- СИСТЕМА ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ – АСИНХРОННЫЙ ДВИГАТЕЛЬ

Содержание
- 2. - преобразователи с непосредственной связью питающей сети и нагрузки ПЧНС (без модуляции и с широтно-импульсной модуляцией
- 3. Выходное напряжение АИН может регулироваться двумя способами: 1. при управляемом выпрямителе UZ1− изменением напряжения в звене
- 4. В ПЧ с АИН отсутствует рекуперация энергии в питающую сеть. В ПЧ с АИТ управляемый преобразователь
- 5. При переходе АД в генераторный режим изменяется направление его ЭДС и инвертор, который переходит в режим
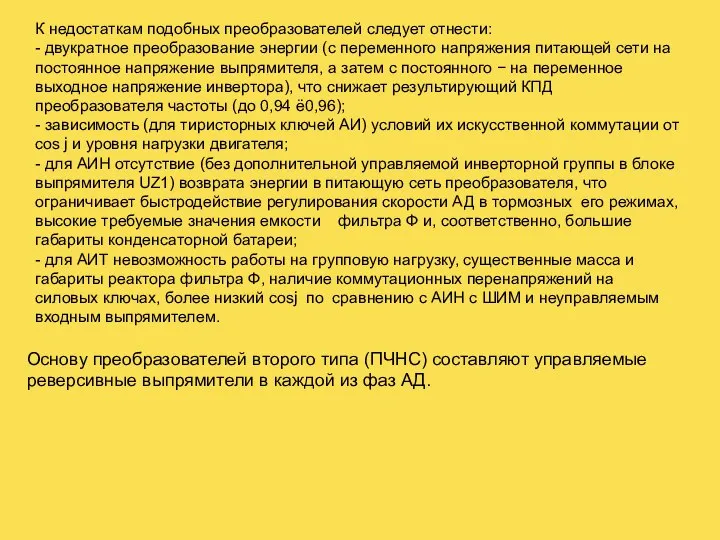
- 6. К недостаткам подобных преобразователей следует отнести: - двукратное преобразование энергии (с переменного напряжения питающей сети на
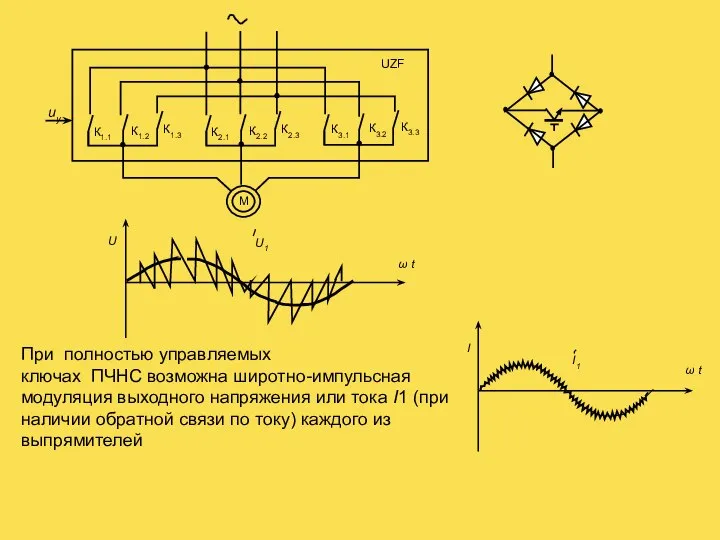
- 7. При полностью управляемых ключах ПЧНС возможна широтно-импульсная модуляция выходного напряжения или тока I1 (при наличии обратной
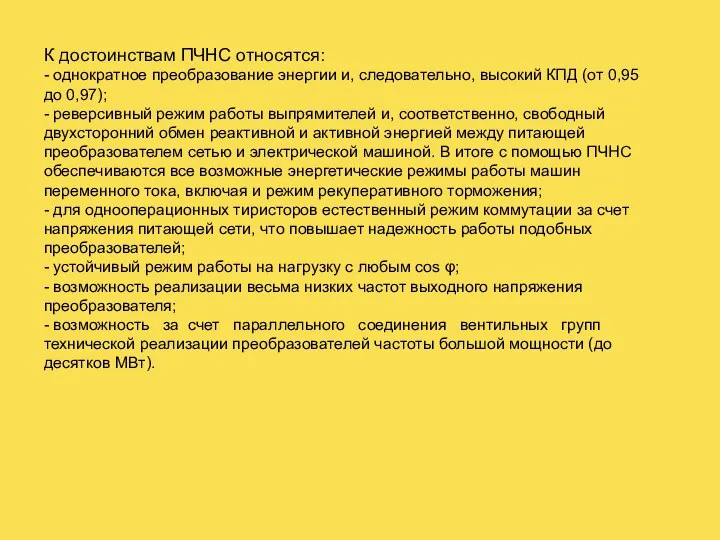
- 8. К достоинствам ПЧНС относятся: - однократное преобразование энергии и, следовательно, высокий КПД (от 0,95 до 0,97);
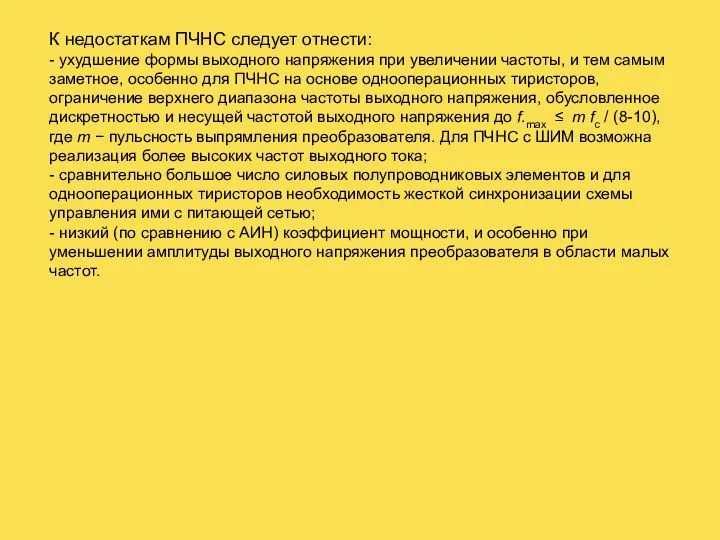
