- Алгоритмы траекторной обработки данных

Содержание
- 2. ОСНОВНЫЕ ПОНЯТИЯ ТРАЕКТОРНОЙ ОБРАБОТКИ ДАННЫХ Отметка радара Траектория Строб Канал автосопровождения Мультирадарные траектории Алгоритмы сопровождения целей
- 3. Отметка радара соответствует обнаружению объекта радаром в определенный момент времени. Отметка несет информацию: о координатах обнаруженного
- 4. Траектория представляет из себя набор: информации о параметрах движения цели (координаты, скорость, курс, высоту, ускорение); дополнительных
- 5. СТРОБ - ограниченная область пространства, в которой с заданной вероятностью ожидается появление ВС Строб используют для
- 6. ФОРМА СТРОБА В соответствии с вероятностным подходом строб строится вокруг экстраполированной точки Е. Форма и размер
- 7. Строб предназначен для привязки пришедшей отметки радара к существующей траектории. Строб содержит - сведения об области
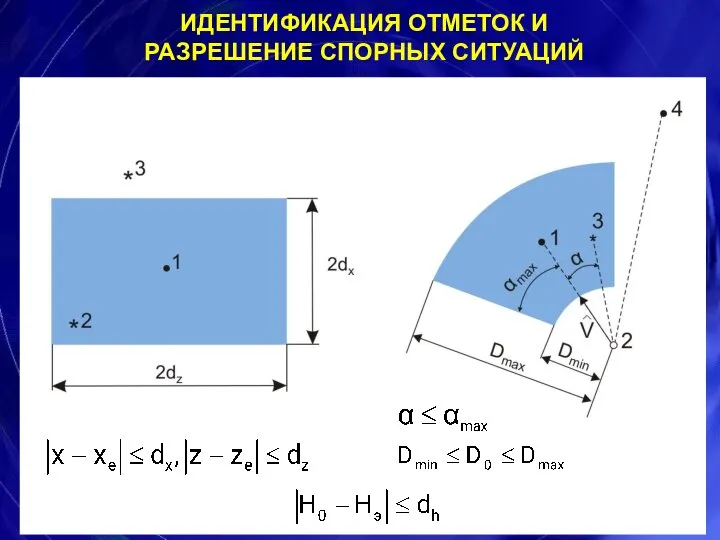
- 8. ИДЕНТИФИКАЦИЯ ОТМЕТОК И РАЗРЕШЕНИЕ СПОРНЫХ СИТУАЦИЙ
- 9. СТРОБ МАНЕВРА
- 10. АВТОЗАХВАТ И СОПРОВОЖДЕНИЕ ЦЕЛИ
- 11. КАНАЛ АВТОСОПРОВОЖДЕНИЯ Автосопровождение - процесс последовательного наблюдения за движением отдельного объекта (цели). В процессе сопровождения вся
- 12. СОСТАВ КАНАЛА АВТОСОПРОВОЖДЕНИЯ номер формуляра; оценки координат (точечные, интервальные); оценки параметров движения (скорости, путевого угла и
- 13. АЛГОРИТМ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ
- 14. Установлен следующий порядок проверки стробов на попадание отметки: строб маневра (больший по объему) – определение принадлежности
- 15. Траектория нулевого цикла переводится в режим захвата с приходом в ее строб второй отметки. Особенность траекторий
