- БКУ КА

Содержание
- 2. Уравнение космической связи
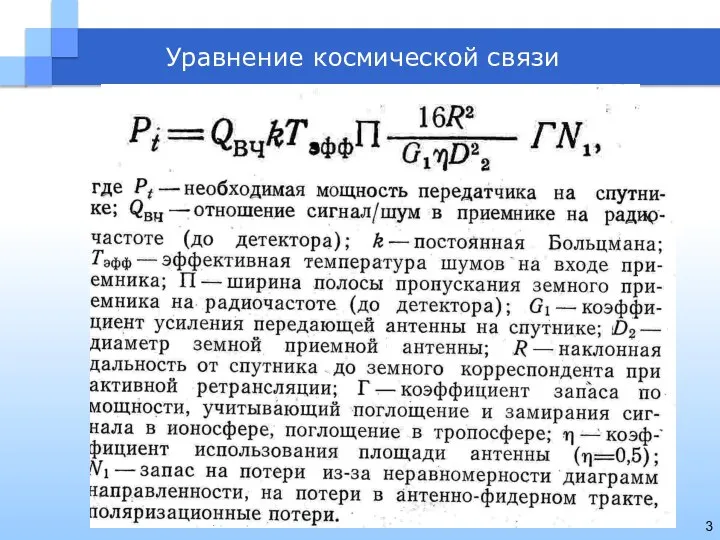
- 3. Уравнение космической связи
- 4. Уравнение космической связи Из указанного соотношения видно: - Основными параметрами космической связи являются: размеры наземной антенны,
- 5. Уравнение космической связи Для дальнего космоса и высоких орбит очень большое значение имеет коэффициент N1, на
- 6. Уравнение космической связи Спутники НТВ (непосредственного телевидения -типа Экспресс-АТ) имеют гигантскую мощность излучения (несколько киловатт), очень
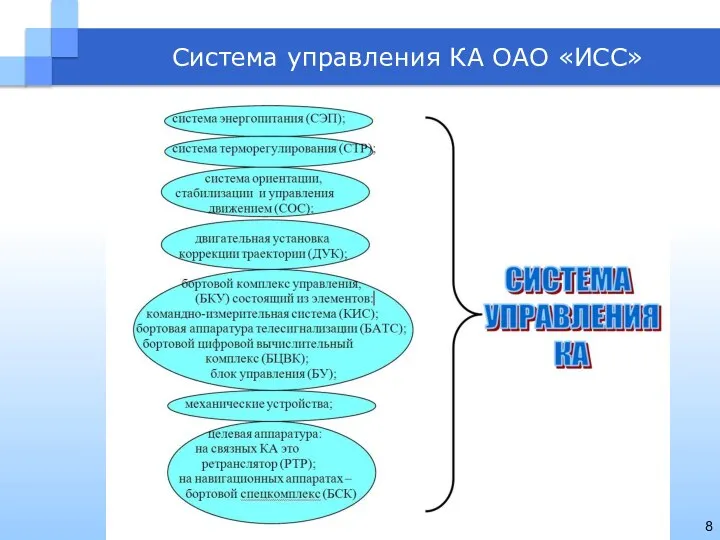
- 7. Система управления КА ОАО «ИСС» С самых первых спутников и космических кораблей, их система управления строилась
- 8. Система управления КА ОАО «ИСС»
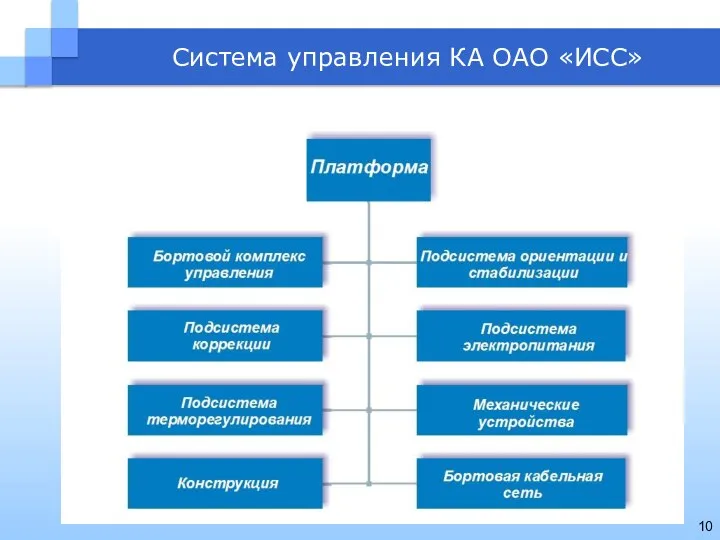
- 9. Система управления КА ОАО «ИСС» Сейчас принято разделять КА на платформу – это универсальный блок обеспечивающих
- 10. Система управления КА ОАО «ИСС»
- 11. Система управления КА Специфика КА нашего предприятия требует большой автономности управления КА. То есть КА сразу
