- Абстрактное моделирование

Содержание
- 2. Цель лекции. Изложение основных понятий и методов моделирования технических процессов. Этапы абстрактного моделирования. Классификация моделей по
- 3. Физическая модель – это копия прибора, приспособления или машины, называемой натуральной, которая подчиняется определенным правилам. Цель
- 4. Этапы абстрактного моделирования Информационная модель Логико-математическая модель Алгоритм и программа Исследование на ЭВМ Интерпретация результатов, проверка
- 5. – это конкретное словесное описание ситуации, изучаемого явления, где отвечается на вопросы: что происходит, почему происходит
- 6. Перед построением математических моделей необходимо составить информационную модель. Классификация моделей по признаку наличия информации: Первая группа
- 7. Классификация моделей: детерминированные, к которым относятся статические (алгебраические) и динамические, представляемые в виде систем дифференциальных уравнений;
- 8. Если расчет на модели дает результаты такого же порядка, как и результаты опытных исследований, можно считать,
- 9. Детерминированные процессы: Закон сохранения массы: dV=(Q1-Q2).dt при плотности Q1=Q2=const, dV – изменение объема жидкости в резервуаре,
- 10. Детерминированные процессы: 2. Закон сохранения импульса силы или количества движения: d(mV)=(ΣF).dt, m – масса тела, V
- 11. Детерминированные процессы: 3. Закон сохранения момента количества движения. Этот закон, как и предыдущий, находит большое применение
- 12. Детерминированные процессы: 4. Закон сохранения энергии: гидромеханика: P – давление, γ - объемный вес, z -
- 13. Детерминированные процессы: Термодинамика Эп+Эк=U=const сумма потенциальной, кинетической и внутренней энергии есть величина постоянная.
- 14. Детерминированные процессы: явления переноса: диффузия; внутреннее трение или вязкость; теплопроводность.
- 15. Распространение молекул примеси в жидкости или газе при отсутствии макроскопических перемещений подчиняется закону Фука где q
- 16. Сила внутреннего трения равна где η - коэффициент вязкости Через газ, заключенный между параллельными стенкам имеющими
- 17. Многие модели в электротехнике строятся на основании закона Ома для постоянного тока: где i — сила
- 18. Так как Q=V.C и dQ=i.dt, имеем dV/dt = i/C. Подставляя dV/dt в уравнение и дифференцируя его,
- 19. На основании первого закона Кирхгофа для сходящихся в точке токов имеем Σi=0 - как выражение закона
- 20. В физике имеется группа уравнений в частных производных, известных под названием уравнений математической физики. Уравнение теплопроводности
- 21. Явление выделения Пусть за время dt выделяется масса dm, определяемая выражением -dm= p·m·dt, где р -
- 22. Уравнение движения поплавка Будем исходить из уравнения баланса массы. Изменение объема воды в резервуаре за время
- 23. Для короткого трубопровода справедливо соотношение: где f(y), [м2] – функция высоты Н. Можно предположить, что f(y)=B·y
- 24. Динамические модели на основе модели поплавка Учет колебаний воды в трубопроводе приводит к сложному явлению «гидравлического
- 25. где m – масса поплавка, где a=γВS/m и 1/T=B/m.
- 26. при dE/dt ≠ 0 получаем типичный вынужденный колебательный процесс Решение этого типа уравнений имеет вид затухающего
- 27. Вероятностные (стохастические) модели В стохастических моделях участвуют случайные величины.
- 28. рассмотрим процесс осаждения группы тяжелых частиц в канале при распределенной скорости воды, являющейся функцией глубины канала.
- 29. частицы испытывают воздействия турбулентных пульсаций скорости потока fx и fy частицы имеют скорость опускания U= f
- 30. вычисляют два случайных числа, равномерно распределенных в пределах 0≤ р ≤1 вычисляют уже нормально распределенные числа
- 31. скорости перемещения частиц будут следующими: по высоте (вниз) — (u+fv) по длине — (v+fx). За время
- 32. Численный эксперимент состоит в последовательном опускании частиц и регистрации расстояния опускания Lx. Целью эксперимента может быть,
- 33. Пример построения математической модели с последующим усложнением Необходимо построить математическую модель смесителя в виде резервуара, в
- 34. При равновесии систем имеем уравнение баланса количества жидкости Q1+Q2=Q3 а также уравнение баланса массы ρ1Q1+ ρ
- 35. Например, ς3=1500 кг/м3 при ς2= -1800 кг/м3, откуда Q2=Q1·(ρ1- ρ3)/(ρ3- ρ2)=0,6·Q1
- 36. В динамике также будем исходить из уравнения сохранения массы - массового баланса за время d t.
- 37. Введем первое ограничение, что резервуар цилиндрический, и тогда dV=F·dh и dm= ρ F · dh +
- 38. Тогда Vd ρ = (Q1 ρ1+Q2 ρ2-Q3 ρ) dt получаем Решение -1/b ·ln(a-by)=x+c или –ln(ρ∞-ρ)=t/T+C, где
- 39. Рассмотрим более общую модель dV=F·dh+h·dF=(Q1+Q2-Q3) · dt, где При F=const, dV=F·dh
- 40. Баланс массы
- 41. Подставим вместо dv/dt
- 42. Марковские цепи Для описания многих явлений, которые можно представить как совокупность ряда состояний, в современной вычислительной
- 43. рассмотрим диффузионное осаждение тяжелых частиц в жидкости, приняв одномерную модель. Частица, находящаяся в i -м слое,
- 44. Частицы могут переходить и на более удалённые слои, то есть Pi,i-j , …, Pi,i+1.