- 16. Применяется для обеспечения стабильного сопровождения ВС путем анализа информации, поступающей сразу от нескольких радаров. В реальных
- 17. Мультирадарная траектория представляет собой совокупность нескольких обычных траекторий, которые были отнесены к одному и тому же
- 18. Вариант «монорадар»: Предусматривает использование только одной из траекторий, игнорируя остальные. Такой прием используется на участках, где
- 19. Вариант «виртуальный радар»: Суть метода состоит в сочетании независимой обработки информации от каждого отдельного источника и
- 20. АЛГОРИТМ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ (МРТ)
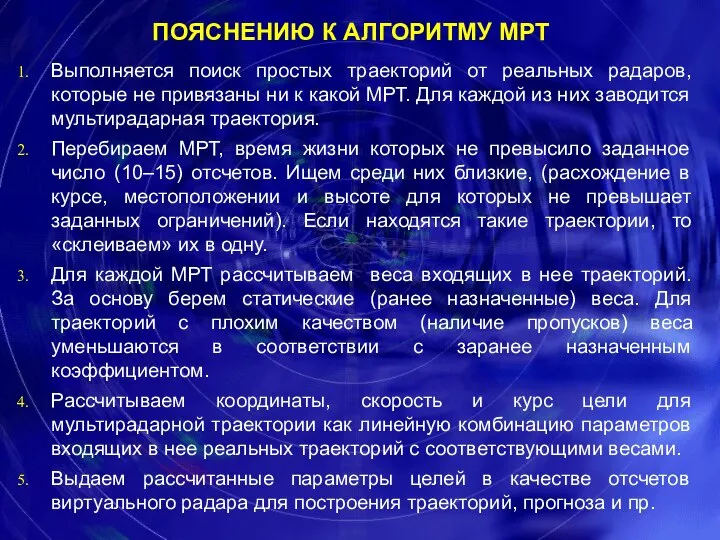
- 21. ПОЯСНЕНИЮ К АЛГОРИТМУ МРТ Выполняется поиск простых траекторий от реальных радаров, которые не привязаны ни к
- 22. ПОСТРОЕНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ
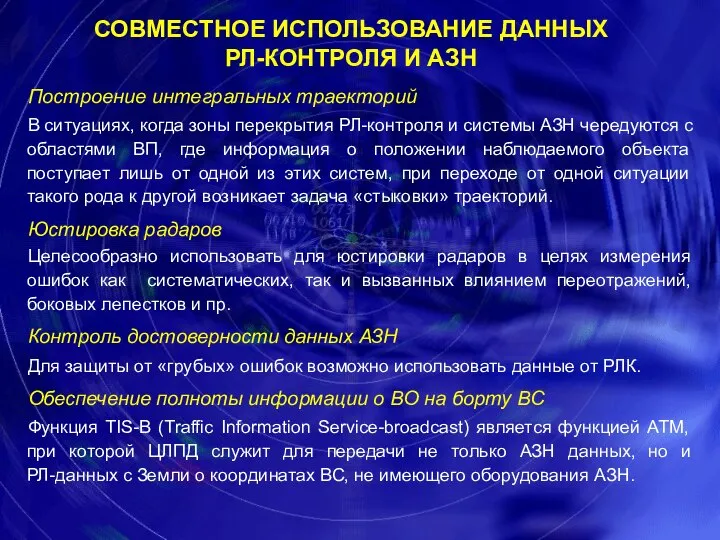
- 23. СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ ДАННЫХ РЛ-КОНТРОЛЯ И АЗН Построение интегральных траекторий В ситуациях, когда зоны перекрытия РЛ-контроля и
- 24. МОДИФИЦИРОВАННЫЙ α - β ФИЛЬТР - реальные ; - сглаженные ; x x0 x1 x2 x3
- 25. СКОЛЬЗЯЩЕЕ СГЛАЖИВАНИЕ ПО α-β ФИЛЬТРУ
- 26. ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ КООРДИНАТ ОТ ЧИСЛА НАБЛЮДЕНИЙ
- 27. ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ СКОРОСТИ ОТ ЧИСЛА НАБЛЮДЕНИЙ
- 28. ФОРМАЛЬНОЕ ОПРЕДЕЛЕНИЕ ИМ
- 30. ПОСТРОЕНИЕ ИМ x
- 31. МНОЖЕСТВО ПРОГНОЗА И МНОЖЕСТВО НЕОПРЕДЕЛЕННОСТИ ЗАМЕРА
- 32. СРЫВ СОПРОВОЖДЕНИЯ
- 33. АЛГОРИТМ ПОСТРОЕНИЯ ИНФОРМАЦИОННОЙ ТРУБКИ Нет Нет Да Нет Да Начало Ввод исходных данных Ввод очередного замера
- 34. ЗАДАЧА ОБНАРУЖЕНИЯ ПКС I1 I2
- 35. НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
- 36. НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
- 38. Скачать презентацию

