- Аппаратные способы реализации ШИМ

Содержание
- 2. 1.5.2. Синусоидальная ШИМ, биполярный опорный сигнал Задача: вывести выражение для цифрового кода синусоидального модулирующего сигнала (кода
- 3. Уравнение фазовой модуляции - , его решение - положение фронтов прямоугольных импульсов на периоде Топ. Расчет
- 4. Пусть Еоп=1, тогда Ем=М. Выражение для модулирующего сигнала: Это вторая смещенная функция: F2(x)+C При единичной глубине
- 5. Состояние двоичного счетчика меняется от нуля до некоторой программируемой величины, которая называется кодом периода (Nmax). При
- 6. где ТТ − период импульсов, тактирующих двоичный счетчик; KTШ – коэффициент, зависящий от типа ШИМ. Для
- 7. Пример расчета кода модуляции. Дано: Nст = 12, т.е. Nmax = 255 М = 1,0 модулирующий
- 8. Математически сдвиг фазы В относительно фазы А выражается ϕВ = −1200. Пример расчета кода модуляции. Замечание.
- 9. Работа с таблицами кода модуляции. Процедура извлечения данных из таблиц может быть выполнена двумя основными способами:
- 10. «Один счетчик – три таблицы». При такой организации извлечения данных из таблиц мы выигрываем в работе
- 11. "Три счетчика – одна таблица". Используем симметрию МС по фазам Достоинства и недостатки противоположны предыдущему варианту.
- 12. Графическое представление Nm[К]A в формате счетчика опорного сигнала (Nст=12, М=1)
- 13. Расчет кода модуляции для отрицательной полуволны. В общем случае глубина модуляции меняется, => надо вычислять произведение
- 14. Алгоритм расчета кода модуляции для варианта «три счетчика – одна таблица»: Выбрать текущее значение кода глубины
- 15. В этом случае условие справедливо только для фазы А. Для фаз В и С условия определения
- 16. NCT=12, M=1. F_POL_A, F_POL_B, F_POL_C – таблицы флагов полярностей фаз модулирующего сигнала (в них состоянию 0/1
- 17. 1.5.3. Синусоидальная ШИМ, однополярный опорный сигнал Для расчета кода модуляции для положительной полуволны справедливо выражение: где
- 18. инверсия первого интервала: Расчет кода модуляции для отрицательной полуволны
- 19. Программная инверсия – на периоде Топ получаем не два импульса, а один. , значит и равны
- 20. Алгоритм расчета подобен расчету при биполярном ОС: если «+»,то производится суммирование с константой, если «–», то
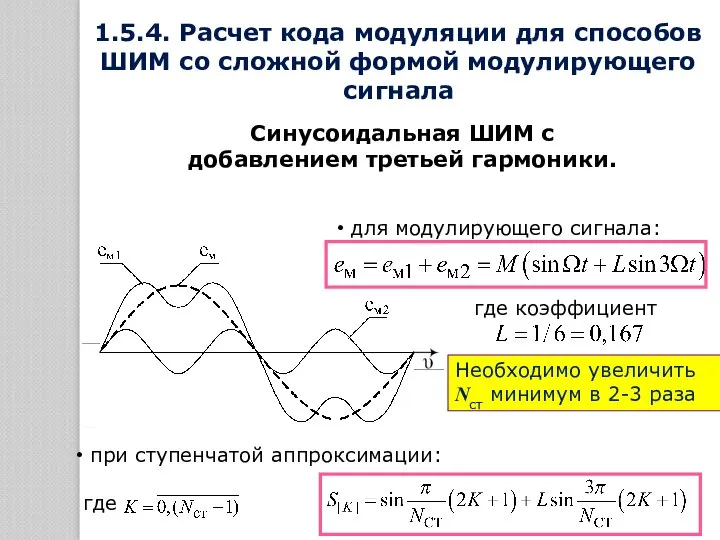
- 21. 1.5.4. Расчет кода модуляции для способов ШИМ со сложной формой модулирующего сигнала Синусоидальная ШИМ с добавлением
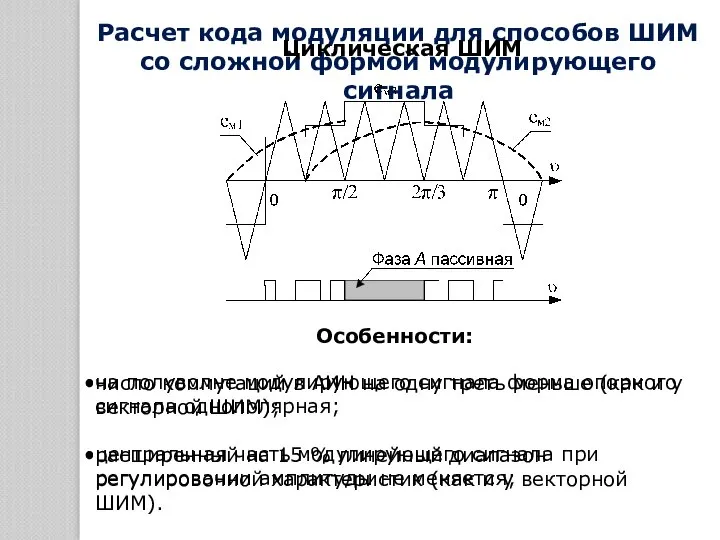
- 22. число коммутаций в АИН на одну треть меньше (как и у векторной ШИМ); расширенный на 15
