- Анализ работы импульсного регулятора сопротивления

Содержание
- 2. Диаграмма работы коммутатора
- 3. Среднее значение выпрямленного тока ротора Idp, которое определяет момент двигателя при данном скольжении, зависит от скважности
- 4. Принципиальная схема силовой части асинхронного электропривода
- 5. Среднее значение импульсного регулируемого сопротивления Rd линейно зависит от скважности Rd=Rдоб ⋅(1- ε) Idp=Edo⋅S/(Rэ+Rd) отсюда Rэ=(S⋅m⋅Xд/2⋅π)+2⋅Rд
- 7. Диаграммы напряжений отражающие работу схемы показаны ниже
- 8. Регулировочная характеристика коммутатора имеет вид, Коэффициент передачи звена может быть подсчитан по выражению Если учесть дискретность
- 9. Анализ статических характеристик замкнутой системы регулирования скорости. Вариант замкнутой системы регулирования скорости с суммирующим усилителем приведён
- 11. на вход усилителя А2, формирующего сигнал обратной связи по скорости, в соответствии с уравнением подаются три
- 12. Ке⋅ Uе = Кс⋅ ωо; Кн= Кс⋅ (ωо/Edo); КТ = Кс⋅ (ωо/Edo)⋅ Rэ Для анализа работы
- 13. Синтез параметров системы автоматического регулирования в режиме стабилизации скорости можно осуществить, используя графоаналитический метод расчёта
- 14. Ку (Кзс⋅Uзс – Кос⋅Кс⋅ωа)= 0; Ку (Кзс⋅Uзс – Кос⋅Кс ωd )= ε2 Вычитая из 2 1
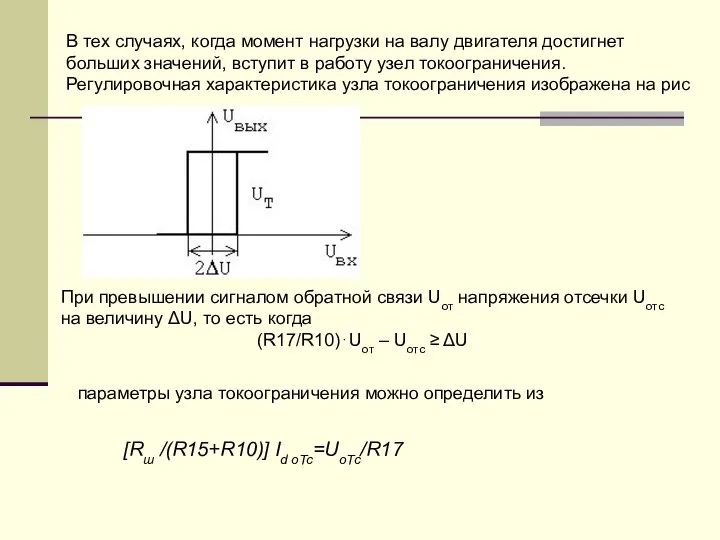
- 15. В тех случаях, когда момент нагрузки на валу двигателя достигнет больших значений, вступит в работу узел
- 16. Динамические характеристики системы с импульсным регулятором дифференциальные уравнения, записанные для каждого узла системы. КА1 (Uзс –
- 17. Составить структурную схему по этим уравнениям невозможно из-за наличия нескольких нелинейностей, обусловленных зависимостью эквивалентного сопротивления ротора
- 19. Скачать презентацию
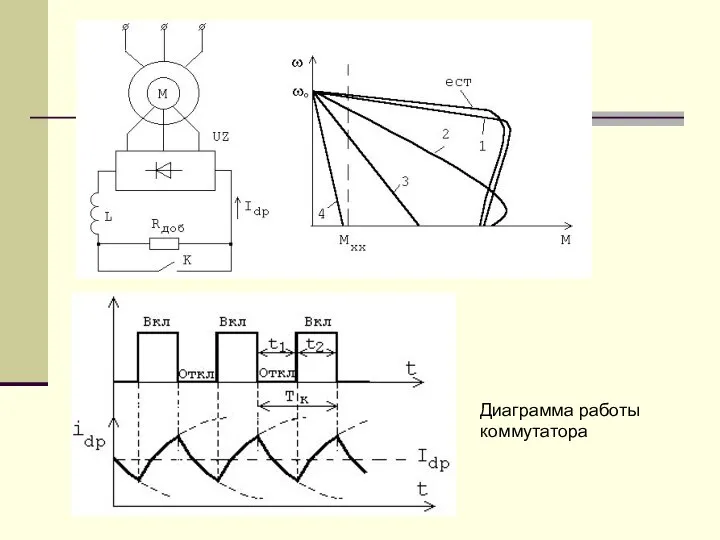
Диаграмма работы коммутатора
Диаграмма работы коммутатора
Среднее значение выпрямленного тока ротора Idp, которое определяет момент двигателя при
Среднее значение выпрямленного тока ротора Idp, которое определяет момент двигателя при
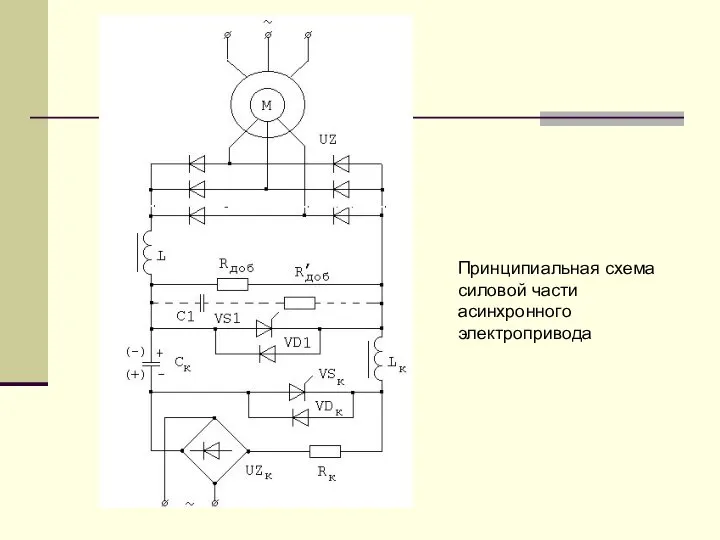
Принципиальная схема силовой части асинхронного электропривода
Принципиальная схема силовой части асинхронного электропривода

