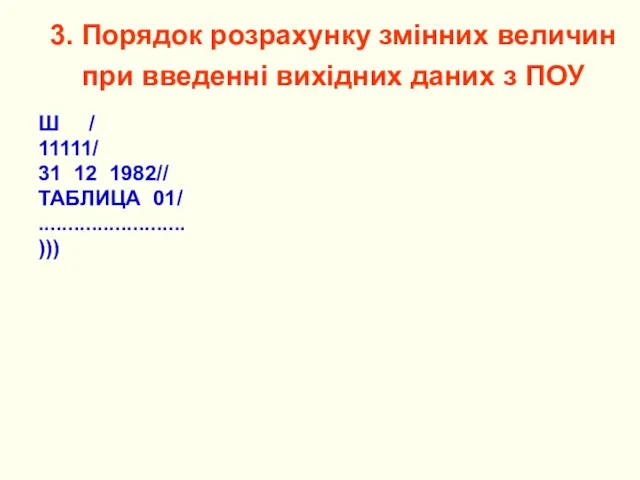
3. Порядок розрахунку змінних величин при введенні вихідних даних з ПОУ
3. Порядок розрахунку змінних величин при введенні вихідних даних з ПОУ
3. Порядок розрахунку змінних величин при введенні вихідних даних з ПОУ
Ш
3. Порядок розрахунку змінних величин при введенні вихідних даних з ПОУ
Ш
4. Порядок зчитування розрахованих змінних величин з ОЗУ СВ
4. Порядок зчитування розрахованих змінних величин з ОЗУ СВ

5. Розрахунок змінних величин вручну або за допомогою ПЕОМ
X
5. Розрахунок змінних величин вручну або за допомогою ПЕОМ
X
5. Розрахунок змінних величин вручну або за допомогою ПЕОМ
Необхідно перерахувати:
дислокаційні змінні
5. Розрахунок змінних величин вручну або за допомогою ПЕОМ
Необхідно перерахувати:
дислокаційні змінні
Вихідні дані
для дислокаційних змінних величин:
координати головного та підлеглих джерел
для еталонних
Вихідні дані
для дислокаційних змінних величин:
координати головного та підлеглих джерел
для еталонних
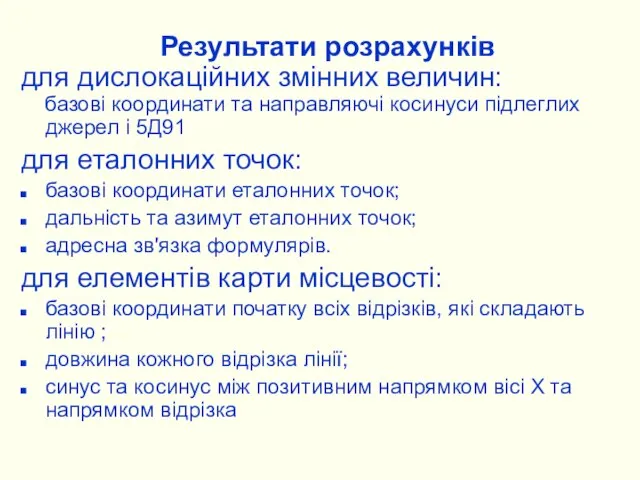
Результати розрахунків
для дислокаційних змінних величин:
базові координати та направляючі косинуси
Результати розрахунків
для дислокаційних змінних величин:
базові координати та направляючі косинуси
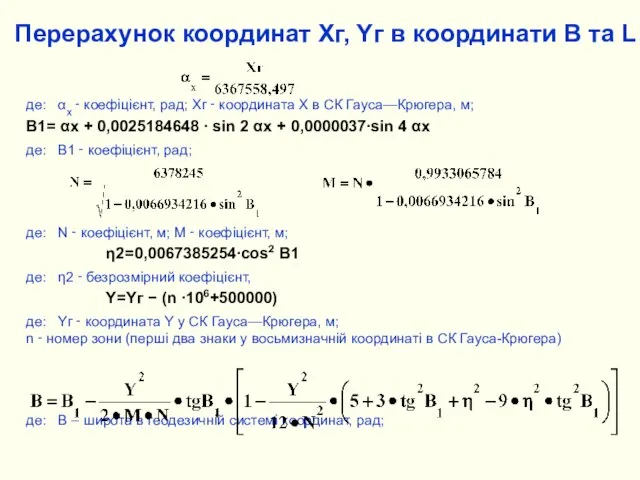
Перерахунок координат Хг, Yг в координати В та L
де: αх
Перерахунок координат Хг, Yг в координати В та L
де: αх
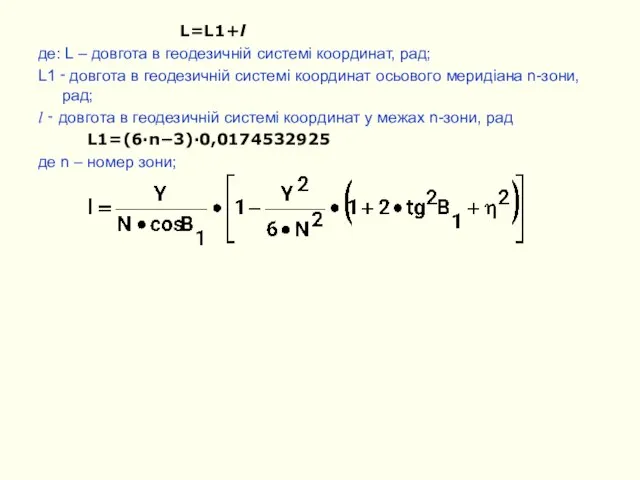
L=L1+l
де: L – довгота в геодезичній системі координат, рад;
L1 ‑
L=L1+l
де: L – довгота в геодезичній системі координат, рад;
L1 ‑
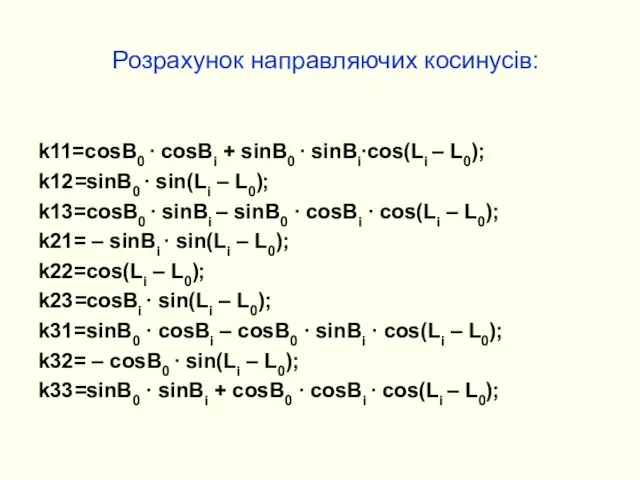
Розрахунок направляючих косинусів:
k11=cosB0 ∙ cosBi + sinB0 ∙ sinBi∙cos(Li – L0);
k12=sinB0
Розрахунок направляючих косинусів:
k11=cosB0 ∙ cosBi + sinB0 ∙ sinBi∙cos(Li – L0);
k12=sinB0
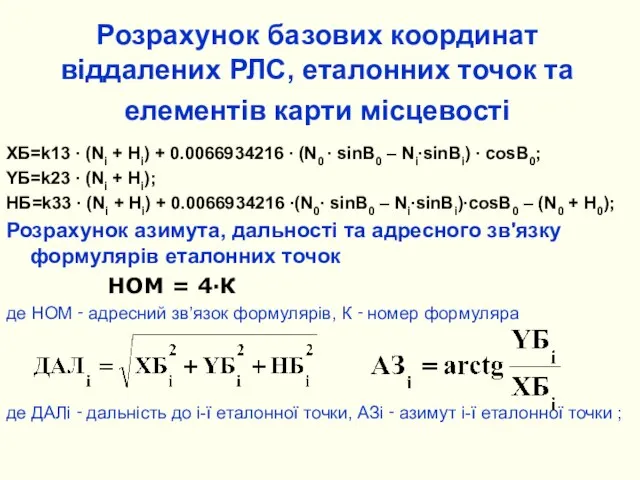
Розрахунок базових координат віддалених РЛС, еталонних точок та елементів карти місцевості
Розрахунок базових координат віддалених РЛС, еталонних точок та елементів карти місцевості
 Творческая работа Аквариум
Творческая работа Аквариум Поделки из помпончиков