- 9. К недостаткам ПЧНС следует отнести: - ухудшение формы выходного напряжения при увеличении частоты, и тем самым
- 10. Технические характеристики преобразователей частоты и частотно-регулируемых электроприводов на их основе
- 11. Схемы замещения асинхронного двигателя при питании от источников напряжения и тока При питании от ПЧ, как
- 12. х1 =ω0н L1σ хμ = ω0н L12 s = (ω0н - ω)/ω0н
- 13. При питании от управляемого ПЧ, как источника трехфазного симметричного тока, схема замещения фазы АД в установившемся
- 14. Схемы замещения и векторные диаграммы отражают все основные процессы, происходящие в АД, и представляют собой основу
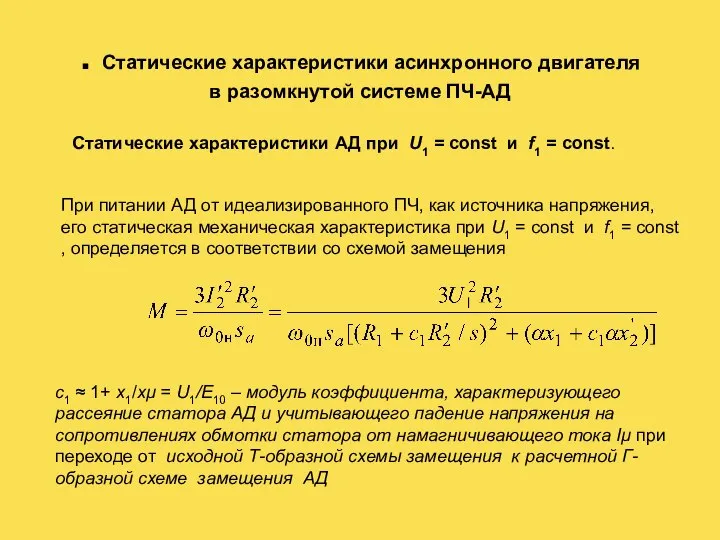
- 15. . Статические характеристики асинхронного двигателя в разомкнутой системе ПЧ-АД Статические характеристики АД при U1 = const
- 16. для общепромышленных АД с1 = 1,02 ÷ 1,08 Качественный вид механических характеристик АД при U1 =
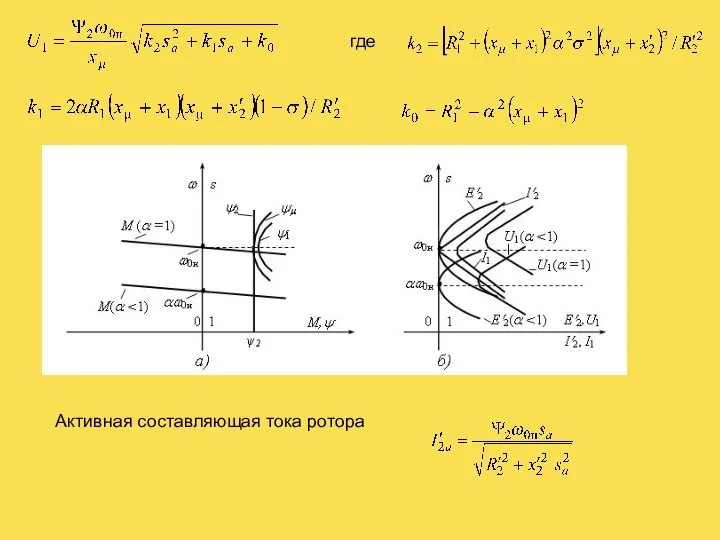
- 17. возникает в результате взаимодействия результирующего магнитного потока и активной составляющей тока ротора , При s →