Среднее значение импульсного регулируемого сопротивления Rd линейно зависит от скважности
Rd=Rдоб
Среднее значение импульсного регулируемого сопротивления Rd линейно зависит от скважности
Rd=Rдоб

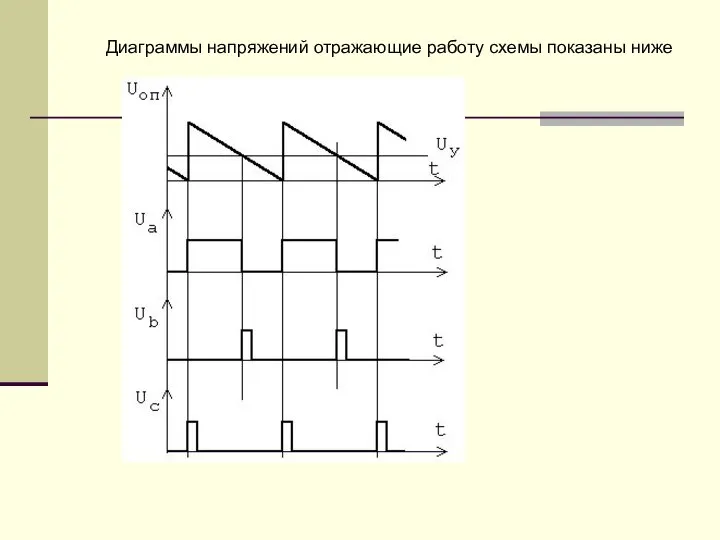
Диаграммы напряжений отражающие работу схемы показаны ниже
Диаграммы напряжений отражающие работу схемы показаны ниже

Регулировочная характеристика коммутатора имеет вид,
Коэффициент передачи звена может быть подсчитан
Регулировочная характеристика коммутатора имеет вид,
Коэффициент передачи звена может быть подсчитан
Анализ статических характеристик замкнутой системы регулирования скорости.
Вариант замкнутой системы регулирования скорости
Анализ статических характеристик замкнутой системы регулирования скорости.
Вариант замкнутой системы регулирования скорости