- 45. Пользуясь матричным исчислением, можно представить переход из одной временной совокупности состояний в совокупность состояний для момента
- 46. Например, при размерности матрицы, равной трем, имеем: Тогда
- 47. Если речь идет о количестве частиц в замкнутом резервуаре, то соблюдается закон сохранения
- 48. Связь между дифференциальным уравнение в частных производных параболического типа и цепями Маркова уравнения Фоккера-Планка: где в
- 49. производные в виде конечных разностей
- 50. Конечно-разностный аналог уравнения
- 51. Обозначая имеем
- 52. Обозначим также Рi,i=1-2c, Pi-1,i= - b+c, Pi+1,i= - b+c Так как b>0 и с>0, то для
- 53. Формулы вычислений имеют вид Формы для вычисления шага интегрирования или, точнее, дискретного шага расчета марковской цепи.
- 54. Имитационное моделирование Имитационное моделирование является перспективным направлением моделирования явлений и процессов в природе и технике. Оно
- 55. рассмотрим модель, в которой волк преследует зайца. Пусть в момент времени t=t0 заяц находится в точке
- 56. Составим - дифференциальное уравнение, описывающее движение волка. Пусть за время dt заяц переместился на dxz=Vz dt,
- 57. Так как при t=0 заяц находится в начале координат, то xz=Vz·· t. Таким образом, в качестве
- 59. Скачать презентацию
Цель лекции.
Изложение основных понятий и методов моделирования технических процессов.
Этапы абстрактного моделирования.
Классификация
Цель лекции.
Изложение основных понятий и методов моделирования технических процессов.
Этапы абстрактного моделирования.
Классификация
Физическая модель – это копия прибора, приспособления или машины, называемой натуральной,
Физическая модель – это копия прибора, приспособления или машины, называемой натуральной,

Этапы абстрактного моделирования
Информационная модель
Логико-математическая модель
Алгоритм и программа
Исследование на ЭВМ
Интерпретация результатов, проверка
Этапы абстрактного моделирования
Информационная модель
Логико-математическая модель
Алгоритм и программа
Исследование на ЭВМ
Интерпретация результатов, проверка
– это конкретное словесное описание ситуации, изучаемого явления, где отвечается на
– это конкретное словесное описание ситуации, изучаемого явления, где отвечается на
Перед построением математических моделей необходимо составить информационную модель.
Классификация моделей по признаку
Перед построением математических моделей необходимо составить информационную модель.
Классификация моделей по признаку
Классификация моделей:
детерминированные, к которым относятся статические
(алгебраические) и динамические, представляемые в виде
Классификация моделей:
детерминированные, к которым относятся статические (алгебраические) и динамические, представляемые в виде
Если расчет на модели дает результаты такого же порядка, как и
Если расчет на модели дает результаты такого же порядка, как и

Детерминированные процессы:
Закон сохранения массы:
dV=(Q1-Q2).dt
при плотности Q1=Q2=const, dV – изменение объема жидкости
Детерминированные процессы:
Закон сохранения массы:
dV=(Q1-Q2).dt
при плотности Q1=Q2=const, dV – изменение объема жидкости
Детерминированные процессы:
2. Закон сохранения импульса силы или количества движения:
d(mV)=(ΣF).dt,
m –
Детерминированные процессы:
2. Закон сохранения импульса силы или количества движения:
d(mV)=(ΣF).dt,
m –
Детерминированные процессы:
3. Закон сохранения момента количества движения.
Этот закон, как и предыдущий,
Детерминированные процессы:
3. Закон сохранения момента количества движения.
Этот закон, как и предыдущий,
Детерминированные процессы:
4. Закон сохранения энергии:
гидромеханика:
P – давление, γ - объемный вес,
Детерминированные процессы:
4. Закон сохранения энергии:
гидромеханика:
P – давление, γ - объемный вес,
Детерминированные процессы:
Термодинамика
Эп+Эк=U=const
сумма потенциальной, кинетической и внутренней энергии есть величина постоянная.
Детерминированные процессы:
Термодинамика
Эп+Эк=U=const
сумма потенциальной, кинетической и внутренней энергии есть величина постоянная.
Детерминированные процессы:
явления переноса:
диффузия;
внутреннее трение или вязкость;
теплопроводность.
Детерминированные процессы:
явления переноса:
диффузия;
внутреннее трение или вязкость;
теплопроводность.