- 23. еM3 - всегда ≥ Еоп величина зависит от M. Циклическая ШИМ величина зависит от M. величина
- 24. Циклическая ШИМ , где
- 25. Основы представления векторной ШИМ. 1.5.5. Расчет кода модуляции для векторной ШИМ
- 26. где Т1, Т2, Т0, Т7 - время существования одноименных векторов. Векторы состояния: 000 − V0 и
- 27. Порядок распределения векторов (и их длительностей) на интервале усреднения Где ϕ' – угловое положение обобщенного вектора
- 28. на Ts располагается только один нулевой вектор (или V0, или V7); образующие вектора чередуются по номеру
- 29. Порядок чередования векторов состояний инвертора по секторам
- 30. таблица чередования векторов состояния или таблица слов состояния вентилей (ССВ); два цифровых компаратора с возможностью прерывания
- 31. Алгоритм реализации в МК: Определяется текущее значение угла ϕ; Вычисляются сектор Sj, угол ϕ', номер ступеньки
- 32. В подпрограммах по прерыванию необходимо выполнить следующие задачи: подпрограмма по INT1 − в регистры сравнения компараторов
- 33. Векторную ШИМ можно представить и во временной области. Расчет кода модуляции для векторной ШИМ Выбор вида
- 34. Эти способы умножения используются, когда дроби известны и программист заранее может составить алгоритм их реализации. Разложив
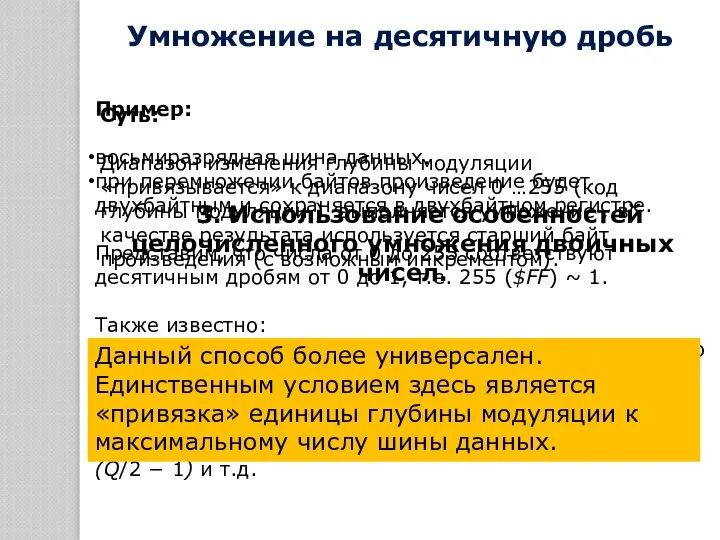
- 35. Пример: восьмиразрядная шина данных. при перемножении байтов произведение будет двухбайтным и сохраняется в двухбайтном регистре. Представим,
- 36. 4. Универсальный вариант Одно действие заменяется двумя: умножением и делением. Нужно строго выполнять этот порядок выполнения
- 37. Для управления 3У-АИН требуется шесть комплементарных пар импульсов. Особенности микропроцессорной реализации синусоидальной ШИМ в трехуровневом инверторе
- 38. Особенности микропроцессорной реализации синусоидальной ШИМ в трехуровневом инверторе напряжения. 2. Форма модулирующих и опорных сигналов
- 39. Необходимые аппаратные средства для ЗУ-АИН Наличие двух специализированных ШИМ-модулей «Motion Control» В ШИМ-модулях опорные сигналы должны
- 41. Скачать презентацию
1.5.2. Синусоидальная ШИМ, биполярный опорный сигнал
Задача: вывести выражение для цифрового кода
1.5.2. Синусоидальная ШИМ, биполярный опорный сигнал
Задача: вывести выражение для цифрового кода
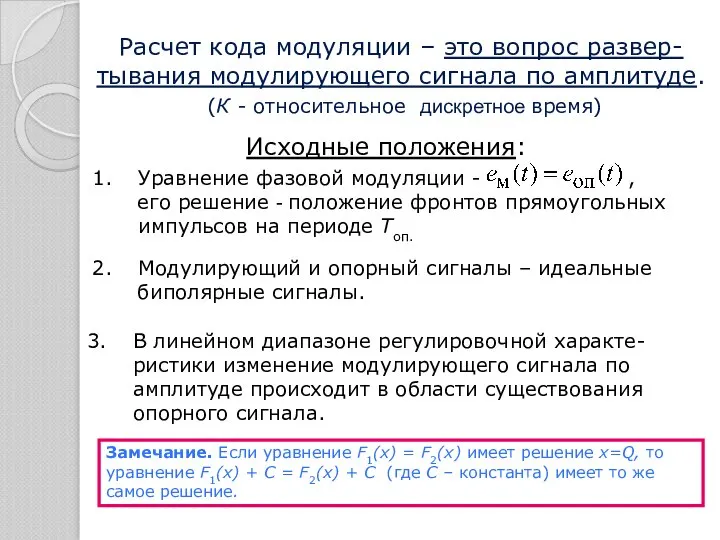
Уравнение фазовой модуляции - ,
его решение - положение фронтов прямоугольных
Уравнение фазовой модуляции - ,
его решение - положение фронтов прямоугольных
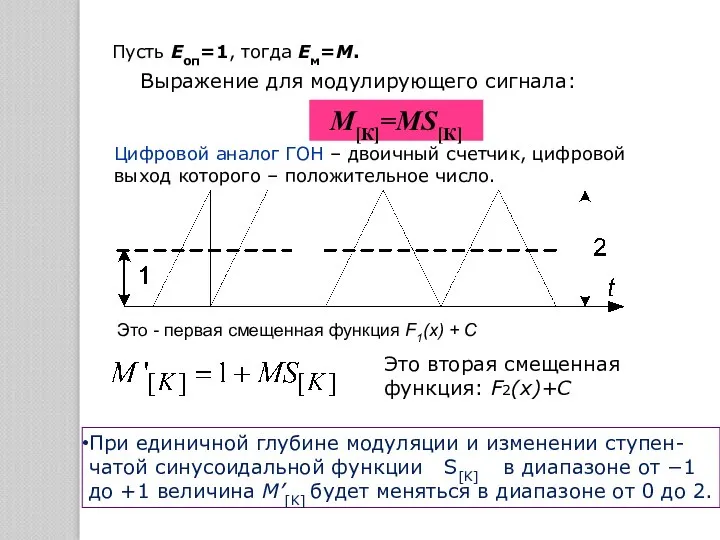
Пусть Еоп=1, тогда Ем=М.
Выражение для модулирующего сигнала:
Это вторая смещенная функция: F2(x)+C
При
Пусть Еоп=1, тогда Ем=М.