ОСНОВНЫЕ ПОНЯТИЯ
ТРАЕКТОРНОЙ ОБРАБОТКИ ДАННЫХ
Отметка радара
Траектория
Строб
Канал автосопровождения
Мультирадарные траектории
Алгоритмы сопровождения целей
ОСНОВНЫЕ ПОНЯТИЯ
ТРАЕКТОРНОЙ ОБРАБОТКИ ДАННЫХ
Отметка радара
Траектория
Строб
Канал автосопровождения
Мультирадарные траектории
Алгоритмы сопровождения целей
Отметка радара соответствует обнаружению объекта радаром в определенный момент времени.
Отметка несет
Отметка радара соответствует обнаружению объекта радаром в определенный момент времени.
Отметка несет
Траектория представляет из себя набор:
информации о параметрах движения цели
(координаты, скорость,
Траектория представляет из себя набор:
информации о параметрах движения цели
(координаты, скорость,
СТРОБ - ограниченная область пространства, в которой с заданной вероятностью ожидается
СТРОБ - ограниченная область пространства, в которой с заданной вероятностью ожидается
ФОРМА СТРОБА
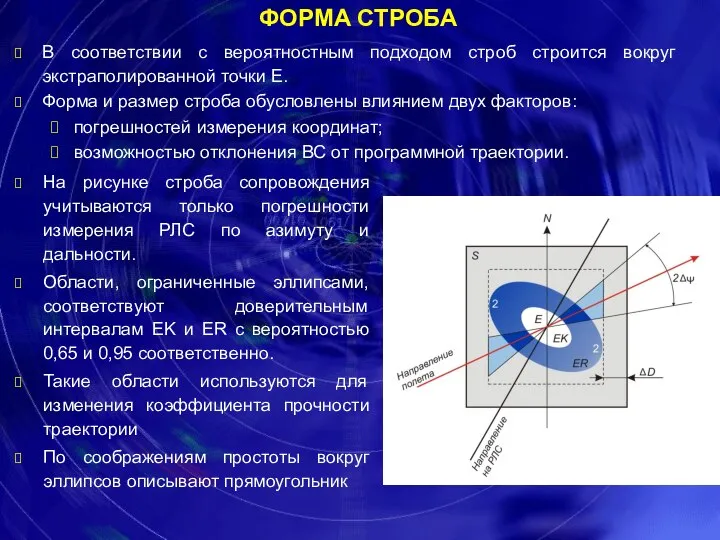
В соответствии с вероятностным подходом строб строится вокруг экстраполированной точки
ФОРМА СТРОБА
В соответствии с вероятностным подходом строб строится вокруг экстраполированной точки

Строб предназначен для привязки пришедшей отметки радара к существующей траектории.
Строб содержит
Строб предназначен для привязки пришедшей отметки радара к существующей траектории.
Строб содержит
ИДЕНТИФИКАЦИЯ ОТМЕТОК И
РАЗРЕШЕНИЕ СПОРНЫХ СИТУАЦИЙ
ИДЕНТИФИКАЦИЯ ОТМЕТОК И
РАЗРЕШЕНИЕ СПОРНЫХ СИТУАЦИЙ

