- Алгоритмы управления и аддаптации в ТКС

Содержание
- 2. Задачи сетевого управления При решении задачи сетевого управления стремятся получать максимально полезный результат, как по точности
- 3. При синтезе оптимального управления необходимо: знать законы распределения вероятностей и необходимые статистические характеристики случайных возмущений, что
- 4. Стохастическая система dx/dt=A(t)x(t) + Вu(t)+C(t)ξ(t) Вu(t) – управление системой C(t)ξ(t) – гауссовый белый шум Автономная система
- 5. Методы формирования управления в динамических системах Оценка качества управления системы Теорема о разделении для управляемых систем.
- 6. Анализ состояния управляемых систем. Инерционность системы определяется А и зависит от параметров системы и условиями: локальная
- 7. Теорема о разделении для управляемых систем. В стохастических системах оптимальное управление может быть построено с помощью
- 8. Оценка качества управления системы Оценка зависит от целевой установки системы. Система связи направленная на предоставления обслуживания
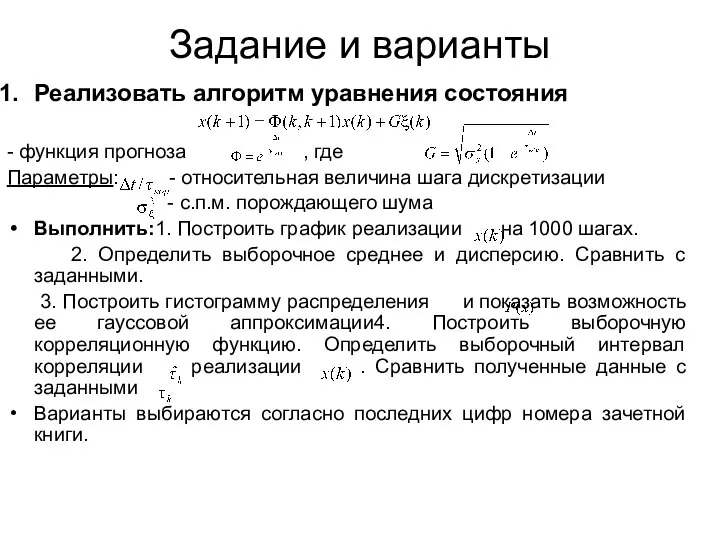
- 9. Задание и варианты Реализовать алгоритм уравнения состояния - функция прогноза , где Параметры: - относительная величина
- 10. Задание №2 Выполнить: Построить график оценки на 1000 шагах. Определить наличие свойств устойчивости процедуры. Определить интервал,