Распространение молекул примеси в жидкости или газе при отсутствии макроскопических перемещений
Распространение молекул примеси в жидкости или газе при отсутствии макроскопических перемещений
Сила внутреннего трения равна
где η - коэффициент вязкости
Через газ, заключенный
Сила внутреннего трения равна
где η - коэффициент вязкости
Через газ, заключенный
Многие модели в электротехнике строятся на основании закона Ома для постоянного
Многие модели в электротехнике строятся на основании закона Ома для постоянного
Так как Q=V.C и dQ=i.dt, имеем dV/dt = i/C. Подставляя dV/dt
Так как Q=V.C и dQ=i.dt, имеем dV/dt = i/C. Подставляя dV/dt
На основании первого закона Кирхгофа для сходящихся в точке токов имеем
На основании первого закона Кирхгофа для сходящихся в точке токов имеем
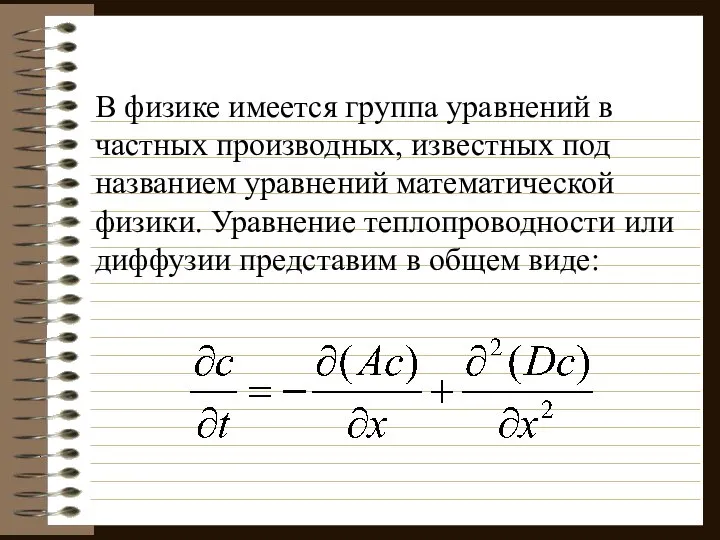
В физике имеется группа уравнений в частных производных, известных под названием
В физике имеется группа уравнений в частных производных, известных под названием

Явление выделения
Пусть за время dt выделяется масса dm, определяемая выражением
-dm= p·m·dt,
где
Явление выделения
Пусть за время dt выделяется масса dm, определяемая выражением
-dm= p·m·dt,
где
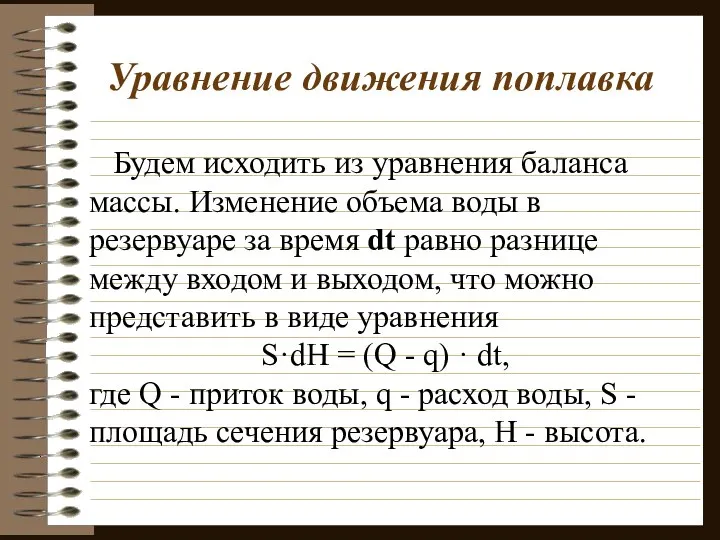
Уравнение движения поплавка
Будем исходить из уравнения баланса массы. Изменение объема
Уравнение движения поплавка
Будем исходить из уравнения баланса массы. Изменение объема
![Для короткого трубопровода справедливо соотношение: где f(y), [м2] – функция высоты](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1302541/slide-22.jpg)
Для короткого трубопровода справедливо соотношение:
где f(y), [м2] – функция высоты Н.
Для короткого трубопровода справедливо соотношение:
где f(y), [м2] – функция высоты Н.
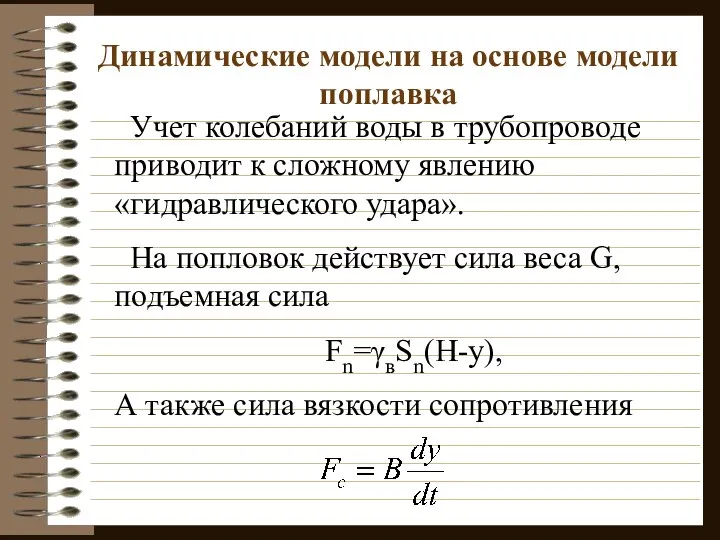
Динамические модели на основе модели поплавка
Учет колебаний воды в трубопроводе
Динамические модели на основе модели поплавка
Учет колебаний воды в трубопроводе
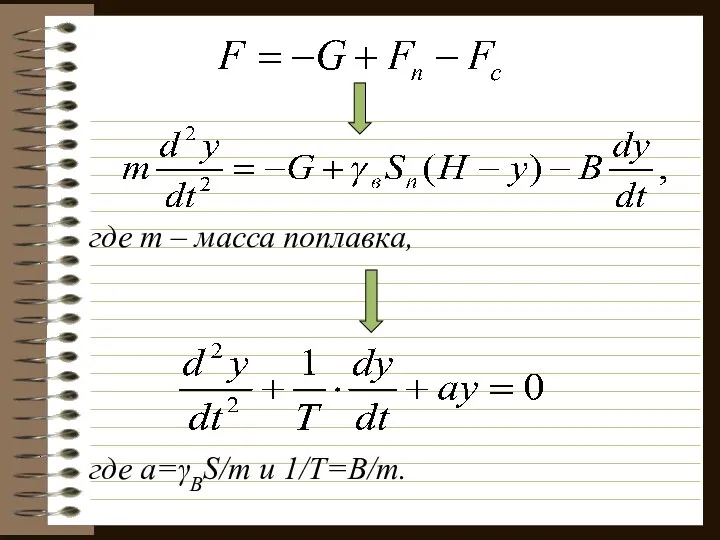
где m – масса поплавка,
где a=γВS/m и 1/T=B/m.
