- Асинхронное выполнение задач

Содержание
- 2. Приложение реального времени Асинхронное выполнение задач Задача 1 «Виртуальная машина» Задача N . . . «Виртуальная
- 3. Описание S1 Sn Parbegin S1; . . . Sn Parend; S1 S2 S3 S4 Parbegin begin
- 4. Диаграммы последовательности Диаграммы активности : Main : Consumer : Prodused new new notEmpty notFull cancel cancel
- 5. Проблемы Критическая секция Взаимная блокировка (тупики, deadlock) D 1 Захватить R1 3 2 1 5 6
- 6. Задача А t ta КС1 ta Задача B t tb tb КС2 а) недопустимо одновременное выполнение
- 7. Алгоритм Деккера - вспомогательная схема 1 integer Очередь = 1; Parbegin while(true){ while(Очередь == 2){} КС_1;
- 8. Алгоритм Деккера, вспомогательная схема 1 Вспомогательная схема 1: задача не решена а) при остановке одного из
- 9. Алгоритм Деккера - вспомогательная схема 2 integer с1 = 1, //занят с2 = 0; //свободен; Parbegin
- 10. Вспомогательная схема 2: задача не решена а) при одновременном выполнении действий {*} происходит блокировка Однако б)
- 11. Алгоритм Деккера, реализация Parbegin while(true){ с1:= 1; {*} while(с2==1){ if(Очередь == 2){ с1 = 0; }
- 12. а) В теле цикла {**} параметр цикла не изменяется, т.е. цикл {**} можно представить как «занятое
- 13. Механизм семафоров Двоичный семафор class ДвСемафор { private integer значение = 1; void P{ if(значение =
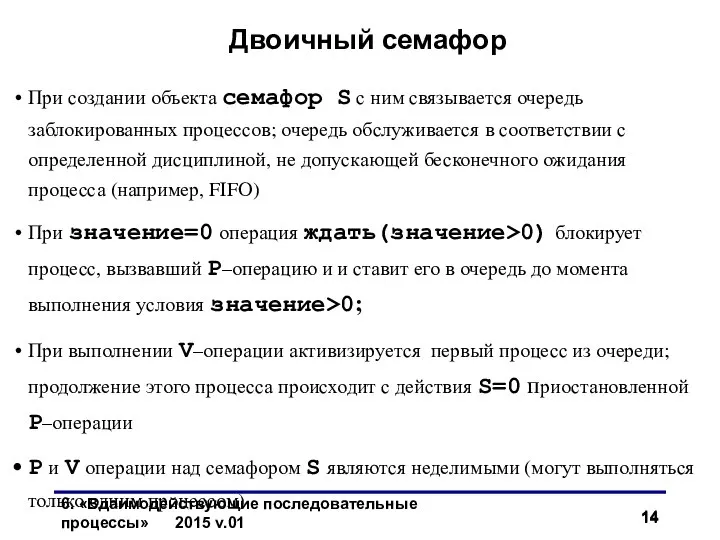