Выражение для модулирующего сигнала:
Это вторая смещенная функция: F2(x)+C
При
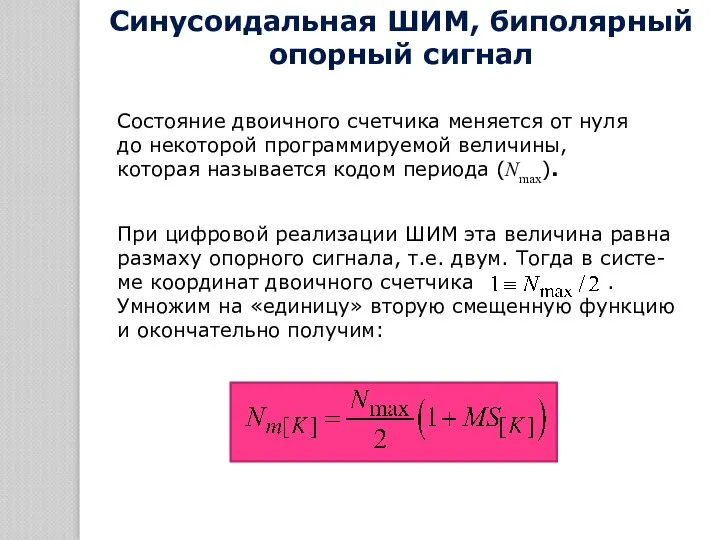
Состояние двоичного счетчика меняется от нуля до некоторой программируемой величины, которая
Состояние двоичного счетчика меняется от нуля до некоторой программируемой величины, которая
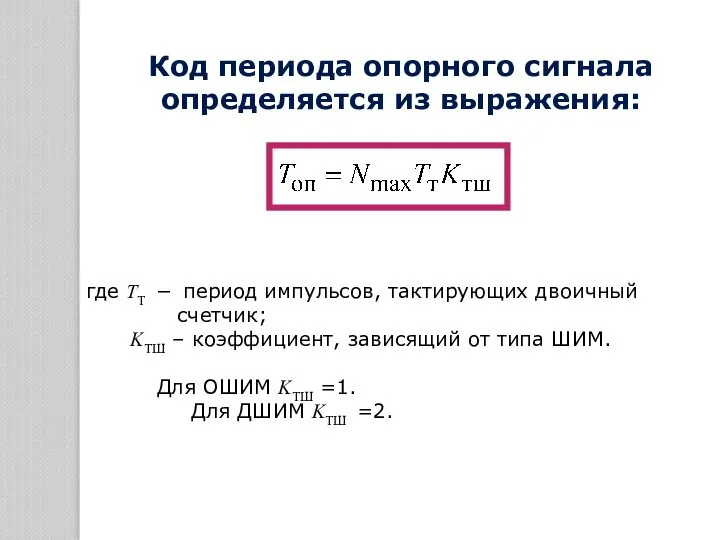
где ТТ − период импульсов, тактирующих двоичный
счетчик;
KTШ –
где ТТ − период импульсов, тактирующих двоичный
счетчик;
KTШ –
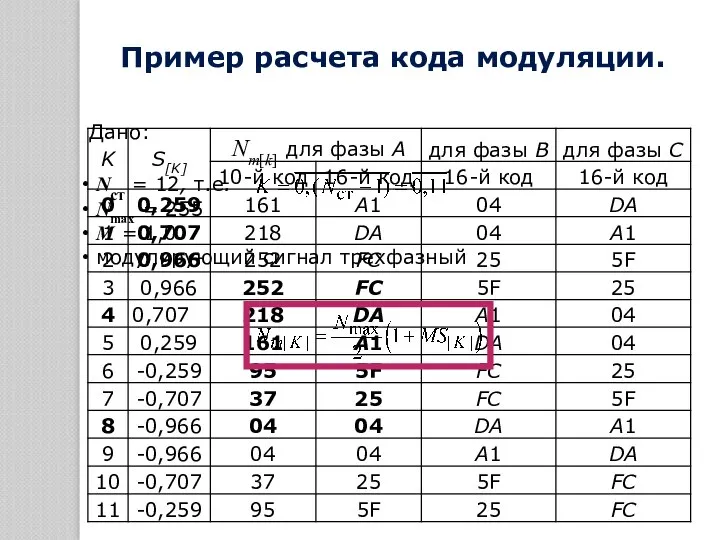
Пример расчета кода модуляции.
Дано:
Nст = 12, т.е.
Nmax = 255
Пример расчета кода модуляции.
Дано:
Nст = 12, т.е.
Nmax = 255
Математически сдвиг фазы В относительно фазы А выражается ϕВ = −1200.
Математически сдвиг фазы В относительно фазы А выражается ϕВ = −1200.
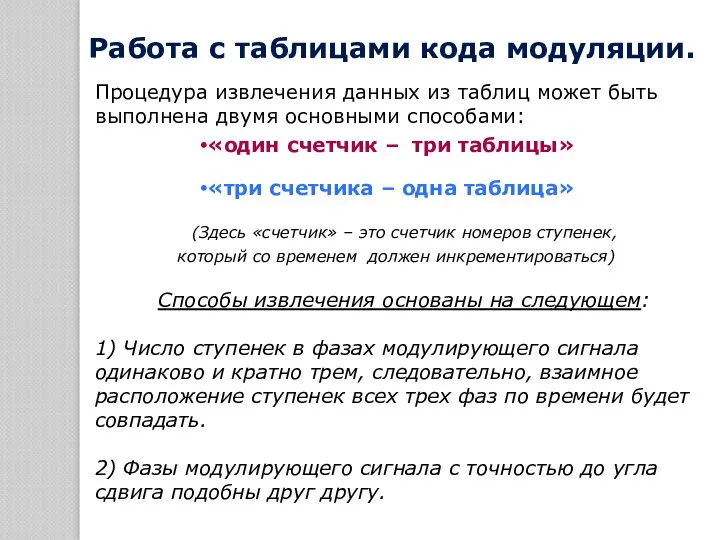
Работа с таблицами кода модуляции.
Процедура извлечения данных из таблиц может
Работа с таблицами кода модуляции.
Процедура извлечения данных из таблиц может
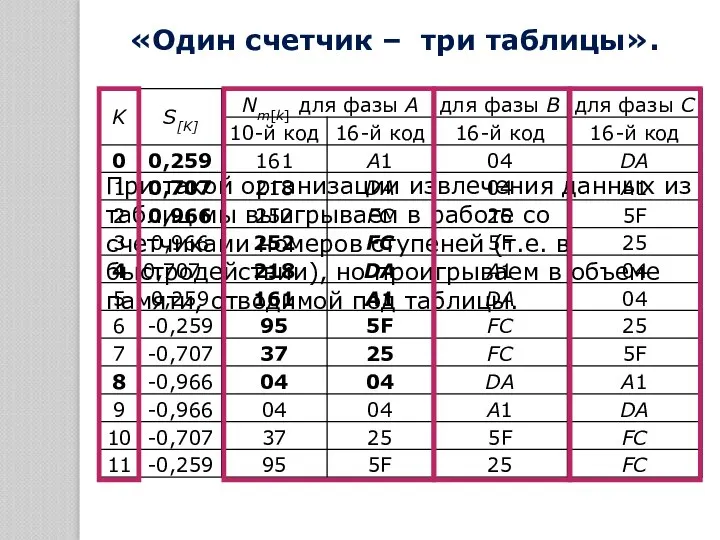
«Один счетчик – три таблицы».
При такой организации извлечения данных из
«Один счетчик – три таблицы».
При такой организации извлечения данных из
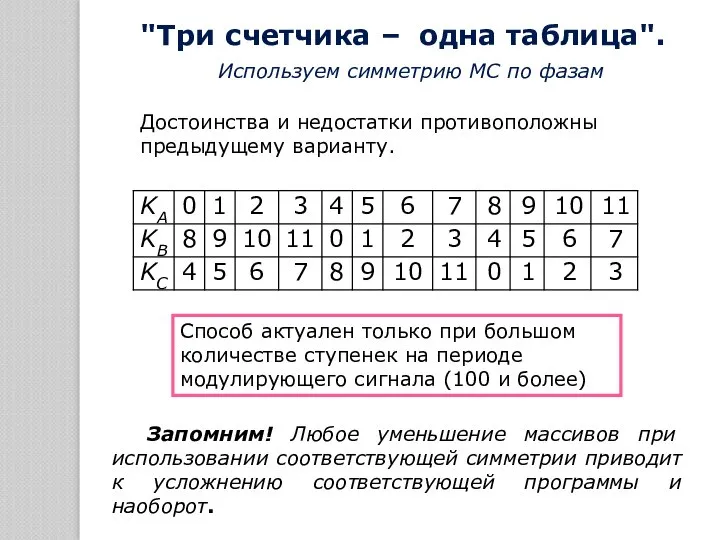
"Три счетчика – одна таблица".
Используем симметрию МС по фазам
Достоинства и
"Три счетчика – одна таблица".