на вход усилителя А2, формирующего сигнал обратной связи по скорости, в
на вход усилителя А2, формирующего сигнал обратной связи по скорости, в
Ке⋅ Uе = Кс⋅ ωо; Кн= Кс⋅ (ωо/Edo); КТ = Кс⋅ (ωо/Edo)⋅ Rэ
Ке⋅ Uе = Кс⋅ ωо; Кн= Кс⋅ (ωо/Edo); КТ = Кс⋅ (ωо/Edo)⋅ Rэ

Синтез параметров системы автоматического регулирования в режиме стабилизации скорости можно осуществить,
Синтез параметров системы автоматического регулирования в режиме стабилизации скорости можно осуществить,

Ку (Кзс⋅Uзс – Кос⋅Кс⋅ωа)= 0;
Ку (Кзс⋅Uзс – Кос⋅Кс ωd )=
Ку (Кзс⋅Uзс – Кос⋅Кс⋅ωа)= 0;
Ку (Кзс⋅Uзс – Кос⋅Кс ωd )=
В тех случаях, когда момент нагрузки на валу двигателя достигнет больших
В тех случаях, когда момент нагрузки на валу двигателя достигнет больших
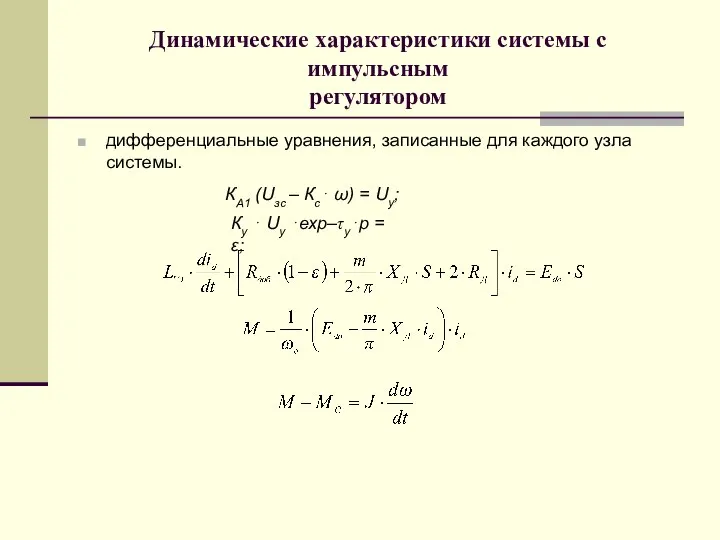
Динамические характеристики системы с импульсным
регулятором
дифференциальные уравнения, записанные для каждого узла
Динамические характеристики системы с импульсным
регулятором
дифференциальные уравнения, записанные для каждого узла
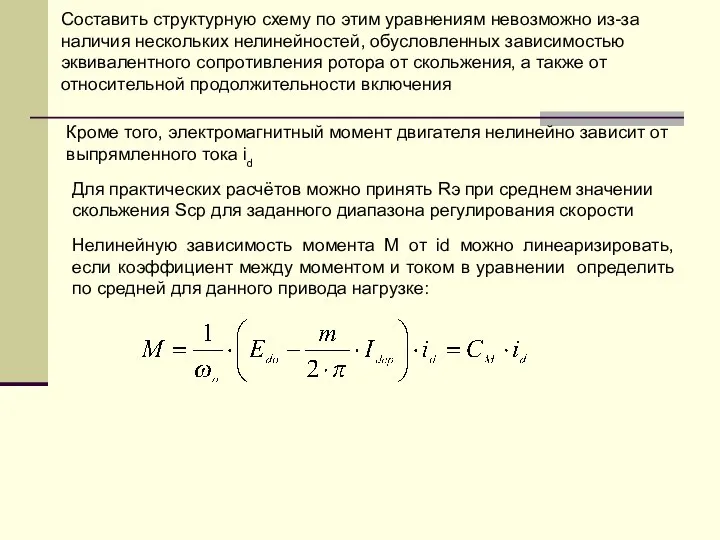
Составить структурную схему по этим уравнениям невозможно из-за наличия нескольких нелинейностей,
Составить структурную схему по этим уравнениям невозможно из-за наличия нескольких нелинейностей,
 Генеральная Ассамблея ООН Подготовила: студентка Группы Ю092 Виноградская Екатерина
Генеральная Ассамблея ООН Подготовила: студентка Группы Ю092 Виноградская Екатерина Г.Песталоцци: педагогические идеи
Г.Песталоцци: педагогические идеи Футуризм и футуристы
Футуризм и футуристы Славянские имена –зеркало славянского народа
Славянские имена –зеркало славянского народа 7 занятие.ppt
7 занятие.ppt Сравнение скансенов
Сравнение скансенов Основные виды и принципы природопользования Выполнили: студентки 3 курса юридического факультета, группа ю-092 Ганеева М., Виноград