- 11. Программа Matlaba clear all; clc; N=1000; t1=1:N; D=10; T=1; T0=1000; % shag diskretizatii v=randn(size(t1)); w=randn(size(t1)); m=ones(size(t1));
- 12. Построить график реализации Определить выборочное среднее и дисперсию: M = 0.0068, D = 0.9605 Гистограмму распределения
- 14. Скачать презентацию
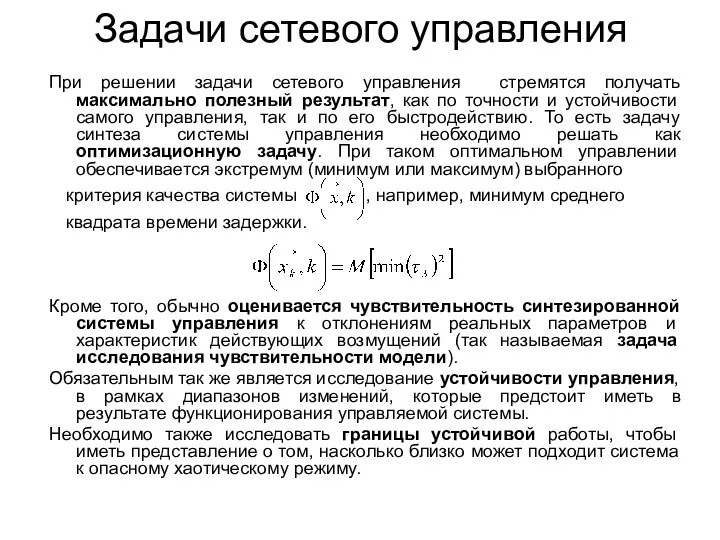
Задачи сетевого управления
При решении задачи сетевого управления стремятся получать максимально полезный
Задачи сетевого управления
При решении задачи сетевого управления стремятся получать максимально полезный
При синтезе оптимального управления необходимо:
знать законы распределения вероятностей и необходимые статистические
При синтезе оптимального управления необходимо:
знать законы распределения вероятностей и необходимые статистические
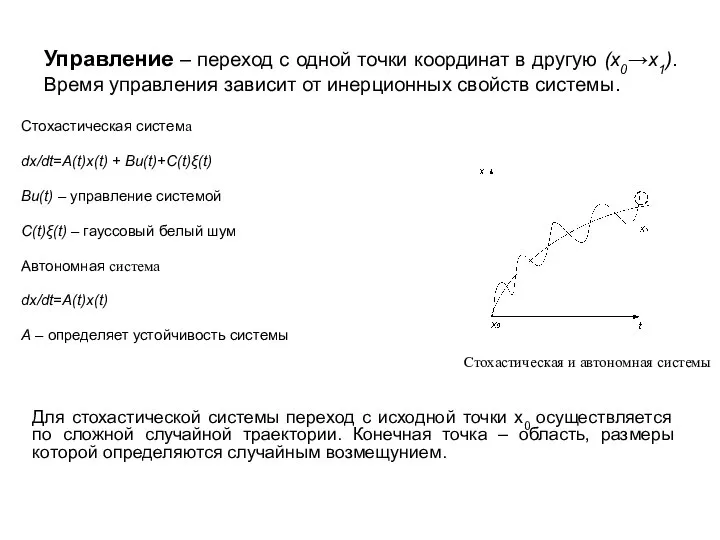
Стохастическая система
dx/dt=A(t)x(t) + Вu(t)+C(t)ξ(t)
Вu(t) – управление системой
C(t)ξ(t) – гауссовый белый шум
Стохастическая система
dx/dt=A(t)x(t) + Вu(t)+C(t)ξ(t)
Вu(t) – управление системой
C(t)ξ(t) – гауссовый белый шум
Методы формирования управления в динамических системах
Оценка качества управления системы
Теорема о разделении
Методы формирования управления в динамических системах
Оценка качества управления системы
Теорема о разделении
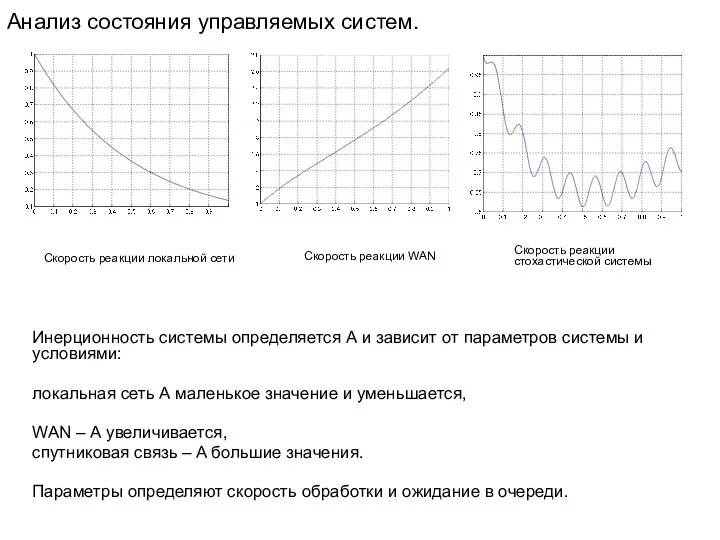
Анализ состояния управляемых систем.
Инерционность системы определяется А и зависит от параметров
Анализ состояния управляемых систем.