Используем симметрию МС по фазам
Достоинства и
![Графическое представление Nm[К]A в формате счетчика опорного сигнала (Nст=12, М=1)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1472503/slide-11.jpg)
Графическое представление Nm[К]A в формате счетчика опорного сигнала
(Nст=12, М=1)
Графическое представление Nm[К]A в формате счетчика опорного сигнала
(Nст=12, М=1)
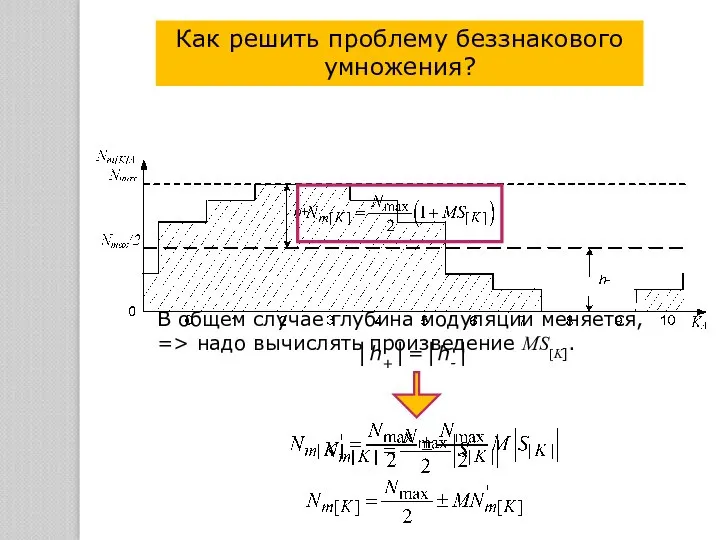
Расчет кода модуляции для отрицательной полуволны.
В общем случае глубина модуляции меняется,
Расчет кода модуляции для отрицательной полуволны.
В общем случае глубина модуляции меняется,
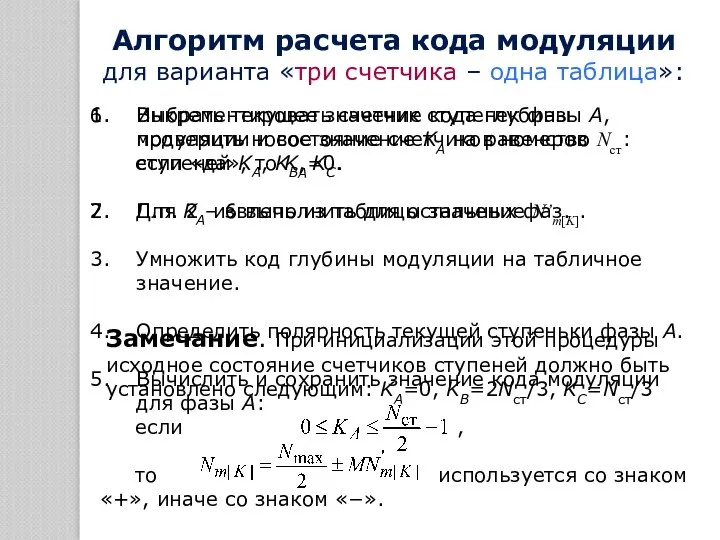
Алгоритм расчета кода модуляции для варианта «три счетчика – одна таблица»:
Алгоритм расчета кода модуляции для варианта «три счетчика – одна таблица»:
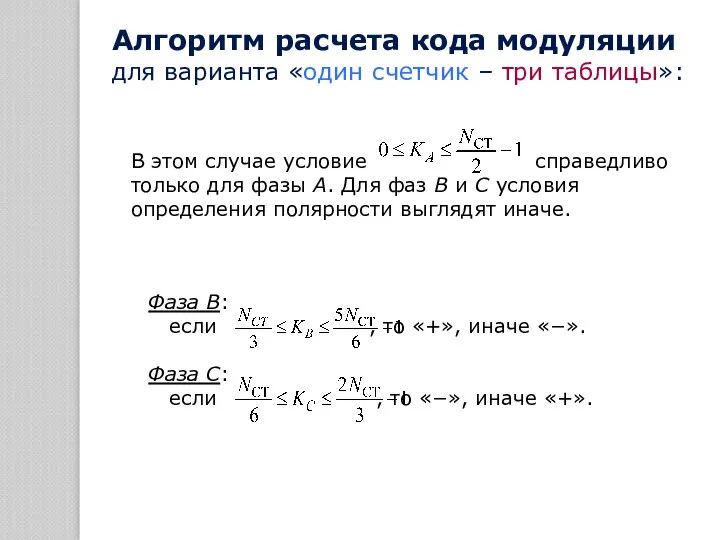
В этом случае условие справедливо только для фазы А. Для фаз
В этом случае условие справедливо только для фазы А. Для фаз
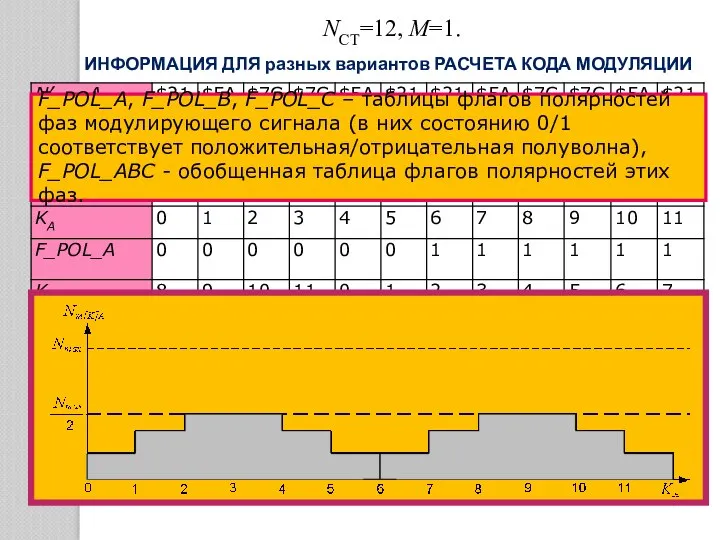
NCT=12, M=1.
F_POL_A, F_POL_B, F_POL_C – таблицы флагов полярностей фаз модулирующего сигнала
NCT=12, M=1.