- 14. Двоичный семафор При создании объекта семафор S с ним связывается очередь заблокированных процессов; очередь обслуживается в
- 15. Обеспечение взаимного исключения ДвСемафор S = new ДвСемафор(); Ri: loop S.P(); КС_I; S.V(); Остальное_I; endloop; Parbegin
- 16. Общий (счетный) семафор class ОбСемафор { private integer значение; private integer maxЗначение; ОбСемафор(integer n, m) {
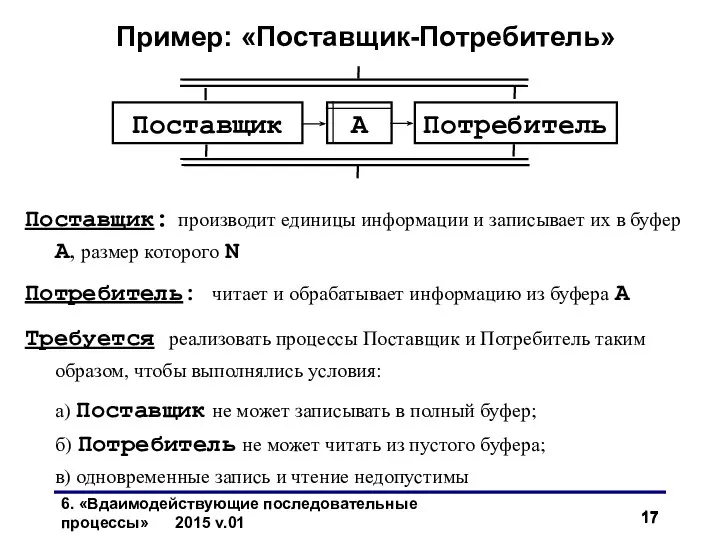
- 17. Пример: «Поставщик-Потребитель» Поставщик: производит единицы информации и записывает их в буфер А, размер которого N Потребитель:
- 18. Parbegin Поставщик; Потребитель Parend; Поставщик: loop Производство; (*) Полон.P(); (**) Доступ.P(); Запись_в_буфер; Доступ.V(); Пуст.V(); endloop. «Поставщик-Потребитель»
- 19. 6. «Вдаимодействующие последовательные процессы» 2015 v.01 Недостатки механизма семафоров Низкий уровень, слабая защищенность от ошибок при
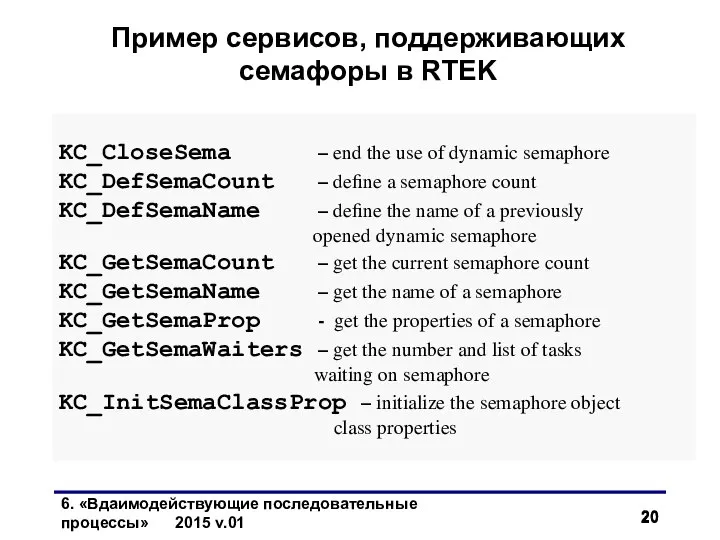
- 20. 6. «Вдаимодействующие последовательные процессы» 2015 v.01 Пример сервисов, поддерживающих семафоры в RTEK KC_CloseSema – end the
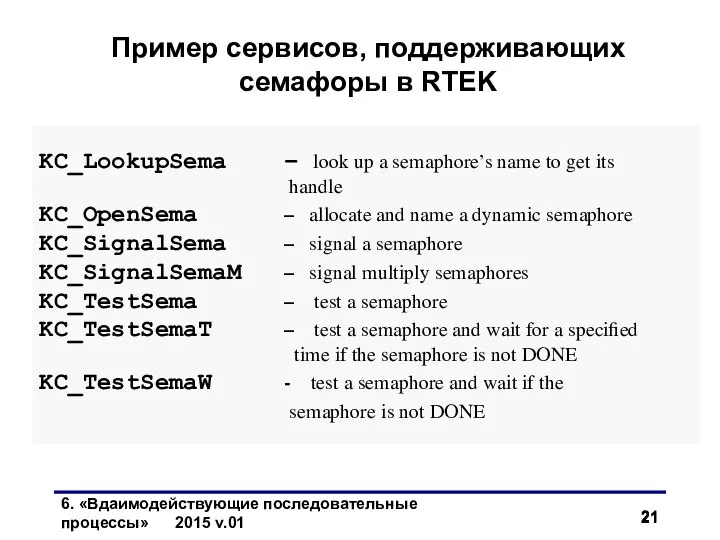
- 21. 6. «Вдаимодействующие последовательные процессы» 2015 v.01 KC_LookupSema – look up a semaphore’s name to get its
- 23. Скачать презентацию
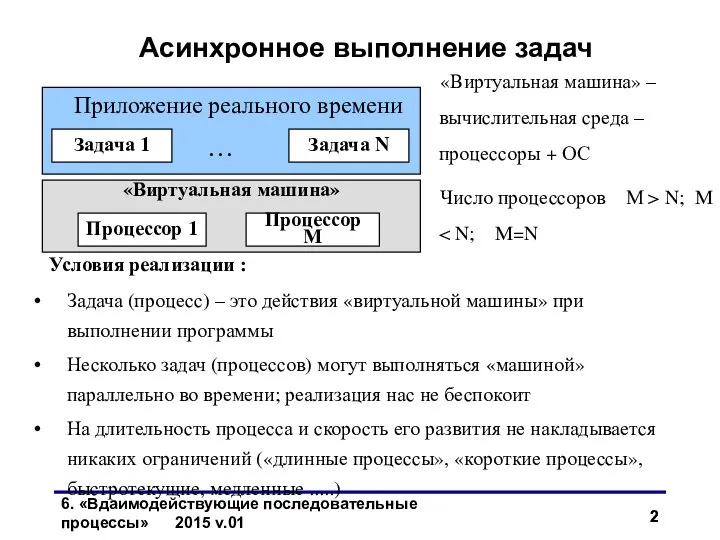
Приложение реального времени
Асинхронное выполнение задач
Задача 1
«Виртуальная машина»
Задача N
. . .