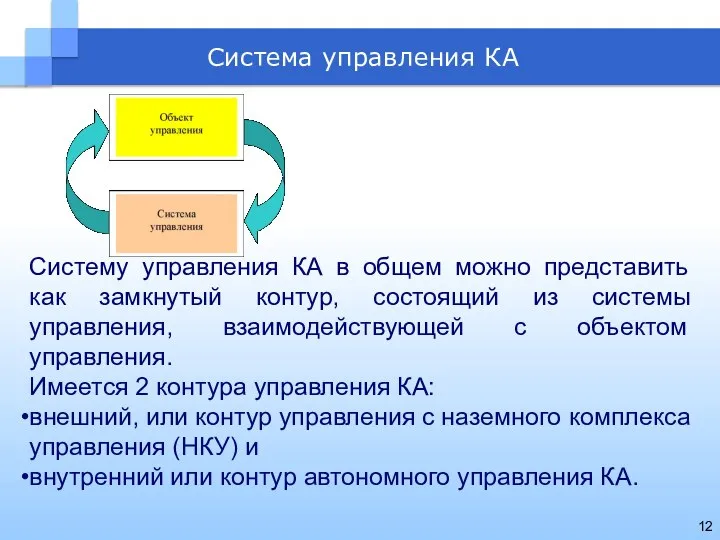
- 12. Система управления КА Систему управления КА в общем можно представить как замкнутый контур, состоящий из системы
- 13. Система управления КА СЭП - основная система, обеспечивающая энергопитание от 2-х источников: СБ и АБ. При
- 14. Система управления КА СТР - основная система, выполняющая терморегулирование. На КА с контейнером она поддерживает температуру
- 15. Система управления КА ДУ - основная система, обеспечивающая движение по орбите и ориентацию спутника. Выполнена в
- 16. Система управления КА СОС - основная система, выполняющая ориентацию и стабилизацию КА. Обеспечивает сбор данных с
- 17. Система управления КА Основные режимы СОС: РУ – в режиме успокоения снимаются данные с датчиков скоростей
- 18. Система управления КА МУ - основные устройства, обеспечивающие развертывание КА из сложенного положения под обтекателем ракеты,
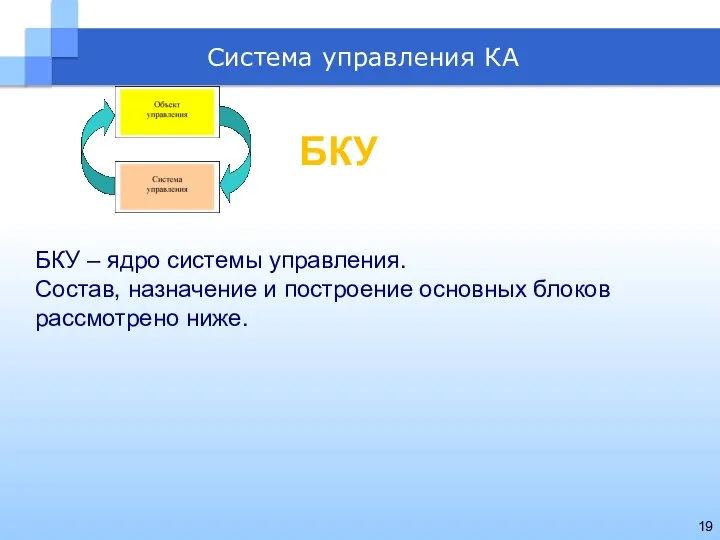
- 19. Система управления КА БКУ – ядро системы управления. Состав, назначение и построение основных блоков рассмотрено ниже.