СТРОБ МАНЕВРА
СТРОБ МАНЕВРА
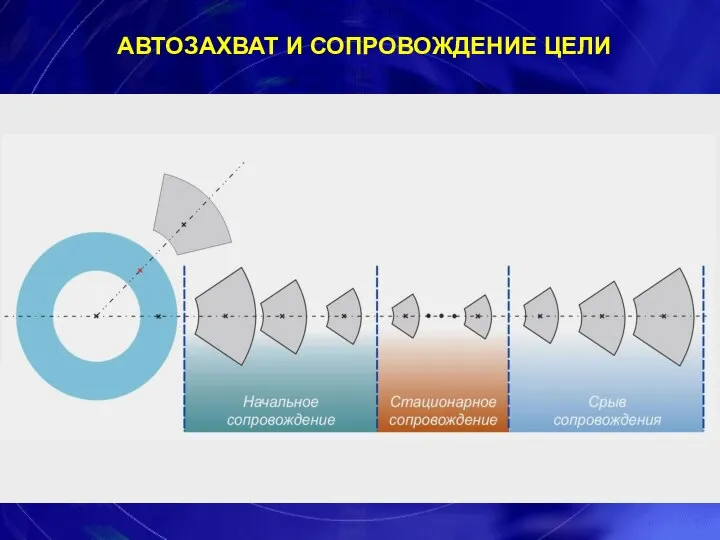
АВТОЗАХВАТ И СОПРОВОЖДЕНИЕ ЦЕЛИ
АВТОЗАХВАТ И СОПРОВОЖДЕНИЕ ЦЕЛИ
КАНАЛ АВТОСОПРОВОЖДЕНИЯ
Автосопровождение - процесс последовательного наблюдения за движением отдельного объекта (цели).
В
КАНАЛ АВТОСОПРОВОЖДЕНИЯ
Автосопровождение - процесс последовательного наблюдения за движением отдельного объекта (цели).
В
СОСТАВ КАНАЛА АВТОСОПРОВОЖДЕНИЯ
номер формуляра;
оценки координат (точечные, интервальные);
оценки параметров движения (скорости, путевого
СОСТАВ КАНАЛА АВТОСОПРОВОЖДЕНИЯ
номер формуляра;
оценки координат (точечные, интервальные);
оценки параметров движения (скорости, путевого

АЛГОРИТМ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ
АЛГОРИТМ СОПРОВОЖДЕНИЯ ТРАЕКТОРИЙ
Установлен следующий порядок проверки стробов на попадание отметки:
строб маневра (больший по
Установлен следующий порядок проверки стробов на попадание отметки:
строб маневра (больший по

Траектория нулевого цикла переводится в режим захвата с приходом в ее
Траектория нулевого цикла переводится в режим захвата с приходом в ее
Применяется для обеспечения стабильного сопровождения ВС путем анализа информации, поступающей сразу
Применяется для обеспечения стабильного сопровождения ВС путем анализа информации, поступающей сразу
Мультирадарная траектория представляет собой совокупность нескольких обычных траекторий, которые были отнесены
Мультирадарная траектория представляет собой совокупность нескольких обычных траекторий, которые были отнесены
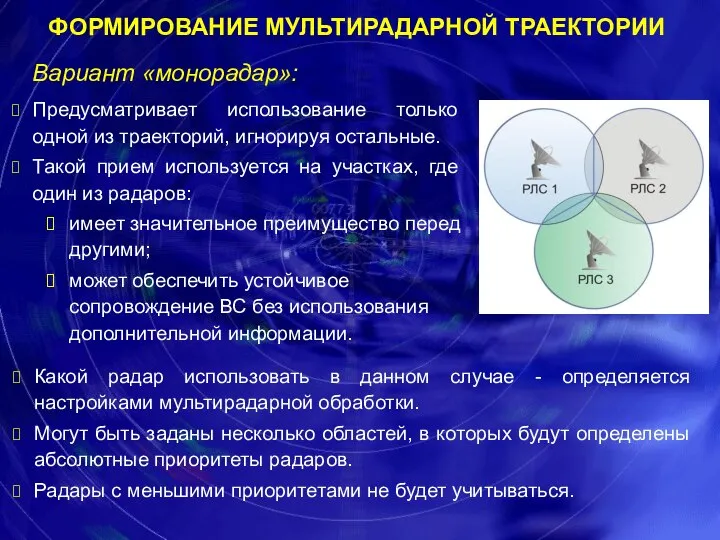
Вариант «монорадар»:
Предусматривает использование только одной из траекторий, игнорируя остальные.
Такой прием
Вариант «монорадар»:
Предусматривает использование только одной из траекторий, игнорируя остальные.
Такой прием