«Виртуальная машина»
Приложение реального времени
Асинхронное выполнение задач
Задача 1
«Виртуальная машина»
Задача N
. . .
«Виртуальная машина»
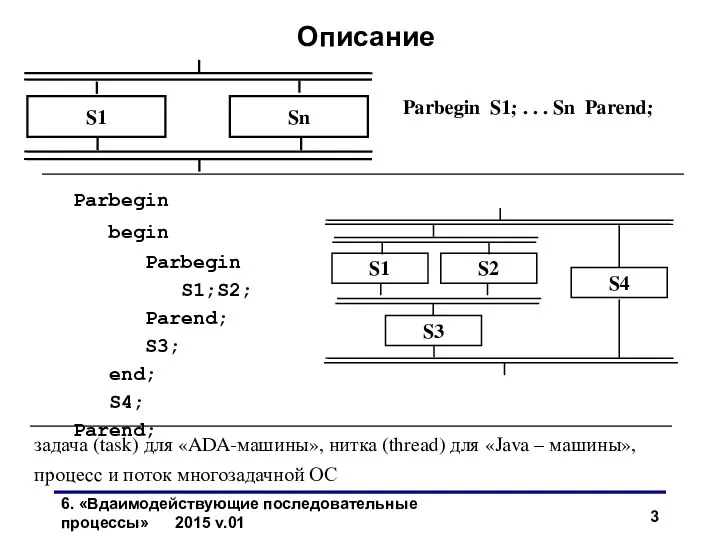
Описание
S1
Sn
Parbegin S1; . . . Sn Parend;
S1
S2
S3
S4
Parbegin
begin
Parbegin
S1;S2;
Parend;
Описание
S1
Sn
Parbegin S1; . . . Sn Parend;
S1
S2
S3
S4
Parbegin
begin
Parbegin
S1;S2;
Parend;
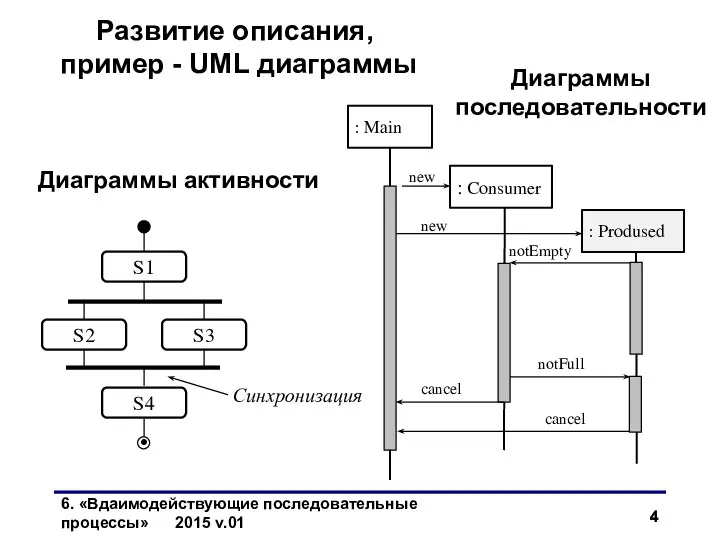
Диаграммы последовательности
Диаграммы активности
: Main
: Consumer
: Prodused
new
new
notEmpty
notFull
cancel
cancel
Развитие описания,
пример - UML диаграммы
6.
Диаграммы последовательности
Диаграммы активности
: Main
: Consumer
: Prodused
new
new
notEmpty
notFull
cancel
cancel
Развитие описания,
пример - UML диаграммы
6.