где m – масса поплавка,
где a=γВS/m и 1/T=B/m.

при dE/dt ≠ 0 получаем типичный вынужденный колебательный процесс
Решение этого
при dE/dt ≠ 0 получаем типичный вынужденный колебательный процесс
Решение этого
Вероятностные (стохастические) модели
В стохастических моделях участвуют случайные величины.
Вероятностные (стохастические) модели
В стохастических моделях участвуют случайные величины.
рассмотрим процесс осаждения группы тяжелых частиц в канале при распределенной скорости
рассмотрим процесс осаждения группы тяжелых частиц в канале при распределенной скорости
частицы испытывают воздействия турбулентных пульсаций скорости потока fx и fy
частицы
частицы испытывают воздействия турбулентных пульсаций скорости потока fx и fy
частицы
вычисляют два случайных числа, равномерно распределенных в пределах 0≤ р ≤1
вычисляют два случайных числа, равномерно распределенных в пределах 0≤ р ≤1
скорости перемещения частиц будут следующими:
по высоте (вниз) — (u+fv)
по
скорости перемещения частиц будут следующими:
по высоте (вниз) — (u+fv)
по
Численный эксперимент состоит в последовательном опускании частиц и регистрации расстояния опускания
Численный эксперимент состоит в последовательном опускании частиц и регистрации расстояния опускания
Пример построения математической модели с последующим усложнением
Необходимо построить математическую
Пример построения математической модели с последующим усложнением
Необходимо построить математическую
При равновесии систем имеем уравнение баланса количества жидкости
Q1+Q2=Q3
а также
