- Введение в Lego Mindstorms NXT

Содержание
- 2. Блок Lego Mindstorms NXT К нему подключаются двигатели (порты A, B, C) и датчики (1, 2,
- 3. Двигатель (Motor) Соединяется с блоком NXT в порты A, B или C Можно регулировать: мощность вращения
- 4. Датчик нажатия (Touch sensor) Осязание робота Позволяет “нащупывать” путь (определять, есть ли перед ним препятствие) Может
- 5. Ультразвуковой датчик (Ultrasonic sensor) Работает по принципу локатора летучей мыши. Определяет расстояние до препятствия (от 0
- 6. Робот с ультразвуковым датчиком Робот может объезжать препятствия и двигать предметы
- 7. Датчик звука (Sound sensor) Определяет громкость звука Позволяет роботу “слышать” Помогает примерно определить направление на звук
- 8. Датчик света (Color Sensor) Позволяет роботу различать цвета и отличать свет от темноты Определяет уровень освещенности
- 9. Роботы с датчиком света Рука-манипулятор, определяющая цвет взятого шарика Робот, едущий по линии
- 10. Совместное использование датчиков Робот находит шары, пользуясь ультразвуковым датчиком и определяет их цвет, используя датчик цвета
- 11. Кабели Используются для соединения двигателей и датчиков с блоком NXT Три типа кабелей: 20 см, 35
- 12. Детали робота Балки Штифты Оси Шестеренки Колеса Прочие
- 13. Балки Основные компоненты корпуса робота Делятся на прямые и изогнутые (1 или 2 раза) Меряются по
- 14. Штифты Используются для соединения балок между собой и с другими деталями Бывают: двухмодульные трехмодульные крестообразные
- 15. Оси Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес Длина оси меряется в модулях:
- 16. Шестеренки Используются для передачи вращения с двигателя на колеса робота, а также для изменения мощности и
- 18. Скачать презентацию

Блок Lego Mindstorms NXT
К нему подключаются двигатели (порты A, B, C)
Блок Lego Mindstorms NXT
К нему подключаются двигатели (порты A, B, C)
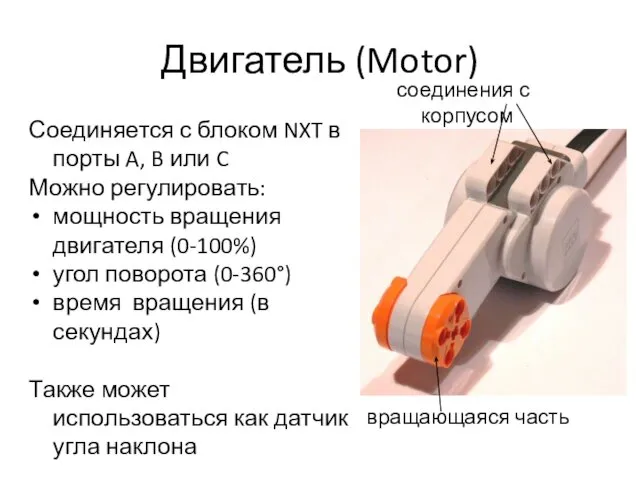
Двигатель (Motor)
Соединяется с блоком NXT в порты A, B или C
Можно
Двигатель (Motor)
Соединяется с блоком NXT в порты A, B или C
Можно

Датчик нажатия (Touch sensor)
Осязание робота
Позволяет “нащупывать” путь (определять, есть ли перед
Датчик нажатия (Touch sensor)
Осязание робота
Позволяет “нащупывать” путь (определять, есть ли перед

Ультразвуковой датчик
(Ultrasonic sensor)
Работает по принципу локатора летучей мыши. Определяет расстояние
Ультразвуковой датчик
(Ultrasonic sensor)
Работает по принципу локатора летучей мыши. Определяет расстояние

Робот с ультразвуковым датчиком
Робот может объезжать препятствия и двигать предметы
Робот с ультразвуковым датчиком
Робот может объезжать препятствия и двигать предметы