- 18. Нелинейность кривой вызвана как нелинейностью так и изменением индуктивного сопротивления рассеяния ротора х'2 (s). Фμ (s),
- 19. При U1 = const частотное регулирование скорости АД находит применение лишь при α > 1 (f1
- 20. В результате уменьшения Фμ по мере снижения скорости уменьшается и максимальный электромагнитный момент АД Если при
- 21. то учитывая, что будет поддерживаться постоянным В соответствии со схемой замещения Для обеспечения Ψ2 = const
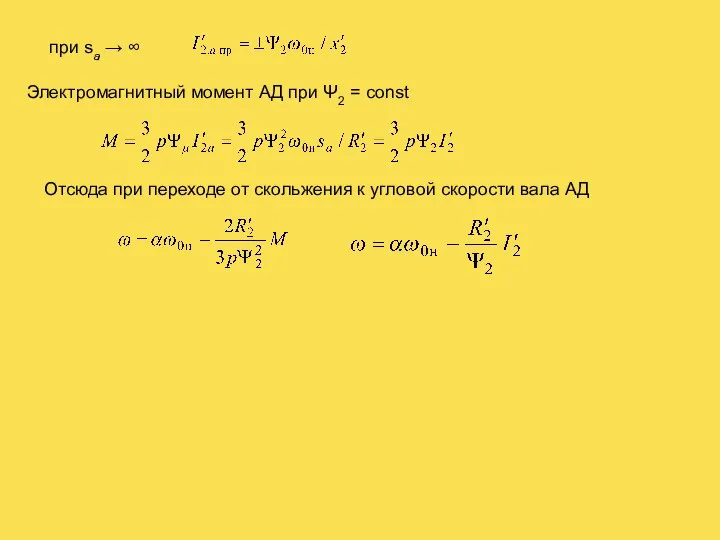
- 22. где Активная составляющая тока ротора
- 23. при sа → ∞ Электромагнитный момент АД при Ψ2 = const Отсюда при переходе от скольжения
- 24. Электромагнитная мощность и момент асинхронного двигателя Согласно теории обобщенной электрической машины, при вращении осей координат x,
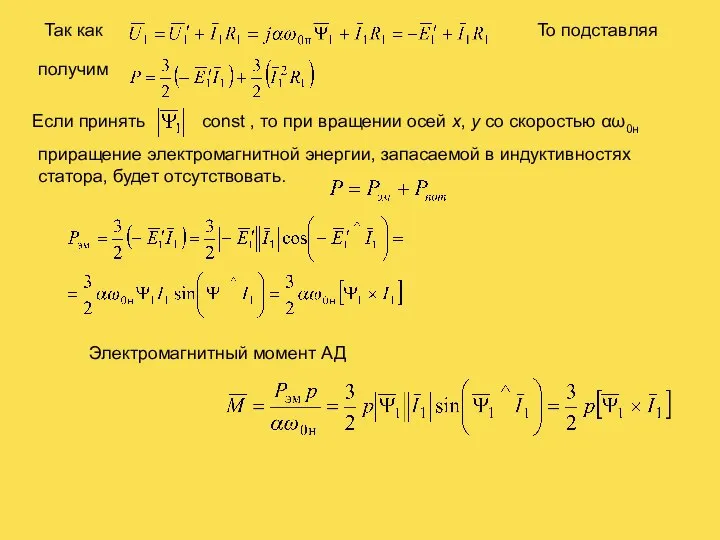
- 25. Так как То подставляя получим Если принять const , то при вращении осей x, y со
- 26. Из векторной диаграммы, ДВИГАТЕЛЯ следует где Тогда для АД можно дополнительно получить ряд соотношений Таким образом
- 27. Контрольные вопросы Перечислите достоинства и недостатки преобразователей частоты на основе автономных инверторов и с непосредственной связью.