- 20. БКУ КА ОАО «ИСС» на 2000 год БКУ БУ БИВК КИС ПО БКУ
- 21. Система управления КА Аппаратура КА, на которой строится система управления КА, всегда выполнялась с учетом последних
- 22. Система управления КА Как видно из описанного выше, системы жизнеобеспечения СЭП, СТР, ДУ, СОС, мех. устройства
- 23. Система управления КА Важнейший шаг в развитии системы управления КА произошел с появлением бортовых ЭВМ, которые
- 24. Система управления КА Что дало применение управляющих вычислительных систем: универсальность и унификацию систем управления. Для разных
- 25. БКУ КА ОАО «ИСС» Таким образом, мы подошли к определению понятия БКУ как ядра системы управления
- 26. БКУ КА ОАО «ИСС» К БКУ для КА НПО ПМ относятся: центральные вычислительные средства КА, объединенные
- 27. БКУ КА ОАО «ИСС» С появлением вычислительных средств космического применения (то есть малогабаритных и с минимальных
- 28. БКУ КА ОАО «ИСС» Из указанных соображений на КА используется один централизованный БЦВК, выполняющий множество функций.
- 29. Задачи БКУ
- 30. Выше было дано определение БКУ как центральной части системы управления КА. Далее мы конкретизируем и раскроем
- 31. БКУ как ядро системы управления должен обеспечивать: Управляющую среду для реализации задач контуров управления бортовых систем
- 32. Из определения БКУ видно, что имеются задачи БКУ более низкого уровня (замыкание контуров управления подсистем КА)
- 33. Для начала разложим указанные задачи на более частные функции: Задачи управления подсистемами КА Задачи автономного управления
- 34. Задачи управления подсистемами КА: организация работы БПО; выполнение функций управления в локальных контурах подсистем КА. БКУ
- 35. Задачи автономного управления КА в целом: управление и контроль бортовыми системами КА на УВ; приведение бортовых
- 36. Задачи внешнего управления с Земли: управление и мониторинг КА с внешнего контура управления в режиме реального
- 37. Задачи обеспечения работы КА при испытаниях и при подготовке КА к запуску: управление и контроль КА
- 39. Скачать презентацию

Уравнение космической связи
Уравнение космической связи
Уравнение космической связи
Уравнение космической связи
Уравнение космической связи
Из указанного соотношения видно:
- Основными параметрами космической связи являются:
размеры
Уравнение космической связи
Из указанного соотношения видно:
- Основными параметрами космической связи являются:
размеры
Уравнение космической связи
Для дальнего космоса и высоких орбит очень большое значение
Уравнение космической связи
Для дальнего космоса и высоких орбит очень большое значение
Уравнение космической связи
Спутники НТВ (непосредственного телевидения -типа Экспресс-АТ) имеют гигантскую мощность
Уравнение космической связи
Спутники НТВ (непосредственного телевидения -типа Экспресс-АТ) имеют гигантскую мощность
Система управления КА ОАО «ИСС»
С самых первых спутников и космических кораблей,
Система управления КА ОАО «ИСС»
С самых первых спутников и космических кораблей,
Система управления КА ОАО «ИСС»
Система управления КА ОАО «ИСС»
Система управления КА ОАО «ИСС»
Сейчас принято разделять КА на платформу –
Система управления КА ОАО «ИСС»
Сейчас принято разделять КА на платформу –
Система управления КА ОАО «ИСС»
Система управления КА ОАО «ИСС»
Система управления КА
Специфика КА нашего предприятия требует большой автономности управления КА.
Система управления КА
Специфика КА нашего предприятия требует большой автономности управления КА.
Система управления КА
Систему управления КА в общем можно представить как замкнутый
Система управления КА
Систему управления КА в общем можно представить как замкнутый
Система управления КА
СЭП - основная система, обеспечивающая энергопитание от 2-х
Система управления КА
СЭП - основная система, обеспечивающая энергопитание от 2-х
Система управления КА
СТР - основная система, выполняющая терморегулирование. На КА
Система управления КА
СТР - основная система, выполняющая терморегулирование. На КА
Система управления КА
ДУ - основная система, обеспечивающая движение по орбите
Система управления КА
ДУ - основная система, обеспечивающая движение по орбите
Система управления КА
СОС - основная система, выполняющая ориентацию и стабилизацию
Система управления КА
СОС - основная система, выполняющая ориентацию и стабилизацию
Система управления КА
Основные режимы СОС:
РУ – в режиме успокоения снимаются данные
Система управления КА
Основные режимы СОС:
РУ – в режиме успокоения снимаются данные
Система управления КА
МУ - основные устройства, обеспечивающие развертывание КА из сложенного
Система управления КА
МУ - основные устройства, обеспечивающие развертывание КА из сложенного
Система управления КА
БКУ – ядро системы управления.