Датчик звука (Sound sensor)
Определяет громкость звука
Позволяет роботу “слышать”
Помогает примерно определить направление
Датчик звука (Sound sensor)
Определяет громкость звука
Позволяет роботу “слышать”
Помогает примерно определить направление

Датчик света (Color Sensor)
Позволяет роботу различать цвета и отличать свет от
Датчик света (Color Sensor)
Позволяет роботу различать цвета и отличать свет от

Роботы с датчиком света
Рука-манипулятор, определяющая цвет взятого шарика
Робот, едущий по линии
Роботы с датчиком света
Рука-манипулятор, определяющая цвет взятого шарика
Робот, едущий по линии

Совместное использование датчиков
Робот находит шары, пользуясь ультразвуковым датчиком и определяет их
Совместное использование датчиков
Робот находит шары, пользуясь ультразвуковым датчиком и определяет их

Кабели
Используются для соединения двигателей и датчиков с блоком NXT
Три типа кабелей:
Кабели
Используются для соединения двигателей и датчиков с блоком NXT
Три типа кабелей:

Детали робота
Балки
Штифты
Оси
Шестеренки
Колеса
Прочие
Детали робота
Балки
Штифты
Оси
Шестеренки
Колеса
Прочие

Балки
Основные компоненты корпуса робота
Делятся на прямые и изогнутые (1 или 2
Балки
Основные компоненты корпуса робота
Делятся на прямые и изогнутые (1 или 2

Штифты
Используются для соединения балок между собой и с другими деталями
Бывают:
двухмодульные
трехмодульные
крестообразные
Штифты
Используются для соединения балок между собой и с другими деталями
Бывают:
двухмодульные
трехмодульные
крестообразные

Оси
Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес
Длина оси
Оси
Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес
Длина оси

Шестеренки
Используются для передачи вращения с двигателя на колеса робота, а также
Шестеренки
Используются для передачи вращения с двигателя на колеса робота, а также
 Альбом в мире животных
Альбом в мире животных Деревня Озёрки
Деревня Озёрки Физкультура
Физкультура Пушкин и музыка
Пушкин и музыка Электроизмерительные приборы. Консультация к экзамену
Электроизмерительные приборы. Консультация к экзамену Продажа производственно-промышленной базы. Лесопромышленное предприятие Туртас
Продажа производственно-промышленной базы. Лесопромышленное предприятие Туртас Дистанционное обучение в период самоизоляции
Дистанционное обучение в период самоизоляции Проектирование технологических процессов изготовления деталей
Проектирование технологических процессов изготовления деталей 3
3 Библиотека - территория без границ
Библиотека - территория без границ Асинхронный ход. Асинхронный режим электрической системы
Асинхронный ход. Асинхронный режим электрической системы Ireland
Ireland Методика физкультурного занятия
Методика физкультурного занятия АПРЕЛЯ - ДЕНЬ ВСЕМИРНОГО НАСЛЕДИЯ
АПРЕЛЯ - ДЕНЬ ВСЕМИРНОГО НАСЛЕДИЯ Письмо МИП
Письмо МИП Entwurf parzellierung moglino. (Приложение 1)
Entwurf parzellierung moglino. (Приложение 1) Make Your Own Paper Fan
Make Your Own Paper Fan 20160121_pismennost_narodov_drevnego_egipta_i_dvurechya
20160121_pismennost_narodov_drevnego_egipta_i_dvurechya Передача модальности
Передача модальности Механические свойства строительных материалов
Механические свойства строительных материалов Презентация_Запись корректировка 09.06
Презентация_Запись корректировка 09.06 20121229_zhizn_i_tvorchestvo_gogolya
20121229_zhizn_i_tvorchestvo_gogolya креп-тех-1
креп-тех-1 Великие Русские писатели
Великие Русские писатели Подбор необходимых материалов при реализации дизайн-проекта интерьера
Подбор необходимых материалов при реализации дизайн-проекта интерьера Что вошло и не вошло в настоящий курс. Будущее интернет-маркетинга
Что вошло и не вошло в настоящий курс. Будущее интернет-маркетинга Основные сведения о древесине
Основные сведения о древесине Картошечка с грибочками
Картошечка с грибочками