Вариант «виртуальный радар»:
Суть метода состоит в сочетании независимой обработки информации
Вариант «виртуальный радар»:
Суть метода состоит в сочетании независимой обработки информации

АЛГОРИТМ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ (МРТ)
АЛГОРИТМ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ (МРТ)
ПОЯСНЕНИЮ К АЛГОРИТМУ МРТ
Выполняется поиск простых траекторий от реальных радаров, которые
ПОЯСНЕНИЮ К АЛГОРИТМУ МРТ
Выполняется поиск простых траекторий от реальных радаров, которые

ПОСТРОЕНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ
ПОСТРОЕНИЕ МУЛЬТИРАДАРНОЙ ТРАЕКТОРИИ
СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ ДАННЫХ
РЛ-КОНТРОЛЯ И АЗН
Построение интегральных траекторий
В ситуациях, когда
СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ ДАННЫХ
РЛ-КОНТРОЛЯ И АЗН
Построение интегральных траекторий
В ситуациях, когда

МОДИФИЦИРОВАННЫЙ α - β ФИЛЬТР
- реальные ;
- сглаженные ;
x
x0
x1
x2
x3
x4
z
z0
z1
z2
z3
z4
t0
t2
t3
t4
V1
V2
-
МОДИФИЦИРОВАННЫЙ α - β ФИЛЬТР
- реальные ;
- сглаженные ;
x
x0
x1
x2
x3
x4
z
z0
z1
z2
z3
z4
t0
t2
t3
t4
V1
V2
-
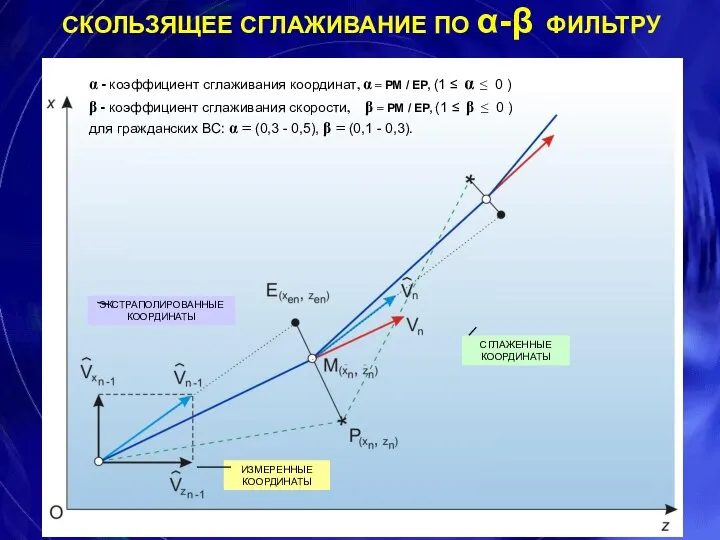
СКОЛЬЗЯЩЕЕ СГЛАЖИВАНИЕ ПО α-β ФИЛЬТРУ
СКОЛЬЗЯЩЕЕ СГЛАЖИВАНИЕ ПО α-β ФИЛЬТРУ

ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ КООРДИНАТ ОТ ЧИСЛА НАБЛЮДЕНИЙ
ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ КООРДИНАТ ОТ ЧИСЛА НАБЛЮДЕНИЙ
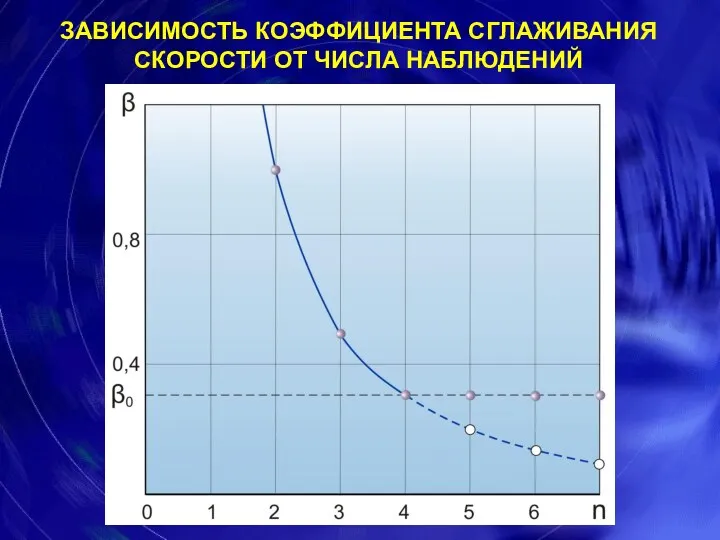
ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ СКОРОСТИ ОТ ЧИСЛА НАБЛЮДЕНИЙ
ЗАВИСИМОСТЬ КОЭФФИЦИЕНТА СГЛАЖИВАНИЯ СКОРОСТИ ОТ ЧИСЛА НАБЛЮДЕНИЙ

ФОРМАЛЬНОЕ ОПРЕДЕЛЕНИЕ ИМ
ФОРМАЛЬНОЕ ОПРЕДЕЛЕНИЕ ИМ


ПОСТРОЕНИЕ ИМ
x
ПОСТРОЕНИЕ ИМ
x
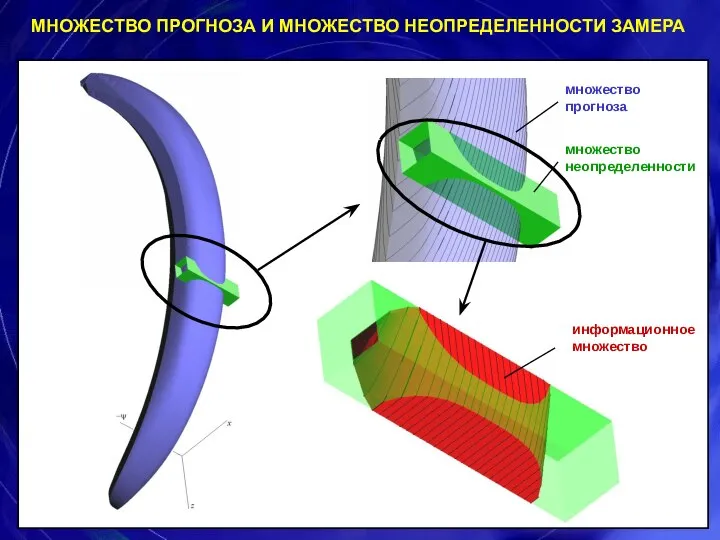
МНОЖЕСТВО ПРОГНОЗА И МНОЖЕСТВО НЕОПРЕДЕЛЕННОСТИ ЗАМЕРА
МНОЖЕСТВО ПРОГНОЗА И МНОЖЕСТВО НЕОПРЕДЕЛЕННОСТИ ЗАМЕРА