При равновесии систем имеем уравнение баланса количества жидкости
Q1+Q2=Q3
а также
Например, ς3=1500 кг/м3 при
ς2= -1800 кг/м3, откуда
Q2=Q1·(ρ1- ρ3)/(ρ3- ρ2)=0,6·Q1
Например, ς3=1500 кг/м3 при
ς2= -1800 кг/м3, откуда
Q2=Q1·(ρ1- ρ3)/(ρ3- ρ2)=0,6·Q1
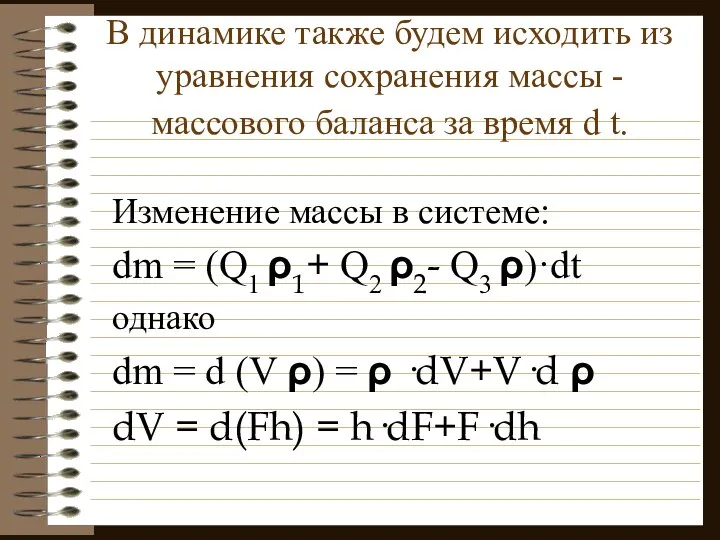
В динамике также будем исходить из уравнения сохранения массы - массового
В динамике также будем исходить из уравнения сохранения массы - массового
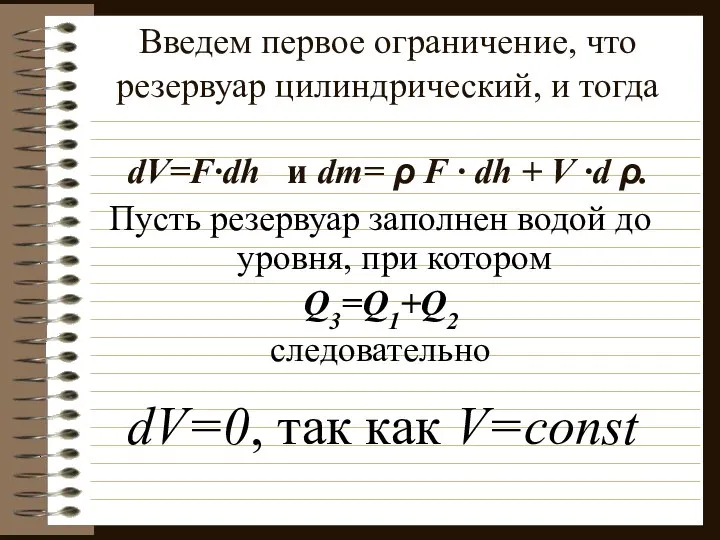
Введем первое ограничение, что резервуар цилиндрический, и тогда
dV=F·dh и dm=
Введем первое ограничение, что резервуар цилиндрический, и тогда dV=F·dh и dm=
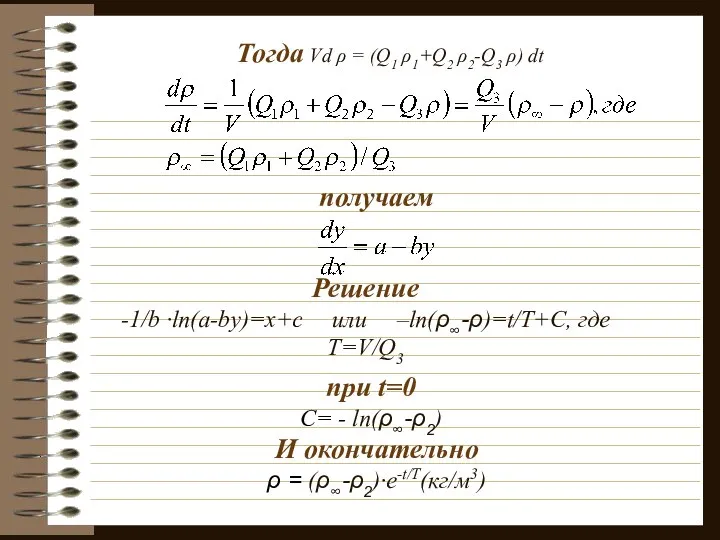
Тогда Vd ρ = (Q1 ρ1+Q2 ρ2-Q3 ρ) dt
получаем
Решение
-1/b ·ln(a-by)=x+c или
Тогда Vd ρ = (Q1 ρ1+Q2 ρ2-Q3 ρ) dt
получаем
Решение -1/b ·ln(a-by)=x+c или
Рассмотрим более общую модель
dV=F·dh+h·dF=(Q1+Q2-Q3) · dt, где
При F=const, dV=F·dh
Рассмотрим более общую модель
dV=F·dh+h·dF=(Q1+Q2-Q3) · dt, где
При F=const, dV=F·dh
Баланс массы
Баланс массы
Подставим вместо dv/dt
Подставим вместо dv/dt

Марковские цепи
Для описания многих явлений, которые можно представить как совокупность
Марковские цепи
Для описания многих явлений, которые можно представить как совокупность

рассмотрим диффузионное осаждение тяжелых частиц в жидкости, приняв одномерную модель.
Частица,
рассмотрим диффузионное осаждение тяжелых частиц в жидкости, приняв одномерную модель.
Частица,
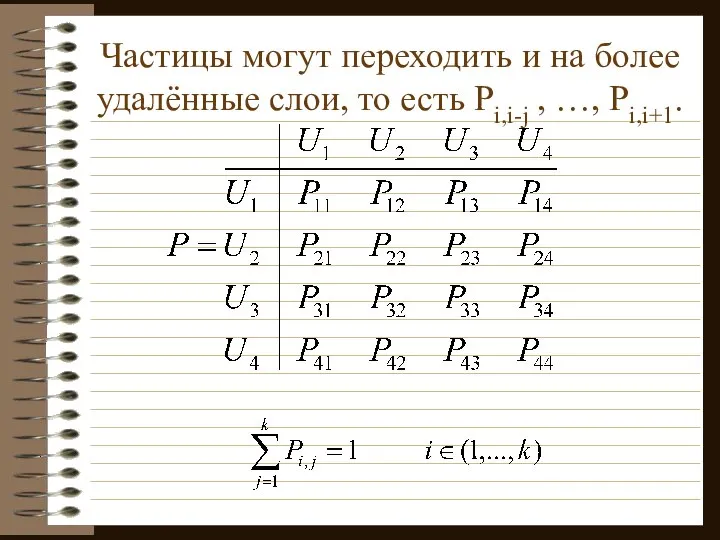
Частицы могут переходить и на более удалённые слои, то есть Pi,i-j
Частицы могут переходить и на более удалённые слои, то есть Pi,i-j