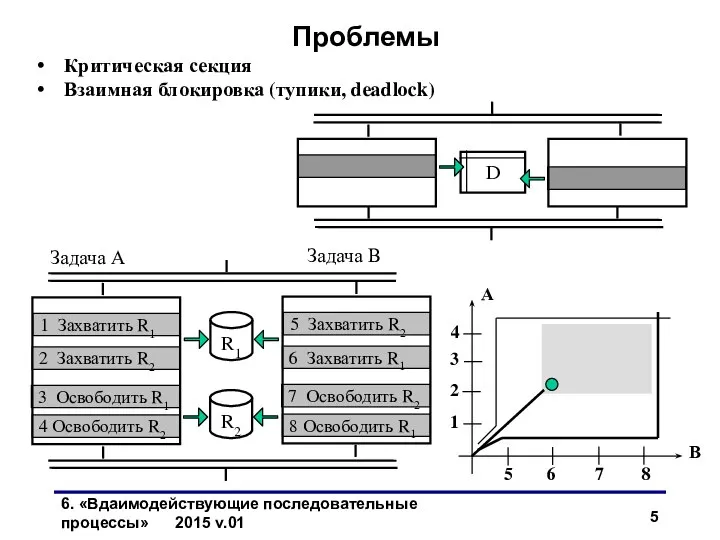
Проблемы
Критическая секция
Взаимная блокировка (тупики, deadlock)
D
1 Захватить R1
3
2
1
5
6
7
8
А
В
2 Захватить
Проблемы
Критическая секция
Взаимная блокировка (тупики, deadlock)
D
1 Захватить R1
3
2
1
5
6
7
8
А
В
2 Захватить
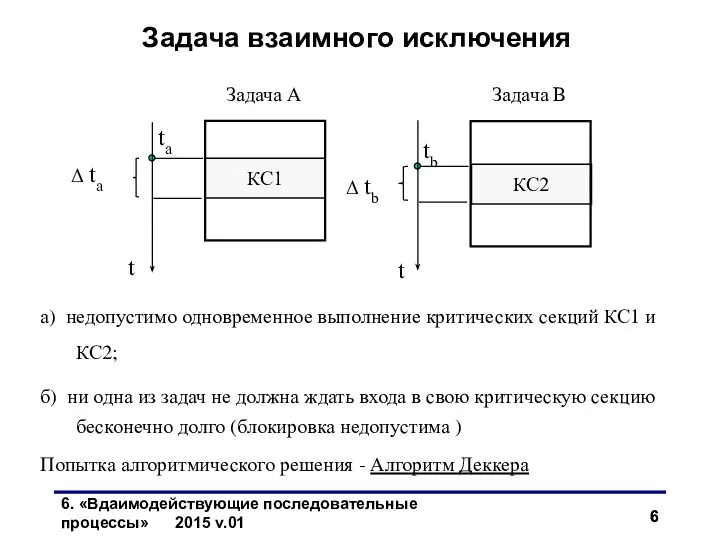
Задача А
t
ta
КС1
ta
Задача B
t
tb
tb
КС2
а) недопустимо одновременное выполнение критических секций КС1
Задача А
t
ta
КС1
ta
Задача B
t
tb
tb
КС2
а) недопустимо одновременное выполнение критических секций КС1
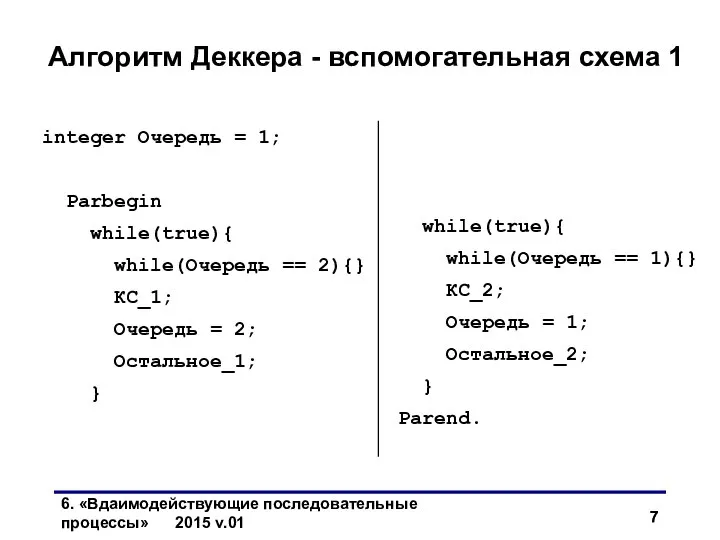
Алгоритм Деккера - вспомогательная схема 1
integer Очередь = 1;
Parbegin
while(true){
Алгоритм Деккера - вспомогательная схема 1
integer Очередь = 1;
Parbegin
while(true){
Алгоритм Деккера, вспомогательная схема 1
Вспомогательная схема 1: задача не решена
а) при
Алгоритм Деккера, вспомогательная схема 1
Вспомогательная схема 1: задача не решена
а) при
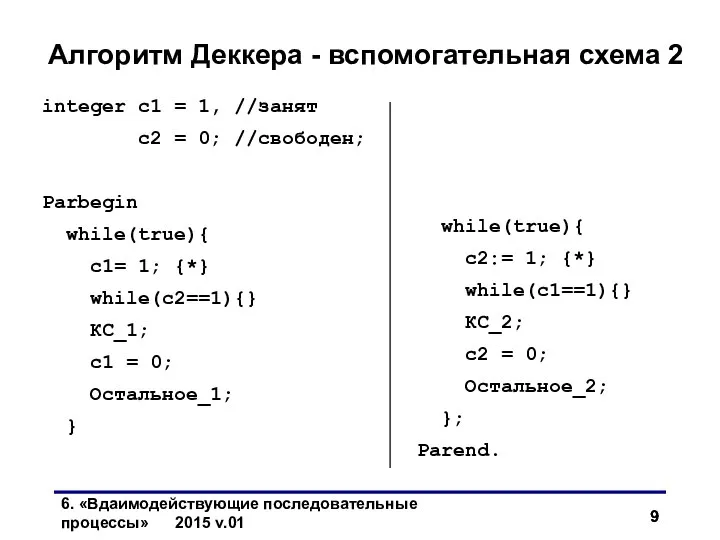
Алгоритм Деккера - вспомогательная схема 2
integer с1 = 1, //занят
с2
Алгоритм Деккера - вспомогательная схема 2
integer с1 = 1, //занят
с2
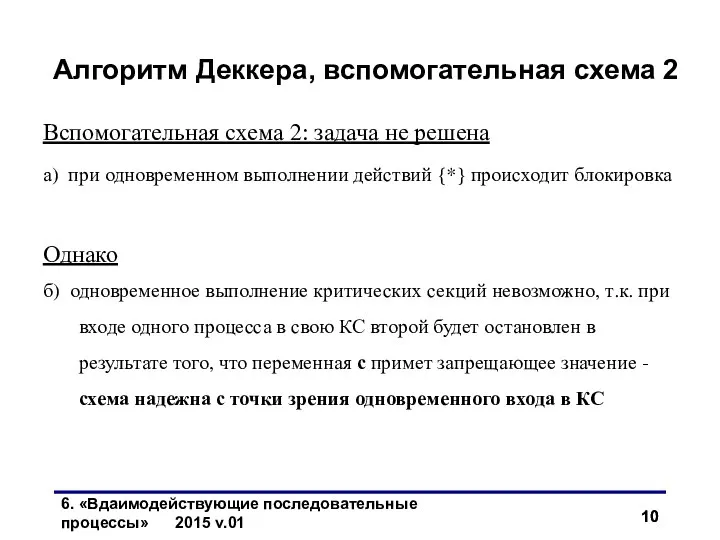
Вспомогательная схема 2: задача не решена