- 29. Скачать презентацию
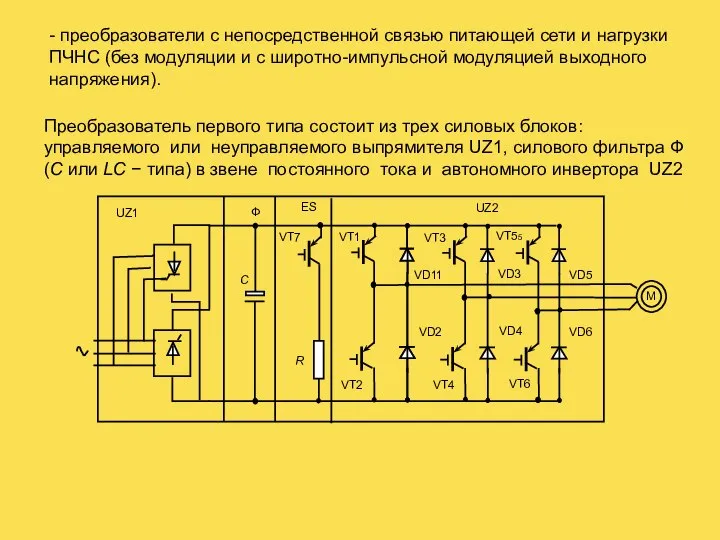
- преобразователи с непосредственной связью питающей сети и нагрузки ПЧНС (без
- преобразователи с непосредственной связью питающей сети и нагрузки ПЧНС (без
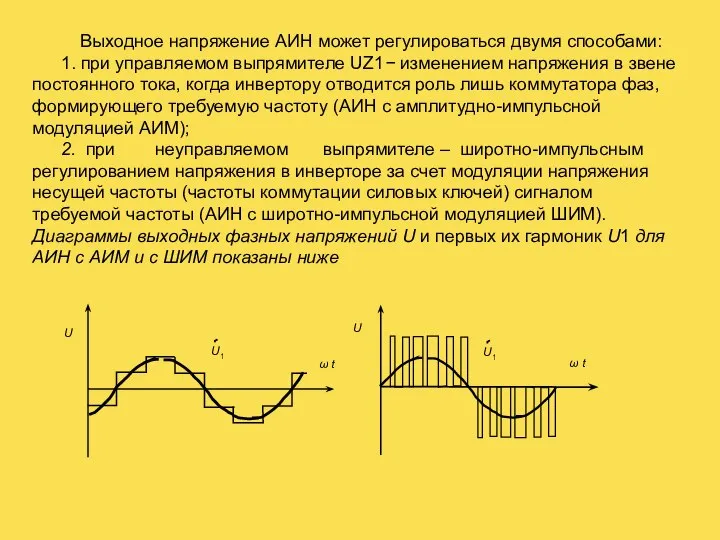
Выходное напряжение АИН может регулироваться двумя способами:
1. при управляемом выпрямителе
Выходное напряжение АИН может регулироваться двумя способами:
1. при управляемом выпрямителе
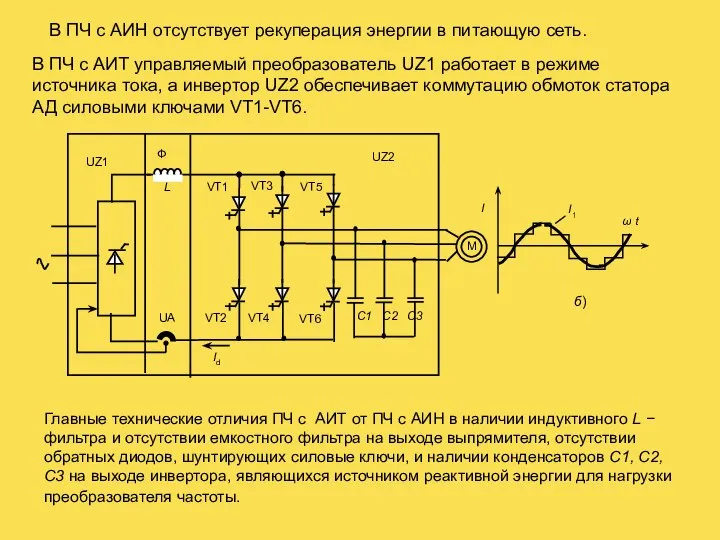
В ПЧ с АИН отсутствует рекуперация энергии в питающую сеть.
В
В ПЧ с АИН отсутствует рекуперация энергии в питающую сеть.
В
При переходе АД в генераторный режим изменяется направление его ЭДС и
При переходе АД в генераторный режим изменяется направление его ЭДС и
К недостаткам подобных преобразователей следует отнести:
- двукратное преобразование энергии (с
К недостаткам подобных преобразователей следует отнести:
- двукратное преобразование энергии (с
При полностью управляемых
ключах ПЧНС возможна широтно-импульсная модуляция выходного напряжения или
При полностью управляемых
ключах ПЧНС возможна широтно-импульсная модуляция выходного напряжения или
К достоинствам ПЧНС относятся:
- однократное преобразование энергии и, следовательно, высокий
К достоинствам ПЧНС относятся:
- однократное преобразование энергии и, следовательно, высокий
К недостаткам ПЧНС следует отнести:
- ухудшение формы выходного напряжения при
К недостаткам ПЧНС следует отнести:
- ухудшение формы выходного напряжения при
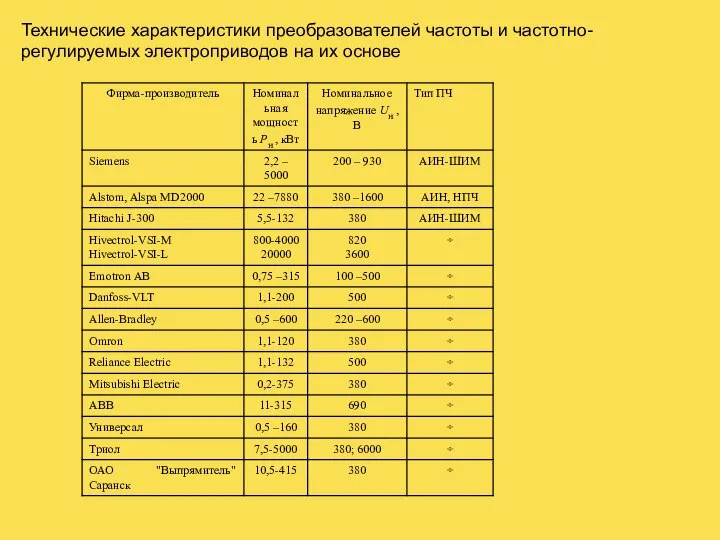