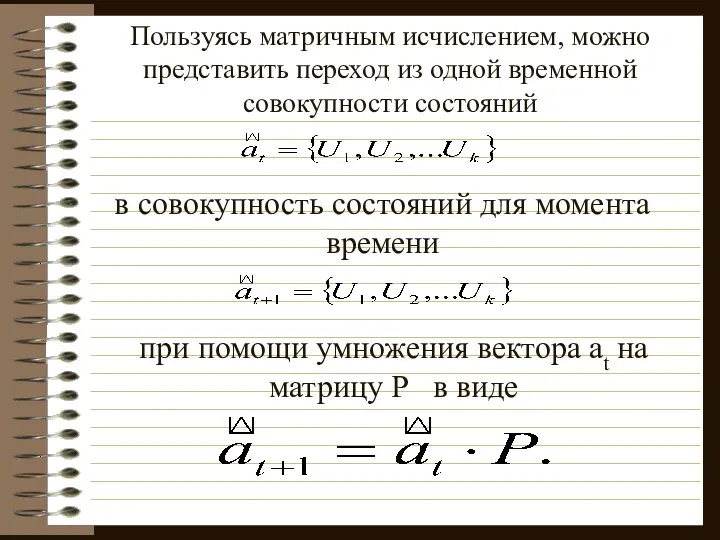
Пользуясь матричным исчислением, можно представить переход из одной временной совокупности состояний
в
Пользуясь матричным исчислением, можно представить переход из одной временной совокупности состояний
в
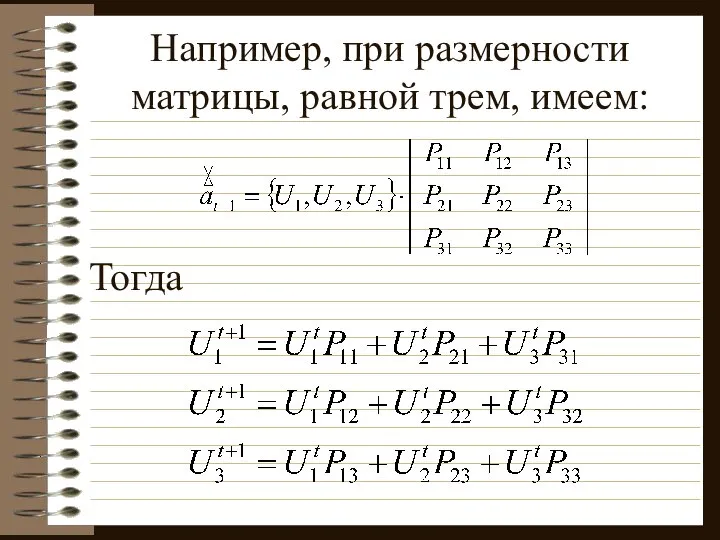
Например, при размерности матрицы, равной трем, имеем:
Тогда
Например, при размерности матрицы, равной трем, имеем:
Тогда

Если речь идет о количестве частиц в замкнутом резервуаре, то соблюдается
Если речь идет о количестве частиц в замкнутом резервуаре, то соблюдается
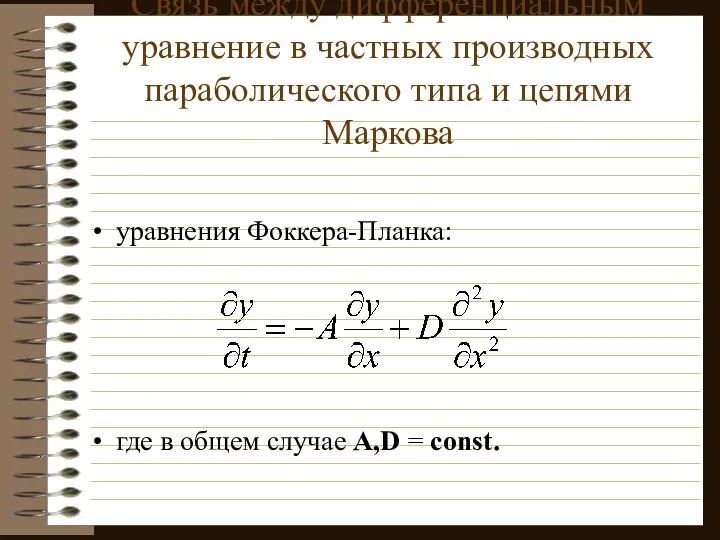
Связь между дифференциальным уравнение в частных производных параболического типа и цепями
Связь между дифференциальным уравнение в частных производных параболического типа и цепями
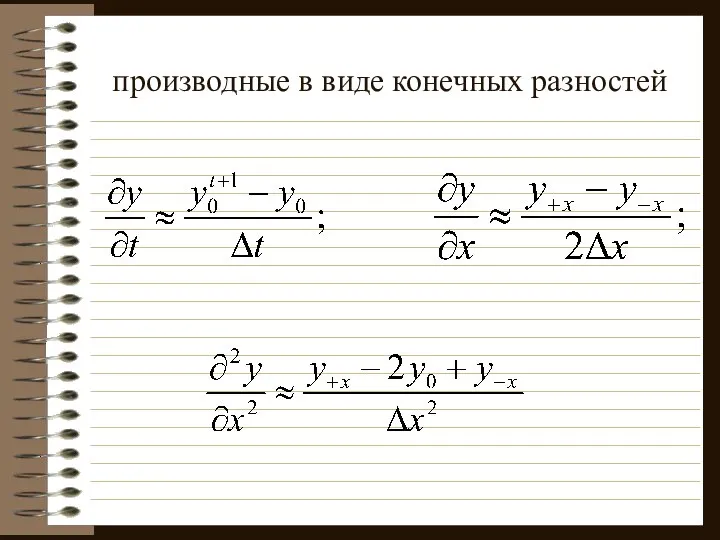
производные в виде конечных разностей
производные в виде конечных разностей

Конечно-разностный аналог уравнения
Конечно-разностный аналог уравнения
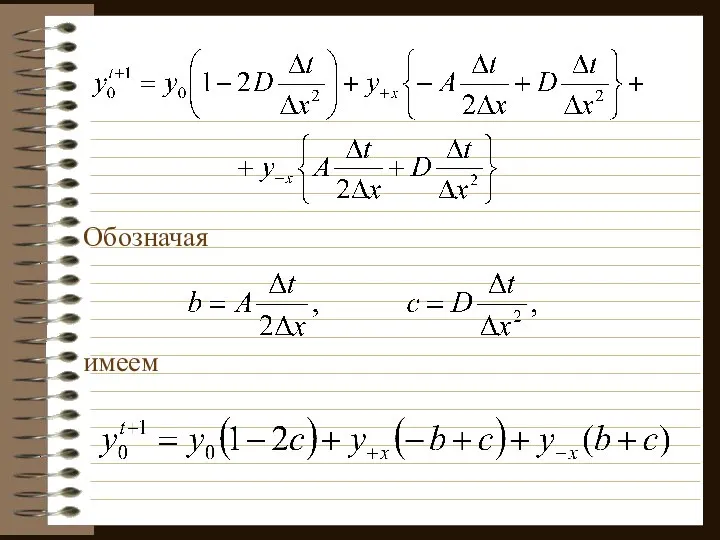
Обозначая
имеем
Обозначая
имеем
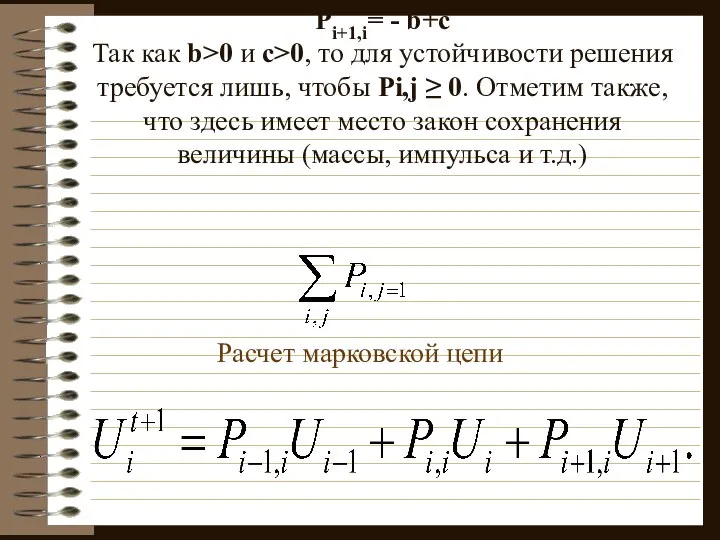
Обозначим также Рi,i=1-2c, Pi-1,i= - b+c,
Pi+1,i= - b+c
Так как
Обозначим также Рi,i=1-2c, Pi-1,i= - b+c, Pi+1,i= - b+c Так как
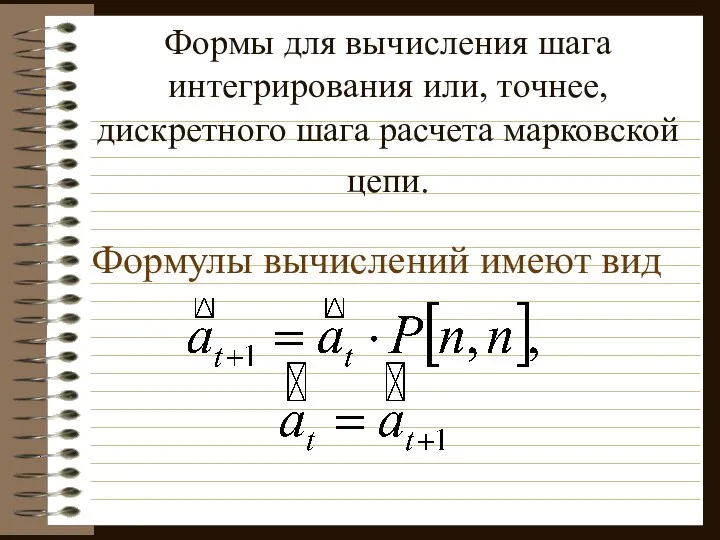
Формулы вычислений имеют вид
Формы для вычисления шага интегрирования или, точнее, дискретного
Формулы вычислений имеют вид
Формы для вычисления шага интегрирования или, точнее, дискретного
Имитационное моделирование
Имитационное моделирование является перспективным направлением моделирования явлений и процессов в