а) при одновременном выполнении действий {*}
Вспомогательная схема 2: задача не решена
а) при одновременном выполнении действий {*}
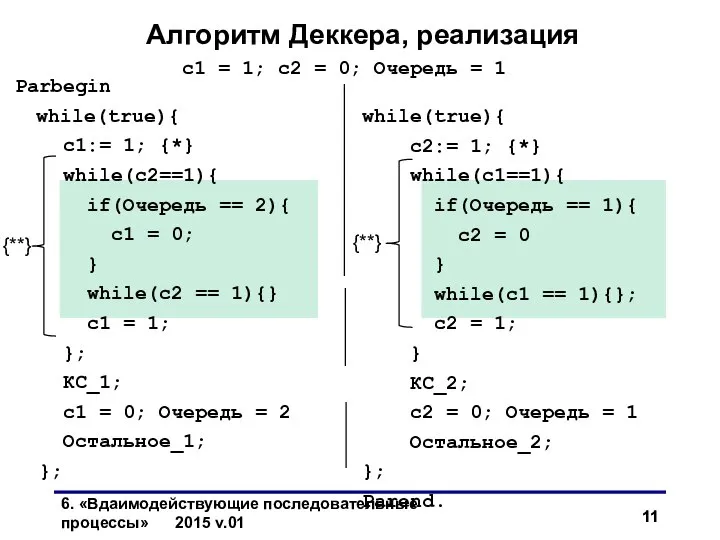
Алгоритм Деккера, реализация
Parbegin
while(true){
с1:= 1; {*}
while(с2==1){
if(Очередь == 2){
Алгоритм Деккера, реализация
Parbegin
while(true){
с1:= 1; {*}
while(с2==1){
if(Очередь == 2){
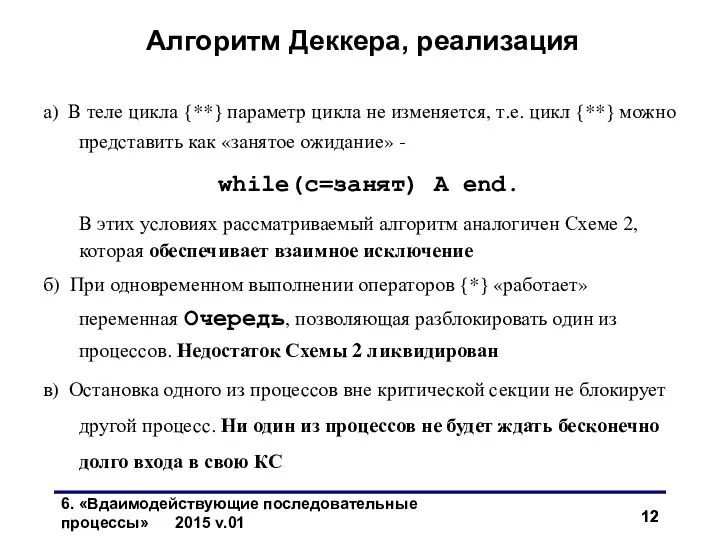
а) В теле цикла {**} параметр цикла не изменяется, т.е. цикл
а) В теле цикла {**} параметр цикла не изменяется, т.е. цикл
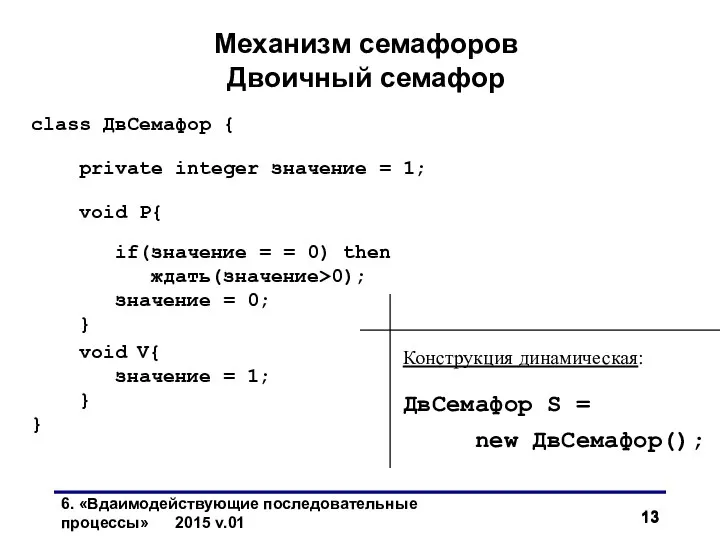
Механизм семафоров
Двоичный семафор
class ДвСемафор {
private integer значение = 1;
void
Механизм семафоров
Двоичный семафор
class ДвСемафор {
private integer значение = 1;
void
Двоичный семафор
При создании объекта семафор S с ним связывается очередь заблокированных
Двоичный семафор
При создании объекта семафор S с ним связывается очередь заблокированных
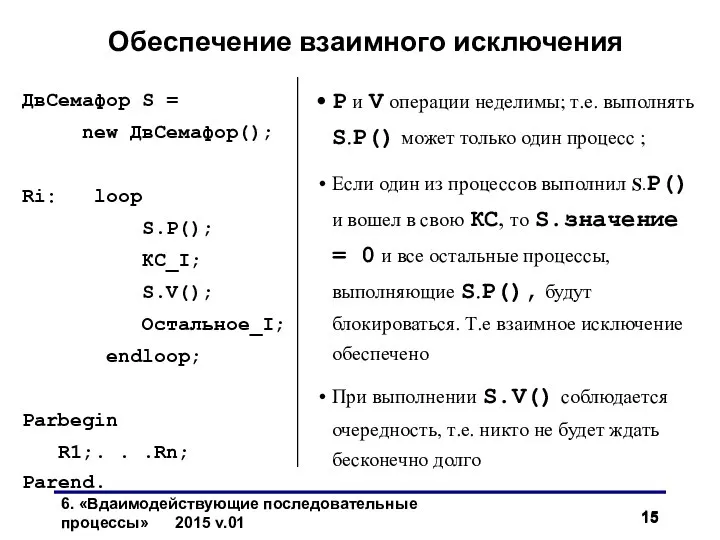
Обеспечение взаимного исключения
ДвСемафор S =
new ДвСемафор();
Ri: loop
S.P();
КС_I;
S.V();
Обеспечение взаимного исключения
ДвСемафор S =
new ДвСемафор();
Ri: loop
S.P();
КС_I;