Технические характеристики преобразователей частоты и частотно-регулируемых электроприводов на их основе
Технические характеристики преобразователей частоты и частотно-регулируемых электроприводов на их основе
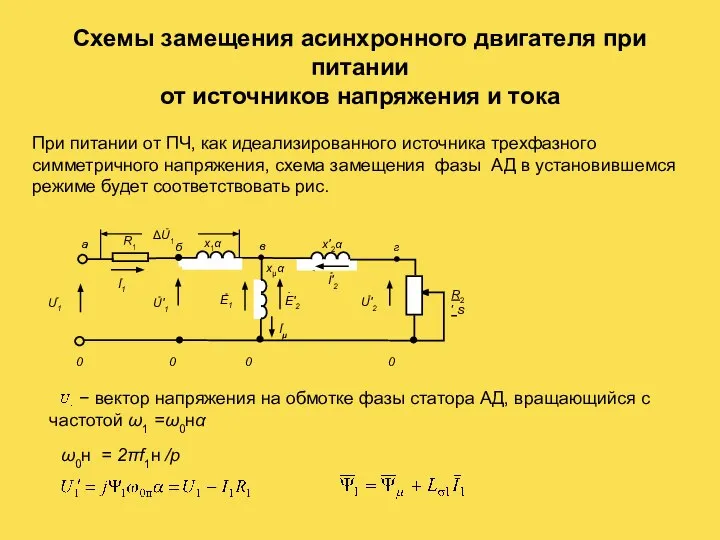
Схемы замещения асинхронного двигателя при питании
от источников напряжения и тока
При питании
Схемы замещения асинхронного двигателя при питании
от источников напряжения и тока
При питании
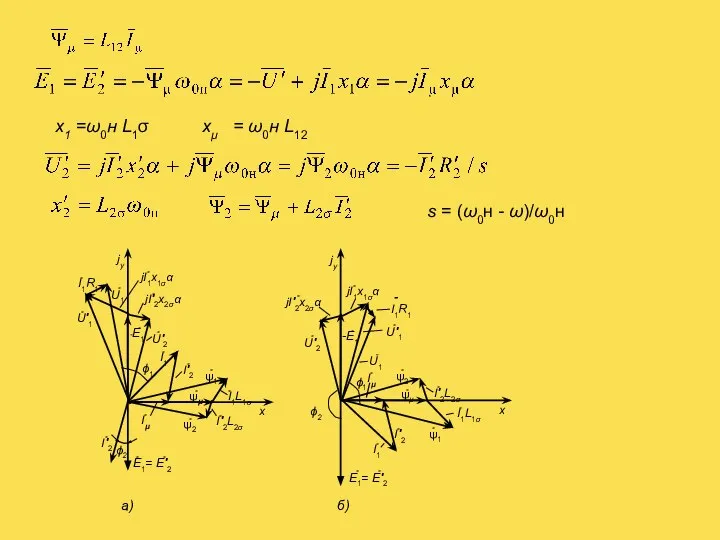
х1 =ω0н L1σ
хμ = ω0н L12
s = (ω0н -
х1 =ω0н L1σ
хμ = ω0н L12
s = (ω0н -
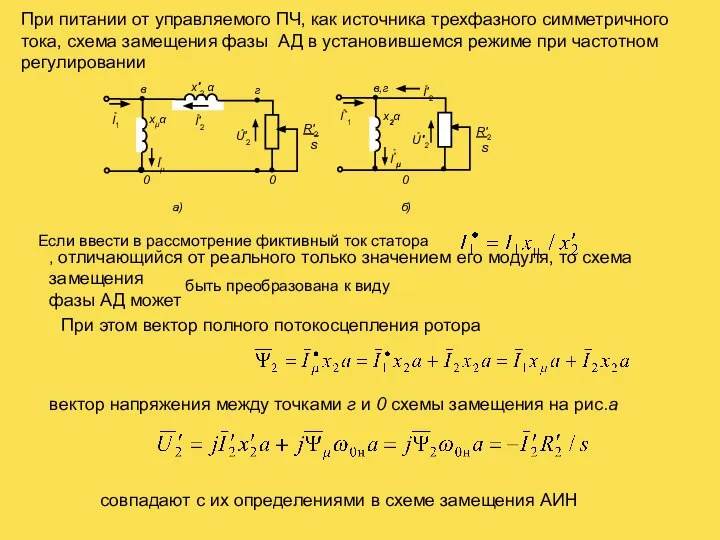
При питании от управляемого ПЧ, как источника трехфазного симметричного тока, схема
При питании от управляемого ПЧ, как источника трехфазного симметричного тока, схема
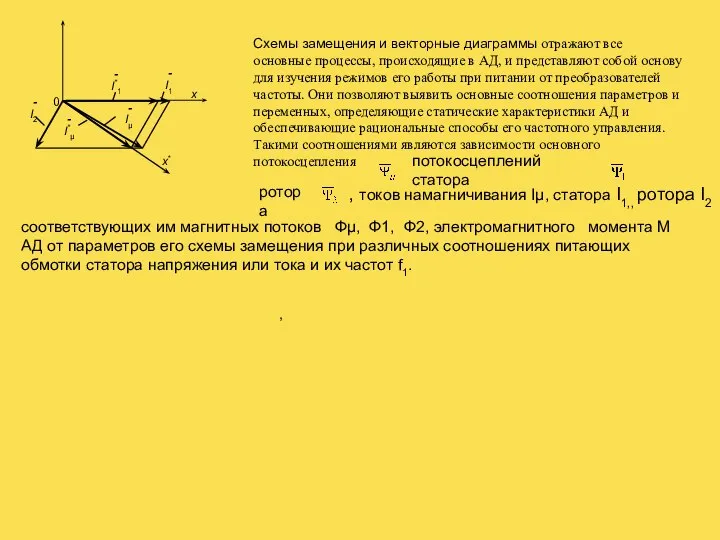
Схемы замещения и векторные диаграммы отражают все основные процессы, происходящие в
Схемы замещения и векторные диаграммы отражают все основные процессы, происходящие в
. Статические характеристики асинхронного двигателя
в разомкнутой системе ПЧ-АД
Статические характеристики АД при
. Статические характеристики асинхронного двигателя
в разомкнутой системе ПЧ-АД
Статические характеристики АД при
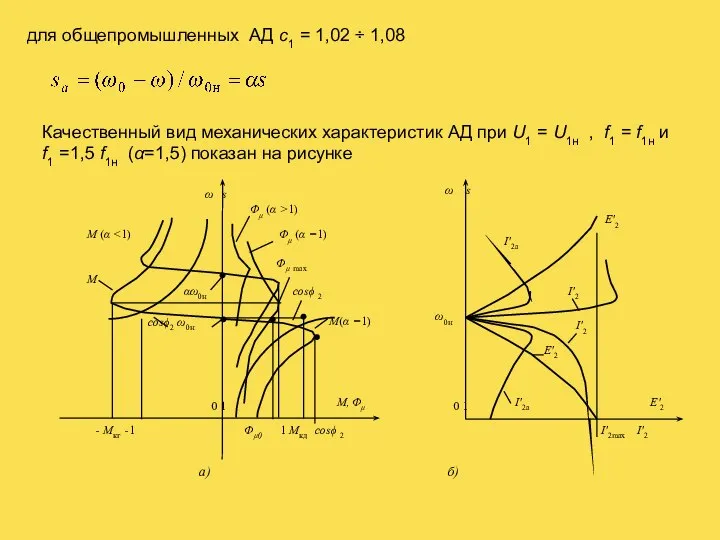
для общепромышленных АД с1 = 1,02 ÷ 1,08
Качественный вид механических
для общепромышленных АД с1 = 1,02 ÷ 1,08
Качественный вид механических
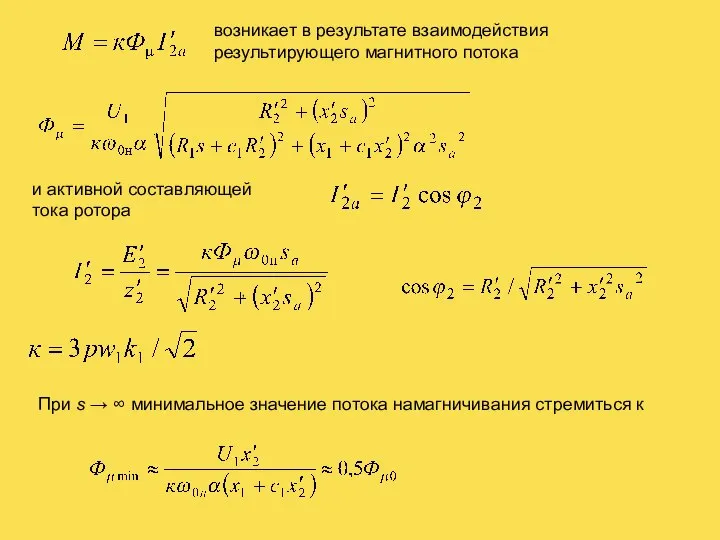
возникает в результате взаимодействия результирующего магнитного потока
и активной составляющей тока ротора
возникает в результате взаимодействия результирующего магнитного потока