F_POL_A, F_POL_B, F_POL_C – таблицы флагов полярностей фаз модулирующего сигнала
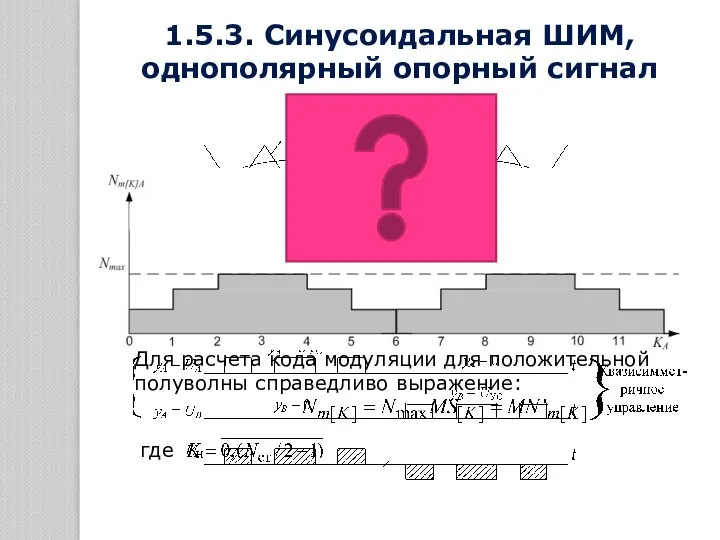
1.5.3. Синусоидальная ШИМ, однополярный опорный сигнал
Для расчета кода модуляции для положительной
1.5.3. Синусоидальная ШИМ, однополярный опорный сигнал
Для расчета кода модуляции для положительной
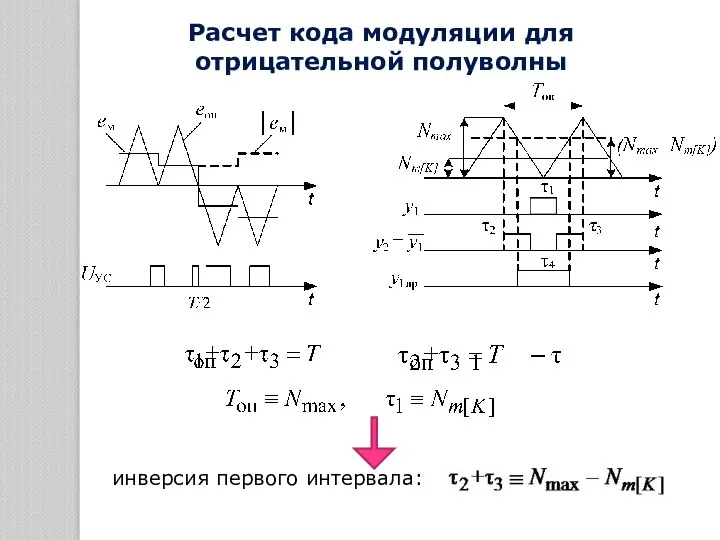
инверсия первого интервала:
Расчет кода модуляции для отрицательной полуволны
инверсия первого интервала:
Расчет кода модуляции для отрицательной полуволны
Программная инверсия – на периоде Топ получаем не два
импульса, а один.
Программная инверсия – на периоде Топ получаем не два
импульса, а один.
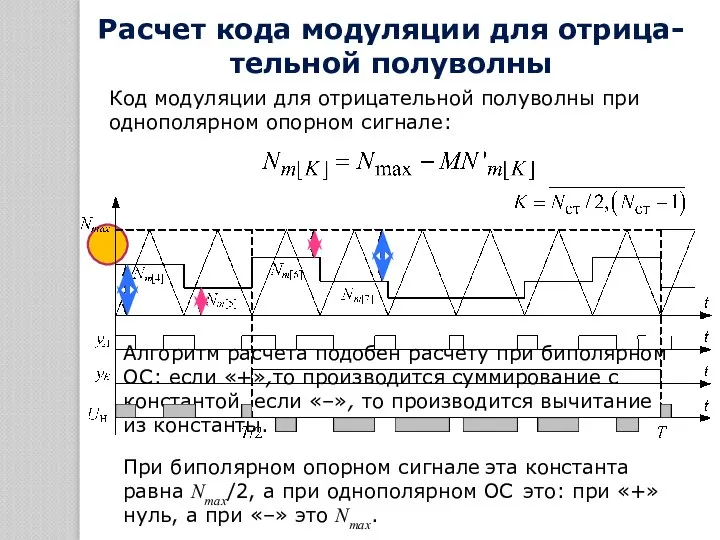
Алгоритм расчета подобен расчету при биполярном ОС: если «+»,то производится суммирование
Алгоритм расчета подобен расчету при биполярном ОС: если «+»,то производится суммирование
1.5.4. Расчет кода модуляции для способов ШИМ со сложной формой модулирующего
1.5.4. Расчет кода модуляции для способов ШИМ со сложной формой модулирующего
число коммутаций в АИН на одну треть меньше (как и у
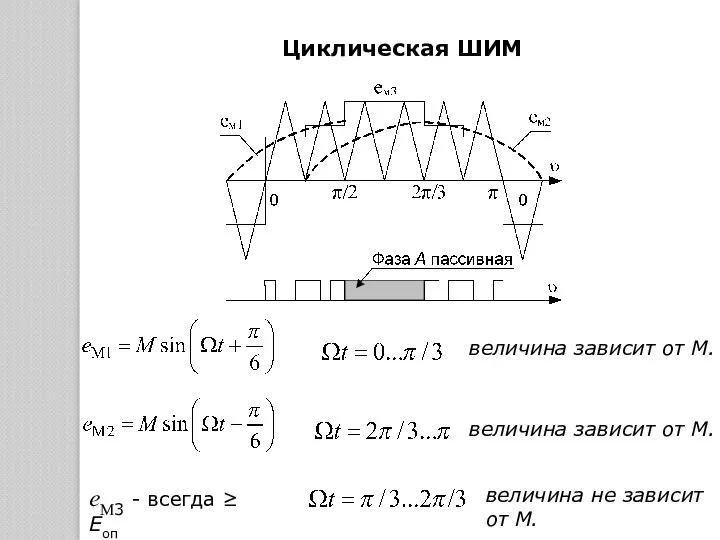
еM3 - всегда ≥ Еоп
величина зависит от M.
Циклическая ШИМ
величина зависит
еM3 - всегда ≥ Еоп
величина зависит от M.
Циклическая ШИМ
величина зависит
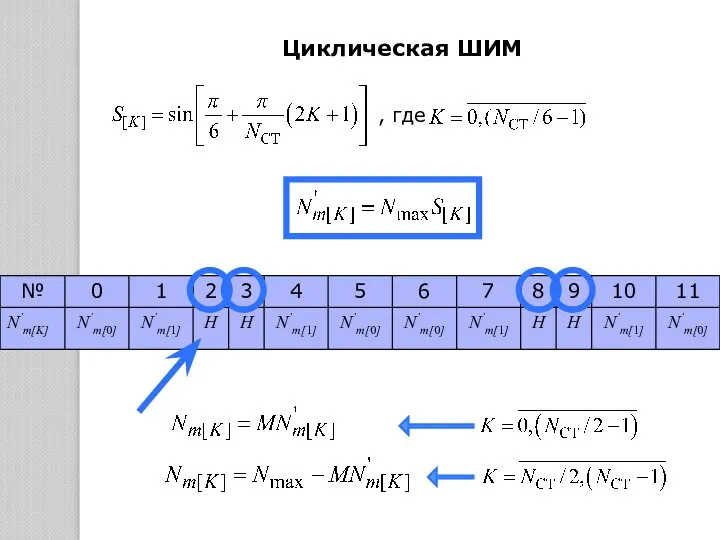
Циклическая ШИМ
, где
Циклическая ШИМ
, где
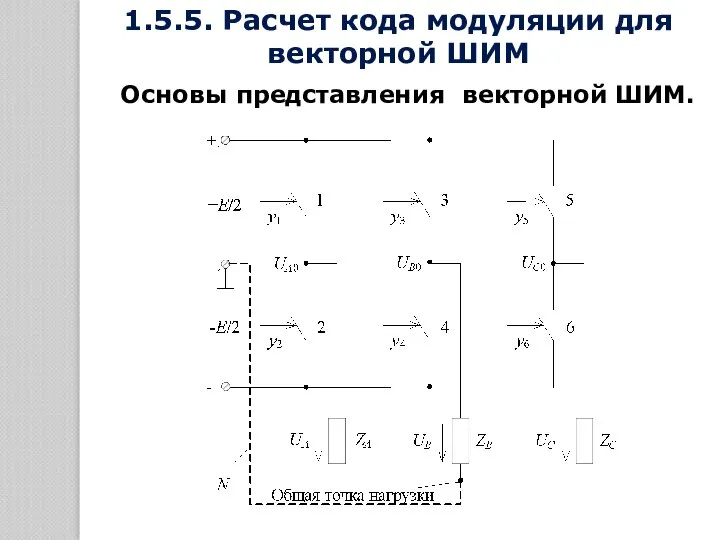
Основы представления векторной ШИМ.