S.V();
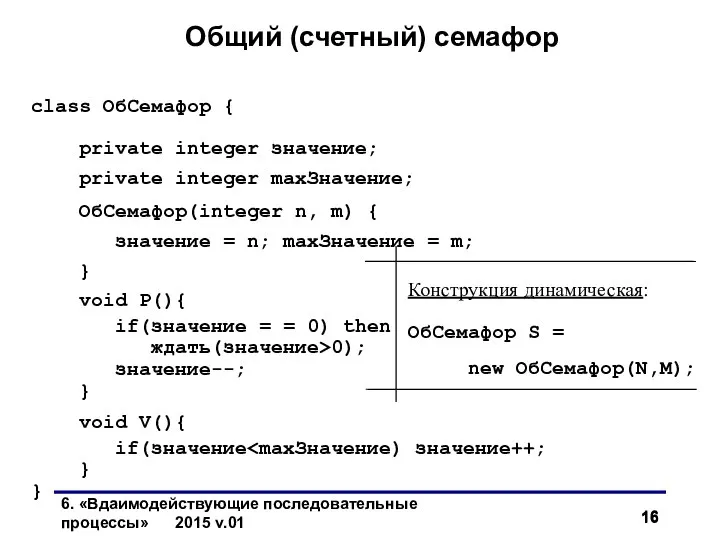
Общий (счетный) семафор
class ОбСемафор {
private integer значение;
private integer maxЗначение;
Общий (счетный) семафор
class ОбСемафор {
private integer значение;
private integer maxЗначение;
Пример: «Поставщик-Потребитель»
Поставщик: производит единицы информации и записывает их в буфер А,
Пример: «Поставщик-Потребитель»
Поставщик: производит единицы информации и записывает их в буфер А,
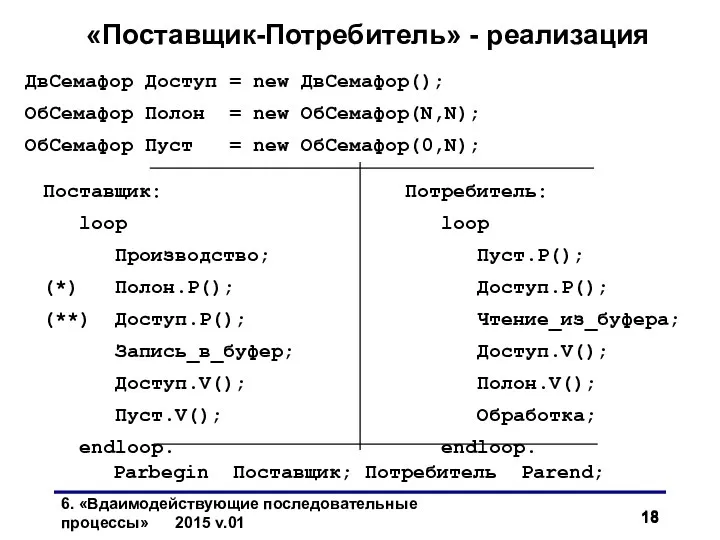
Parbegin Поставщик; Потребитель Parend;
Поставщик:
loop
Производство;
(*) Полон.P();
(**) Доступ.P();
Запись_в_буфер;
Доступ.V();
Parbegin Поставщик; Потребитель Parend;
Поставщик:
loop
Производство;
(*) Полон.P();
(**) Доступ.P();
Запись_в_буфер;
Доступ.V();
6. «Вдаимодействующие последовательные процессы» 2015 v.01
Недостатки механизма семафоров
Низкий уровень, слабая защищенность
6. «Вдаимодействующие последовательные процессы» 2015 v.01
Недостатки механизма семафоров
Низкий уровень, слабая защищенность
6. «Вдаимодействующие последовательные процессы» 2015 v.01
Пример сервисов, поддерживающих семафоры в RTEK
KC_CloseSema
6. «Вдаимодействующие последовательные процессы» 2015 v.01
