- Введение, общие сведения. Определение понятия электропривод

Содержание
- 2. Электропривод – это управляемая электромеханическая система. Её назначение – преобразовывать электрическую энергию в механическую и обратно
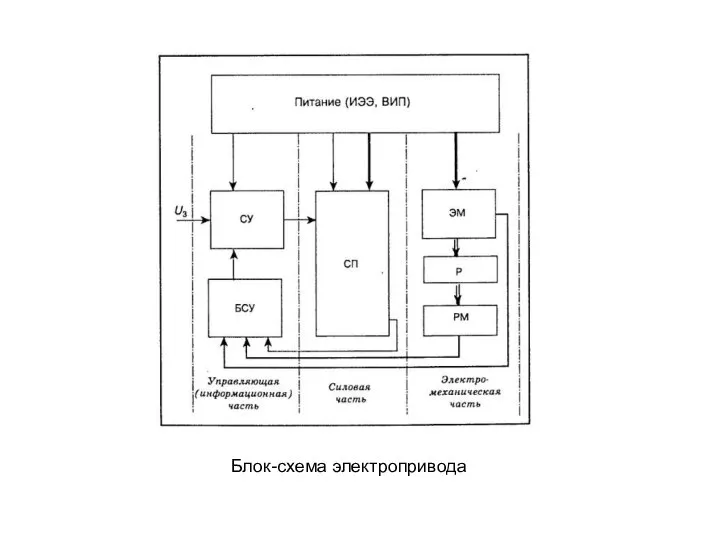
- 3. Блок-схема электропривода
- 4. Электропривод (см.рисунок – это электромеханическая система, состоящая из электрической машины (ЭМ), связанной посредством механической передачи (редуктор
- 5. В качестве СП рассматриваются силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование электрических параметров источника электрической энергии
- 6. Электропривод имеет два канала – силовой и информационный (см. следующий рисунок ). По первому транспортируется преобразуемая
- 7. Общая структура электропривода
- 8. Силовой канал в свою очередь состоит из двух частей – электрической и механической и обязательно содержит
- 9. Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного органа установки, в котором
- 10. 1.2. Функции электропривода Рассмотрим подробнее силовой (энергетический) канал электропривода (см. след. рис.). Будем полагать, что мощность
- 11. Энергетический канал электропривода
- 12. Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической энергии, поставляемой источником (сетью) и
- 13. Электромеханический преобразователь ЭМП (двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U, I) в механическую (М,
- 14. Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном изменении в соответствии с
- 15. В правильно организованной системе при управлении координатами (потоком энергии) должны минимизироваться потери Р во всех элементах
- 16. Даже беглого взгляда на структуру силовой части электропривода (см. предыдущий рис.) достаточно, чтобы понять, что объект
- 17. Во-первых, надо научиться работать с моделями реальных, как правило, очень сложных объектов, т.е. с искусственными простыми
- 18. 1.3. Механические характеристики производственных механизмов и электродвигателей Различают механическую характеристику электродвигателя и механическую характеристику устройства, которому
- 19. Механические характеристики производственных механизмов. 1) Момент сопротивления производственного механизма не зависит от частоты вращения. Это по
- 20. Рисунок
- 21. 2) Линейно-возрастающая характеристика
- 22. Рисунок
- 23. 3) Параболическая механическая характеристика
- 24. Рисунок
- 25. 4) Гиперболический вид характеристики.