Имитационное моделирование
Имитационное моделирование является перспективным направлением моделирования явлений и процессов в
рассмотрим модель, в которой волк преследует зайца. Пусть в момент времени
рассмотрим модель, в которой волк преследует зайца. Пусть в момент времени
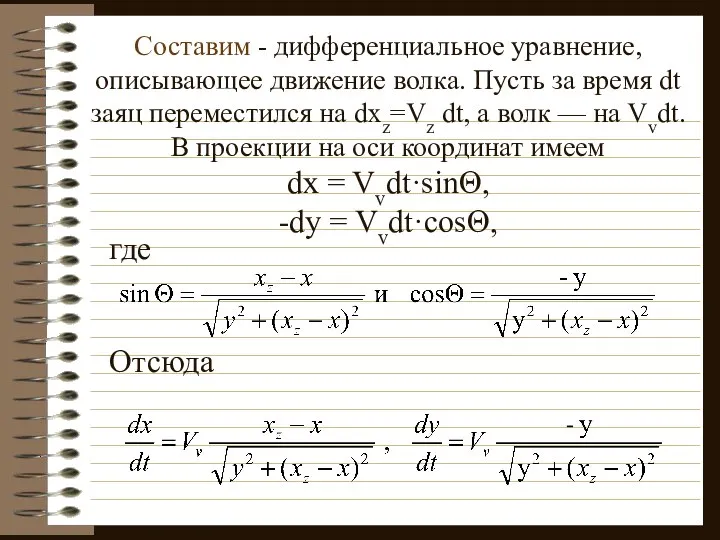
Составим - дифференциальное уравнение, описывающее движение волка. Пусть за время dt
Составим - дифференциальное уравнение, описывающее движение волка. Пусть за время dt
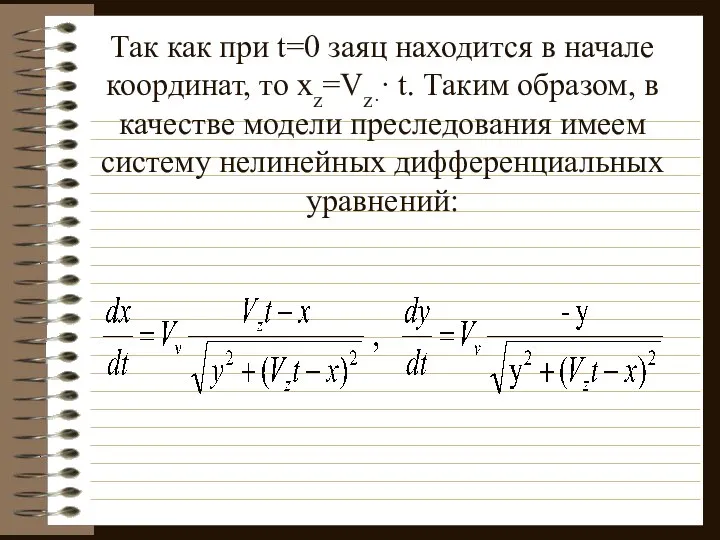
Так как при t=0 заяц находится в начале координат, то xz=Vz··
Так как при t=0 заяц находится в начале координат, то xz=Vz··
 Презентация "Предпринимательство и бизнес" - скачать презентации по Экономике
Презентация "Предпринимательство и бизнес" - скачать презентации по Экономике Ремонт и обслуживание тепловентилятора
Ремонт и обслуживание тепловентилятора Co to jest DEKALOG
Co to jest DEKALOG Спортивные танцы на колясках
Спортивные танцы на колясках Україна і Світ
Україна і Світ Проектирование свайных фундаментов
Проектирование свайных фундаментов План первого этажа здания
План первого этажа здания Пирамидальная сортировка. Лекция 8
Пирамидальная сортировка. Лекция 8 Аппаратная поддержка порядка операций обращения в память в системе на кристалле «Эльбрус-2S»
Аппаратная поддержка порядка операций обращения в память в системе на кристалле «Эльбрус-2S» АЛЕКСЕЙ ГАВРИЛОВИЧ ВЕНЕЦИАНОВ (1780-1847)
АЛЕКСЕЙ ГАВРИЛОВИЧ ВЕНЕЦИАНОВ (1780-1847) Словарь часовых терминов