Пример сервисов, поддерживающих семафоры в RTEK
KC_CloseSema
6. «Вдаимодействующие последовательные процессы» 2015 v.01
KC_LookupSema – look up a semaphore’s
6. «Вдаимодействующие последовательные процессы» 2015 v.01
KC_LookupSema – look up a semaphore’s
 Презентация "Введение в инженерную графику" - скачать презентации по МХК
Презентация "Введение в инженерную графику" - скачать презентации по МХК ЭкоЧашка Фестиваль Экологического Кино 2012 Новые фильмы Новый формат Новый взгляд Новое будущее
ЭкоЧашка Фестиваль Экологического Кино 2012 Новые фильмы Новый формат Новый взгляд Новое будущее World tour. Do you know any famous places? тест
World tour. Do you know any famous places? тест Перегрузка операций
Перегрузка операций Тасымалдаушы машиналар жіктелімі
Тасымалдаушы машиналар жіктелімі Перербург в творчестве А.С. Пушкина
Перербург в творчестве А.С. Пушкина Generic Collections Java Core
Generic Collections Java Core Развертки поверхностей
Развертки поверхностей Устройство ЭВМ
Устройство ЭВМ Культура арабского Востока
Культура арабского Востока Презентация Международное движение трудовых и финансовых ресурсов
