- Понятия векторного управления

Содержание
- 2. Определение Векторное управление частотно-регулируемого асинхронного электропривода связано как с изменением частоты и текущих значений переменных АД,
- 3. Формирование момента АД возможно воздействием на абсолютные значения векторов потокосцеплений токов и фазовых сдвигов между ними
- 4. Анализ рис. позволяет интерпретировать АД как эквивалентную машину постоянного тока. Если ротор АД сопоставить якорю двигателя
- 5. вектор может быть определен по его составляющим Ψμα и Ψμβ Непосредственное измерение каждой из составляющих может
- 6. В систему координат x, y проекции векторов тока I1α и I1β пересчитываются как Таким образом, система
- 7. векторная диаграмма при ориентации по оси x системы координат х, y I'2х = 0; I'2у =
- 8. Так как электромагнитный момент АД определяется взаимодействием ортогональных составляющих потокосцепления ротора Ψ2 = Ψ2х = L12
- 9. При неподвижном роторе (f1=0, αω0н=0) и отсутствии статической нагрузки вектор будет неподвижным в пространстве, а ток
- 10. Особенностью систем управления с опорным вектором потокосцепления Ψ2 является более простая, чем с опорным вектором Ψμ
- 11. Структурная схема АД при управлении по вектору потокосцепления ротора Динамические свойства короткозамкнутого АД при питании от
- 12. Тогда где к2 = L12/ L’2 – коэффициент электромагнитной связи ротора – коэффициент рассеяния магнитного поля
- 13. С учетом уравнений для цепи ротора уравнения для статора примут вид: Если представить в осях х,у
- 14. определяет падение напряжения в роторной цепи АД, выражения и характеризуют ЭДС самоиндукции или падение напряжения на
- 15. Т1э = σL1/R1э Для цепи ротора уравнения в операторной форме будут иметь вид Т2 = L’2/
- 16. Суммируясь с рпω, этот сигнал формирует синхронную скорость ω0эл.
- 17. Система управления с прямой ориентацией по вектору потокосцепления ротора АД
- 18. Система осуществляет независимое регулирование модуля вектора потокосцепления ротора и скорости ротора при сохранении прямой пропорциональности между
- 19. Кроме того, в ДП осуществляется вычисление составляющих потокосцепления ротора Ψ2α = Ψμ α - (L’2 -L12)
- 20. Тогда составляющая тока I1x определяет магнитный поток двигателя, что по аналогии с двигателем постоянного тока сравнимо
- 21. U1a = U1α , U1b = ( - U1α + U 1β ), ( - U1α
- 23. Структурная схема подобна структурной схеме системы двухзонного регулирования скорости двигателя постоянного тока. Поэтому при настройке контуров
- 24. Системы управления с косвенной ориентацией по вектору потокосцепления ротора АД Характерной особенностью систем управления с косвенной
- 27. Подобная комбинированная система задания момента (по возмущению и отклонению) применяется в основном для электроприводов, где требуются
- 28. Для постоянства задания электромагнитного момента при изменении потокосцепления ротора используется блок деления Для коррекции по динамической
- 29. Сигнал задания потокосцепления ротора ψ2з формируется в блоке А5. Функциональная связь между реальной частотой f1 выходного
- 30. В блоке А6 по математической модели АД определяется сигнал задания составляющей тока статора I1x В блоке
- 31. В блоке ЭМФ , на вход которого кроме текущих значений I1у ist и I1x ist составляющих
- 34. Исключение тахогенератора как элемента, требующего дополнительной, точной и надежной его установки на валу АД, реализуется в
- 36. Ряд технологических объектов (натяжные, намоточно-размоточные механизмы и т.п.) требуют регулирования и стабилизации момента на валу двигателя
- 39. Скачать презентацию

Определение
Векторное управление частотно-регулируемого асинхронного электропривода связано как с изменением частоты и
Определение
Векторное управление частотно-регулируемого асинхронного электропривода связано как с изменением частоты и

Формирование момента АД возможно воздействием на абсолютные значения векторов потокосцеплений
токов
Формирование момента АД возможно воздействием на абсолютные значения векторов потокосцеплений
токов

Анализ рис. позволяет интерпретировать АД как эквивалентную машину постоянного тока. Если
Анализ рис. позволяет интерпретировать АД как эквивалентную машину постоянного тока. Если
вектор
может быть определен по его составляющим Ψμα и Ψμβ
вектор
может быть определен по его составляющим Ψμα и Ψμβ

В систему координат x, y проекции векторов тока I1α и I1β
В систему координат x, y проекции векторов тока I1α и I1β