Поделки из помпончиков Авиастроительное предприятие
Авиастроительное предприятие Airbus and Boeing
Airbus and Boeing География транспорта. Мировая транспортная система
География транспорта. Мировая транспортная система Афиша. Праздничная программа Мужской разговор
Афиша. Праздничная программа Мужской разговор Общие сведения о системе СППЗ-85. Источники входных сигналов СППЗ-85
Общие сведения о системе СППЗ-85. Источники входных сигналов СППЗ-85 Системно-деятельностный подход концептуальная основа ФГОС общего образования
Системно-деятельностный подход концептуальная основа ФГОС общего образования Наушники. Составные части каркаса наушников
Наушники. Составные части каркаса наушников Наука. Библиотека. Музеи
Наука. Библиотека. Музеи Творческая работа Время первых
Творческая работа Время первых Презентация
Презентация Презентация 27 08 2022
Презентация 27 08 2022 Методы и средства регулирования напряжения и частоты в электрических сетях
Методы и средства регулирования напряжения и частоты в электрических сетях Текст-рассуждение. Повторение пройденного
Текст-рассуждение. Повторение пройденного Крым - наш край родной
Крым - наш край родной Оборудование и методы применяемые при технологии вскрытия зон поглощений в процессе бурения
Оборудование и методы применяемые при технологии вскрытия зон поглощений в процессе бурения Реализация идей ФГОС начального общего образования. Педагогическая практика духовно- нравственного развития и воспитания
Реализация идей ФГОС начального общего образования. Педагогическая практика духовно- нравственного развития и воспитания Расчёт выпуска по канализации
Расчёт выпуска по канализации 20131204_a.s.pushkin.tsygany
20131204_a.s.pushkin.tsygany Друзья
Друзья Электроннай технологическай каарталар
Электроннай технологическай каарталар Мировые религии
Мировые религии Орг тур походов
Орг тур походов Ветреная молодость. Нургисаева Айжана
Ветреная молодость. Нургисаева Айжана Фото-деф
Фото-деф Занимательная физика
Занимательная физика Реактивные, турбореактивные и ракетные двигатели. (Тема 6)
Реактивные, турбореактивные и ракетные двигатели. (Тема 6)