СРЫВ СОПРОВОЖДЕНИЯ
СРЫВ СОПРОВОЖДЕНИЯ

АЛГОРИТМ ПОСТРОЕНИЯ ИНФОРМАЦИОННОЙ ТРУБКИ
Нет
Нет
Да
Нет
Да
Начало
Ввод исходных данных
Ввод очередного замера
Замер совместный?
Вычисление статистик
Переход
на
АЛГОРИТМ ПОСТРОЕНИЯ ИНФОРМАЦИОННОЙ ТРУБКИ
Нет
Нет
Да
Нет
Да
Начало
Ввод исходных данных
Ввод очередного замера
Замер совместный?
Вычисление статистик
Переход
на
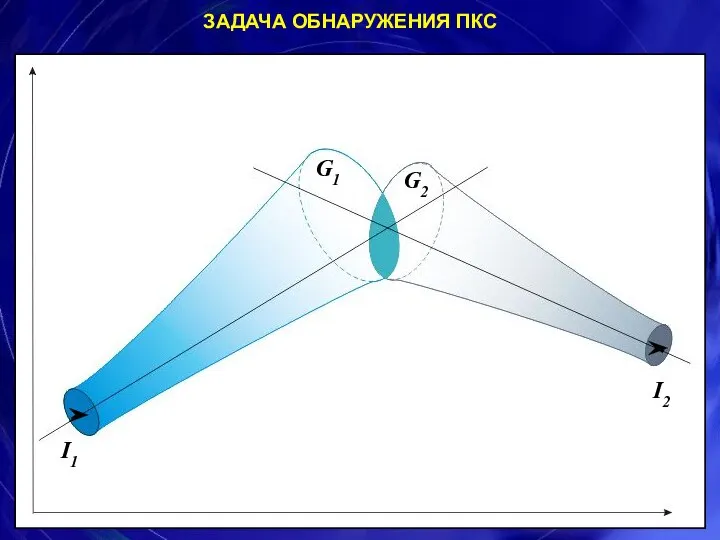
ЗАДАЧА ОБНАРУЖЕНИЯ ПКС
I1
I2
ЗАДАЧА ОБНАРУЖЕНИЯ ПКС
I1
I2
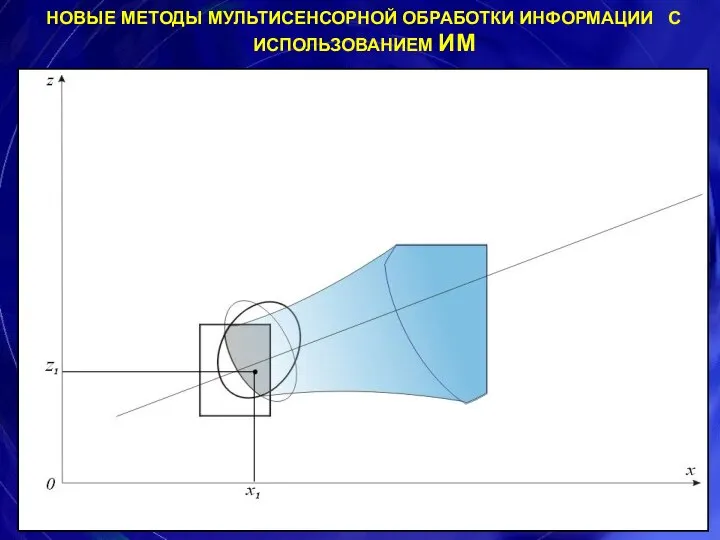
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
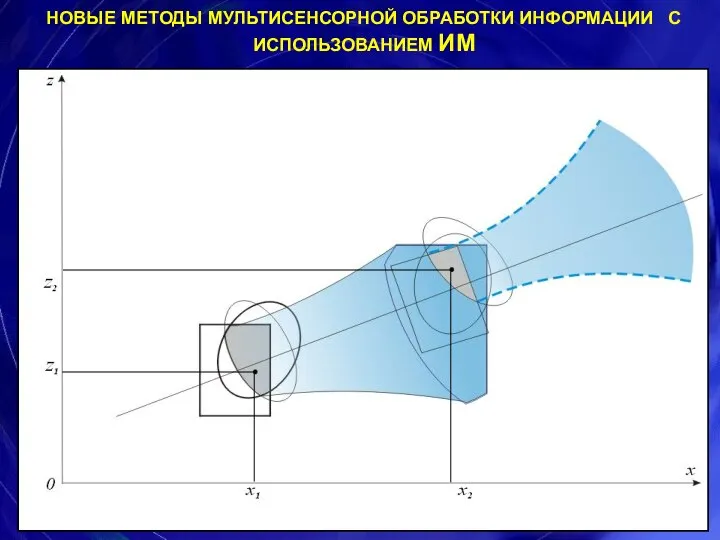
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
НОВЫЕ МЕТОДЫ МУЛЬТИСЕНСОРНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ИМ
 Міжнародні конфлікти
Міжнародні конфлікти Дополнительные устройства в микроконтроллере
Дополнительные устройства в микроконтроллере  Презентация по алгебре Решение уравнений,содержащих переменную под знаком модуля
Презентация по алгебре Решение уравнений,содержащих переменную под знаком модуля  Презентация Требования, предъявляемые к мировым ценам.
Презентация Требования, предъявляемые к мировым ценам. Презентация "Управление финансовой деятельностью фитнес-клуба" - скачать презентации по Экономике
Презентация "Управление финансовой деятельностью фитнес-клуба" - скачать презентации по Экономике Достопримечательности г. Воткинска
Достопримечательности г. Воткинска Причины коррупции в сфере государственной службы
Причины коррупции в сфере государственной службы Презентация Понятие и назначение уголовного процесса.
Презентация Понятие и назначение уголовного процесса. Лекция 4. Генетика бактерий
Лекция 4. Генетика бактерий Бизнес план как базовый документ Стартапа Бизнес модель. Основные блоки
Бизнес план как базовый документ Стартапа Бизнес модель. Основные блоки  Урок математики в 1 классе по теме «Число 0. Его получение и обозначение» Составила: учитель начальных классов, МОУ СОШ м-на Вы