Презентация Международное движение трудовых и финансовых ресурсов Политическая коммуникация
Политическая коммуникация Космо-Дамианский храм
Космо-Дамианский храм Ser y estar en español
Ser y estar en español Формы права
Формы права Тренинг "Сплочение коллектива". Познание стран мира
Тренинг "Сплочение коллектива". Познание стран мира Внешняя политика государства. Теории и реалии
Внешняя политика государства. Теории и реалии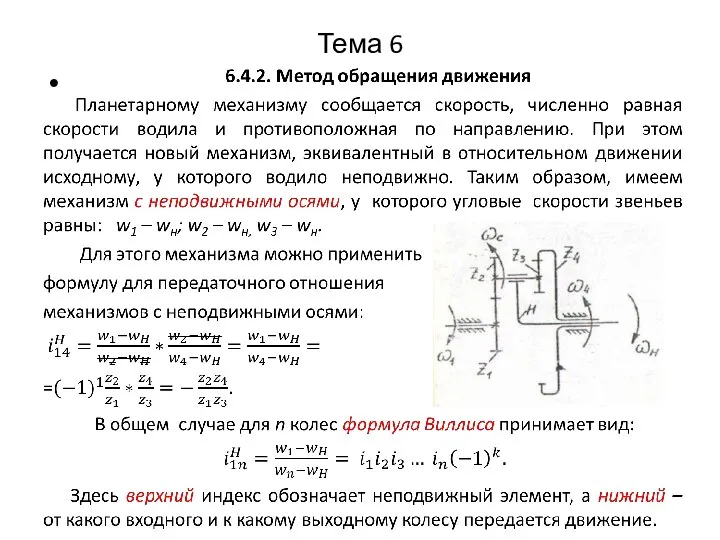 Метод обращения движения
Метод обращения движения Fundamental Concepts of OOP
Fundamental Concepts of OOP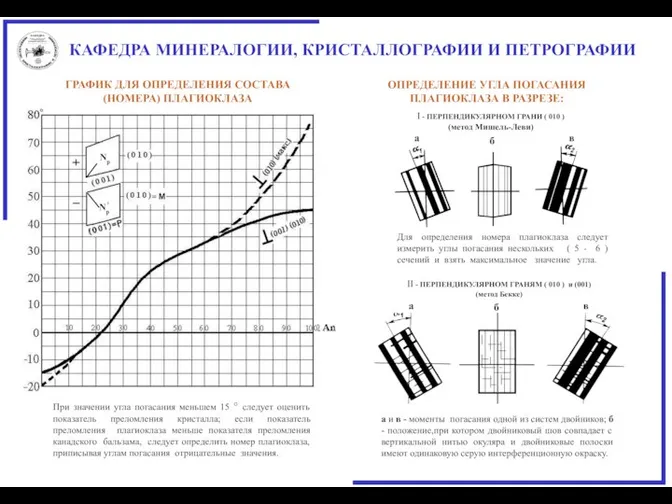 Определение номера плагиоклаза
Определение номера плагиоклаза Работа с массивами и матрицами в языке программирования
Работа с массивами и матрицами в языке программирования Культура исламского мира
Культура исламского мира Религия. Всё о религии и не только
Религия. Всё о религии и не только Горное право
Горное право Развитие двигательных способностей
Развитие двигательных способностей  Сон. Память. Мотивации. Эмоции
Сон. Память. Мотивации. Эмоции Голбол. Правила
Голбол. Правила Модель параллельного программирования. Лекция 2
Модель параллельного программирования. Лекция 2