Инерционность системы определяется А и зависит от параметров
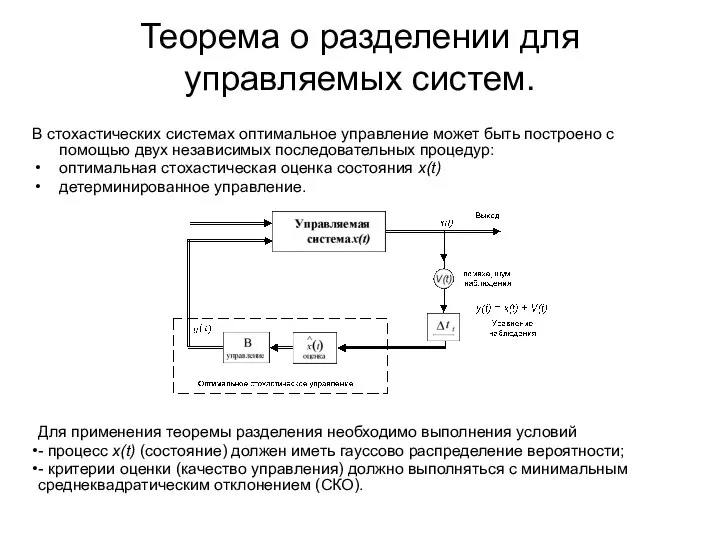
Теорема о разделении для управляемых систем.
В стохастических системах оптимальное управление может
Теорема о разделении для управляемых систем.
В стохастических системах оптимальное управление может
Оценка качества управления системы
Оценка зависит от целевой установки системы. Система связи
Оценка качества управления системы
Оценка зависит от целевой установки системы. Система связи
Задание и варианты
Реализовать алгоритм уравнения состояния
- функция прогноза , где
Параметры:
Задание и варианты
Реализовать алгоритм уравнения состояния
- функция прогноза , где
Параметры:
Задание №2
Выполнить:
Построить график оценки на 1000 шагах.
Определить наличие свойств устойчивости процедуры.
Определить
Задание №2
Выполнить:
Построить график оценки на 1000 шагах.
Определить наличие свойств устойчивости процедуры.
Определить
Программа Matlaba
clear all; clc;
N=1000;
t1=1:N;
D=10;
T=1;
T0=1000; % shag
Программа Matlaba
clear all; clc;
N=1000;
t1=1:N;
D=10;
T=1;
T0=1000; % shag
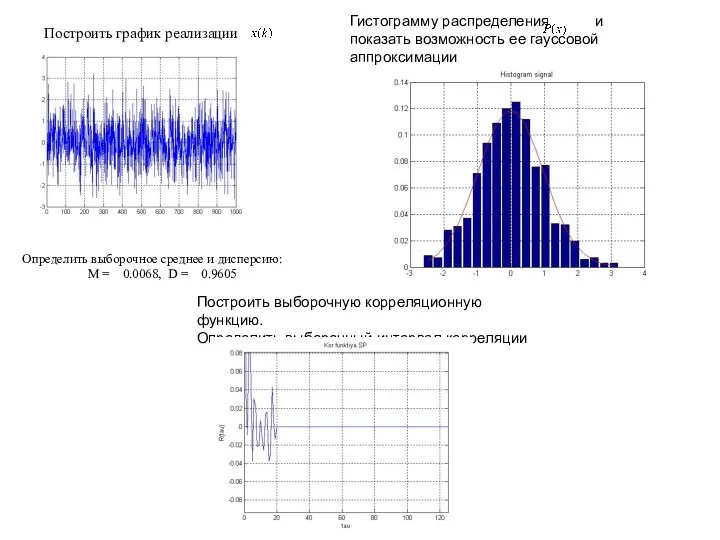
Построить график реализации
Определить выборочное среднее и дисперсию:
M =
Построить график реализации
Определить выборочное среднее и дисперсию:
M =
 Ілияс Есенберлин “ Қаһар” романы тіліндегі кездесетін диалектілік ерекшеліктер
Ілияс Есенберлин “ Қаһар” романы тіліндегі кездесетін диалектілік ерекшеліктер Easter egg hunt!