- 26. Рисунок
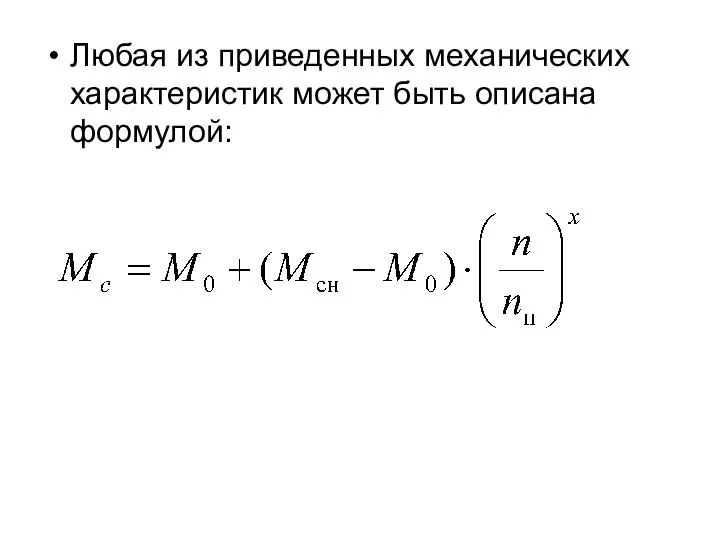
- 27. Любая из приведенных механических характеристик может быть описана формулой:
- 28. где М0 – механический момент трогания производственного механизма, Мсн – номинальный момент сопротивления производственного механизма, n
- 29. Механические характеристики электрических двигателей. Все механические характеристики электрических двигателей бывают жесткие и мягкие. Абсолютно жесткой называется
- 31. Скачать презентацию
Электропривод – это управляемая электромеханическая система. Её назначение – преобразовывать электрическую
Электропривод – это управляемая электромеханическая система. Её назначение – преобразовывать электрическую
Блок-схема электропривода
Блок-схема электропривода
Электропривод (см.рисунок – это электромеханическая система, состоящая из электрической машины (ЭМ),
Электропривод (см.рисунок – это электромеханическая система, состоящая из электрической машины (ЭМ),
В качестве СП рассматриваются силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование
В качестве СП рассматриваются силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование
Электропривод имеет два канала – силовой и информационный (см. следующий рисунок
Электропривод имеет два канала – силовой и информационный (см. следующий рисунок
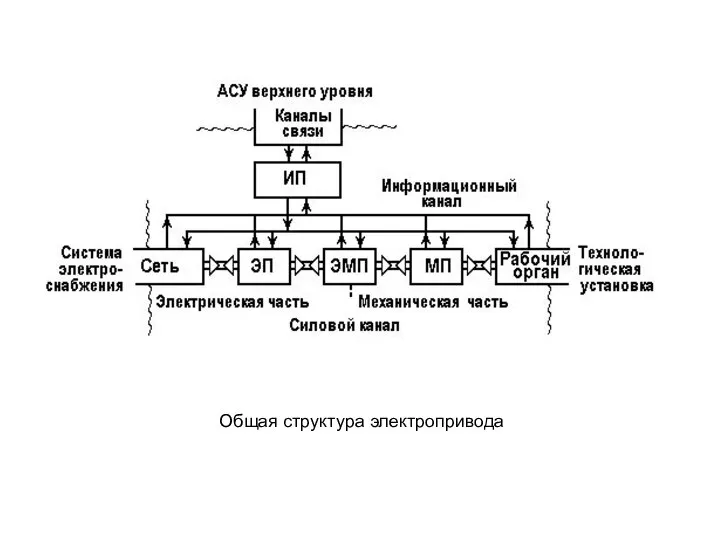
Общая структура электропривода
Общая структура электропривода
Силовой канал в свою очередь состоит из двух частей – электрической
Силовой канал в свою очередь состоит из двух частей – электрической
Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и
Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и
1.2. Функции электропривода
Рассмотрим подробнее силовой (энергетический) канал электропривода (см. след.
1.2. Функции электропривода
Рассмотрим подробнее силовой (энергетический) канал электропривода (см. след.
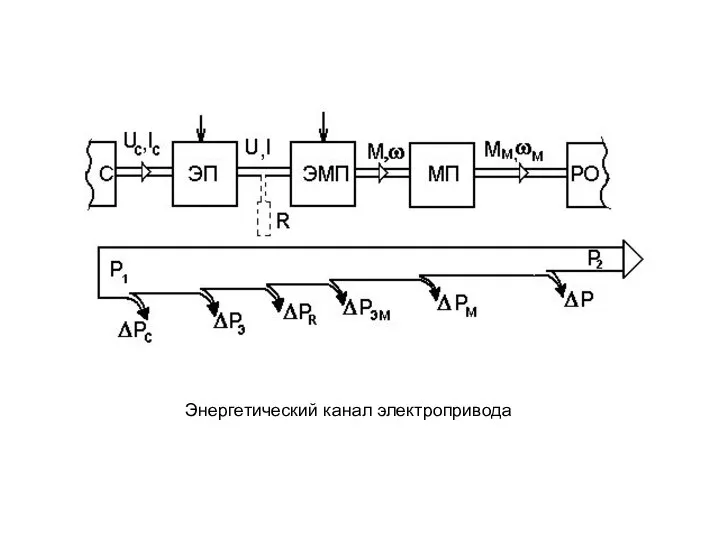
Энергетический канал электропривода
Энергетический канал электропривода
Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической
Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической
Электромеханический преобразователь ЭМП (двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию
Электромеханический преобразователь ЭМП (двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию
Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном
Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном
В правильно организованной системе при управлении координатами (потоком энергии) должны минимизироваться
В правильно организованной системе при управлении координатами (потоком энергии) должны минимизироваться
Даже беглого взгляда на структуру силовой части электропривода (см. предыдущий рис.)