векторная диаграмма при ориентации
по оси x системы координат х,
векторная диаграмма при ориентации
по оси x системы координат х,

Так как электромагнитный момент АД определяется взаимодействием ортогональных составляющих потокосцепления ротора
Так как электромагнитный момент АД определяется взаимодействием ортогональных составляющих потокосцепления ротора
При неподвижном роторе (f1=0, αω0н=0) и отсутствии статической нагрузки вектор
При неподвижном роторе (f1=0, αω0н=0) и отсутствии статической нагрузки вектор
Особенностью систем управления с опорным вектором потокосцепления Ψ2 является более простая,
Особенностью систем управления с опорным вектором потокосцепления Ψ2 является более простая,
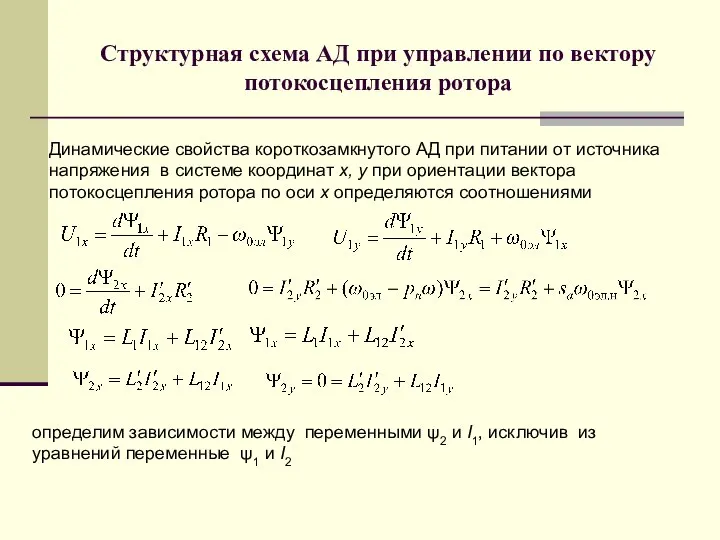
Структурная схема АД при управлении по вектору потокосцепления ротора
Динамические свойства короткозамкнутого
Структурная схема АД при управлении по вектору потокосцепления ротора
Динамические свойства короткозамкнутого
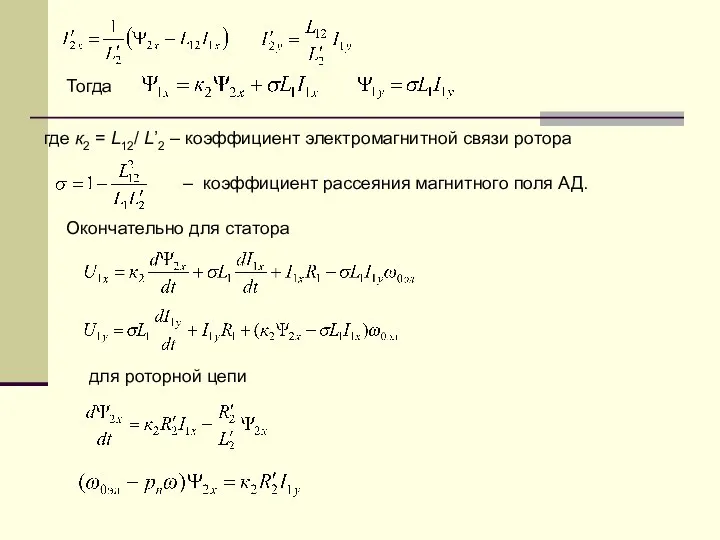
Тогда
где к2 = L12/ L’2 – коэффициент электромагнитной связи ротора
–
Тогда
где к2 = L12/ L’2 – коэффициент электромагнитной связи ротора
–
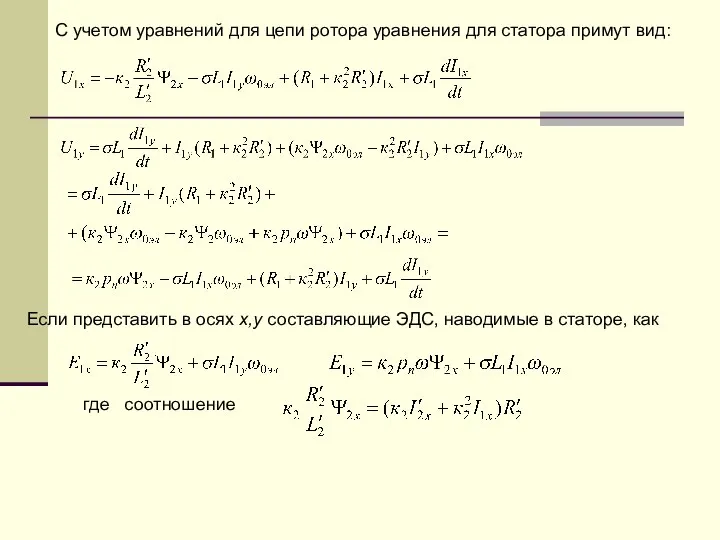
С учетом уравнений для цепи ротора уравнения для статора примут вид:
С учетом уравнений для цепи ротора уравнения для статора примут вид:
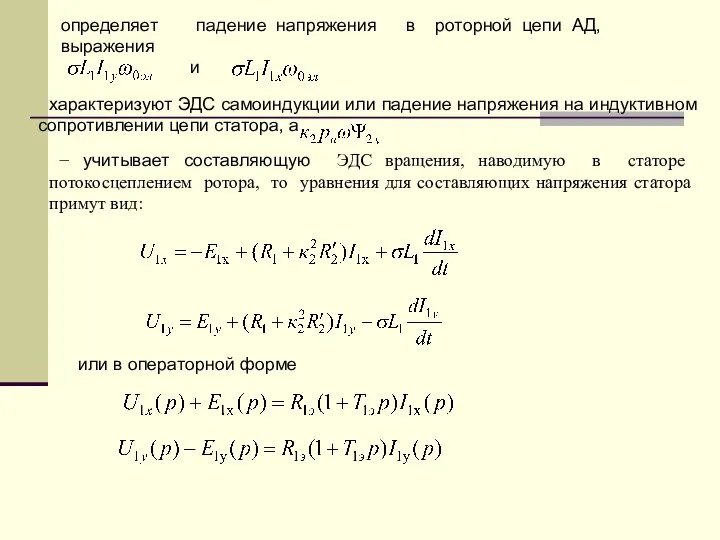
определяет падение напряжения в роторной цепи АД, выражения
и
определяет падение напряжения в роторной цепи АД, выражения
и