Easter egg hunt! Латинский язык Имя прилагательное. Словарная форма
Латинский язык Имя прилагательное. Словарная форма Бизнес – проект по развитию садоводства
Бизнес – проект по развитию садоводства Субъекты процедур банкротства
Субъекты процедур банкротства Власть. Структурная и ситуационная власть
Власть. Структурная и ситуационная власть Мировая художественная культура
Мировая художественная культура Регистры. Определение, применение, состав, виды
Регистры. Определение, применение, состав, виды СТРАТЕГИЧЕСКИЙ ПРОЕКТ «ГОСТИНИЦЫ ЕКАТЕРИНБУРГА» Докладчик – Председатель Комитета по организации бытового обслуживания на
СТРАТЕГИЧЕСКИЙ ПРОЕКТ «ГОСТИНИЦЫ ЕКАТЕРИНБУРГА» Докладчик – Председатель Комитета по организации бытового обслуживания на Архитектура Древней Руси
Архитектура Древней Руси Зимушка -зима
Зимушка -зима 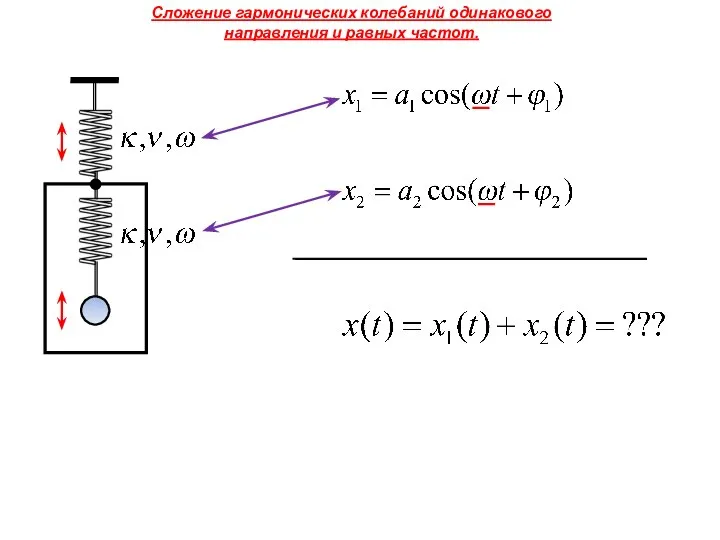 Сложение гармонических колебаний
Сложение гармонических колебаний  Розробка Android-додатку “PDF читач”
Розробка Android-додатку “PDF читач” Складирование конструкций
Складирование конструкций Презентация на тему "Ключевые компетенции учителя" - скачать презентации по Педагогике
Презентация на тему "Ключевые компетенции учителя" - скачать презентации по Педагогике Баскетбольный турнир в детском саду "Оранжевый мяч"
Баскетбольный турнир в детском саду "Оранжевый мяч" Основы триботехники. Лекция 1
Основы триботехники. Лекция 1 Изобразительное искусство – средство познания себя и мира Картавцева О.Д.- к.п.н., доцент кафедры изобразительного искусства
Изобразительное искусство – средство познания себя и мира Картавцева О.Д.- к.п.н., доцент кафедры изобразительного искусства Модели деловой карьеры менеджера
Модели деловой карьеры менеджера Калькуляция себестоимости с полным распределением затрат и по переменным издержкам
Калькуляция себестоимости с полным распределением затрат и по переменным издержкам Предмет і методи політології. Політика як соціальне явище
Предмет і методи політології. Політика як соціальне явище Изменения в нормативной базе для НФО (4937-У, 5075-У, 5084-У, 32-ФЗ)
Изменения в нормативной базе для НФО (4937-У, 5075-У, 5084-У, 32-ФЗ) Проектирование и оптимизация качества буровых растворов
Проектирование и оптимизация качества буровых растворов Презентация "Украшения" - скачать презентации по МХК
Презентация "Украшения" - скачать презентации по МХК St. Valentine’s Day
St. Valentine’s Day Турклуб "Сокол"
Турклуб "Сокол" Наурыз құтты болсын
Наурыз құтты болсын «Мировое хозяйство и международная торговля.»
«Мировое хозяйство и международная торговля.»