и активной составляющей тока ротора
Нелинейность кривой
вызвана как нелинейностью
так и изменением индуктивного сопротивления рассеяния
Нелинейность кривой
вызвана как нелинейностью
так и изменением индуктивного сопротивления рассеяния
При U1 = const частотное регулирование скорости АД находит применение лишь
При U1 = const частотное регулирование скорости АД находит применение лишь
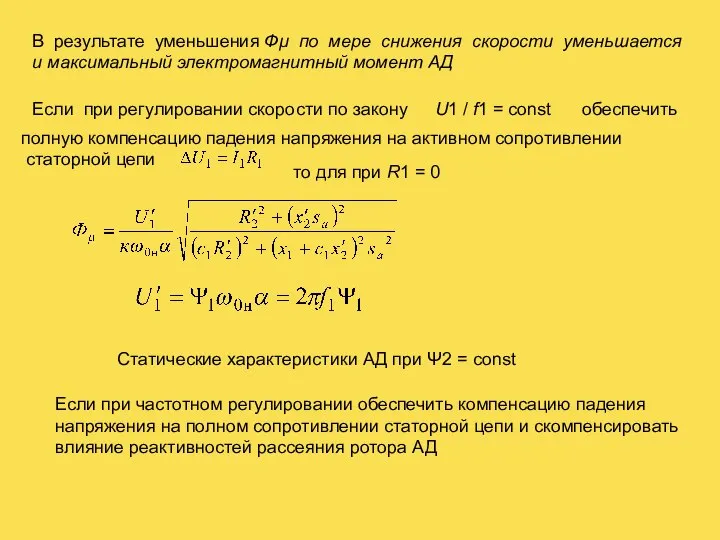
В результате уменьшения Фμ по мере снижения скорости уменьшается и максимальный
В результате уменьшения Фμ по мере снижения скорости уменьшается и максимальный
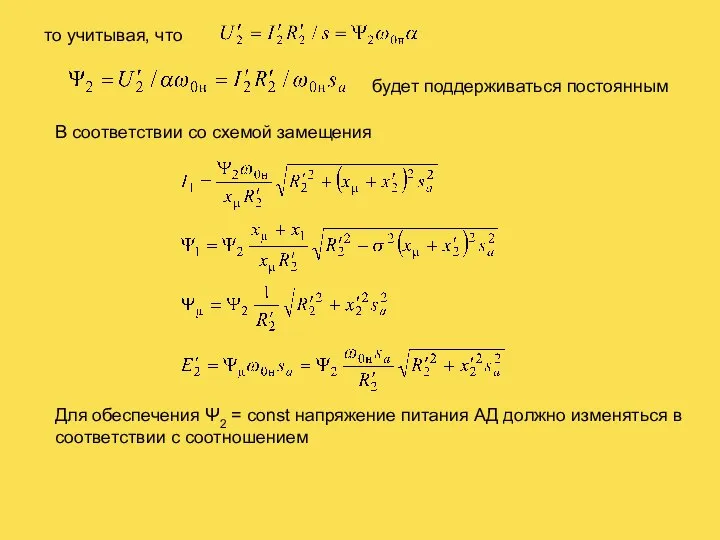
то учитывая, что
будет поддерживаться постоянным
В соответствии со схемой замещения
то учитывая, что
будет поддерживаться постоянным
В соответствии со схемой замещения
где
Активная составляющая тока ротора
где
Активная составляющая тока ротора
при sа → ∞
Электромагнитный момент АД при Ψ2 = const
при sа → ∞
Электромагнитный момент АД при Ψ2 = const
Электромагнитная мощность и момент
асинхронного двигателя
Согласно теории обобщенной электрической машины, при вращении
Электромагнитная мощность и момент
асинхронного двигателя
Согласно теории обобщенной электрической машины, при вращении
Так как
То подставляя
получим
Если принять
const , то при вращении осей
Так как
То подставляя
получим
Если принять
const , то при вращении осей
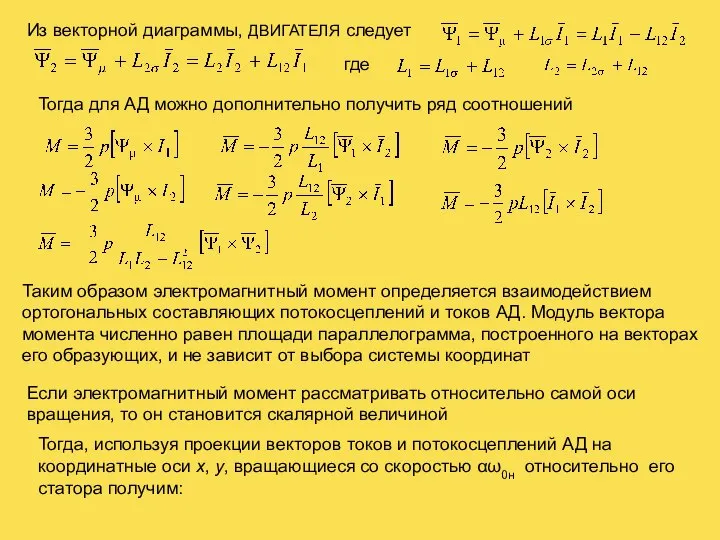
Из векторной диаграммы, ДВИГАТЕЛЯ следует
где
Тогда для АД можно дополнительно
Из векторной диаграммы, ДВИГАТЕЛЯ следует
где
Тогда для АД можно дополнительно
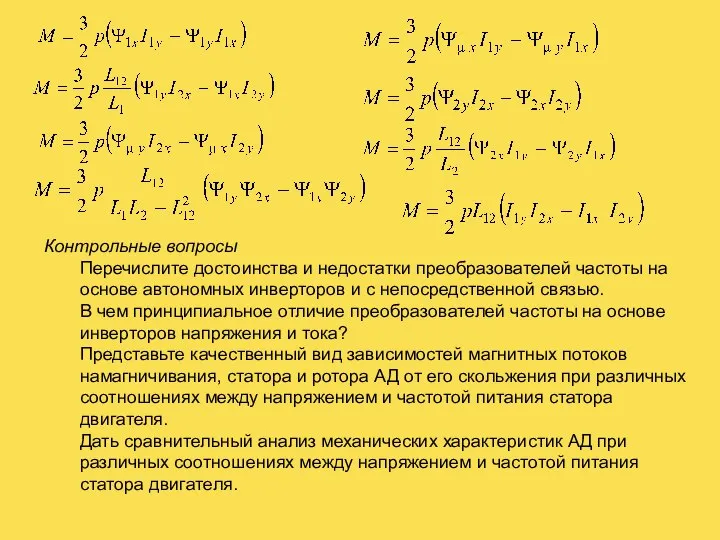