Даже беглого взгляда на структуру силовой части электропривода (см. предыдущий рис.)
Во-первых, надо научиться работать с моделями реальных, как правило, очень сложных
Во-первых, надо научиться работать с моделями реальных, как правило, очень сложных
1.3. Механические характеристики производственных механизмов и электродвигателей
Различают механическую характеристику электродвигателя
1.3. Механические характеристики производственных механизмов и электродвигателей
Различают механическую характеристику электродвигателя
Механические характеристики производственных механизмов.
1) Момент сопротивления производственного механизма не зависит от
Механические характеристики производственных механизмов.
1) Момент сопротивления производственного механизма не зависит от
Рисунок
Рисунок
2) Линейно-возрастающая характеристика
2) Линейно-возрастающая характеристика
Рисунок
Рисунок
3) Параболическая механическая характеристика
3) Параболическая механическая характеристика
Рисунок
Рисунок
4) Гиперболический вид характеристики.
4) Гиперболический вид характеристики.
Рисунок
Рисунок
Любая из приведенных механических характеристик может быть описана формулой:
Любая из приведенных механических характеристик может быть описана формулой:
где М0 – механический момент трогания производственного механизма,
Мсн – номинальный момент
где М0 – механический момент трогания производственного механизма,
Мсн – номинальный момент
Механические характеристики электрических двигателей.
Все механические характеристики электрических двигателей бывают жесткие и
Механические характеристики электрических двигателей.
Все механические характеристики электрических двигателей бывают жесткие и
 Винайдення автобуса
Винайдення автобуса Основные положения технологии возведения зданий и сооружений
Основные положения технологии возведения зданий и сооружений Цитологическое исследование эндоскопического материала методом Папаниколау
Цитологическое исследование эндоскопического материала методом Папаниколау Материнская плата
Материнская плата С праздником!
С праздником! Презентация август 2022
Презентация август 2022 20180118_5_urok_literatura
20180118_5_urok_literatura Основы технической эксплуатации и обслуживания электрического и электромеханического оборудования
Основы технической эксплуатации и обслуживания электрического и электромеханического оборудования Метрологія, технологічні вимірювання та прилади в нафтогазовій промисловості
Метрологія, технологічні вимірювання та прилади в нафтогазовій промисловості Проектирование осушительных сетей
Проектирование осушительных сетей Наши выпускники!
Наши выпускники! Выбор профессии. Сложно ли это?
Выбор профессии. Сложно ли это? Основные сведения о системах электроснабжения объектов
Основные сведения о системах электроснабжения объектов Автоматизация теплоэнергетических процессов
Автоматизация теплоэнергетических процессов Положения по расчету строительных конструкций. (Лекция 3)
Положения по расчету строительных конструкций. (Лекция 3) Буддизм. Буддистские монахи
Буддизм. Буддистские монахи 20121019_netradicionnye_formy
20121019_netradicionnye_formy Деаэратор: назначение, устройство, принцип действия
Деаэратор: назначение, устройство, принцип действия Моделирование фартука
Моделирование фартука Lecture_No_5_Solid_waste_biotreatment_Ethanol_production_from_LCM_Part_II
Lecture_No_5_Solid_waste_biotreatment_Ethanol_production_from_LCM_Part_II Времена года. Зима
Времена года. Зима Дефекты при сварке давлением. (Лекция 24)
Дефекты при сварке давлением. (Лекция 24) Забайкальская
Забайкальская Презентация1
Презентация1 Закономерности распределения напряжений в грунте фазы деформаций грунта под фундаментом
Закономерности распределения напряжений в грунте фазы деформаций грунта под фундаментом музыкальная память
музыкальная память Marktwirtschaft
Marktwirtschaft биопсия почек
биопсия почек