Состав, назначение и построение основных
Система управления КА
БКУ – ядро системы управления.
Состав, назначение и построение основных

БКУ КА ОАО «ИСС»
на 2000 год
БКУ
БУ
БИВК
КИС
ПО БКУ
БКУ КА ОАО «ИСС»
на 2000 год
БКУ
БУ
БИВК
КИС
ПО БКУ
Система управления КА
Аппаратура КА, на которой строится система управления КА, всегда
Система управления КА
Аппаратура КА, на которой строится система управления КА, всегда
Система управления КА
Как видно из описанного выше, системы жизнеобеспечения СЭП, СТР,
Система управления КА
Как видно из описанного выше, системы жизнеобеспечения СЭП, СТР,
Система управления КА
Важнейший шаг в развитии системы управления КА произошел с
Система управления КА
Важнейший шаг в развитии системы управления КА произошел с
Система управления КА
Что дало применение управляющих вычислительных систем:
универсальность и унификацию
Система управления КА
Что дало применение управляющих вычислительных систем:
универсальность и унификацию
БКУ КА ОАО «ИСС»
Таким образом, мы подошли к определению понятия БКУ
БКУ КА ОАО «ИСС»
Таким образом, мы подошли к определению понятия БКУ
БКУ КА ОАО «ИСС»
К БКУ для КА НПО ПМ относятся:
центральные
БКУ КА ОАО «ИСС»
К БКУ для КА НПО ПМ относятся:
центральные
БКУ КА ОАО «ИСС»
С появлением вычислительных средств космического применения (то есть
БКУ КА ОАО «ИСС»
С появлением вычислительных средств космического применения (то есть
БКУ КА ОАО «ИСС»
Из указанных соображений на КА используется один централизованный
БКУ КА ОАО «ИСС»
Из указанных соображений на КА используется один централизованный
Задачи БКУ
Задачи БКУ
Выше было дано определение БКУ как центральной части системы управления КА.
Выше было дано определение БКУ как центральной части системы управления КА.
БКУ как ядро системы управления должен обеспечивать:
Управляющую среду для реализации задач
БКУ как ядро системы управления должен обеспечивать:
Управляющую среду для реализации задач
Из определения БКУ видно, что имеются задачи БКУ более низкого уровня
Из определения БКУ видно, что имеются задачи БКУ более низкого уровня
Для начала разложим указанные задачи на более частные функции:
Задачи управления подсистемами
Для начала разложим указанные задачи на более частные функции:
Задачи управления подсистемами
Задачи управления подсистемами КА:
организация работы БПО;
выполнение функций управления в локальных контурах
Задачи управления подсистемами КА:
организация работы БПО;
выполнение функций управления в локальных контурах
Задачи автономного управления КА в целом:
управление и контроль бортовыми системами
Задачи автономного управления КА в целом:
управление и контроль бортовыми системами
Задачи внешнего управления с Земли:
управление и мониторинг КА с внешнего контура
Задачи внешнего управления с Земли:
управление и мониторинг КА с внешнего контура
Задачи обеспечения работы КА при испытаниях и при подготовке КА к
Задачи обеспечения работы КА при испытаниях и при подготовке КА к
 JavaScript. Функции
JavaScript. Функции Мастерица-рукодельница
Мастерица-рукодельница Правонарушения и юридическая ответственность
Правонарушения и юридическая ответственность Становление науки государственного управления
Становление науки государственного управления Михаил Евграфович Салтыков-Щедрин (1826 - 1889)
Михаил Евграфович Салтыков-Щедрин (1826 - 1889) Архитектурно-конструктивные элементы и детали стен
Архитектурно-конструктивные элементы и детали стен Тәжірибелік жұмыс uses GraphABC
Тәжірибелік жұмыс uses GraphABC Представление информации в технических устройствах. Компьютеры как системы обработки информации
Представление информации в технических устройствах. Компьютеры как системы обработки информации Турбаза РУБАС приглашает вас отдохнуть на берегу Каспийского моря
Турбаза РУБАС приглашает вас отдохнуть на берегу Каспийского моря Нормаль и касательная плоскость к поверхности
Нормаль и касательная плоскость к поверхности Глава 4. Экономика государства 23. Инфляция
Глава 4. Экономика государства 23. Инфляция  Узлы. Техника вязания, применение
Узлы. Техника вязания, применение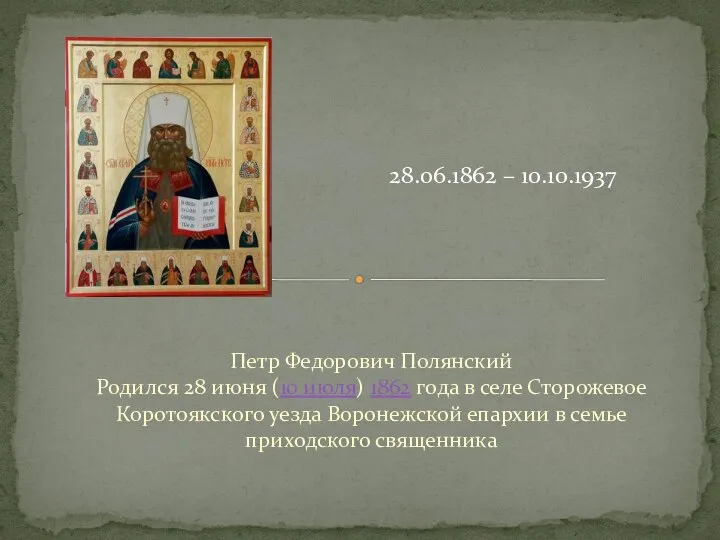 Житие священномученика Петра Крутицкого
Житие священномученика Петра Крутицкого Завод - ШУГЛА - ШУНГИТ
Завод - ШУГЛА - ШУНГИТ Формирование и контроль запасов
Формирование и контроль запасов  Внедрение стандартов третьего поколения
Внедрение стандартов третьего поколения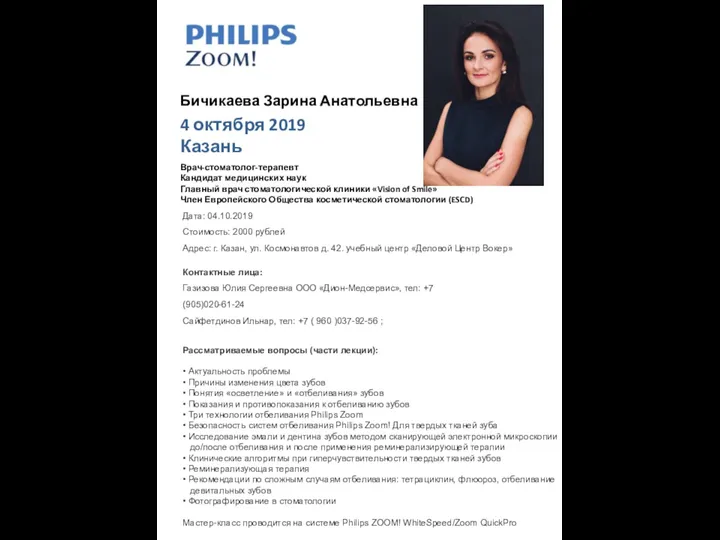 Деловой Центр Вокер. Главный врач стоматологической клиники «Vision of Smile»
Деловой Центр Вокер. Главный врач стоматологической клиники «Vision of Smile» Технология производства уксусной кислоты окислением нефтяных фракций
Технология производства уксусной кислоты окислением нефтяных фракций МЕЖДУНАРОДНАЯ СИСТЕМА СЕРТИФИКАЦИИ
МЕЖДУНАРОДНАЯ СИСТЕМА СЕРТИФИКАЦИИ  Нормативно-правовые документы по ультразвуковой диагностике
Нормативно-правовые документы по ультразвуковой диагностике ЗАКОН 12 ТАБЛИЦ
ЗАКОН 12 ТАБЛИЦ  Право интеллектуальной собственности. Промышленная собственность и разрешение споров
Право интеллектуальной собственности. Промышленная собственность и разрешение споров Статистические таблицы и их функции
Статистические таблицы и их функции Моя продукция faberlic
Моя продукция faberlic И.С.Тургенев (1818-1883)
И.С.Тургенев (1818-1883) Политика. Часть1. Подготовка к ЕГЭ по обществознанию
Политика. Часть1. Подготовка к ЕГЭ по обществознанию Геохронология
Геохронология Презентация "МАКРОЭКОНОМИЧЕСКАЯ НЕСТАБИЛЬНОСТЬ" - скачать презентации по Экономике
Презентация "МАКРОЭКОНОМИЧЕСКАЯ НЕСТАБИЛЬНОСТЬ" - скачать презентации по Экономике