Контрольные вопросы
Перечислите достоинства и недостатки преобразователей частоты на основе автономных инверторов
Контрольные вопросы
Перечислите достоинства и недостатки преобразователей частоты на основе автономных инверторов
 Презентация "Барокко в интерьере" - скачать презентации по МХК
Презентация "Барокко в интерьере" - скачать презентации по МХК Программируемая логическая интегральная схема (ПЛИС)
Программируемая логическая интегральная схема (ПЛИС) Классификация осужденных
Классификация осужденных Учитель и проблемы дисциплины Психолого-педагогический семинар Психолог Гонтарева Н.М. Ноябрь 2012г.
Учитель и проблемы дисциплины Психолого-педагогический семинар Психолог Гонтарева Н.М. Ноябрь 2012г. Современное пятиборье – больше, чем спорт
Современное пятиборье – больше, чем спорт Дыбыстар әлемі
Дыбыстар әлемі История уголовной политики России в области таможенного дела
История уголовной политики России в области таможенного дела  Институты развития и их роль в реализации проектов
Институты развития и их роль в реализации проектов Близорукость и дальнозоркость
Близорукость и дальнозоркость Управление процессами. Системы управления
Управление процессами. Системы управления Характеристика СПС: Консультант плюс, Гарант, Кодекс
Характеристика СПС: Консультант плюс, Гарант, Кодекс Презентация "Афинский Акрополь" - скачать презентации по МХК
Презентация "Афинский Акрополь" - скачать презентации по МХК Понятие и институты непосредственной демократии. Референдум
Понятие и институты непосредственной демократии. Референдум Презентация "Гойя, Франсиско" - скачать презентации по МХК