Основные виды и принципы природопользования Выполнили: студентки 3 курса юридического факультета, группа ю-092 Ганеева М., Виноград Логические величины, операции, выражения
Логические величины, операции, выражения Вторичный сектор Отрасли промышленности
Вторичный сектор Отрасли промышленности Модификация алгоритма Viola-Jones на основе детектирования цвета кожи
Модификация алгоритма Viola-Jones на основе детектирования цвета кожи Организация подземного пространства зданий и сооружений
Организация подземного пространства зданий и сооружений Линейная функция
Линейная функция  Биполярные транзисторы
Биполярные транзисторы ПРЕСТУПЛЕНИЯ В СФЕРЕ ОБОРОТА НАРКОТИЧЕСКИХ СРЕДСТВ
ПРЕСТУПЛЕНИЯ В СФЕРЕ ОБОРОТА НАРКОТИЧЕСКИХ СРЕДСТВ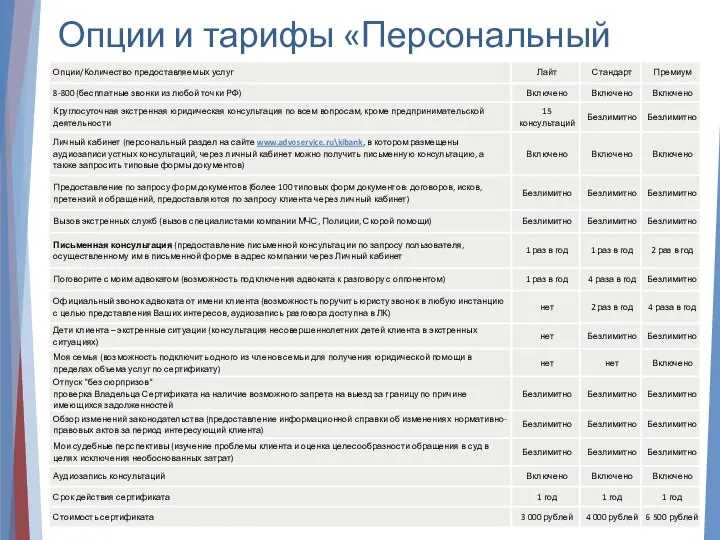 Опции и тарифы «Персональный юрист»
Опции и тарифы «Персональный юрист» Возникновение и развитие египтологии
Возникновение и развитие египтологии  Презентация "Гоголь и театр" - скачать презентации по МХК
Презентация "Гоголь и театр" - скачать презентации по МХК Ключевые события
Ключевые события Трудовое право
Трудовое право Динамика развития современной электроники
Динамика развития современной электроники Ферродинамические приборы
Ферродинамические приборы Пантеон - храм всех богов
Пантеон - храм всех богов Потребность в сне и отдыхе Презентация по дисциплине: «Основы Сестринского Дела» Автор: Филатова А.С. Практическое занятие
Потребность в сне и отдыхе Презентация по дисциплине: «Основы Сестринского Дела» Автор: Филатова А.С. Практическое занятие Sensors. Angular sensor – Resolver sensor
Sensors. Angular sensor – Resolver sensor Müssen
Müssen Телевидение - пространство культуры. Мир на экране
Телевидение - пространство культуры. Мир на экране Правила проведения Миссионерских вестей
Правила проведения Миссионерских вестей Иррациональные уравнения Урок алгебры и начал анализа 11 класс
Иррациональные уравнения Урок алгебры и начал анализа 11 класс