1.5.5. Расчет кода модуляции для векторной ШИМ
Основы представления векторной ШИМ.
1.5.5. Расчет кода модуляции для векторной ШИМ

где Т1, Т2, Т0, Т7 - время существования одноименных векторов.
Векторы состояния:
где Т1, Т2, Т0, Т7 - время существования одноименных векторов.
Векторы состояния:
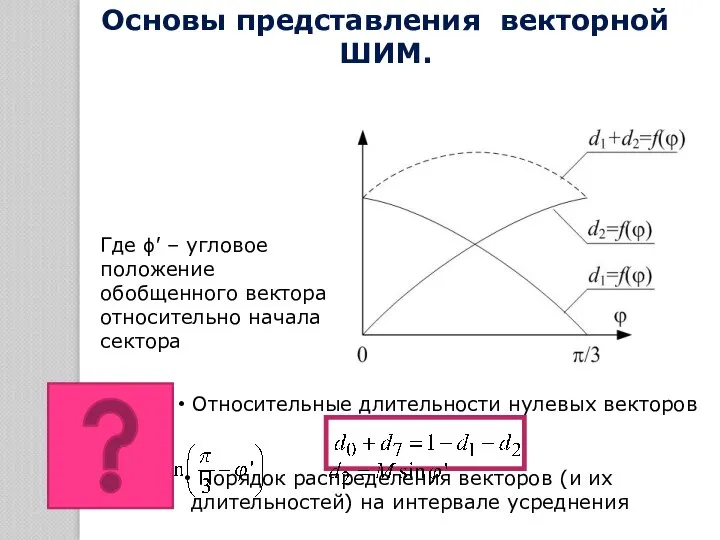
Порядок распределения векторов (и их длительностей) на интервале усреднения
Где ϕ'
Порядок распределения векторов (и их длительностей) на интервале усреднения
Где ϕ'
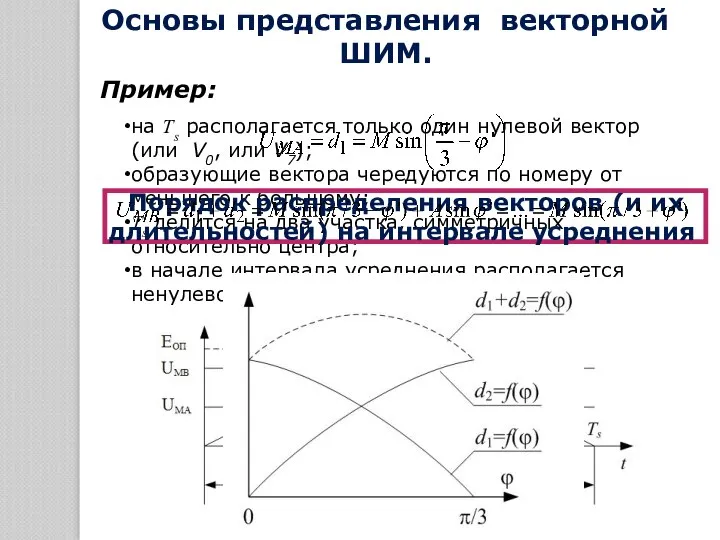
на Ts располагается только один нулевой вектор (или V0, или V7);
образующие
на Ts располагается только один нулевой вектор (или V0, или V7);
образующие

Порядок чередования векторов состояний инвертора по секторам
Порядок чередования векторов состояний инвертора по секторам
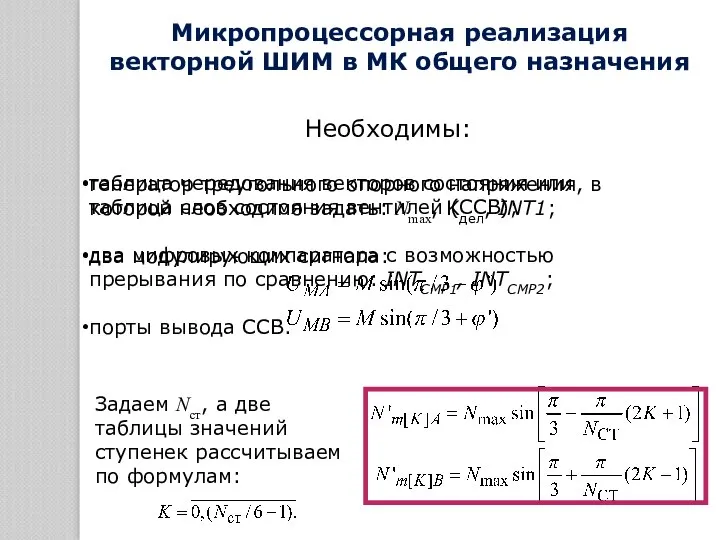
таблица чередования векторов состояния или таблица слов состояния вентилей (ССВ);
два цифровых
таблица чередования векторов состояния или таблица слов состояния вентилей (ССВ);
два цифровых
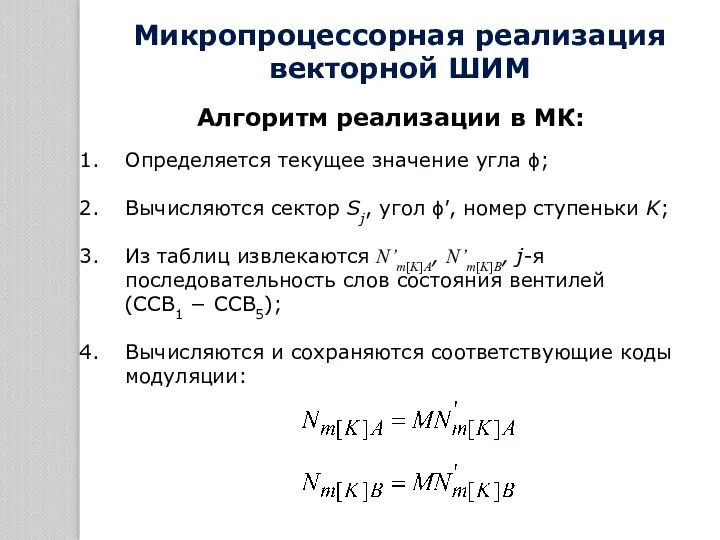
Алгоритм реализации в МК:
Определяется текущее значение угла ϕ;
Вычисляются сектор Sj, угол
Алгоритм реализации в МК:
Определяется текущее значение угла ϕ;
Вычисляются сектор Sj, угол
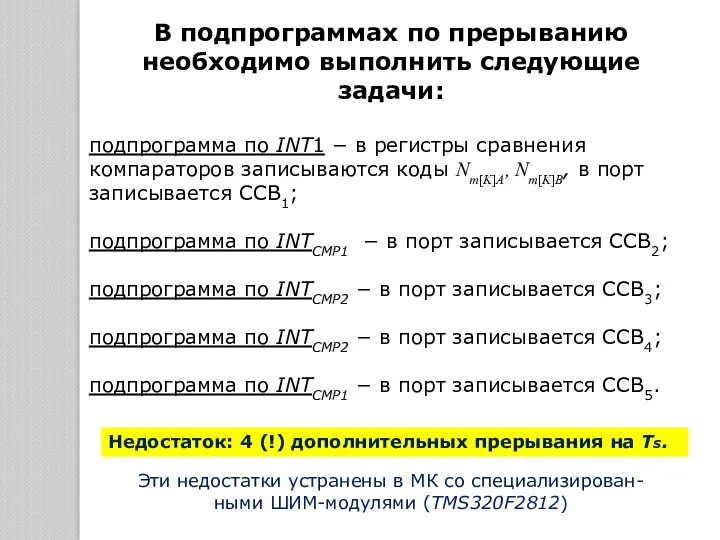
В подпрограммах по прерыванию необходимо выполнить следующие задачи:
подпрограмма по INT1 −
В подпрограммах по прерыванию необходимо выполнить следующие задачи:
подпрограмма по INT1 −
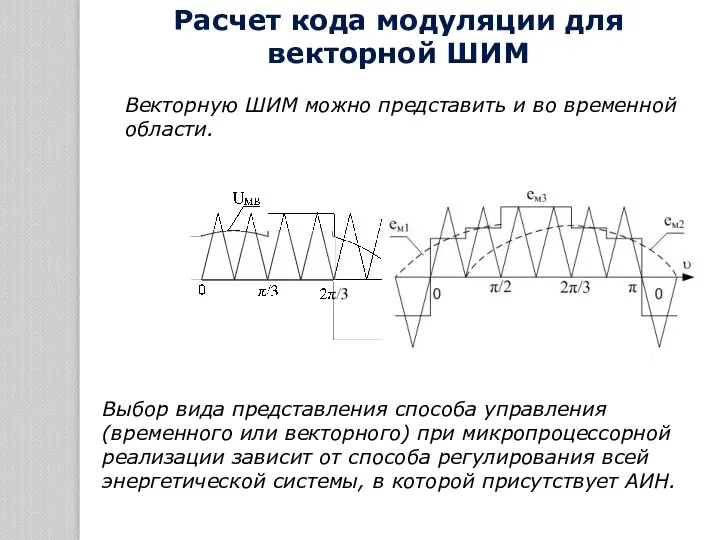
Векторную ШИМ можно представить и во временной области.
Расчет кода модуляции для
Векторную ШИМ можно представить и во временной области.
Расчет кода модуляции для
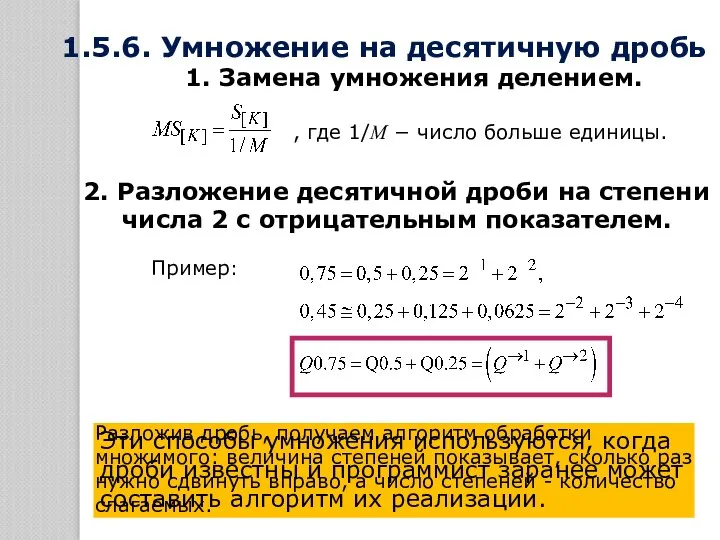
Эти способы умножения используются, когда дроби известны и программист заранее может
Эти способы умножения используются, когда дроби известны и программист заранее может
Пример:
восьмиразрядная шина данных.
при перемножении байтов произведение будет двухбайтным и
Пример:
восьмиразрядная шина данных.
при перемножении байтов произведение будет двухбайтным и
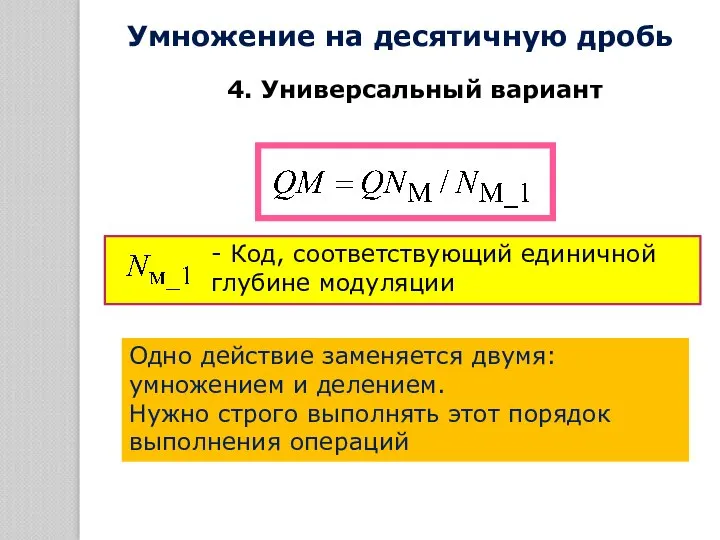
4. Универсальный вариант
Одно действие заменяется двумя: умножением и делением.
Нужно строго
4. Универсальный вариант
Одно действие заменяется двумя: умножением и делением.
Нужно строго
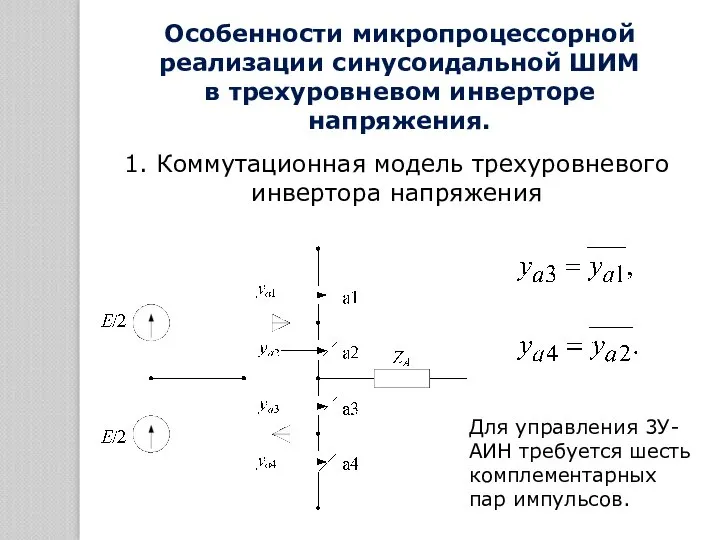
Для управления 3У-АИН требуется шесть комплементарных пар импульсов.