Т1э = σL1/R1э
Для цепи ротора уравнения в операторной форме будут
Т1э = σL1/R1э
Для цепи ротора уравнения в операторной форме будут

Суммируясь с рпω, этот сигнал формирует синхронную скорость ω0эл.
Суммируясь с рпω, этот сигнал формирует синхронную скорость ω0эл.

Система управления с прямой ориентацией по вектору потокосцепления ротора АД
Система управления с прямой ориентацией по вектору потокосцепления ротора АД
Система осуществляет независимое регулирование модуля вектора потокосцепления ротора и скорости ротора
Система осуществляет независимое регулирование модуля вектора потокосцепления ротора и скорости ротора
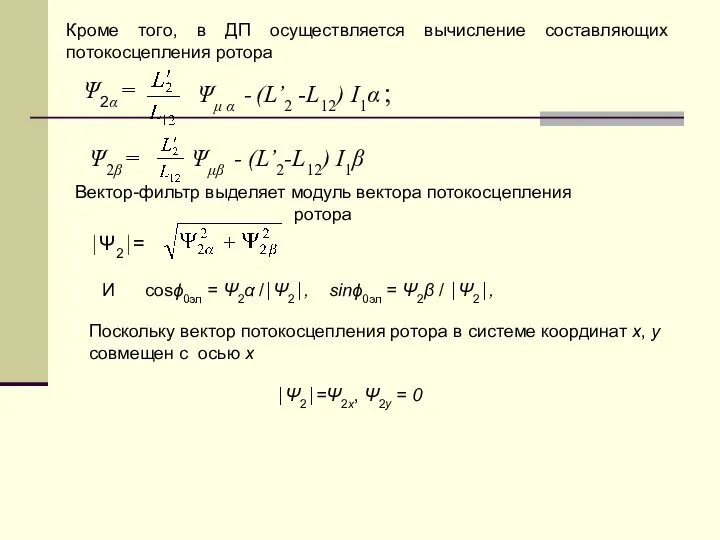
Кроме того, в ДП осуществляется вычисление составляющих потокосцепления ротора
Ψ2α =
Ψμ
Кроме того, в ДП осуществляется вычисление составляющих потокосцепления ротора
Ψ2α =
Ψμ

Тогда составляющая тока I1x определяет магнитный поток двигателя, что по аналогии
Тогда составляющая тока I1x определяет магнитный поток двигателя, что по аналогии