Презентация "Гойя, Франсиско" - скачать презентации по МХК Цель управления проектом и успешность проекта. SMART-критерии в целеполагании. (Тема 5)
Цель управления проектом и успешность проекта. SMART-критерии в целеполагании. (Тема 5) Эзотерическая медицина.Первое занятие
Эзотерическая медицина.Первое занятие Ядро
Ядро  Функции для рисования
Функции для рисования Мотивация персонала на проекте Аптека
Мотивация персонала на проекте Аптека Презентация к блоку уроков по теме «Французское искусство. Импрессионисты» Подготовила учитель французского языка МОУ «Средняя
Презентация к блоку уроков по теме «Французское искусство. Импрессионисты» Подготовила учитель французского языка МОУ «Средняя Виды и назначение канализационных систем
Виды и назначение канализационных систем Красота. Эталоны физической красоты в разных культурах
Красота. Эталоны физической красоты в разных культурах Introducción. Me llamo
Introducción. Me llamo Религиозные ритуалы. Обычаи и обряды
Религиозные ритуалы. Обычаи и обряды Оформление чертежей. Стандарты ЕСКД
Оформление чертежей. Стандарты ЕСКД Компьютерное моделирование артикуляторных и акустических процессов в естественных языков
Компьютерное моделирование артикуляторных и акустических процессов в естественных языков Презентация "Планы счетов" - скачать презентации по Экономике
Презентация "Планы счетов" - скачать презентации по Экономике Формирование ассортимента и качества пушно-меховых и овчинно-шубных товаров
Формирование ассортимента и качества пушно-меховых и овчинно-шубных товаров