Особенности микропроцессорной реализации
Для управления 3У-АИН требуется шесть комплементарных пар импульсов.
Особенности микропроцессорной реализации
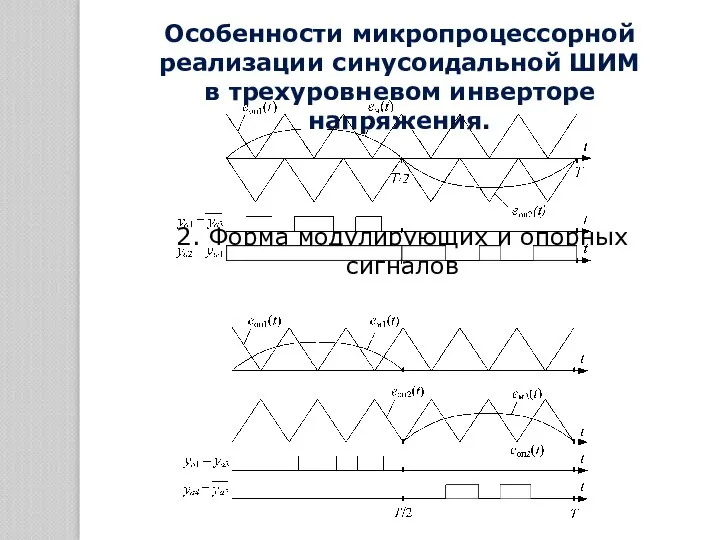
Особенности микропроцессорной реализации синусоидальной ШИМ
в трехуровневом инверторе напряжения.
2. Форма
Особенности микропроцессорной реализации синусоидальной ШИМ
в трехуровневом инверторе напряжения.
2. Форма
Необходимые аппаратные средства для ЗУ-АИН
Наличие двух специализированных ШИМ-модулей «Motion Control»
В ШИМ-модулях
Необходимые аппаратные средства для ЗУ-АИН
Наличие двух специализированных ШИМ-модулей «Motion Control»
В ШИМ-модулях
 Анализ исполнения ОМС постановления Правительства РФ от 23.05.2006 №306 «Об утверждении Правил установления и определения нормативов п
Анализ исполнения ОМС постановления Правительства РФ от 23.05.2006 №306 «Об утверждении Правил установления и определения нормативов п Проект: Дом будущего
Проект: Дом будущего Саясат Субъектілері
Саясат Субъектілері Быт и нравы Древней Руси
Быт и нравы Древней Руси Расчет числа путей в парках технологического назначения и количества локомотивов для перевозки слитковозных составов
Расчет числа путей в парках технологического назначения и количества локомотивов для перевозки слитковозных составов Большой адронный коллайдер
Большой адронный коллайдер Презентация на тему Пиление столярной ножовкой
Презентация на тему Пиление столярной ножовкой  Султанат Оман. Особенности конституционной истории и общественного строя Омана
Султанат Оман. Особенности конституционной истории и общественного строя Омана Отношение художника к миру вещей
Отношение художника к миру вещей Презентация Реферат Виды научных работ
Презентация Реферат Виды научных работ ПОНЯТИЕ «МЕТОДА», «МЕТОДИКИ» И «МЕТОДОЛОГИИ» НАУЧНОГО ПОЗНАНИЯ. ИХ ВЗАИМОСВЯЗЬ. Подготовила студентка 1 курса ФТД группы Т-1207 Пон
ПОНЯТИЕ «МЕТОДА», «МЕТОДИКИ» И «МЕТОДОЛОГИИ» НАУЧНОГО ПОЗНАНИЯ. ИХ ВЗАИМОСВЯЗЬ. Подготовила студентка 1 курса ФТД группы Т-1207 Пон Операционная память компьютера
Операционная память компьютера  Современные религиозные проблемы
Современные религиозные проблемы Понятие банковского права
Понятие банковского права Семинар 15. Изгибные колебания стержня (самостоятельная)
Семинар 15. Изгибные колебания стержня (самостоятельная) Электронная микроскопия биологических объектов
Электронная микроскопия биологических объектов Презентация Опрос по теме: «Предпринимательское решение»
Презентация Опрос по теме: «Предпринимательское решение» Досуг молодежи
Досуг молодежи 1 октября 2011 - Project Management Camp «30 советов по управлению маркетинговыми услугами»
1 октября 2011 - Project Management Camp «30 советов по управлению маркетинговыми услугами»  Акция. Что такое акция?
Акция. Что такое акция? Тестирование удобства использования
Тестирование удобства использования Острая и хроническая специфическая хирургическая инфекция
Острая и хроническая специфическая хирургическая инфекция  Организации заимствований органами государственной власти и органами местного самоуправления в КНР
Организации заимствований органами государственной власти и органами местного самоуправления в КНР Международная политика. Международные отношения
Международная политика. Международные отношения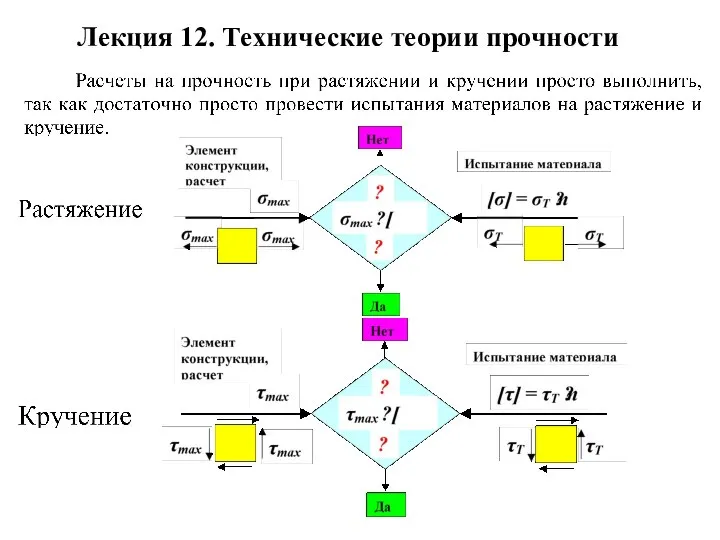 Технические теории прочности
Технические теории прочности Атмосфера и климат Земли
Атмосфера и климат Земли Соотношение, общие характеристики и принципиальные отличия тарифных и нетарифных мер регулирования внешнеторговой деятельности
Соотношение, общие характеристики и принципиальные отличия тарифных и нетарифных мер регулирования внешнеторговой деятельности  Содержание теории трудовой стоимости и предельной полезности
Содержание теории трудовой стоимости и предельной полезности