Урок математики в 1 классе по теме «Число 0. Его получение и обозначение» Составила: учитель начальных классов, МОУ СОШ м-на Вы Возрождение народного декоративно- прикладного искусства. Орнамент.
Возрождение народного декоративно- прикладного искусства. Орнамент. производство стеклотары
производство стеклотары  Профессионально – прикладная физическая культура
Профессионально – прикладная физическая культура Сущность и задачи финансового менеджмента
Сущность и задачи финансового менеджмента  Основы электричества и электротехники. Часть I
Основы электричества и электротехники. Часть I Презентация опыта работы учителя начальных классов МОУ СОШ № 6 п. Каскадный Андроповского района Ставропольского края по теме: «И
Презентация опыта работы учителя начальных классов МОУ СОШ № 6 п. Каскадный Андроповского района Ставропольского края по теме: «И СЕРТИФИКАЦИЯ И СИСТЕМЫ АККРЕДИТАЦИИ
СЕРТИФИКАЦИЯ И СИСТЕМЫ АККРЕДИТАЦИИ  Статистика таможенных правонарушений Выполнил: студентка 4 го курса ФТД группа Т-083 Бреус Я.Ю
Статистика таможенных правонарушений Выполнил: студентка 4 го курса ФТД группа Т-083 Бреус Я.Ю  Семь чудес Усть - Усы Семяшкина Александра Григорьевна - учитель технологии МОУ «СОШ» с.Усть-Уса
Семь чудес Усть - Усы Семяшкина Александра Григорьевна - учитель технологии МОУ «СОШ» с.Усть-Уса Белая рубашка
Белая рубашка Ситуация социализации как дидактическая единица обучения и воспитания Кочнева М.М. руководитель проблемной группы МОУ «СОШ №12»
Ситуация социализации как дидактическая единица обучения и воспитания Кочнева М.М. руководитель проблемной группы МОУ «СОШ №12» Презентация Служебное время и должностной регламент сотрудников таможенных органов
Презентация Служебное время и должностной регламент сотрудников таможенных органов Государственный долг внешний и внутренний Бурсаковский Сергей Т093
Государственный долг внешний и внутренний Бурсаковский Сергей Т093  Методы верификации прогнозных моделей
Методы верификации прогнозных моделей Nike компаниясы
Nike компаниясы Правила БПФ. Роли спикеров. Типы тем
Правила БПФ. Роли спикеров. Типы тем Язык программирования C#
Язык программирования C#