U1a =
U1α , U1b =
( -
U1α +
U1a =
U1α , U1b =
( -
U1α +


Структурная схема подобна структурной схеме системы двухзонного регулирования скорости двигателя постоянного
Структурная схема подобна структурной схеме системы двухзонного регулирования скорости двигателя постоянного
Системы управления с косвенной ориентацией по вектору потокосцепления ротора АД
Характерной особенностью
Системы управления с косвенной ориентацией по вектору потокосцепления ротора АД
Характерной особенностью



Подобная комбинированная система задания момента (по возмущению и отклонению) применяется в
Подобная комбинированная система задания момента (по возмущению и отклонению) применяется в

Для постоянства задания электромагнитного момента при изменении потокосцепления ротора используется блок
Для постоянства задания электромагнитного момента при изменении потокосцепления ротора используется блок

Сигнал задания потокосцепления ротора ψ2з формируется в блоке А5. Функциональная связь
Сигнал задания потокосцепления ротора ψ2з формируется в блоке А5. Функциональная связь
В блоке А6 по математической модели АД определяется сигнал задания составляющей
В блоке А6 по математической модели АД определяется сигнал задания составляющей

В блоке ЭМФ , на вход которого кроме текущих значений I1у
В блоке ЭМФ , на вход которого кроме текущих значений I1у


Исключение тахогенератора как элемента, требующего дополнительной, точной и надежной его установки
Исключение тахогенератора как элемента, требующего дополнительной, точной и надежной его установки


Ряд технологических объектов (натяжные, намоточно-размоточные механизмы и т.п.) требуют регулирования и
Ряд технологических объектов (натяжные, намоточно-размоточные механизмы и т.п.) требуют регулирования и

 Функция Суперпозиция Способы задания МНК
Функция Суперпозиция Способы задания МНК Донской след в русской культуре
Донской след в русской культуре Аналіз праці К. Юнга «Спроба психологічного тлумачення Догмата про Трійцю»
Аналіз праці К. Юнга «Спроба психологічного тлумачення Догмата про Трійцю» Общие правила нанесения размеров на чертежах
Общие правила нанесения размеров на чертежах Народная игрушка. Основные элементы росписи
Народная игрушка. Основные элементы росписи Викторина
Викторина Иерархия потребностей по Маслоу
Иерархия потребностей по Маслоу Серебряный век русской культуры
Серебряный век русской культуры X открытая региональная конференция-фестиваль творчества молодёжи и школьников «Наука. Творчество. Развитие» Тема: «Эндокрин
X открытая региональная конференция-фестиваль творчества молодёжи и школьников «Наука. Творчество. Развитие» Тема: «Эндокрин Глобализация в спорте, выступление российских спортсменов за разные страны и иностранцев за сборные России
Глобализация в спорте, выступление российских спортсменов за разные страны и иностранцев за сборные России Повторение условного оператора
Повторение условного оператора Планета знаний
Планета знаний Жаңа заман тудырған салт - дәстүрге сипаттама
Жаңа заман тудырған салт - дәстүрге сипаттама Античность Рим
Античность Рим Рекурсия. Метод решения задач
Рекурсия. Метод решения задач Олена Пчілка – мати Лесі Українки, дитяча письменниця
Олена Пчілка – мати Лесі Українки, дитяча письменниця Источники излучения в формном производстве
Источники излучения в формном производстве Натюрморт
Натюрморт Информационные технологии в правоохранительной деятельности. Методики идентификации оперативных фонограмм фото и видеоматериал
Информационные технологии в правоохранительной деятельности. Методики идентификации оперативных фонограмм фото и видеоматериал Социальная политика Японии
Социальная политика Японии  Навигация (часть 2)
Навигация (часть 2) Общероссийское движение «Готов к труду и обороне». (1-4 класс)
Общероссийское движение «Готов к труду и обороне». (1-4 класс) Яндекс.Директ: Новые возможности для новых условий рынка Николай Шестаков Москва, 26 марта 2009. - презентация
Яндекс.Директ: Новые возможности для новых условий рынка Николай Шестаков Москва, 26 марта 2009. - презентация Галамдық желі. Электрондық желі
Галамдық желі. Электрондық желі Выдающийся деятель XVII века: А.Л.Ордин-Нащокин Подготовила: Юрлова Виктория, МЭ-102
Выдающийся деятель XVII века: А.Л.Ордин-Нащокин Подготовила: Юрлова Виктория, МЭ-102 Факторы производства
Факторы производства  Презентация Понятие валютная котировка
Презентация Понятие валютная котировка  Камеральная налоговая проверка
Камеральная налоговая проверка