Словарь часовых терминов Христианство
Христианство Презентация на тему "Организация интегрированного обучения детей с задержкой психического развития и интеллектуальной недост
Презентация на тему "Организация интегрированного обучения детей с задержкой психического развития и интеллектуальной недост Дети и Интернет Материал для беседы с родителями шестиклассников
Дети и Интернет Материал для беседы с родителями шестиклассников Показатели эффективности деятельности кадровой службы организации
Показатели эффективности деятельности кадровой службы организации Терроризм. Причины терроризма
Терроризм. Причины терроризма Европейский союз. (EC)
Европейский союз. (EC)  Интеграция, как процесс объединения стран мира Семетеева Б.С. Т093
Интеграция, как процесс объединения стран мира Семетеева Б.С. Т093 весенние цветы - презентация для начальной школы
весенние цветы - презентация для начальной школы Алхимия
Алхимия ВНУТРИУТРОБНОЕ РАЗВИТИЕ ЧЕЛОВЕКА
ВНУТРИУТРОБНОЕ РАЗВИТИЕ ЧЕЛОВЕКА Основные принципы оценочной деятельности
Основные принципы оценочной деятельности  аппарат движения
аппарат движения Презентация Международная конкурентоспособность стран на рынке
Презентация Международная конкурентоспособность стран на рынке 06-Understanding JavaScript and Coding Essentials
06-Understanding JavaScript and Coding Essentials Природные каменные материалы
Природные каменные материалы Новый интернет Спецпроекты (вирусный маркетинг, конкурсы, разное)
Новый интернет Спецпроекты (вирусный маркетинг, конкурсы, разное) JavaScript. Условные операторы
JavaScript. Условные операторы